Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Thomas McDonald | -- | 2662 | 2022-11-21 11:40:51 | | | |
| 2 | Amina Yu | + 14 word(s) | 2676 | 2022-11-22 01:25:42 | | | | |
| 3 | Amina Yu | + 2 word(s) | 2678 | 2022-11-22 01:27:35 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Mcdonald, T.; Robinson, M.; Tian, G.Y. 3D Visualisation in Railway Tunnel SubSurface Inspection. Encyclopedia. Available online: https://encyclopedia.pub/entry/35556 (accessed on 13 July 2026).
Mcdonald T, Robinson M, Tian GY. 3D Visualisation in Railway Tunnel SubSurface Inspection. Encyclopedia. Available at: https://encyclopedia.pub/entry/35556. Accessed July 13, 2026.
Mcdonald, Thomas, Mark Robinson, Gui Yun Tian. "3D Visualisation in Railway Tunnel SubSurface Inspection" Encyclopedia, https://encyclopedia.pub/entry/35556 (accessed July 13, 2026).
Mcdonald, T., Robinson, M., & Tian, G.Y. (2022, November 21). 3D Visualisation in Railway Tunnel SubSurface Inspection. In Encyclopedia. https://encyclopedia.pub/entry/35556
Mcdonald, Thomas, et al. "3D Visualisation in Railway Tunnel SubSurface Inspection." Encyclopedia. Web. 21 November, 2022.
Copy Citation
Railway Tunnel SubSurface Inspection (RTSSI) is essential for targeted structural maintenance. ‘Effective’ detection, localisation and characterisation of fully concealed features (i.e., assets, defects) is the primary challenge faced by RTSSI engineers, particularly in historic masonry tunnels. Clear conveyance and communication of gathered information to end-users poses the less frequently considered secondary challenge.
railways
tunnel
subsurface
inspection
visualisation
ground penetrating radar
360GPR
1. Visual Methods
Visual assessment is the longest-established NDI method for RTI and is still widely adopted today, particularly across the UK and Chinese rail networks [1][2]. Methods were subdivide into two classes: (i) Traditional and (ii) Modernised. Traditional evaluation is exclusively based on engineers’ learnt association between visual indicators (e.g., workmanship inconsistencies, material fatigue hallmarks) and fault likelihood. Problematically, engineers infrequently share similar extents of practical experience, resulting in high subjectivity. Crosschecks and multi-pass surveys can partially reduce accuracy and consistency variations but take significantly longer to implement at increased resource cost, closure times and rail worker risk. Handwritten notetaking ambiguity, incompleteness and inherent susceptibility to human error also present issues for later analysis. They entice misinterpretation, causing unnecessary delays and disruption. However, being low expense and reasonably accurate (if performed by more experienced engineers), coupled with human-aptitude at informed predications from non-structural information (e.g., history of construction practices); traditional methods can time-efficiently localise visibly degraded quadrants requiring repair.
Modernised methods mostly utilise Close-Range Photogrammetry (CRP) to provide referenceable intrados imagery. Units commonly employ RGB optical cameras mounted on moving platforms for stability and time-efficiency. These include: Pushcarts/Rail-Trolley (RT), Road-Rail Vehicle (RRV) and Robotic Traction Unit (RTU). Merging resultant overlapping orthophotos via mosaicing [3][4] allows tunnels to be ‘unwrapped’—permitting analysis in 2D—although studies were more frequently find that adopt 3D CRP topography model reconstruction via ‘Structure from Motion’ (SfM) algorithms [5][6][7][8].
A noteworthy recent innovation includes ‘Digital Imaging for Condition Asset Monitoring System’ (DIFCAM) [9]; an RRV-mounted optical array deigned to reduce crew sizes and inspection durations. Although 2014 marks DIFCAM’s last major study [10], scope of its successor project DIFCAM Evolution [11] discusses subsurface imaging and automated defect recognition technology integration. However, due Visual assessment is the longest-established NDI method for RTI and is still widely a lack of available details or recent publication activity, this was resided to speculation only. Of comparable interest, [12] presents a ‘Moving Tunnel Profile Measurement’ system (MTPM-1) which deploys a novel rotating camera for CRP that tracks a translating laser target to achieve swift 3D capture of a 100 m tunnel in 3 min. Use of a more lightweight camera is necessary for smoother rotation and reduction of prevalent lens-distortion.
Overall, visual methods provide extensive surface inspection prospects but are impractical for subsurface inspection since tunnel intrados’ are opaque, except where defects have already exposed the subsurface. For a summary of defect types see following section and consult ‘Ring Separation and Debonding’. It was believed that proposed revisions of MTPM-1 show promise and would further benefit from fusion with automatous RTU locomotion described in [13] to facilitate 24/7 remote deployment.
2. Acoustic Methods
Subsurface features modify the characteristics of propagating soundwaves. Acoustic methods pulse predefined waveforms into the tunnel intrados and analyse resultant distortion and delay to identify audible indicators of defects. Acoustic methods can be subdivided into Ultrasonic Testing (UST) and Infrasonic Testing (IST). In UST, reductions in travelling pulse velocity correspond to elastic deformation of defected regions [14][15]; contrastingly for IST, defects are indicated by high resonant frequency components in returning pulses [16].
It was only encountered two research groups directly applying UST to tunnel subsurface inspection. In [17], UST is extremely time-inefficient, requiring 9–25 min to scan 1m of tunnel wall and necessitating use of a preliminary GPR scan to localise suspected features. Likewise, despite robotic automation, UST scans performed by tunnel profiler ROBOSPECT achieve comparably inefficient durations of one hour to scan 6m [18] and are optimised for surface level crack and spall detection only [19][20]. Evidently, UST can be considered ill-suited for RTSSI, where surveys must be swift to minimise periods of tunnel closure.
IST proves more useful for RTSSI. Traditionally, hammer-strike emissions are performed by experienced human operatives who detect audible defect indicators ‘by ear’ alone, but those remaining are few, approaching retirement and are not being replaced. Faster robotic schemes are now preferential, boasting improved high level access achieved by mounting hammers to robotic arms [21][22][23][24] on Variable Guide Frames [25] and UAVs [26][27]. It was notably uncovered a unique non-contact infrasonic UAV system [28] successfully inducing hammer-strike reminiscent flexural vibrations in infrastructure at distances of up to 5 m, for which application to remote-RTSSI presents an interesting research venture.
Detrimentally, inherent reliance on human interpretation of audio-spectra (which do not physically resemble subsurface features they convey) critically limits the insight non-specialist end-users can draw from IST without costly training or additional contextual metadata (e.g., maps of striking locations).
3. Laser Methods
Terrestrial Laser Scanning (TLS), also termed LiDAR (Light Detection And Ranging), utilises directed lasers to scan the visible tunnel intrados, generating dense 3D point clouds (Figure 1a) at up to 1 × 106 datapoints per second [29][30][31][32]. Visible light impulses reflect with variable intensity informing relative distances. However, datapoints lack classification labels and do not penetrate the subsurface. This makes segmentation of tunnel features challenging [33], but does permit direct insight into subsurface condition (e.g., profile distortions indicate abnormal strains) [34]. Pursuit of TLS integration with counterpart penetrating NDI methods marks an emerging avenue of long-term research. It was noted that the development of a standardised, efficient and reliable method to perform the essential alignment of multiple point cloud datasets—to form a unified digital environments—will be a key milestone for innovators to achieve before practical deployment becomes mainstream RTSSI practice.
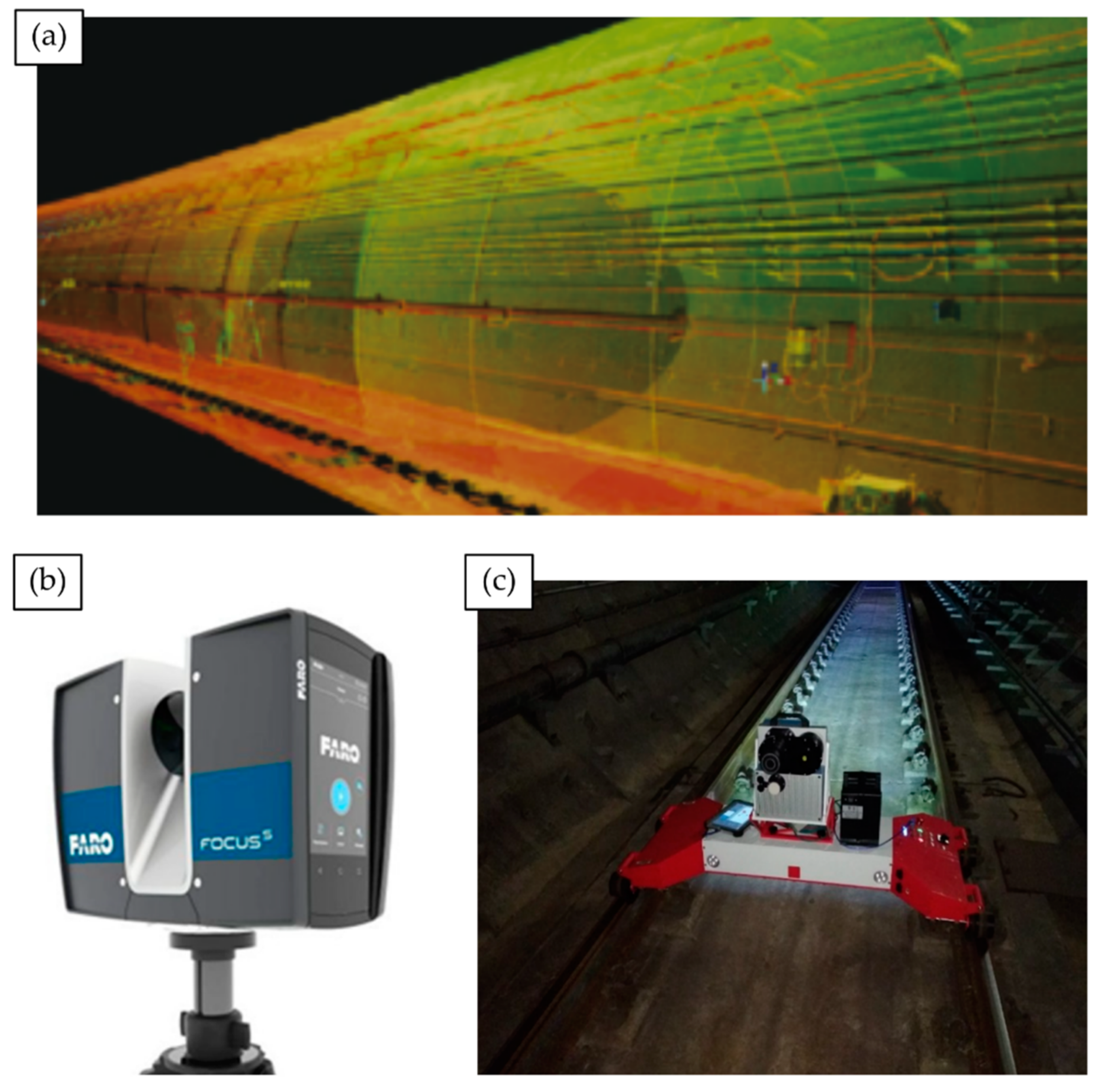
Figure 1. TLS for tunnel inspection. (a) 3D point cloud returned from a TLS metro tunnel survey [35]; (b) A FARO® FOCUS 350 scanning module, commonly deployed for infrastructure surveys; (c) TMMS rail-trolley transports a Z+F9012 to capture a TLS point cloud of a Zhengzhou metro tunnel.
Returning to standalone laser methods, it was found TLS-RTI studies and commercial contractors most commonly deploy FARO® FOCUS scanning modules [36][37][38][39] (Figure 2b) or the Z+F Profiler® 9012 [35][40][41] to assimilate RGB optical photography for improved end-user navigational ease in recovered point clouds. Noteworthy innovations include an automated deformation detection assembly [42], which utilises a novel Circular Laser Scanning System (CLSS), highlighting the practicality of adopting circular sensing arrays that complement natural tunnel curvature.
Notable innovation is showcased in the Tunnel Monitoring and Measurement System (TMMS) developed by [35]. The prototype visualisation framework utilises a Z+F Profiler® 9012 mounted on a bespoke rail trolley (Figure 1c) to pass RGB LiDAR tunnel point clouds and a ‘roaming video’ feed of intrados condition to an engineer’s tablet PC. The developed hardware bares strong similarities with a similar mobile TLS apparatus used in [39] employing a FARO X330 scanner. Validation trials in China’s Zhengzhou Metro network demonstrate practical deployment capability but also relay that primary functions of ingress and cross-sectional deformation detection suffer noteworthy accuracy and stability reduction when applied to non-circular tunnel profiles (e.g., horseshoe, elliptical, etc.). TMMS therefore flags the importance adaptability in the design of new RTSSI solutions for wide-scale deployment, particularly on older rail networks (e.g., UK) which adopt multiple ‘standard’ tunnel cross-section variants.
4. Thermographic Methods
Subsurface faults modify thermal emission patterns of nearby interior tunnel surfaces, causing abnormal variations. Visualising temperature distribution profiles (Thermometry) facilitates localisation of suspected near-surface features (Thermography) [43][44], but recovery of specific attributes defers to higher quality UST or localised GPR imaging. Active Thermography (ACT) heats surfaces using halogen lamps [45], air guns [46] or inductive-heating elements [47] to induce exaggerated thermal responses. Abandoned testing by [48] and remarks of [49] affirm that heating element operation for RTSSI would incur impractical cost and could debond masonry, explaining its literary absence. It was found that using of infrared camera arrays for passive Infrared Thermography (IRT) is more commonplace, owing to swifter and less costly implementation. Leading systems identify both air and water filled voids, with individual scans displayable as 2D panoramic imagery [43] or pioneering 3D mesh overlays on digital structural models rendered using TOSCA-FI [50] (Figure 2) or Augmented Reality [51]. Despite recent work, Thermography still exhibits persistent limitations [44] undermining direct application to RTSSI:
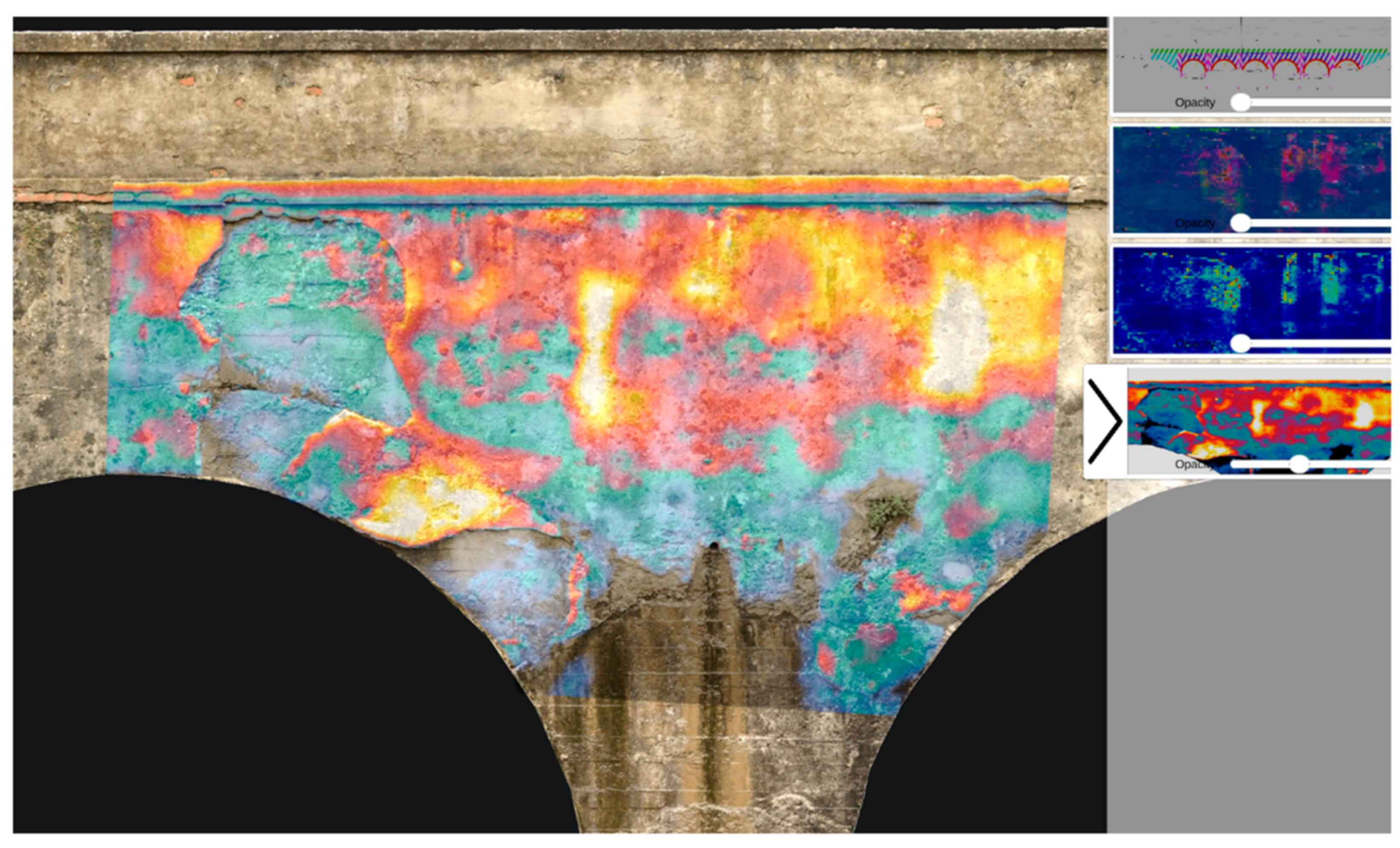
Figure 2. TOSCA-FI Software Platform: 2D heatmap overlays on a 3D digital bridge model [50].
-
Results are highly sensitive to ambient temperature conditions which diminishes anomaly contrast (e.g., daily and seasonal variation);
-
Thermal insulation and heat-resistant coatings used for tunnel temperate regulation and fire resilience can skew results. High thermal dissipation can easily restrict penetration d < 30 mm [52];
-
Subsurface water content variation (e.g., increased permeation following rainfall or snow) can mask or exaggerate thermal profiles of faults;
-
Enclosed, curved tunnel geometry restricts available viewing angles and confine results to 2D, even in a 3D mesh overlay, making inference of feature depth and physical form very challenging even for experienced operatives.
5. Gravity Methods
Gravity Surveys (GS) use portable gravimeters [53], placed at regularly spaced sampling locations, to measure subtle variation in gravity surrounding railway tunnels [54]. Anomalies observed in returned Complete Bouguer Anomaly (CBA) curves inform subsurface material composition [55] and indirectly, structural health assessment. Regional trends in subsurface density conveyed by CBA curves can vary across scales comparable to the tunnel itself, granting extensive inspection coverage. Likewise, localised negative field displacements can indicate the presence of irregular low density regions, strong indicators of voids and deformation zones [56][57][58]. However, few common defects exhibit substantially large density variations (compared to their surrounding landmass) that would noticeably influence a CBA curve, which despite informing the general nature of the subsurface, does not comprehensively nor clearly visualise subsurface features themselves. Moreover, localising large features relative to the tunnel (i.e., in front, behind, left, right) is further complicated by the structure’s cylindrical profile. This makes modelling the corresponding gravity field a multi-solution problem, introducing significant uncertainty and greatly increasing involved computation efforts [59].
6. Radar Methods
Ground Penetrating Radar (GPR) directs radio pulse emissions at the tunnel intrados, which penetrate and partially backscatter off strong dielectric gradients in the subsurface associated with features of interest [60][61][62][63][64]. Pulsed Radar (PR) samples consecutively emit wideband waveforms to measure backscatter in the time domain. Step-Frequency Continuous Wave (SFCW) radar incrementally sweeps an emission sinusoid through a pre-defined frequency band; the Fourier Spectrum of the returning signal is directly ascertained in the frequency domain by frequency-wise inspection of return signal strength [65]. In RTI, systems fall under three categories:
-
Trolley-Mounted [66][67][68] —Units commonly feature interchangeable air-coupled antenna of differing frequencies to facilitate trade-off between penetration depth and output image resolution [17]. However, motorisation is infrequent, scans are unidirectional (typically railbed only) and offer no protection to operatives;
-
Handheld [69][70][71][72]—Compact ground-coupled scanners guided by hand can achieve real-time scanning of curved tunnel sidewalls and crown. Typically restricted by limited penetrative depth (d < 50 cm), coverage speed (under m2 h−1) and gantry requirement to reach high surfaces make units impractical for full RTI;
7. Robotic Methods
Robotic systems reduce necessary human involvement in RTI, thereby beneficially reducing human error during data acquisition (e.g., mis-recordings due to subjectivity or lapses in concentration). Scope for varying degrees of autonomy further reduces dependency on onsite human presence, thereby increasing crew safety and cutting overhead costs. However, robotic methods must be remembered and shared the limitations of their constituent sensors and also exhibit their own unique set of challenges (e.g., collision avoidance, recovery, stabilisation, power management, miniaturisation).
7.1. Unmanned Aerial Vehicles
Unmanned Aerial Vehicles (UAVs) have become increasingly popular for tunnel inspection owing to their low cost designs, programmability and exceptional manoeuvrability, which has motivated in excess of $4 billion global investment in UAV technology development for infrastructure inspection [78]. However, practical performance of current UAVs remains limited by poor onboard charge retention [79]; stabilisation challenges from near-wall turbulence and common dependency on GPS. Note that being subterranean, Global Positioning Systems (GPS) typically struggle to operate reliably in tunnels. [80][81]. Although, it was found that considerable recent research applying collision-aversion protocol [82][83] and ‘smart pathfinding’ [84][85][86] (e.g., PLUTO [87]) to develop autonomous UAVs [88][89][90][91]. However, backup pilots remain necessary which add costs and safety-risks [91]. Furthermore, no commercially available autonomous UAV has yet to be developed specifically for RTSSI, despite similar systems existing for hydroelectric penstock surface level inspection [92].
Being airborne, UAVs could quickly transport RTSSI sensors where articulated booms cannot reach, for instance UAV-SWIRL hovers inside vertical ventilation shafts [79][93]. However, most systems still favour Optical Photometry and LiDAR sensing [94][95][96], permitting only implicit subsurface measurements. Of novel importance, several significant exceptions were found developed since 2015. These include development of new UAV-mounted GPR prototypes [97][98][99]; it was found that one commercial system [100] is capable of 10 m penetration, however it is unclear if this incorporates UAV altitude.
In addition, hybrid locomotion UAVs now encompass:
-
Pivoting RTUs [105]—Tracks enable uninterrupted contact and continuous one-way surface coverage but increase weight and power drain, limiting survey completeness;
7.2. Adaptive Robots
Adaptive tunnel inspection robots was considered to be devices capable of automatic geometry, operation or locomotion mechanism modification that combats demanding environmental conditions. As developments found were primarily proof-of-concept prototypes, current systems lack direct applicability to RTSSI without significant refinement efforts.
Nonetheless, herein it shall consider how such systems could be of practical future benefit in RTSSI. Foremost, adaption permits infiltration of inaccessible survey areas (e.g., drainage pipe interiors, capped shafts), increasing survey coverage. Moreover, units can swiftly traverse complex terrain (e.g., steps, rail tracks, damaged surfaces, angled walls) without human interaction, inviting remote inspection innovation potential.
Reconfigurable UAVs [110][111] fold to pass though narrow channels before unfolding to survey unknown void-like environments, which could be applied to preliminary surveys of hidden shafts via small diameter drill holes in capping facades. However, with more moving parts, damage likelihood during transit or execution is increased, potentially trapping systems behind walls incurring excess repair, replacement or recovery costs. Self-disassembly [112] could provide an easier route towards recovery.
8. BIM-Integration
Building Information Modelling (BIM)represents a new paradigm for large structure lifecycle information management [113][114]. Current survey outputs represent one-way information exchanges between the physical tunnel environment and reconstructed digital models. By contrast, Digital Twin Tunnel (DTT) BIMs would facilitate two-way information exchange from any point in time during its perpetual update cycle. In two-way exchange, state changes in physical tunnel prompt reactive changes in the digital tunnel informing future maintenance, which cause further state changes in the physical tunnel and so on and so forth [115].
Multiple recent experimental rail tunnel-BIM studies were found exist [116][117][118][119][120], typically deploying laser methods to profile and categorise trackside assets but only [121] directly approaches RTSSI, developing a prototype AI-assisted BIM for ingress detection (developed on the Amber Inspection Could). Problematically, none currently exhibit adequate automation to be considered idealised DTTs. By inference, visualisation quality and overheads would clearly benefit from the significantly increased data pools and optimised network architectures anticipated [122]. However, challenges remain. Existing BIM architectures frequently lack specialisation to account for unique RTSSI challenges, such as complex terrain deformations and changeable subsurface geological conditions [120][123]. Reoccurring incompleteness of feeder data from NDI methods further limit BIM efficacy for RTSSI, despite recent improvements in multi-label datasets recovery [124][125][126][127].
Evidently, BIM integration for RTSSI will be essential for developing the first self-sustaining DTT [126], but insufficient without complimentary improvements to survey completeness.
9. Other Methods
Aforementioned NDI methods are most commonly deployed in routine RTSSI surveys based on encountered literature, motivating distinction from (i) more antiquated methods (e.g., invasive, inefficient, overly localised), (ii) less established experimental practices and (iii) schemes for real-time subsurface monitoring. In (i), these are grouped: Borehole/Drill Core Sampling [128][129], Electrical Resistivity Tomography (ERT) [130][131][132][133], Endoscopic Probing [134][135] and Schmidt Hammer Strength Testing [43][136]. In group (ii), these are gathered: Radiography/Muon Tomography [137][138] and multiple additional prototype robotic RTSSI systems [3][139][140][141][142][143]. Group (iii) accounts for Time Domain Reflectometry schemes [144][145] and other Embedded Sensors [146].
References
- Bahadori-Jahromi, A.; Rotimi, A.; Roxan, A. Sustainable conditional tunnel inspection: London underground, UK. Infrastruct. Asset Manag. 2018, 5, 22–31.
- Liu, S.; Wang, Q.; Luo, Y. A review of applications of visual inspection technology based on image processing in the railway industry. Transp. Saf. Environ. 2019, 1, 185–204.
- Stent, S.; Girerd, C.; Long, P.; Cipolla, R. A Low-Cost Robotic System for the Efficient Visual Inspection of Tunnels. In Proceedings of the International Symposium on Automation and Robotics in Construction, Oulu, Finland, 15–18 June 2015; IAARC Publications: Oulu, Finland, 2015; Volume 32. Available online: http://mi.eng.cam.ac.uk/~cipolla/archive/Publications/inproceedings/2015-ISARC-tunnel-inspection.pdf (accessed on 13 July 2021).
- Attard, L.; Debono, C.; Valentino, G.; Di Castro, M. Image Mosaicing of Tunnel Wall Images Using High Level Features. In Proceedings of the 10th International Symposium on Image and Signal Processing and Analysis, Ljubljana, Slovenia, 18–20 September 2017; pp. 141–146.
- Tannant, D. Review of photogrammetry-based techniques for characterization and hazard assessment of rock faces. Int. J. Georesour. Environ. IJGE 2015, 1, 76–87.
- Krisada, C.; Tae-Kyun, K.; Fabio, V.; Roberto, C.; Kenichi, S. Distortion-free image mosaicing for tunnel inspection based on robust cylindrical surface estimation through structure from motion. J. Comput. Civ. Eng. 2016, 30, 04015045.
- Jenkins, M.D.; Buggy, T.; Morison, G. An Imaging System for Visual Inspection and Structural Condition Monitoring of Railway Tunnels. In Proceedings of the 2017 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Milan, Italy, 24–25 July 2017; pp. 1–6.
- Xue, Y.; Zhang, S.; Zhou, M.; Zhu, H. Novel SfM-DLT method for metro tunnel 3D reconstruction and visualization. Undergr. Space 2021, 6, 134–141.
- Aleksieva, N.; Hermosilla Carrasco, C.; Brown, A.; Dean, R.; Carolin, A.; Täljsten, B.; García-Villena, F.; Morales-Gamiz, F. Inspection and Monitoring Techniques for Tunnels and Bridges; Technical Report, IN2TARCK2; Research into Enhanced Tracks, Switches and Structures: Málaga, Spain, 2019.
- Mccormick, N.; Kimkeran, S.; Najimi, A.; Jonas, D. Assessing the Condition of Railway Assets Using DIFCAM: Results from Tunnel Examinations. In Proceedings of the 6th IET Conference on Railway Condition Monitoring (RCM 2014), Birmingham, UK, 17–18 September 2014; pp. 1–6.
- Npl Management Limited. DIFCAM Evolution. Organisation Website. 2021. Available online: https://gtr.ukri.org/projects?ref=971711 (accessed on 13 July 2021).
- Xue, Y.; Zhang, S. A Fast Metro Tunnel Profile Measuring Method Based on Close-Range Photogrammetry. In Proceedings of the International Conference on Information Technology in Geo-Engineering, Guimaraes, Portugal, 29 September–2 October 2019; Springer: Cham, Switzerland, 2019; pp. 57–69.
- Leonidas, E.; Xu, Y. The Development of an Automatic Inspection System Used for the Maintenance of Rail Tunnels. In Proceedings of the 2018 24th International Conference on Automation and Computing (ICAC), Newcastle Upon Tyne, UK, 6–7 September 2018; pp. 1–6.
- IOWA State University. The Speed of Sound in Other Materials. Organisation Website. 2021. Available online: https://www.ndeed.org/Physics/Sound/speedinmaterials.xhtml (accessed on 15 June 2021).
- TWI Ltd. What Is Ultrasonic Testing and How Does It Work? Organisation Website. 2021. Available online: https://www.twiglobal.com/technical-knowledge/faqs/ultrasonic-testing (accessed on 17 June 2021).
- Whitlow, R.; Haskins, R.; Mccomas, S.; Crane, C.; Howard, I.; Mckenna, M. Remote bridge monitoring using infrasound. J. Bridge Eng. 2019, 24, 04019023.
- White, J.; Wieghaus, K.; Karthik, M.; Shokouhi, P.; Hurlebaus, S.; Wimsatt, A. Nondestructive testing methods for underwater tunnel linings: Practical application at Chesapeake channel tunnels. J. Infrastruct. Syst. 2017, 23, B4016011.
- Menendez, E.; Victores, J.; Montero, R.; Martínez, S.; Balaguer, C. Tunnel structural inspection and assessment using an autonomous robotic system. Autom. Constr. 2018, 87, 117–126.
- Protopapadakis, E.; Stentoumis, C.; Doulamis, N.; Doulamis, A.; Loupos, K.; Makantasis, K.; Kopsiaftis, G.; Amditis, A. Autonomous robotic inspection in tunnels. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 5, 167–174.
- ROBO-SPECT. Robotic System with Intelligent Vision and Control for Tunnel Structural Inspection and Evaluation. Organisation Website. 2021. Available online: http://www.robo-spect.eu/index.php/project (accessed on 18 July 2021).
- Watanabe, A.; Even, J.; Morales, L.; Ishi, C. Robot-Assisted Acoustic Inspection of Infrastructures—Cooperative Hammer Sounding Inspection. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5942–5947.
- Jamshidi, A.; Faghih Roohi, S.; Núñez, A.; Babuska, R.; De Schutter, B.; Dollevoet, R.; Li, Z. Probabilistic defect-based risk assessment approach for rail failures in railway infrastructure. IFAC-PapersOnLine 2016, 49, 73–77.
- Fujii, H.; Yamashita, A.; Asama, H. Defect Detection with Estimation of Material Condition Using Ensemble Learning for Hammering Test. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3847–3854.
- Louhi Kasahara, J.Y.; Yamashita, A.; Asama, H. Acoustic inspection of concrete structures using active weak supervision and visual information. Sensors 2020, 20, 629.
- Nakamura, S.; Yamashita, A.; Inoue, F.; Inoue, D.; Takahashi, Y.; Kamimura, N.; Ueno, T. Inspection test of a tunnel with an inspection vehicle for tunnel lining concrete. J. Robot. Mechatron. 2019, 31, 762–771.
- Moreu, F.; Ayorinde, E.; Mason, J.; Farrar, C.; Mascarenas, D. Remote railroad bridge structural tap testing using aerial robots. Int. J. Intell. Robot. Appl. 2018, 2, 67–80.
- Lattanzi, D.; Miller, G. Review of robotic infrastructure inspection systems. J. Infrastruct. Syst. 2017, 23, 1–15.
- Sugimoto, T.; Sugimoto, K.; Uechi, I.; Utagawa, N.; Kuroda, C. Efficiency Improvement of Outer Wall Inspection by Noncontact Acoustic Inspection Method Using Sound Source Mounted Type UAV. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; pp. 2091–2094.
- Arastounia, M. Automated as-built model generation of subway tunnels from mobile LIDAR data. Sensors 2016, 16, 1486.
- Soilán, M.; Sánchez-rodríguez, A.; Del Río-barral, P.; Perez-Collazo, C.; Arias, P.; Riveiro, B. Review of laser scanning technologies and their applications for road and railway infrastructure monitoring. Infrastructures 2019, 4, 58.
- Fröhlich, Z. Z+F profiler®6007 Duo. Online Document. 2014. Available online: https://www.zf-laser.com/fileadmin/editor/Broschueren/Broschuere_PROFILER_6007_duo_E_compr.pdf (accessed on 16 July 2021).
- Cui, H.; Ren, X.; Mao, Q.; Hu, Q.; Wang, W. Shield Subway Tunnel Deformation Detection Based on Mobile Laser Scanning. Autom. Constr. 2019, 106, 102889.
- Gézero, L.; Antunes, C. Automated three-dimensional linear elements extraction from mobile LIDAR point clouds in railway environments. Infrastructures 2019, 4, 46.
- Kemp, D. 3D Crossrail Tunnel Scan Unwrapped into 2D for First Time. Online Document. 2016. Available online: https://www.constructionnews.co.uk/tech/3d-crossrailtunnel-scan-unwrapped-into-2d-for-first-time-03-08-2016/#Tunnel_slice (accessed on 19 July 2021).
- Sun, H.; Xu, Z.; Yao, L.; Zhong, R.; Du, L.; Wu, H. Tunnel monitoring and measuring system using mobile laser scanning: Design and deployment. Remote Sens. 2020, 12, 730.
- Tan, K.; Cheng, X.; Ju, Q. Combining mobile terrestrial laser scanning geometric and radiometric data to eliminate accessories in circular metro tunnels. J. Appl. Remote Sens. 2016, 10, 030503.
- Mccrory, K. Case Study of Llandudno Junction Station Survey. Online Document. 2020. Available online: https://scantechinternational.com/case_study/llandudno-junction-station (accessed on 16 July 2021).
- Scantech International Ltd. Railway Surveys. Organisation Website. 2021. Available online: https://scantechinternational.com/sectors/railway-surveys (accessed on 24 July 2021).
- Cheng, X.; Hu, X.; Tan, K.; Wang, L.; Yang, L. Automatic detection of shield tunnel leakages based on terrestrial mobile LIDAR intensity images using deep learning. IEEE Access 2021, 9, 55300–55310.
- Fröhlich, Z. Case Study: Train Mounted Laser Survey of Birmingham New Street Area Resignalling Phase 7. Online Document. 2016. Available online: https://www.zf-laser.com/fileadmin/editor/Case_studies/Case_Study_omnicom_E_comp.pdf (accessed on 16 July 2021).
- Heinz, E.; Mettenleiter, M.; Kuhlmann, H.; Holst, C. Strategy for determining the stochastic distance characteristics of the 2D laser scanner Z+F Profiler 9012a with special focus on the close range. Sensors 2018, 18, 2253.
- Farahani, B.; Barros, F.; Sousa, P.; Cacciari, P.; Tavares, P.; Futai, M.; Moreira, P. A coupled 3D laser scanning and digital image correlation system for geometry acquisition and deformation monitoring of a railway tunnel. Tunn. Undergr. Space Technol. 2019, 91, 102995.
- Yamazaki, F.; Ueda, H.; Liu, W. Basic study on detection of deteriorated RC structures using infrared thermography camera. Eng. J. 2018, 22, 233–242.
- Farahani, B. Innovative Methodology for Railway Tunnel Inspection. Ph.D. Thesis, Faculty of Engineering, University of Porto, Porto, Portugal, 2019. Available online: https://www.researchgate.net/publication/336406410_Innovative_Methodology_for_Railway_Tunnel_Inspection (accessed on 12 July 2021).
- Ishikawa, M.; Koyama, M.; Kasano, H.; Ogasawara, N.; Yamada, Y.; Hatta, H.; Fukui, R.; Nishitani, Y.; Utsunomiya, S. Inspection of Concrete Structures Using the Active Thermography Method with Remote Heating Apparatuses. In Proceedings of the 15th Asia Pacific Conference for Non-Destructive Testing (APCNDT2017), Singapore, 13–17 November 2017.
- Lu, X.; Tian, G.; Wu, J.; Gao, B.; Tian, P. Pulsed air-flow thermography for natural crack detection and evaluation. IEEE Sens. J. 2020, 20, 8091–8097.
- Liu, Z.; Gao, B.; Tian, G. Natural crack diagnosis system based on novel l-shaped electromagnetic sensing thermography. IEEE Trans. Ind. Electron. 2020, 67, 9703–9714.
- Konishi, S.; Kawakami, K.; Taguchi, M. Inspection method with infrared thermometry for detect void in subway tunnel lining. Procedia Eng. 2016, 165, 474–483.
- Afshani, A.; Akagi, H. Investigate the Detection Rate of Defects in Concrete Lining Using Infrared-Thermography Method. In Proceedings of the 7th Japan-China Geotechnical Symposium, Sanya, China, 16–18 March 2018; pp. 1005–1016. Available online: https://www.researchgate.net/publication/324890164_Investigate_the_detection_rate_of_defects_in_concrete_lining_using_infrared-thermography_method (accessed on 14 July 2021).
- Olmi, R.; Palombi, L.; Durazzani, S.; Poggi, D.; Renzoni, N.; Costantino, F.; Durazzani, S.; Frilli, G.; Raimondi, V. Integrating thermographic images in a user-friendly platform to support inspection of railway bridges. Proceedings 2019, 27, 12.
- Liu, F.; Seipel, S. Infrared-visible image registration for augmented reality-based thermographic building diagnostics. Vis. Eng. 2015, 3, 16.
- Afshani, A.; Kawakami, K.; Konishi, S.; Akagi, H. Study of infrared thermal application for detecting defects within tunnel lining. Tunn. Undergr. Space Technol. 2019, 86, 186–197.
- Scintrex. CG-3/3M Autograv Automated Gravity Meter Operator Manual, 5th ed.; Scintrex: Vaughan, ON, Canada, 1995; Available online: https://scintrexltd.com/support/product-manuals/cg3-manual/ (accessed on 27 November 2021).
- Butler, D. Detection and Characterization of Cavities, Tunnels, and Abandoned Mines. Online Document. 2008. Available online: https://digital.lib.usf.edu//content/SF/S0/05/54/94/00001/K26-05045-Butler--ICEEG_Presentation_on_Cavities_and_Tunnels.pdf (accessed on 14 November 2020).
- Fores, B.; Champollion, C.; Lesparre, N.; Pasquet, S.; Martin, A.; Nguyen, F. Variability of the water stock dynamics in karst: Insights from surface-to-tunnel geophysics. Hydrogeol. J. 2021, 29, 2077–2089.
- Blecha, V.; Mašín, D. Observed and calculated gravity anomalies above a tunnel driven in clays–implication for errors in gravity interpretation. Near Surf. Geophys. 2013, 11, 569–578.
- Zahorec, P.; Papčo, J.; Vajda, P.; Szabó, S. High-precision local gravity survey along planned motorway tunnel in the Slovak karst. Contrib. Geophys. Geod. 2019, 49, 207–227.
- Bloedau, E. Assessment of Change to Gravity Field due to Underground Railroad Tunnel Construction. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2021. Available online: https://elib.uni-stuttgart.de/handle/11682/11296 (accessed on 14 June 2021).
- Han, R.; Li, W.; Cheng, R.; Wang, F.; Zhang, Y. 3D high-precision tunnel gravity exploration theory and its application for concealed inclined high-density ore deposits. J. Appl. Geophys. 2020, 180, 104119.
- Montero, R.; Victores, J.; Martinez, S.; Jardón, A.; Balaguer, C. Past, present and future of robotic tunnel inspection. Autom. Constr. 2015, 59, 99–112.
- Alani, A.; Tosti, F. GPR Applications in Structural Detailing of a Major Tunnel Using Different Frequency Antenna Systems. Constr. Build. Mater. 2018, 158, 1111–1122.
- Lai, W.; Derobert, X.; Annan, P. A review of ground penetrating radar application in civil engineering: A 30-year journey from locating and testing to imaging and diagnosis. NDTE Int. 2018, 96, 58–78.
- Sensors & Software. What Is Ground Penetrating Radar (GPR)? Online Document. 2020. Available online: https://www.sensoft.ca/blog/what-is-gpr/ (accessed on 17 November 2020).
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672.
- Shrestha, S.; Arai, I. Signal processing of ground penetrating radar using spectral estimation techniques to estimate the position of buried targets. EURASIP J. Adv. Signal Process. 2003, 2003, 970543.
- Anbazhagan, P.; Dixit, P.; Bharatha, T. Identification of type and degree of railway ballast fouling using ground coupled GPR antennas. J. Appl. Geophys. 2016, 126, 183–190.
- Cafiso, S.; Capace, B.; D’Agostino, C.; Delfino, E.; Di Graziano, A. Application of NDT to Railway Track Inspections. In Proceedings of the 3rd International Conference on Traffic and Transport Engineering (ICTTE), Lucerne, Switzerland, 6–10 July 2016.
- Ciampoli, L.; Calvi, A.; D’Amico, F. Railway ballast monitoring by GPR: A test-site investigation. Remote Sens. 2019, 11, 2381.
- Proceq. Proceq GPR Live. Proceq, Screening Eagle Technologies AG Ringstrasse 28603 Schwerzenbach Zürich Switzerland. 2017. Available online: https://www.screeningeagle.com/en/product-family/proceq-ground-penetrating-radars (accessed on 3 October 2020).
- GSSI. StructureScan Mini XT. Online Document. 2017. Available online: https://www.geophysical.com/wp-content/uploads/2018/01/GSSI-StructureScanMiniXTBrochure.pdf (accessed on 21 July 2021).
- Proceq. Portable Ground Penetrating Radar—Proceq GP8000. Organisation Website. 2021. Available online: https://www.screeningeagle.com/en/products/proceq-gp8000-portable-concrete-gpr-radar (accessed on 12 June 2021).
- Dawood, T.; Zhu, Z.; Zayed, T. Deterioration mapping in subway infrastructure using sensory data of GPR. Tunn. Undergr. Space Technol. 2020, 103, 103487.
- 3D-RADAR. GEOSCOPE MK IV: High-Speed 3D GPR with High-Resolution and Deep Penetration. Online Document. 2019. Available online: http://3d-radar.com/wp-content/uploads/2019/10/3DRadar_GeoScope_ProductSheet_2019.pdf (accessed on 18 June 2021).
- Zetica Rail. Zetica—Advanced Rail Radar (ZARR) Solution to Augment Inspection Trains. Organisation Website. 2021. Available online: https://zeticarail.com/systems-software/zarr/ (accessed on 4 July 2021).
- IDS GeoRadar. SRS SafeRailSystem: Safe Railway Ballast Inspections with Ground Penetrating Radar. Organisation Website. 2021. Available online: https://idsgeoradar.com/products/ground-penetratingradar/srs-saferailsystem (accessed on 4 July 2021).
- Zan, Y.; Li, Z.; Su, G.; Zhang, X. An innovative vehicle-mounted GPR technique for fast and efficient monitoring of tunnel lining structural conditions. Case Stud. Nondestruct. Test. Eval. 2016, 6, 63–69.
- Xiong, H.; Su, G.; Zhang, C.; Li, B.; Wei, W. A train-mounted GPR System for Operating Railway Tunnel Inspection. In Advances in Transdisciplinary Engineering Series. In Proceedings of the ISMR 2020 7th International Symposium on Innovation & Sustainability of Modern Railway, Nanchang, China, 23–25 October 2020; Volume 14. Available online: https://ebooks.iospress.nl/volume/ismr-2020-proceedings-of-the-7th-international-symposium-on-innovation-amp-sustainability-of-modern-railway (accessed on 7 July 2020).
- ESCAP. Inspection and Monitoring of Railway Infrastructure Using Aerial Drones. Online Document. 2019. Available online: https://www.unescap.org/sites/default/files/TARWG_4E_Inspectionandmonitoring.pdf (accessed on 1 July 2021).
- Tan, C.H.; Shaiful, D.S.B.; Ang, W.J.; Win, S.K.H.; Foong, S. Design optimization of sparse sensing array for extended aerial robot navigation in deep hazardous tunnels. IEEE Robot. Autom. Lett. 2019, 4, 862–869.
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164.
- Galtarossa, L.; Navilli, L.; Chiaberge, M. Visual-Inertial Indoor Navigation Systems and Algorithms for UAV Inspection Vehicles. In Industrial Robotics; IntechOpen: London, UK, 2020; pp. 1–16.
- Azevedo, F.; Oliveira, A.; Dias, A.; Almeida, J.; Moreira, M.; Santos, T.; Ferreira, A.; Martins, A.; Silva, E. Collision Avoidance for Safe Structure Inspection with Multirotor UAV. In Proceedings of the 2017 European Conference on Mobile Robots (ECMR), Paris, France, 6–8 September 2017; pp. 1–7.
- Quan, Q.; Fu, R.; Li, M.; Wei, D.; Gao, Y.; Cai, K. Practical distributed control for VTOL UAVs to pass a tunnel. arXiv 2021, arXiv:2101.07578.
- Petrlík, M.; Báča, T.; Heřt, D.; Vrba, M.; Krajník, T.; Saska, M. A robust UAV system for operations in a constrained environment. IEEE Robot. Autom. Lett. 2020, 5, 2169–2176.
- Moletta, M. Path Planning for Autonomous Aerial Robots in Unknown Underground Zones Optimized for Vertical Tunnels Exploration. Master’s Thesis, KTH Royal Institute of Technology in Stockholm, School of Electrical Engineering and Computer Science (EECS), Stockholm, Sweden, 2020. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2:1499089&dswid=5052 (accessed on 18 March 2021).
- Elmokadem, T.; Savkin, A. A method for autonomous collision-free navigation of a quadrotor UAV in unknown tunnel-like environments. Robotica 2021, 40, 1–27.
- Falcone, A.; Vaccarino, G. Primary Level UAV for Tunnel Inspection: The PLUTO Project. SEMANTIC SCHOLAR. 2020. Available online: https://www.semanticscholar.org/paper/Primary-Level-UAVfor-Tunnel-Inspection:-the-PLUTO-Falcone-Vaccarino/32a694d6dbe4f7dba61181c54d8681fbe7503245 (accessed on 18 July 2020).
- Özaslan, T.; Shen, S.; Mulgaonkar, Y.; Michael, N.; Kumar, V. Inspection of Penstocks and Featureless Tunnel-Like Environments Using Micro UAVs. In Field and Service Robotics: Results of the 9th International Conference; Mejias, L., Corke, P., Roberts, J., Eds.; Springer Tracts in Advanced Robotics Book Series; Springer International Publishing: Cham, Switzerland, 2015; Volume 105, pp. 123–136.
- Sakuma, M.; Kobayashi, Y.; Emaru, T.; Ravankar, A. Mapping of Pier Substructure Using UAV. In Proceedings of the 2016 IEEE/SICE International Symposium on System Integration (SII), Sapporo, Japan, 13–15 December 2016; pp. 361–366.
- Wu, W.; Qurishee, M.; Owino, J.; Fomunung, I.; Onyango, M.; Atolagbe, B. Coupling Deep Learning and UAV for Infrastructure Condition Assessment Automation. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; pp. 1–7.
- Dorafshan, S.; Maguire, M.; Hoffer, N.; Coopmans, C. Challenges in Bridge Inspection Using Small Unmanned Aerial Systems: Results and Lessons Learned. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1722–1730.
- Hovering Solutions Ltd. Case Studies: Penstock Inspections and Mapping by Using Autonomous Flying Robots. Organisation Website. 2020. Available online: http://www.hoveringsolutions.com/aboutus/penstocks-mapping (accessed on 19 April 2021).
- Tan, C.; Ng, M.; Shaiful, D.; Win, S.; Ang, W.; Yeung, S.; Lim, H.; Do, M.; Foong, S. A smart unmanned aerial vehicle (UAV) based imaging system for inspection of deep hazardous tunnels. Water Pract. Technol. 2018, 13, 991–1000.
- Hovering Solutions Ltd. Case Studies: London Crossrail Tunnels Are Scanned Using Drones. Organisation Website. 2017. Available online: http://www.hoveringsolutions.com/about-us/crossrailtunnels-3d-mapping-using-drones (accessed on 19 April 2021).
- Pahwa, R.; Chan, K.; Bai, J.; Saputra, V.; Do, M.; Foong, S. Dense 3D Reconstruction for Visual Tunnel Inspection Using Unmanned Aerial Vehicle. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 7025–7032.
- Cwiakala, P.; Gruszczynski, W.; Stoch, T.; Puniach, E.; Mrochen, D.; Matwij, W.; Matwij, K.; Nedzka, M.; Sopata, P.; Wojcik, A. UAV applications for determination of land deformations caused by underground mining. Remote Sens. 2020, 12, 1733.
- Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Gonzalez-Valdes, B.; Arboleya-Arboleya, A.; Rodriguez-Vaqueiro, Y.; Heras, F.L.; Pino, A. UAV-Mounted GPR for NDT Applications. In Proceedings of the 2018 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; pp. 2–5.
- Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Heras, F.L.; Gonzalez-Valdes, B.; Rodriguez-Vaqueiro, Y.; Pino, A.; Arboleya-Arboleya, A. GPR System Onboard a UAV for Non-Invasive Detection of Buried Objects. In Proceedings of the 2018 IEEE International Symposium on Antennas and Propagation USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018; pp. 1967–1968.
- Lamsters, K.; Karušs, J.; Krievāns, M.; Ješkins, J. High-resolution surface and bed topography mapping of Russell Glacier (SW Greenland) using UAV and GPR. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 2, 757–763.
- MALA. MALA Geodrone 80 Technical Specification. GUIDELINEGEO, Hemvarnsgatan 9SE-171 54 Solna, StockholmVAT: SE 556606-1155-01. 2021. Available online: https://wwwguidelinegeoc.cdn.triggerfish.cloud/uploads/2020/01/MALA-GeoDrone-80-Technical-Specification-2020-04-27.pdf (accessed on 2 December 2021).
- Delamare, Q. Algorithms for Estimation and Control of Quadrotors in Physical Interaction with Their Environment. Ph.D. Thesis, University Rennes, Rennes, France, 2019. Available online: https://tel.archives-ouvertes.fr/tel-02410023 (accessed on 18 July 2021).
- Delamare, Q.; Giordano, P.; Franchi, A. Toward aerial physical locomotion: The contact-fly-contact problem. IEEE Robot. Autom. Lett. 2018, 3, 1514–1521.
- Sanchez-Cuevas, P.; Ramon-Soria, P.; Arrue, B.; Ollero, A.; Heredia, G. Robotic system for inspection by contact of bridge beams using UAVs. Sensors 2019, 19, 305.
- Kocer, B.; Tjahjowidodo, T.; Pratama, M.; Seet, G. Inspection-while-flying: An autonomous contact-based nondestructive test using UAV-tools. Autom. Constr. 2019, 106, 102895.
- Iwamoto, T.; Enaka, T.; Tada, K. Development of testing machine for tunnel inspection using multi-rotor UAV. J. Phys. Conf. Ser. 2017, 842, 012068.
- PRODRONE Co., Ltd. PD6-CI-L. Organisation Website. 2021. Available online: https://www.prodrone.com/products/pd6-ci-l/ (accessed on 19 July 2021).
- Mahmood, S.; Bakhy, S.; Tawfik, M. Propeller-Type Wall-Climbing Robots: A Review. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1094, 012106.
- Ikeda, T.; Yasui, S.; Fujihara, M.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Wall Contact by Octo-rotor UAV with one DoF Manipulator for Bridge Inspection. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5122–5127.
- Jiang, G.; Voyles, R.; Choi, J. Precision Fully-Actuated UAV for Visual and Physical Inspection of Structures for Nuclear Decommissioning and Search and Rescue. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, , 6–8 August 2018; pp. 1–7.
- Mosaddek, A.; Kommula, H.; Gonzalez, F. Design and Testing of a Recycled 3D Printed and Foldable Unmanned Aerial Vehicle for Remote Sensing. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1207–1216.
- Brown, L.; Clarke, R.; Akbari, A.; Bhandari, U.; Bernardini, S.; Chhabra, P.; Marjanovic, O.; Richardson, T.; Watson, S. The design of Prometheus: A reconfigurable UAV for subterranean mine inspection. Robotics 2020, 9, 95.
- Ecker, G.; Zagar, B.; Schwab, C.; Saliger, F.; Schachinger, T.; Stur, M. Conceptualising an Inspection Robot for Tunnel Drainage Pipes. IOP Conf. Ser. Mater. Sci. Eng. 2020, 831, 12016.
- NBS Enterprises Ltd. What Is Building Information Modelling (BIM)? Organisation Website. 2021. Available online: https://www.thenbs.com/knowledge/what-is-buildinginformation-modelling-bim (accessed on 12 July 2021).
- Kupriyanovsky, V.; Pokusaev, O.; Klimov, A.; Volodin, A. BIM on the way to IFC5-alignment and development of IFC semantics and ontologies with UML and OWL for road and rail structures, bridges, tunnels, ports, and waterways. Int. J. Open Inf. Technol. 2020, 8, 69–78.
- Soilán, M.; Nóvoa, A.; Sánchez-Rodríguez, A.; Riveiro, B.; Arias, P. Semantic segmentation of point clouds with PointNet and KPConv architectures applied to railway tunnels. ISPRS Ann. Photogrammetry. Remote Sens. Spat. Inf. Sci. 2020, V-2-2020, 281–288.
- Nuttens, T.; De Breuck, V.; Cattoor, R.; Decock, K.; Hemeryck, I. Using BIM models for the design of large rail infrastructure projects: Key factors for a successful implementation. Int. J. Sustain. Dev. Plan. 2018, 13, 77–89.
- ERA LEARN: Eurostars 2. Project: Operation Oriented Tunnel Inspection System. Organisation Website. 2018. Available online: https://www.era-learn.eu/networkinformation/networks/eurostars-2/eurostars-cut2013off-9/operation-oriented-tunnel-inspection-system (accessed on 17 July 2021).
- Sorge, R.; Buttafoco, D.; Debenedetti, J.; Menozzi a Cimino, G.; Maltese, F.; Tiberi, B. BIM Implementation—Brenner Base Tunnel Project. In Tunnels and Underground Cities: Engineering and Innovation Meet Archaeology, Architecture and Art; CRC Press: Boca Raton, FL, USA, 2019; pp. 3122–3131. Available online: https://www.researchgate.net/publication/332517232_BIM_implementation_-_Brenner_Base_Tunnel_project (accessed on 17 July 2021).
- Cheng, Y.; Qiu, W.; Duan, D. Automatic creation of as-is building information model from single-track railway tunnel point clouds. Autom. Constr. 2019, 106, 102911.
- Tijs, K. Digital Tunnel Twin: Enriching the Maintenance and Operation of Dutch Tunnels. Master’s Thesis, Delft University of Technology, Civil Engineering, Construction Management and Engineering, Delft, The Netherlands, 2020. Available online: http://resolver.tudelft.nl/uuid:9cbf5ecf-66ce-4dde-9306-16bd8ccfdb9d (accessed on 1 July 2021).
- Schneider, O.; Prokopová, A.; Modetta, F.; Petschen, V. The Use of Artificial Intelligence for a Cost-Effective Tunnel Maintenance. In Tunnels and Underground Cities: Engineering and Innovation Meet Archaeology; CRC Press: Boca Raton, FL, USA, 2019; pp. 3050–3059. Available online: https://hagerbach.ch/fileadmin/user_upload/ch323_OliverSchneider.pdf (accessed on 23 July 2021).
- Kapogiannis, G.; Mlilo, A. Digital Construction Strategies and BIM in Railway Tunnelling Engineering. In Tunnel Engineering-Selected Topics; IntechOpen: London, UK, 2019; Available online: https://www.intechopen.com/chapters/68102 (accessed on 25 November 2021).
- Song, Z.; Shi, G.; Wang, J.; Wei, H.; Wang, T.; Zhou, G. Research on management and application of tunnel engineering based on BIM technology. J. Civ. Eng. Manag. 2019, 25, 785–797.
- Monica, R.; Aleotti, J.; Zillich, M.; Vincze, M. Multi-Label Point Cloud Annotation by Selection of Sparse Control Points. In Proceedings of the 2017 International Conference on 3D Vision (3DV), Qingdao, China, 10-12 October 2017; pp. 301–308.
- Xu, C.; Wu, B.; Wang, Z.; Zhan, W.; Vajda, P.; Keutzer, K.; Tomizuka, M. Squeezesegv3: Spatially-Adaptive Convolution for Efficient Point-Cloud Segmentation. In Proceedings of the European Conference on Computer Vision, Virtual, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–19.
- Kaewunruen, S.; Peng, S.; Phil-Ebosie, O. Digital twin aided sustainability and vulnerability audit for subway stations. Sustainability 2020, 12, 7873.
- Singh, V.; Willcox, K. Engineering design with digital thread. AIAA J. 2018, 56, 4515–4528.
- Shi, P.; Zhang, D.; Pan, J.; Liu, W. Geological investigation and tunnel excavation aspects of the weakness zones of Xiang’an subsea tunnels in China. Rock Mech. Rock Eng. 2016, 49, 4853–4867.
- Zhou, S.; Tian, Z.; Di, H.; Guo, P.; Fu, L. Investigation of a loess-mudstone landslide and the induced structural damage in a high-speed railway tunnel. Bull. Eng. Geol. Environ. 2020, 79, 2201–2212.
- Ghezzi, A.; Schettino, A.; Pierantoni, P.P.; Conyers, L.; Tassi, L.; Vigliotti, L.; Schettino, E.; Melfi, M.; Gorrini, M.; Boila, P. Reconstruction of a segment of the UNESCO world heritage hadrian villa tunnel network by integrated GPR, magnetic–paleomagnetic, and electric resistivity prospections. Remote Sens. 2019, 11, 1739.
- Moghaddam, S.; Azadi, A.; Sadeghi, E. Detection of Landslide Geometry Using ERT, a Case Study: The Tunnel of Kermanshah-Khosravy Railway. In Proceedings of the 19th Iranian Geophysical Conference, Online, 9–16 November 2020; Iranian National Geophysical Society: Tehran, Iran, 2020; pp. 68–71. Available online: http://www.nigsconference.ir/article_4094.pdf (accessed on 30 November 2021).
- ABEM. User Manual Terrameter LS 2. Guideline Geo Abem Mala, Abem Instrument AB, Löfströms Allé 6A, S-172 66 Sundbyberg, Sweden. 2017. Available online: https://wwwguidelinegeoc.cdn.triggerfish.cloud/uploads/2017/08/Terrameter-LS-2-User-Manual-2017-08-14-1.pdf (accessed on 3 December 2021).
- Lataste, J.; Bruneau, J. Geophysical Investigations of a Landslide to Interpret the Distortion of a Railway Tunnel. In Proceedings of the NSG2021 27th European Meeting of Environmental and Engineering Geophysics, Bordeaux, France, 29 August–2 September 2021; EarthDoc: Bunnik, The Netherlands; Volume 2021, pp. 1–5.
- Rhayma, N.; Talon, A.; Breul, P.; Goirand, P. Mechanical investigation of tunnels: Risk analysis and notation system. Struct. Infrastruct. Eng. 2016, 12, 381–393.
- Zhou, Y.; Zhang, X.; Wei, L.; Liu, S.; Zhang, B.; Zhou, C. Experimental study on prevention of calcium carbonate crystallizing in drainage pipe of tunnel engineering. Adv. Civ. Eng. 2018, 2018, 9430517. Available online: https://www.hindawi.com/journals/ace/2018/9430517/ (accessed on 25 July 2021).
- Futai, M.; Cacciari, P.; Monticeli, J.; Cantarella, V. Study of an Old Railway Rock Tunnel: Site Investigation, Laboratory Tests, Weathering Effects and Computational Analysis. In Proceedings of the 19th International Conference on Soil Mechanics and Geotechnical Engineering, Seoul, Korea, 17–21 September 2017; ISSMGE, COEX Convention Centre: Seoul, Korea, 2021. Available online: https://www.issmge.org/publications/publication/study-ofan-old-railway-rock-tunnel-site-investigation-laboratorytests-weathering-effects-and-computational-analysis (accessed on 25 July 2021).
- Thompson, L.; Stowell, J.; Fargher, S.; Steer, C.; Loughney, K.; O’sullivan, E.; Gluyas, J.; Blaney, S.; Pidcock, R. Muon tomography for railway tunnel imaging. Phys. Rev. Res. 2020, 2, 023017.
- Han, R.; Yu, Q.; Li, Z.; Li, J.; Cheng, Y.; Liao, B.; Jiang, L.; Ni, S.; Yi, Z.; Liu, T.; et al. Cosmic muon flux measurement and tunnel overburden structure imaging. J. Instrum. 2020, 15, P06019.
- Zou, M.; Bai, H.; Wang, Y.; Yu, S. Mechanical design of a self-adaptive transformable tracked robot for cable tunnel inspection. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1096–1100.
- Di Castro, M.; Tambutti, M.L.B.; Ferre, M.; Losito, R.; Lunghi, G.; Masi, A. I-TIM: A robotic System for Safety, Measurements, Inspection and Maintenance in Harsh Environments. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6.
- Shi, C.; Che, H.; Hu, H.; Wang, W.; Xu, X.; Li, J. Research on Laser Positioning System of a Underground Inspection Robot Based on Signal Reflection Principle. In Proceedings of the 2019 3rd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 1–3 June 2019; pp. 58–62.
- Vithanage, R.; Harrison, C.; Desilva, A. Importance and applications of robotic and autonomous systems (RAS) in railway maintenance sector: A review. Computers 2019, 8, 56.
- Lincseek2021. Rail-Mounted Robot. Organisation Website. 2021. Available online: http://en.launchdigital.net/product.aspx?t=25 (accessed on 2 July 2021).
- Ziegler, M.; Loew, S. Investigations in the New TBM-Excavated Belchen Highway Tunnel. In Program, Design and Installations (Part 1); Techreport, ETH Zürich: Zürich, Switzerland, 2017; Available online: https://www.researchgate.net/publication/333653106_Investigations_in_the_new_TBM-excavated_Belchen_highway_tunnel_-_Program_design_and_installations_Part_1 (accessed on 25 November 2021).
- Zhang, T.; Shi, B.; Zhang, C.; Xie, T.; Yin, J.; Li, J. Tunnel Disturbance Events Monitoring and Recognition with Distributed Acoustic Sensing (DAS). In Proceedings of the 11th Conference of Asian Rock Mechanics Society, Asian Rock Mechanics Society, School of Earth Sciences and Engineering, Nanjing University, Beijing, China, 21–25 October 2021; IOP Publishing: Nanjing, China, 2021; Volume 861, p. 042034.
- Lienhart, W.; Buchmayer, F.; Klug, F.; Monsberger, C. Distributed Fibre-Optic Sensing Applications at the Semmering Base Tunnel, Austria. In Institution of Civil Engineers–Smart Infrastructure and Construction; Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology: Graz, Austria; ICE Publishing: London, UK, 2020; Volume 172, pp. 148–159.
More
Information
Subjects:
Transportation Science & Technology
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
2.0K
Entry Collection:
Remote Sensing Data Fusion
Revisions:
3 times
(View History)
Update Date:
22 Nov 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No