Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Zhinan Gao | -- | 50 | 2024-01-17 10:32:54 | | | |
| 2 | Zhinan Gao | + 1224 word(s) | 1274 | 2024-01-18 02:54:50 | | | | |
| 3 | Catherine Yang | + 9 word(s) | 1283 | 2024-01-18 03:11:45 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Gao, Z.; Li, D.; Wen, G.; Kuai, Y.; Chen, R. Drone Based RGBT Tracking with Dual-Feature Aggregation Network. Encyclopedia. Available online: https://encyclopedia.pub/entry/53959 (accessed on 26 July 2026).
Gao Z, Li D, Wen G, Kuai Y, Chen R. Drone Based RGBT Tracking with Dual-Feature Aggregation Network. Encyclopedia. Available at: https://encyclopedia.pub/entry/53959. Accessed July 26, 2026.
Gao, Zhinan, Dongdong Li, Gongjian Wen, Yangliu Kuai, Rui Chen. "Drone Based RGBT Tracking with Dual-Feature Aggregation Network" Encyclopedia, https://encyclopedia.pub/entry/53959 (accessed July 26, 2026).
Gao, Z., Li, D., Wen, G., Kuai, Y., & Chen, R. (2024, January 17). Drone Based RGBT Tracking with Dual-Feature Aggregation Network. In Encyclopedia. https://encyclopedia.pub/entry/53959
Gao, Zhinan, et al. "Drone Based RGBT Tracking with Dual-Feature Aggregation Network." Encyclopedia. Web. 17 January, 2024.
Copy Citation
In the field of UAV-based object tracking, the use of infrared mode can improve the robustness of the tracker in the scene with severe illumination changes, occlusion and expand the applicable scenarios of UAV-based object tracking tasks. Inspired by the great achievements of Transformer architecture in the field of RGB object tracking, a dual-mode object tracking network based on Transformer can be designed.
RGBT tracking
Drone based object tracking
transformer
feature aggregation
1. Introduction
Object tracking is one of the fundamental tasks in computer vision and has been widely used in robot vision, video analysis, autonomous driving and other fields [1]. Among them, the drone scene is an important application scenario for object tracking which assist drones in playing a crucial role in urban governance, forest fire protection, traffic management, and other fields. Given the initial position of a target, object tracking is to capture the target in subsequent video frames. Thanks to the availability of large datasets of visible images [2], visible-based object tracking algorithms have made significant progress and achieved state-of-the-art results in recent years. Currently, due to the diversification of drone missions, visible object tracking is unable to meet the diverse needs of drones in various application scenarios [3]. Due to the limitations of visible imaging mechanisms, object tracking heavily relies on optimal optical conditions. However, in realistic drone scenarios, UAVs are required to perform object tracking tasks in dark and foggy environments. In such situations, visible imaging conditions are inadequate, resulting in significantly noisy images. Consequently, object tracking algorithms based on visible imaging fail to function properly.
Infrared images are produced by measuring the heat emitted by objects. Compared with visible images, infrared images have relatively poor visual effects and complementary target location information [4][5]. In addition, infrared images are not sensitive to changes in scene brightness, and thus maintain good imaging results even in poor lightning environments. However, the imaging quality of infrared images is poor and the spatial resolution and grayscale dynamic range are limited, resulting in a lack of details and texture information in the images. In contrast, visible images are very rich in details and texture features. In summary, visible and infrared object tracking has received increasing attention as it can meet the mission requirements of drones in various scenarios, due to the complementary advantages of infrared and visible images (Figure 1).
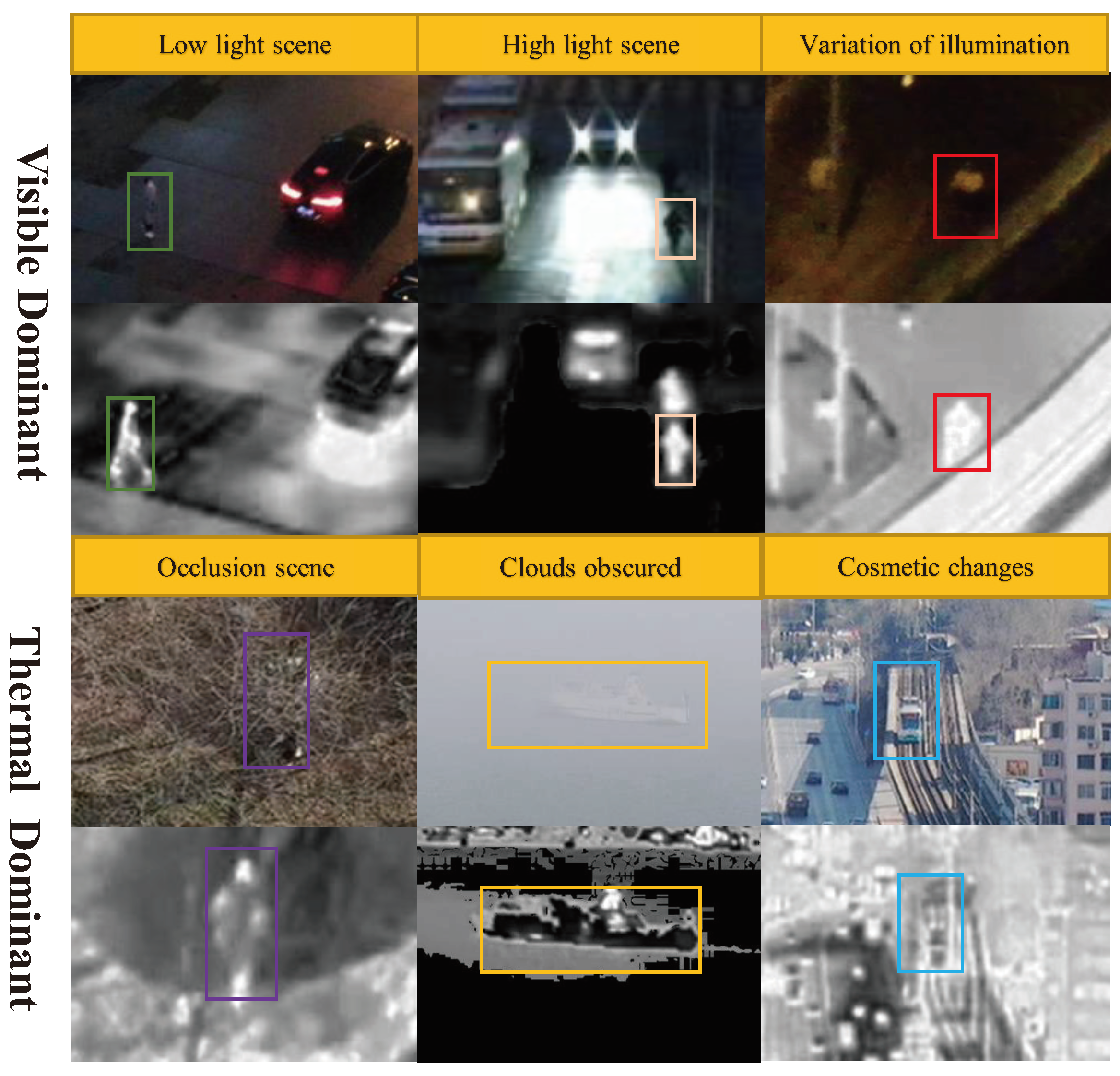
Figure 1. These are some visible-infrared image pairs captured by drones. In some scenarios, visible images may be difficult to distinguish different objects, while infrared images can continue to work in these scenarios. Therefore, information from visible and infrared modalities can complement each other in these scenarios. Introducing information from the infrared modality is very beneficial for achieving comprehensive object tracking in drone missions.
Currently, two main kinds of methods in visual object tracking are deep learning (DL)-based methods and correlation filter (CF)-based approaches [1]. The methods based on correlation filtering utilize Fast Fourier Transform (FFT) to perform correlation operation in the frequency domain, which have a very fast processing speed and run in real-time. However, their accuracy and robustness are poor. The methods based on neural network mainly utilize the powerful feature extraction ability of neural network. Their accuracy is better than that of correlation filtering based methods while their speed is slower. With the proposal of Siamese networks [6][7], the speed of neural network-based tracking methods has been greatly improved. In recent years, the neural network-based algorithm has become the mainstream method for object tracking.
2. Drone Based RGBT Tracking with Dual-Feature Aggregation Network
2.1 RGBT Tracking Algorithms
Many RGBT trackers have been proposed so far [8][9][10][11]. Due to the rapid development of RGB trackers, current RGBT trackers mainly consider the problem of dual-modal information fusion within mature trackers finetuned on the RGBT tracking task, where the key is to fuse visible and infrared image information. Several fusion methods are proposed, which are categorized as image fusion, feature fusion and decision fusion. For image fusion, the mainstream approach is to fusion image pixels based on weights [12][13], but the main information extracted from image fusion is the homogeneous information of the image pairs, and the ability to extract heterogeneous information from infrared-visible image pairs is not strong. At the same time, image fusion has certain requirements for registration between image pairs, which can lead to cumulative errors and affect tracking performance. Most trackers aggregate the representation by fusing features [14][15]. Feature fusion is a more advanced semantic fusion compared with image fusion. There are many ways to fuse features, but the most common way is to aggregate features using weighting. Feature fusion has the potential of high flexibility and can be trained with massive unpaired data, which is well-designed to achieve significant promotion. Decision fusion models each modality independently and the scores are fused to obtain the final candidate. Compared with image fusion and feature fusion, decision fusion is the fusion method on a higher level, which uses all the information from visible and infrared images. However, it is difficult to determine the decision criteria. Luo et al. [8] utilize independent frameworks to track in RGB-T data and then the results are combined by adaptive weighting. Decision fusion avoids the heterogeneity of different modalities and is not sensitive to modality registration. Finally, these fusion methods can also be used complementarily. For example, Zhang [16] used image fusion, feature fusion and decision fusion simultaneously for information fusion and achieved good results in multiple tests.
2.2Transformer
Transformer originates from natural language processing (NLP) for machine translation and has been introduced to vision recently with great potential [17]. Inspired by the success in other fields, researchers have leveraged Transformer for tracking. Briefly, Transformer is an architecture for transforming one sequence into another one with the help of attention-based encoders and decoders. The attention mechanism can determine which parts of the sequence are important, breaking through the receptive field limitation of traditional CNN networks and capturing global information from the input sequence.
However, the attention mechanism requires more training data to establish global relationships. Therefore, Transformer will have a lower effect than traditional CNN networks in some tasks with smaller sample size and more emphasis on regional relationships [18]. Additionally, the attention mechanism is able to replace correlation filtering operations in the Siamese network by finding the most relevant region to the template in the search area in a global scope. The method of [19] applies Transformer to enhance and fuse features in the Siamese tracking for performance improvement.
2.3. UAV RGB-Infrared Tracking
Currently, there are few visible-light-infrared object tracking algorithms available for drones, mainly due to two reasons. Firstly, there is a lack of training data for visible -infrared images of drones. Previously, models were trained using infrared images generated from visible images due to the difficulty in obtaining infrared images. With the emergence of datasets such as LasHeR [20], it is now possible to directly use visible and infrared images for training. In addition, there are also datasets such as GTOT [21], RGBT210 [22], RGBT234 [23], etc. available for evaluating RGBT tracking algorithm performance. However, in the field of RGBT object tracking for drones, only the VTUAV [16] dataset is available. Due to the different imaging perspectives of images captured by drones compared to normal images, training algorithms with other datasets does not yield good results. Secondly, existing algorithms have slow running speeds, making them difficult to use directly. Existing mainstream RGBT object tracking algorithms are based on deep learning, which have to deal with both visible and infrared images at the same time, with a large amount of data, a complex algorithmic structure and a low processing speed, such as JMMAC (4fps) [24], FANet (2fps) [14], MANnet (2fps) [25]. In drone scenarios, there is a high demand for speed in RGBT object tracking algorithms for drones. It is necessary to simplify the algorithm structure and improve its speed.
References
- Zhang, X.; Ye, P.; Leung, H.; Gong, K.; Xiao, G. Object Fusion Tracking Based on Visible and Infrared Images: A Comprehensive Review. Inf. Fusion 2020, 63, 166–187.
- Huang, L.; Zhao, X.; Huang, K. GOT-10k: A Large High-Diversity Benchmark for Generic Object Tracking in the Wild. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1562–1577.
- Fan, H.; Ling, H.; Lin, L.; Yang, F.; Liao, C. LaSOT: A High-Quality Benchmark for Large-Scale Single Object Tracking. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019.
- Liu, Q.; Li, X.; He, Z.; Fan, N.; Yuan, D.; Wang, H. Learning Deep Multi-Level Similarity for Thermal Infrared Object Tracking. IEEE Trans. Multimed. 2021, 23, 2114–2126.
- Liu, Q.; Li, X.; He, Z.; Fan, N.; Liang, Y. Multi-Task Driven Feature Models for Thermal Infrared Tracking. arXiv 2019, arXiv:1911.11384.
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H.S. Fully-Convolutional Siamese Networks for Object Tracking. arXiv 2016, arXiv:1606.09549.
- Li, B.; Yan, J.; Wu, W.; Zhu, Z.; Hu, X. High Performance Visual Tracking with Siamese Region Proposal Network. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8971–8980.
- Luo, C.; Sun, B.; Yang, K.; Lu, T.; Yeh, W.C. Thermal infrared and visible sequences fusion tracking based on a hybrid tracking framework with adaptive weighting scheme. Infrared Phys. Technol. 2019, 99, 265–276.
- Yun, X.; Sun, Y.; Yang, X.; Lu, N. Discriminative Fusion Correlation Learning for Visible and Infrared Tracking. Math. Probl. Eng. 2019, 2019, 2437521.
- Zhang, P.; Wang, D.; Lu, H.; Yang, X. Learning Adaptive Attribute-Driven Representation for Real-Time RGB-T Tracking. Int. J. Comput. Vis. 2021, 129, 2714–2729.
- Kristan, M.; Matas, J.; Leonardis, A.; Felsberg, M.; Pflugfelder, R.; Kämäräinen, J.K.; Zajc, L.C.; Drbohlav, O.; Lukezic, A.; Berg, A.; et al. The Seventh Visual Object Tracking VOT2019 Challenge Results. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Republic of Korea, 27–28 October 2019; pp. 2206–2241.
- Jingchao, P.; Haitao, Z.; Zhengwei, H.; Yi, Z.; Bofan, W. Siamese Infrared and Visible Light Fusion Network for RGB-T Tracking. arXiv 2021, arXiv:2103.07302v1.
- Wu, Y.; Blasch, E.; Chen, G.; Bai, L.; Ling, H. Multiple source data fusion via sparse representation for robust visual tracking. In Proceedings of the 2011 Proceedings of the 14th Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011.
- Zhu, Y.; Li, C.; Luo, B.; Tang, J. FANet: Quality-Aware Feature Aggregation Network for Robust RGB-T Tracking. arXiv 2018, arXiv:1811.09855.
- Li, C.; Wu, X.; Zhao, N.; Cao, X.; Tang, J. Fusing Two-Stream Convolutional Neural Networks for RGB-T Object Tracking. Neurocomputing 2017, 281, 78–85.
- Zhang, P.; Zhao, J.; Wang, D.; Lu, H.; Ruan, X. Visible-Thermal UAV Tracking: A Large-Scale Benchmark and New Baseline. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 8876–8885.
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Houlsby, N. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:2010.11929v1.
- Liu, W.; Quijano, K.; Crawford, M.M. YOLOv5-Tassel: Detecting Tassels in RGB UAV Imagery with Improved YOLOv5 Based on Transfer Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8085–8094.
- Chen, X.; Yan, B.; Zhu, J.; Wang, D.; Yang, X.; Lu, H. Transformer Tracking. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 2 November 2021; pp. 8122–8131.
- Li, C.; Xue, W.; Jia, Y.; Qu, Z.; Luo, B.; Tang, J. LasHeR: A Large-scale High-diversity Benchmark for RGBT Tracking. arXiv 2021, arXiv:2104.13202v2.
- Li, C.; Cheng, H.; Hu, S.; Liu, X.; Tang, J.; Lin, L. Learning Collaborative Sparse Representation for Grayscale-Thermal Tracking. IEEE Trans. Image Process. 2016, 25, 5743–5756.
- Li, C.; Liang, X.; Lu, Y.; Zhao, N.; Tang, J. RGB-T Object Tracking: Benchmark and Baseline. Pattern Recognit. 2019, 96, 106977.
- Li, C.; Zhao, N.; Lu, Y.; Zhu, C.; Tang, J. Weighted Sparse Representation Regularized Graph Learning for RGB-T Object Tracking. In Proceedings of the Acm on Multimedia Conference, Bucharest, Romania, 6–9 June 2017; pp. 1856–1864.
- Zhang, P.; Zhao, J.; Wang, D.; Lu, H.; Yang, X. Jointly Modeling Motion and Appearance Cues for Robust RGB-T Tracking. arXiv 2020, arXiv:2007.02041.
- Wang, S.; Zhou, Y.; Yan, J.; Deng, Z. Fully Motion-Aware Network for Video Object Detection. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018.
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
602
Revisions:
3 times
(View History)
Update Date:
18 Jan 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No