 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Chang Yuan | + 4755 word(s) | 4755 | 2021-05-08 08:48:12 | | | |
| 2 | Vivi Li | Meta information modification | 4755 | 2021-05-10 03:31:58 | | |
Video Upload Options
By moving a commercial 2D LiDAR, 3D maps of the environment can be built, based on the data of a 2D LiDAR and its movements. Compared to a commercial 3D LiDAR, a moving 2D LiDAR is more economical. A series of problems need to be solved in order for a moving 2D LiDAR to perform better, among them, improving accuracy and real-time performance. In order to solve these problems, estimating the movements of a 2D LiDAR, and identifying and removing moving objects in the environment, are issues that should be studied.
1. Introduction
Three-dimensional (3D) laser scanning technology, an advanced surveying and mapping method, has obvious advantages compared to traditional techniques. It combines high efficiency with data quality and accuracy. As the core sensor of 3D laser scanning technology, 3D LiDAR is widely used in many applications, such as terrain survey [1], architectural surveying and mapping [2], automatic driving [3], forest monitoring [4], and plant analysis [5].
However, for the moment, 3D LiDAR is generally expensive and is not consumer-grade yet. In comparison, 2D LiDAR is much more economical, and some 2D LiDARs are already consumer-grade [6]. As two major categories of commercial LiDAR, the differences between 2D LiDAR and 3D LiDAR are as follows: a 2D LiDAR is more economical than a 3D LiDAR, but it obtains less information, and it can only build 2D maps of the environment. On the other hand, a 3D LiDAR can build 3D maps of the environment; however, it is far more expensive than 2D LiDAR. Figure 1 shows a comparison of the maps built by a 2D LiDAR and a 3D LiDAR, respectively. We investigated some commonly used commercial 2D LiDARs and 3D LiDARs; their manufacturers, models, performances, prices, and application fields are listed in Table A1 of Appendix A to provide readers with a more detailed understanding of them.
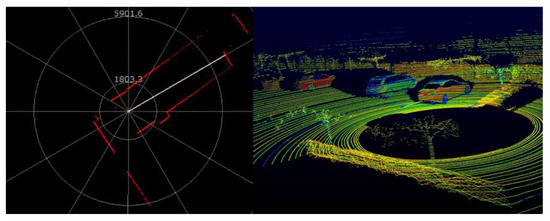
Figure 1. Left: map built by 2D LiDAR Slamtec RPLIDAR A1 [6]. Right: map built by 3D LiDAR Velodyne HDL-64E [7].
By moving a commercial 2D LiDAR, 3D maps of the environment can be built based on the data of the 2D LiDAR and its movement [8][9][10][11]. Compared with a commercial 3D LiDAR, a moving 2D LiDAR is more economical, while its measurement performance is far inferior to that of the former. For applications that do not require excess measurement performance and require strict cost control (such as the 3D perception of the environment by a commercial home service robot), a moving 2D LiDAR may be useful. From this perspective, a moving 2D LiDAR is necessary and research-worthy.
It must be emphasized that a moving 2D LiDAR cannot completely replace a 3D LiDAR. In some applications, with high requirements on real-time performance and measurement ranges, such as automatic driving, a 3D LiDAR with better real-time performance and a longer measurement range is required, while a moving 2D LiDAR is not adequate. However, in other applications, such as the 3D mapping and navigation of an indoor robot, a moving 2D LiDAR can do the job. In these applications, a moving 2D LiDAR can partially replace a 3D LiDAR and provide a new choice for developers and engineers, which can reduce the costs, while the basic functions of 3D mapping are ensured.
In addition, a moving 2D LiDAR has the advantages of a flexible field of view and angular resolution. The field of view and angular resolution of a moving 2D LiDAR depend on the movement of the 2D LiDAR. Customizing scan parameters by moving LiDAR is not unique to 2D LiDAR. In [11][12][13][14][15][16][17][18][19], since the field of view and angular resolution of some 3D LiDARs are not suitable, researchers obtained the field of view and angular resolutions they wanted by moving these LiDARs.
2. Overview of Principles
In Figure 2, a TOF 2D LiDAR collects two sets of data at positions 1 and 2 in a room, respectively. At each position, in the fan-shaped scanning area of the 2D LiDAR, its emitter emits a certain number of laser beams, some of which shoot out of the door or window of the room, and do not reflect back. The remaining light beams encounter the objects or walls in the room, and reflect back. Those laser beams are received by the receiver of the 2D LiDAR, from which sampling points can be calculated.
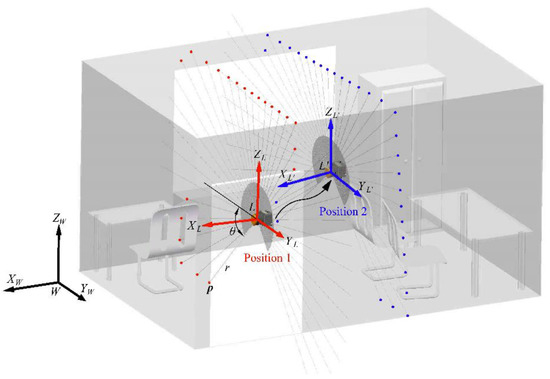
Figure 2. The principle of a moving 2D LiDAR.
The principle of a moving 2D LiDAR can be briefly summarized in one sentence, which is, 2D LiDAR collects sampling points at different positions, and these sampling points are converted to a global world coordinate frame. This process involves the conversion of the 3D coordinates of the sampling point between different coordinate frames. Here, we define three coordinate frames, namely, the coordinate frame of the 2D LiDAR (at position 1), which is denoted as L-XLYLZL; the coordinate frame of the 2D LiDAR at another position (position 2), which is denoted as L′-XL′YL′ZL′; the world coordinate frame W-XWYWZW, as shown in Figure 2.
3. Classification of the Prototypes
From a perspective of engineering, a moving 2D LiDAR can be built in many ways. In this section, we classify a moving 2D LiDAR by the most intuitive way, that is, the movement of 2D LiDAR.
For a moving 2D LiDAR, there are three common ways to move the 2D LiDAR, namely rotation, pitching, and push-broom. There is also literature on pitching as nodding [20][21][22]. In our paper, it is collectively referred to as pitching.
3.1. A Rotating 2D LiDAR and a Pitching 2D LiDAR
There are some similarities between a rotating 2D LiDAR and a pitching 2D LiDAR. For both of them, 2D LiDAR is rotated by a motor. The motor changes the attitude of the 2D LiDAR, and, at the same time, another motor inside the 2D LiDAR rotates the emitter, which can emit the laser beam. In this way, the emitter can emit the laser beam into 3D space, and the scanning area of the 2D LiDAR is no longer limited to a 2D plane. There are two rotation axes involved here, one of which is the axis of rotation of the 2D LiDAR, the other is the axis of rotation of the emitter inside the 2D LiDAR.
A rotating 2D LiDAR and a pitching 2D LiDAR are similar in principle. For both of them, the data collected by the 2D LiDAR and the angle position of the motor shaft are combined to calculate the 3D coordinates of the sampling points. According to the general principle of a moving 2D LiDAR analyzed in Section 2, for a rotating 2D LiDAR and a pitching 2D LiDAR, the TWL in Equation (2) is a zero vector, and RWL is the rotation matrix calculated according to the angle position of the motor shaft. The angle position of the motor shaft mentioned here is relative to the initial angle position. The initial angle position of the motor shaft should be recognized as a reference. In order to define the initial angle position of the motor shaft, an absolute encoder or a photoelectric switch is required.
There are some points that need to be noted for both a rotating 2D LiDAR and a pitching 2D LiDAR: the optical center of the 2D LiDAR must coincide with its rotation axis, this depends on the mechanical accuracy; the ranging data of 2D LiDAR must be synchronized with its rotation/pitch angle, the accuracy of synchronization determines the accuracy of the rotation matrix RWL. In addition, the mechanical structure that rotate/pitch the 2D LiDAR should not obstruct the field of view of the 2D LiDAR [23].
The main difference between a rotating 2D LiDAR and a pitching 2D LiDAR is that the rotation axis of a rotating 2D LiDAR coincides with the middle line of the scanning sector, while the rotation axis of a pitching 2D LiDAR is perpendicular to the middle line of the scanning sector and is coplanar with the scanning sector. The rotation angle of a rotating 2D LiDAR should to be no less than 180°, otherwise there will be blind areas in the field of view, while the rotation angle of a pitching 2D LiDAR can be flexibly adjusted according to the need of the field of view, as shown in Figure 3. From this point of view, a pitching 2D LiDAR can scan the front area faster than a rotating 2D LiDAR, and is thus more suitable for the area monitoring of mobile robots [23]. As mentioned in [20], for a rotating 2D LiDAR, when the 2D LiDAR is rotated around an axis parallel to the observation direction, it is suitable for environments such as tunnels or corridors. For a pitching 2D LiDAR, when the 2D LiDAR is rotated around an axis perpendicular to the observation direction, it is suitable for general ground robot applications, because in such applications, dense 3D point clouds that can show the terrain ahead are required.
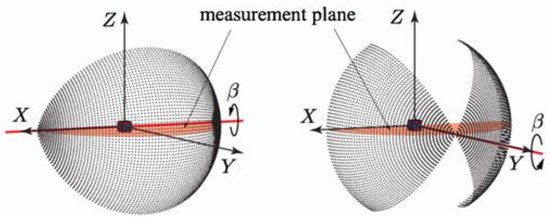
Figure 3. A pitching 2D LiDAR (left) and a rotating 2D LiDAR (right) [23].
In actual applications, whether a rotating 2D LiDAR or a pitching 2D LiDAR, the attitude of the rotation axis of the 2D LiDAR is very important. For indoor mobile robots, some of its obstacles are objects with relatively small sizes in the horizontal direction and relatively large sizes in the vertical direction, such as human bodies, pillars, or table legs. In order to avoid the missed detection of these obstacles, the axis of rotation should be horizontal rather than vertical, that is, it should be like (a) and (b) in Figure 4, rather than (c) and (d). In order to increase the scanning speed, the angular resolution of the motor rotation is often lower than the angular resolution of the scanning sector of a 2D LiDAR, so when the rotation axis is horizontal rather than vertical, the missed detection of the above-mentioned obstacles may be more likely to be avoided. Figure 5 shows the prototypes in [20][21][24][22][23].
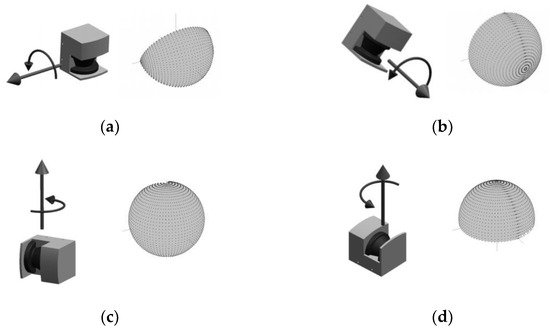
Figure 4. A rotating 2D LiDAR and a pitching 2D LiDAR in different attitudes. (a) A pitching 2D LiDAR whose rotation axis is horizontal; (b) a rotating 2D LiDAR whose rotation axis is horizontal; (c) a pitching 2D LiDAR whose rotation axis is vertical; (d) a rotating 2D LiDAR whose rotation axis is vertical [24].
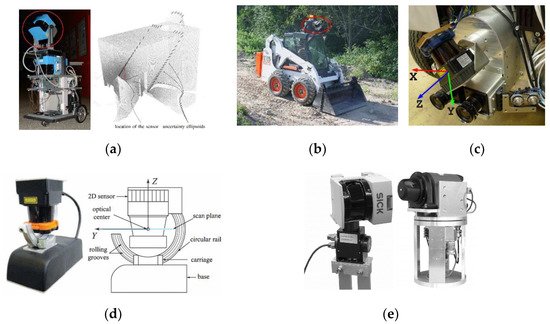
Figure 5. A rotating 2D LiDAR and a pitching 2D LiDAR. (a) A pitching 2D LiDAR mounted on a mobile platform. Left: the prototype in [22]; right: the pitching scanning example in [22]; (b) the prototype in [21], a rotating 2D LiDAR (circled in red) which is mounted on a skid-steer loader; (c) the prototype in [20], which is a rotating 2D LiDAR; (d) the prototype in [23], which is a pitching 2D LiDAR; (e) the prototypes in [24]. Left: the first-generation prototype, which is a pitching 2D LiDAR whose rotation axis is vertical; right: the second-generation prototype, which is a rotating 2D LiDAR. Compared with the first-generation prototype, in the second-generation prototype a slip ring has been used, so that the 2D LiDAR can be rotated endlessly, without being blocked by cables.
3.2. A Push-Broom 2D LiDAR
Compared with a rotating 2D LiDAR and a pitching 2D LiDAR, the main feature of a push-broom 2D LiDAR is that there is no relative movement between the 2D LiDAR and the mobile platform on which it is carried, the 2D LiDAR is fixedly assembled on the mobile platform. The mobile platform mentioned here may be a vehicle [25][26][27][28], a backpack [16][29][30], a handheld pole [31][32], or a UAV (unmanned aerial vehicle) [33][34], as shown in Figure 6.
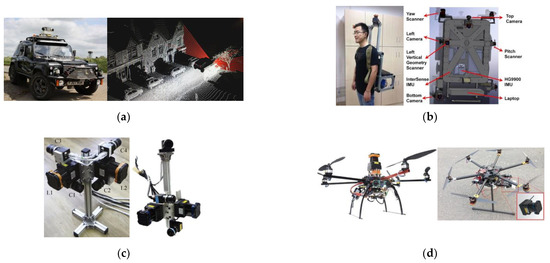
Figure 6. Push-broom 2D LiDARs carried by different platforms. (a) A push-broom 2D LiDAR mounted on a vehicle. Left: the experimental platform in [25]; right: the push-broom scanning example in [28]; (b) push-broom 2D LiDARs mounted on a backpack. Left: the prototype in [29]; right: the 3D model of the prototype in [30]; (c) handheld push-broom 2D LiDARs. Left: the prototype in [31]; right: the prototype in [32]; (d) UAV-mounted push-broom 2D LiDARs. Left: the prototype in [33]; right: the prototype in [34].
Since there is no relative movement between the 2D LiDAR and the mobile platform carrying it, in order to make the scanning range of the 2D LiDAR no longer limited to a plane, to build the 3D point cloud data of the environment, the mobile platform on which the 2D LiDAR is mounted should move relative to the environment. The principle of a push-broom 2D LiDAR is to build a 3D point cloud by combining the data of the 2D LiDAR and the position and attitude of the mobile platform. Therefore, in order to build a 3D map accurately, the movement of the mobile platform should be accurately known. In Section 2, we came to the conclusion that, for a moving 2D LiDAR, the space rigid body transformation parameters between the 2D LiDAR coordinate frame and the world coordinate frame (that is, the rotation matrix RWL and the translation vector TWL) should be accurately known, so that the coordinates of the sampling points relative to the world coordinate frame can be accurately calculated by Equation (2). For a push-broom 2D LiDAR, RWL and TWL are determined by the movement of the mobile platform and the mechanical installation position of the 2D LiDAR on the mobile platform.
3.3. Other Categories
In addition to the three common categories of a rotating 2D LiDAR, a pitching 2D LiDAR and a push-broom 2D LiDAR mentioned above, other categories can be found in some literatures.
3.3.1. An Irregularly Rotating 2D LiDAR
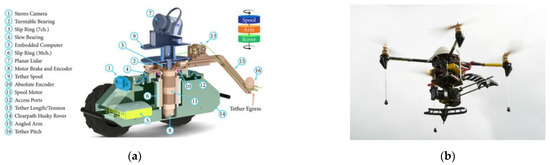
In [35], a 2D LiDAR is employed for 3D mapping of a tethered robot in steep terrain. The 2D LiDAR is fixedly mounted on the cable drum of the robot, when the cable drum is rotated by the motor, the 2D LiDAR is rotated too, and the position of the robot on the cliff changes accordingly. In this way, 2D LiDAR can be utilized to build 3D point cloud at different positions of the cliff.
The above-mentioned solution is somewhat similar to a rotating 2D LiDAR. The main differences are as follows: (1) the rotation of the 2D LiDAR is non-periodic and irregular, while for a rotating 2D LiDAR described in Section 3.1, the rotation of the 2D LiDAR is periodic and regular. (2) The rotation axis of the 2D LiDAR does not coincide with the middle line of the scanning sector, because the 2D LiDAR is installed obliquely on the cable drum. For a rotating 2D LiDAR, the rotation axis of the 2D LiDAR generally coincides with the centerline of the scanning sector.
In [36], the 2D LiDAR also rotates irregularly, and is carried by a UAV for aerial mapping. The 2D LiDAR is not rotated by a motor; it is rotated by the airflow generated by the four propellers of the UAV. The airflow blows the blades fixed together with the 2D LiDAR to rotate the 2D LiDAR around an axis.
In the cases of [35][36], because the rotation of the 2D LiDAR is non-periodic and irregular, so this category of a moving 2D LiDAR can be called an irregularly rotating 2D LiDAR. Figure 7 shows the prototypes in [35][36].
3.3.2. An Obliquely Rotating 2D LiDAR
In [37][38][39][40], the 2D LiDAR is rotated periodically by a motor, unlike a rotating 2D LiDAR mentioned above, the 2D LiDAR is installed obliquely here, as the result of which, the distribution of the 3D point cloud is not a set of parallel lines, but a set of grid-like lines, as shown in Figure 8. In this way, the missed detection of obstacles can be effectively avoided, especially when the resolution of the motor rotation angle is low and the point cloud is sparse [40]. In order to distinguish it from a rotating 2D LiDAR mentioned in Section 3.1, this category can be called an obliquely rotating 2D LiDAR.
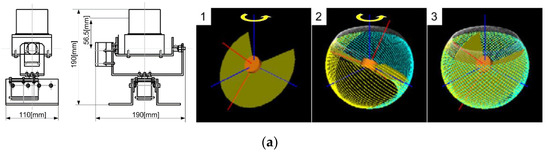
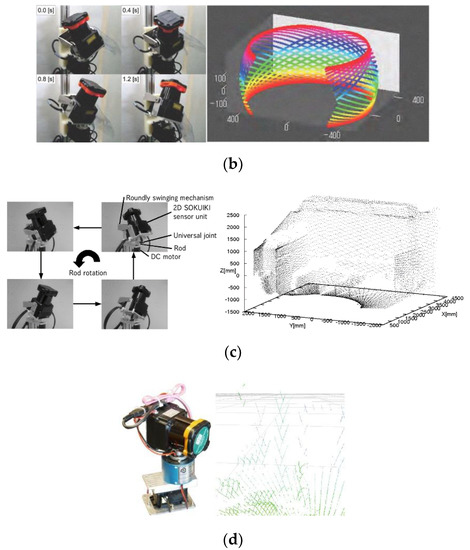
Figure 8. An obliquely rotating 2D LiDAR, the 2D LiDAR is rotated periodically and is mounted obliquely. The distribution of the 3D point cloud built by an obliquely rotating 2D LiDAR is a set of grid-like lines. (a) The prototype in [37]; (b) the prototype in [38]; (c) the prototype in [39]; (d) the prototype in [40].
It is worth noting that, for an obliquely rotating 2D LiDAR, in order to obtain the grid-like 3D point cloud of the surrounding 360° environment, the 2D LiDAR needs to be rotated 360°. For a rotating 2D LiDAR, a 3D point cloud of the surrounding 360° environment can be built if the 2D LiDAR is rotated 180°. An obliquely rotating 2D LiDAR can also build a 3D point cloud of the surrounding 360° environment by rotating the 2D LiDAR 180°, but the distribution of the 3D point cloud is a series of oblique parallel lines, while a 360° rotation can build a grid-like 3D point cloud, as shown in Figure 8a. When a grid-like 3D point cloud is wanted, an obliquely rotating 2D LiDAR needs to rotate the 2D LiDAR 360°, as a result of this, two problems are caused. First, the degradation of the real-time performance. As the 2D LiDAR needs to be rotated for more angles, the time it takes for building a 3D point will be increased. Second, the torsion of the cable. Compared with the rotation of 180°, the rotation of 360° will cause greater torsion of the cables of the 2D LiDAR, so the cables need to be arranged reasonably. The use of a slip ring can eliminate the torsion of the cables, but it will increase the volume, weight, and cost of the prototype.
3.3.3. An Irregularly Moving 2D LiDAR
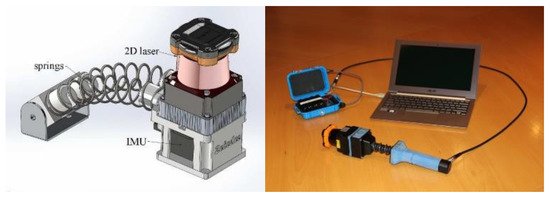
In [41][42], a handheld 3D mapping device, named Zebedee, was developed. A 2D LiDAR and an IMU (inertial measurement unit) was mounted on one end of the spring, and the other end of the spring was fixed on the handheld pole, as shown in Figure 9. When someone held Zebedee and passed through the environment to be mapped, the 2D LiDAR at the end of the spring bounced back and forth while collecting data. The movement of the 2D LiDAR was determined by many factors, such as the walking route, the bump of the walking, the stiffness of the spring, etc. Movement of the 2D LiDAR is irregular, so we call this category an irregularly moving 2D LiDAR.
3.4. Extra 1: A Moving 3D LiDAR
By moving a commercial 2D LiDAR, 3D point clouds can be built; by moving a commercial 3D LiDAR, the field of view and resolution of the 3D LiDAR can be improved. In this subsection, we extra discuss related research on a moving 3D LiDAR.
The terrestrial 3D laser scanners used for laser mapping of large-size objects [43][44] have wide field of views and they can build 3D point clouds, which are very dense, but they are usually very expensive and inconvenient to carry. The 3D LiDARs used for automatic driving [45] are relatively cheap, and their sizes and weights are more suitable for mobile platforms, but their vertical field of views and vertical resolutions are very limited [11][45]. These kinds of 3D LiDARs are designed for automatic driving, for this application, their vertical field of views and vertical resolutions are adequate. However, in some applications, dense 3D point clouds with full view are required. So, these kinds of 3D LiDARs cannot be used in these applications directly.
In some research, this problem was solved by moving a 3D LiDAR, so that a 3D LiDAR with a limited vertical field of view and vertical resolution can build a 3D point cloud with a wider vertical field of view and a higher vertical resolution.
Similar to a moving 2D LiDAR, the main ways to move a 3D LiDAR are rotation, pitching, and push-broom. The principle is also similar. A rotating 3D LiDAR and a pitching 3D LiDAR build 3D point clouds by combining the data of the 3D LiDAR and the angle position of the motor shaft. A push-broom 3D LiDAR builds 3D point clouds by combining the data of the 3D LiDAR and the position and attitude of the mobile platform. In order to make up for the deficiency of the vertical field of view and vertical resolution of the 3D LiDAR, in a push-broom 3D LiDAR, the 3D LiDAR is usually mounted obliquely rather than horizontally. Some representative application cases of a rotating 3D LiDAR, a pitching 3D LiDAR, and a push-broom 3D LiDAR are listed as follows.
In terms of a rotating 3D LiDAR and a pitching 3D LiDAR, a 16-line 3D LiDAR Velodyne VLP-16 (Puck) is rotated by a motor to build dense 3D point clouds quickly in [12]. Compared with a rotating 2D LiDAR and a pitching 2D LiDAR, it needs less time to build a 3D point cloud, for the sampling speed of a 3D LiDAR is usually much higher than that of a 2D LiDAR. In [13], a pitching 3D LiDAR is used for the autonomous navigation of an unmanned vehicle, the 3D LiDAR used in this prototype is also Velodyne VLP-16 (Puck), it is swung up and down by a servo motor. In [14], a pitching 64-line 3D LiDAR Velodyne HDL-64e is mounted on a four-wheeled robot for the 3D mapping of the underground mines. Since the 3D LiDAR used in this prototype is pretty heavy (the weight of Velodyne HDL-64e is nearly 15 kg), a worm is used to increase the motivation so that the 3D LiDAR can be swung easily. However, this complicated design will not only further increase the volume, weight and cost of the prototype, but also lead to transmission clearance. This deficiency has been mentioned at the end of this literature. In [11], a portable tilt mechanism is designed to rotate a 3D LiDAR VLP-16, in this literature the spatial distribution of the 3D point cloud is focused on. The further study of this issue is in [15]. Moreover, similar research was done in [46]; this literature also focuses on the spatial distribution of the 3D point cloud, the difference is that in this literature, a moving 2D LiDAR, rather than a moving 3D LiDAR is used. Figure 10 shows the prototypes in the above-mentioned literatures.
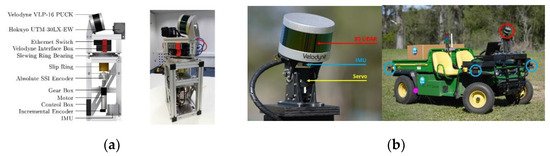
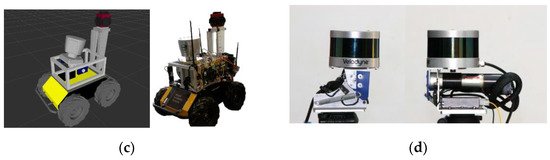
Figure 10. A rotating 3D LiDAR and a pitching 3D LiDAR. (a) The prototype in [12]; (b) left: the prototype in [13]; right: the prototype (in the red circle) is mounted on an unmanned vehicle, the blue circles and the purple dot represent the 2D LiDARs and the rear wheel encoder respectively; (c) the prototype in [14]; (d) the prototype in [11], left: side view; right: front view.
In terms of a push-broom 3D LiDAR, A backpack-style 3D scanning device was developed by Wang [16][17][18], it is equipped with two 16-line 3D LiDARs VLP-16, one of which is mounted horizontally, and the other is mounted obliquely, its oblique angle is 45°. The sampling points collected by these two 3D LiDARs are converted to a global world coordinate frame. This backpack-style 3D scanning device can be utilized for the global 3D mapping of a large-scale structured environment. Similarly, the prototype in [19] can also be used for the global 3D mapping of a large-scale structured environment, compared with Wang’s research, the difference is that in this prototype, a 32-line 3D LiDAR Velodyne HDL-32e is carried by a trolley, it is mounted obliquely and the angle between the 3D LiDAR and the ground is approximately 66°. Figure 11 shows the prototypes in the above-mentioned literatures.

Figure 11. A push-broom 3D LiDAR. (a) The prototype in [16][17][18]; (b) left: the prototype in [19], in which the red device mounted above is a ladybug panoramic camera, it is used to perceive colors. The silver-white device mounted obliquely below is a 32-line 3D LiDAR Velodyne HDL-32e; right: the prototype is carried by a trolley.
Compared with a moving 2D LiDAR, a moving 3D LiDAR has the following features. (1) Better real-time performance. Because the sampling speed of a 3D LiDAR is generally faster than that of a 2D LiDAR, as a result of which, a dense 3D point cloud can be built by a moving 3D LiDAR in shorter time. Therefore, a moving 3D LiDAR is more suitable for applications with high real-time requirements [12]. If a moving 2D LiDAR is used, the only way to shorten the time of a 3D scan is to reduce the density of the 3D point cloud. Compared with a 3D LiDAR, a 2D LiDAR collects fewer sampling points per unit time. (2) A greater measurement ranges. Since the 3D LiDARs utilized in moving 3D LiDARs are mostly designed for automatic driving, their measurement ranges should be adequate. While 2D LiDARs are mostly designed for indoor navigation and mapping of mobile robots, their measurement ranges are generally smaller than that of 3D LiDARs. This can be seen from Table A1 in Appendix A. Therefore, the measurement range of a moving 3D LiDAR is generally greater than that of a moving 2D LiDAR. (3) The distribution of the 3D point cloud built by a moving 3D LiDAR is more complicated. The reason is that a 3D LiDAR is multi-line, while a 2D LiDAR is single-line. As mentioned in [11], adding additional degrees of freedom to a multi-beam LiDAR (that is, multi-line 3D LiDAR) will lead to the overlap of the multiple scanning beams, so the horizontal and vertical angular resolution distribution of the collected 3D point cloud is uneven. (4) The cost is higher. Although it is mentioned in [12] that, as the price of a multi-line 3D LiDAR is becoming lower and lower, adding an extra movement to a commercial 3D LiDAR may become a general solution in the near future, to collect 3D point clouds data with high resolution quickly and within a reasonable cost range. However, for now, the price of a 3D LiDAR is still much higher than that of a 2D LiDAR, and this situation is unlikely to change significantly in the next few years. Therefore, in general, a moving 3D LiDAR is far more expensive than a moving 2D LiDAR, for now and for the future.
3.5. Extra 2: DIY Low-Cost 3D LiDAR and a Rotating Mirror/Prism
A moving 2D LiDAR discussed in this paper is built by adding a movement to a commercial 2D LiDAR. Besides, in some research on low-cost 3D laser scanning technology, commercial LiDARs are not used. Instead, DIY (do-it-yourself) low-cost 3D LiDARs are built. The 3D LiDARs in these studies are fully DIY [47][48][49], or a mirror or prism is used to change the optical path of the laser beams [47][48][49][50]. Specifically, in [47], two prisms are utilized to project the laser beam in a large range in the vertical direction, as the result of which, a DIY 2D LiDAR is constructed. This DIY 2D LiDAR is rotated by a motor to collect the 3D sampling points of the environment. In [48], the emitter and receiver of the laser beams are rotated in a 2D plane; a mirror is rotated to change the optical path of the laser beams to add a scanning dimension of this prototype, allowing it to scan the environment in 3D. In [49], the emitter and receiver of the laser beams are fixedly mounted; a rotating prism is utilized to change the optical path of the laser beams in two dimensions to realize the 3D scanning function of the prototype. Similarly, in [50], a commercial 2D LiDAR is fixedly mounted, a rotating mirror is utilized to change the optical path of the laser beams. A 3D point cloud can be built according to the data of the 2D LiDAR and the rotation angle of the mirror. Figure 12 shows the prototypes in the above-mentioned literatures.
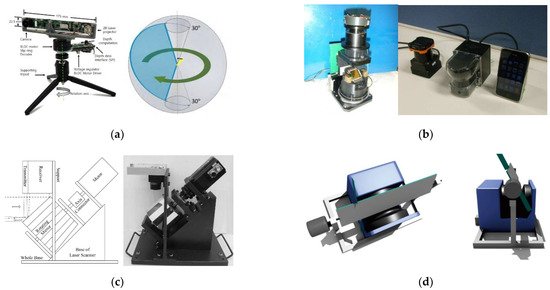
Figure 12. The prototypes in [47][48][49][50]. (a) Left: the prototype in [47]; right: the field of view of this prototype; (b) the prototypes in [48]. Left: the first-generation prototype; right: the second-generation prototype, it is placed between a commercial 2D LiDAR and a mobile phone to show its size; (c) the prototype in [49]; (d) the prototype in [50].
Compared with the method of adding a movement to a commercial 2D LiDAR, the method described in this subsection has greater technical difficulties. DIY LiDARs are certainly not as mature and reliable as commercial LiDARs in terms of technology, and the accuracy and stability of DIY LiDARs are not easily to be ensured. The way of changing the optical path through a mirror or a prism requires very high mechanical accuracy, while high mechanical accuracy requirement is not conducive to cost control of the prototype. In addition, stains and dust on the mirror or prism may block the propagation of the laser beam. In view of the above defects, the method described in this subsection is not the focus of our paper. In our paper, we focus on how to use commercial 2D LiDAR to build the 3D maps of the environment in low-cost. As mentioned in [23], it is a most feasible and common solution to apply a 2D LiDAR to the low-cost 3D mapping of the environment.
References
- Yilmaz, V. Automated ground filtering of LiDAR and UAS point clouds with metaheuristics. Opt. Laser Technol. 2021, 138, 106890.
- Jarén, R.R.; Arranz, J.J. Automatic segmentation and classification of BIM elements from point clouds. Autom. Constr. 2021, 124, 103576.
- Javanmardi, E.; Javanmardi, M.; Gu, Y.; Kamijo, S. Autonomous vehicle self-localization based on multilayer 2D vector map and multi-channel LiDAR. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017.
- Briechle, S.; Krzystek, P.; Vosselman, G. Silvi-Net—A dual-CNN approach for combined classification of tree species and standing dead trees from remote sensing data. Int. J. Appl. Earth Obs. Geoinf. 2021, 98, 102292.
- Estornell, J.; Hadas, E.; Martí, J.; López-Cortés, I. Tree extraction and estimation of walnut structure parameters using airborne LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102273.
- Slamtec Rplidar A1. Available online: (accessed on 20 December 2020).
- Velodyne HDL-64E. Available online: (accessed on 13 April 2021).
- Kang, X.; Yin, S.; Fen, Y. 3D Reconstruction & Assessment Framework based on affordable 2D Lidar. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 292–297.
- Palacín, J.; Martínez, D.; Rubies, E.; Clotet, E. Mobile Robot Self-Localization with 2D Push-Broom LIDAR in a 2D Map. Sensors 2020, 20, 2500.
- Morales, J.; Martínez, J.; Mandow, A.; Reina, A.; Pequenoboter, A.; García-Cerezo, A. Boresight Calibration of Construction Misalignments for 3D Scanners Built with a 2D Laser Rangefinder Rotating on Its Optical Center. Sensors 2014, 14, 20025–20040.
- Morales, J.; Plazaleiva, V.; Mandow, A.; Gomezruiz, J.; Serón, J.; GarcíaCerezo, A. Analysis of 3D Scan Measurement Distribution with Application to a Multi-Beam Lidar on a Rotating Platform. Sensors 2018, 18, 395.
- Neumann, T.; Dülberg, E.; Schiffer, S.; Ferrein, A. A Rotating Platform for Swift Acquisition of Dense 3D Point Clouds. In Proceedings of the International Conference on Intelligent Robotics and Applications, Tokyo, Japan, 22–24 August 2016; pp. 257–268.
- Pfrunder, A.; Borges, P.V.K.; Romero, A.R.; Catt, G.; Elfes, A. Real-time autonomous ground vehicle navigation in heterogeneous environments using a 3D LiDAR. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017.
- Neumann, T.; Ferrein, A.; Kallweit, S.; Scholl, I. Towards a Mobile Mapping Robot for Underground Mines. In Proceedings of the 2014 PRASA, RobMech and AfLaT International Joint Symposium, Cape Town, South Africa, 27–28 November 2014.
- Mandow, A.; Morales, J.; Gomez-Ruiz, J.A.; Garcia-Cerezo, A.J. Optimizing Scan Homogeneity for Building Full-3D Lidars Based on Rotating a Multi-Beam Velodyne Range-Finder. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018.
- Wen, C.; Sun, X.; Hou, S.; Tan, J.; Dai, Y.; Wang, C.; Li, J. Line Structure-Based Indoor and Outdoor Integration Using Backpacked and TLS Point Cloud Data. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1790–1794.
- Gong, Z.; Wen, C.; Wang, C.; Li, J. A Target-Free Automatic Self-Calibration Approach for Multibeam Laser Scanners. IEEE Trans. Instrum. Meas. 2017, 67, 238–240.
- Wang, C.; Hou, S.; Wen, C.; Gong, Z.; Li, Q.; Sun, X.; Li, J. Semantic line framework-based indoor building modeling using backpacked laser scanning point cloud. ISPRS J. Photogramm. Remote Sens. 2018, 143, 150–166.
- Vlaminck, M.; Luong, H.; Goeman, W.; Philips, W. 3D Scene Reconstruction Using Omnidirectional Vision and LiDAR: A Hybrid Approach. Sensors 2016, 16, 1923.
- Alismail, H.; Browning, B. Automatic Calibration of Spinning Actuated Lidar Internal Parameters. J. Field Robot. 2015, 32, 723–747.
- Bosse, M.; Zlot, R. Continuous 3D scan-matching with a spinning 2D laser. In Proceedings of the IEEE International Conference on Robotics & Automation, Kobe, Japan, 12–17 May 2019.
- Weingarten, J.W.; Siegwart, R. 3D SLAM using planar segments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Beijing, China, 9–15 October 2006.
- Morales, J.; Martinez, J.L.; Mandow, A.; Pequenoboter, A.; Garciacerezo, A. Design and development of a fast and precise low-cost 3D laser rangefinder. In Proceedings of the International Conference on Mechatronics, Beijing, China, 7–10 August 2011; pp. 621–626.
- Oliver Wulf, B.W. Fast 3D scanning methods for laser measurement systems. In Proceedings of the International Conference on Control Systems and Computer Science, CSCS14, Bucharest, Romania, 2–5 July 2003.
- Baldwin, I.; Newman, P. Laser-only road-vehicle localization with dual 2D push-broom LIDARS and 3D priors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Algarve, Portugal, 7–12 October 2012.
- Newman, P.M.; Baldwin, I. Generation of 3D Models of an Environment. U.S. Patent WO2014128498A2, 28 August 2014. Available online: (accessed on 26 April 2021).
- Baldwin, I.; Newman, P. Road vehicle localization with 2D push-broom LIDAR and 3D priors. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012.
- Napier, A.; Corke, P.; Newman, P. Cross-calibration of push-broom 2D LIDARs and cameras in natural scenes. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013.
- Wen, C.; Pan, S.; Wang, C.; Li, J. An Indoor Backpack System for 2-D and 3-D Mapping of Building Interiors. IEEE Geosci. Remote Sens. Lett. 2016, 13, 992–996.
- Liu, T.; Carlberg, M.; Chen, G.; Chen, J.; Zakhor, A. Indoor localization and visualization using a human-operated backpack system. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010.
- Bok, Y.; Choi, D.; Jeong, Y.; Kweon, I.S. Capturing village-level heritages with a hand-held camera-laser fusion sensor. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Barcelona, Spain, 6–13 November 2011.
- Dong-Geol, C.; Yunsu, B.; Jun-Sik, K.; Inwook, S.; In, K. Structure-From-Motion in 3D Space Using 2D Lidars. Sensors 2017, 17, 242.
- Winkvist, S.; Rushforth, E.; Young, K. Towards an autonomous indoor aerial inspection vehicle. Ind. Robot. 2013, 40, 196–207.
- Wang, A.; Li, C.; Liu, Y.; Zhuang, Y.; Bu, C.; Xiao, J. Laser-based Online Sliding-window Approach for UAV Loop-closure Detection in Urban Environments. Int. J. Adv. Robot. Syst. 2017, 13, 1–11.
- Mcgarey, P.; Yoon, D.; Tang, T.; Pomerleau, F.; Barfoot, T.D. Developing and deploying a tethered robot to map extremely steep terrain: MCGAREY et al. J. Field Robot. 2018, 35, 1327–1341.
- Kaul, L.; Zlot, R.; Bosse, M. Continuous-Time Three-Dimensional Mapping for Micro Aerial Vehicles with a Passively Actuated Rotating Laser Scanner. J. Field Robot. 2015, 33, 103–132.
- Ohno, K.; Kawahara, T.; Tadokoro, S. Development of 3D laser scanner for measuring uniform and dense 3D shapes of static objects in dynamic environment. In Proceedings of the IEEE International Conference on Robotics & Biomimetics, Guilin, China, 19–23 December 2009.
- Yoshida, T.; Irie, K.; Koyanagi, E.; Tomono, M. A sensor platform for outdoor navigation using gyro-assisted odometry and roundly-swinging 3D laser scanner. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010.
- Matsumoto, M. 3D laser range sensor module with roundly swinging mechanism for fast and wide view range image. In Proceedings of the IEEE Conference on Multisensor Fusion and Integration, Salt Lake City, UT, USA, 5–7 September 2010.
- Schubert, S.; Neubert, P.; Protzel, P. How to Build and Customize a High-Resolution 3D Laserscanner Using Off-the-shelf Components. In Proceedings of the Conference towards Autonomous Robotic Systems, Sheffield, UK, 26 June–1 July 2016.
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a Spring-Mounted 3-D Range Sensor with Application to Mobile Mapping. IEEE Trans. Robot. 2012, 28, 1104–1119.
- Bosse, M.; Zlot, R. Place recognition using keypoint voting in large 3D lidar datasets. In Proceedings of the IEEE International Conference on Robotics & Automation, Karlsruhe, Germany, 6–10 May 2013.
- Leica. Available online: (accessed on 12 April 2021).
- Faro. Available online: (accessed on 26 April 2021).
- Velodyne. Available online: (accessed on 12 April 2021).
- Desai, A.; Huber, D. Objective Evaluation of Scanning Ladar Configurations for Mobile Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, St. Louis, MO, USA, 11–15 October 2009.
- Son, Y.; Yoon, S.; Oh, S.Y.; Han, S. A Lightweight and Cost-Effective 3D Omnidirectional Depth Sensor Based on Laser Triangulation. IEEE Access 2019, 7, 58740–58750.
- Kimoto, K.; Asada, N.; Mori, T.; Hara, Y.; Yuta, S.I. Development of small size 3D LIDAR. In Proceedings of the IEEE International Conference on Robotics & Automation, Hong Kong, China, 31 May–5 June 2014.
- Hu, C.; Huang, Z.; Qin, S. A New 3D Imaging Lidar Based on the High-Speed 2D Laser Scanner; SPIE—The International Society for Optical Engineering: Bellingham, WA, USA, 2012.
- Ryde, J.; Hu, H. Mobile Robot 3D Perception and Mapping without Odometry Using Multi-Resolution Occupancy Lists. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–9 August 2007; pp. 331–336.


