Forests are crucial ecosystems that provide numerous benefits to the environment and its inhabitants. They filter air and water, provide food and shelter for animals, and play a crucial role in regulating the climate. However, global warming and human error have increased the incidence of forest wildfires, which can cause significant damage to the environment, property, and human health. Once an ignition starts, it is essential to declare it as soon as possible so that it can be rapidly controlled and suppressed. Researchers have focused on providing first responders, firefighters, and decision makers with systems for analyzing the situation at a glance through visual analytics techniques
[1][2][3][4], sharing data
[1], or systems that involve active citizenship for early warning
[5][6]. However, wildland firefighters often do not have access to accurate and real-time information about the situation because the location of the fire is remote or hard to reach, and if the fire is not brought under control in time, it can continue to grow, increasing the danger and the suppression costs. Detecting and controlling wildfires is a challenging task, as they can spread rapidly and are difficult to anticipate. Researchers are exploring the use of advanced technologies such as IoT, robotics, and drone technologies
[7]. The synergy of these technologies converges in a new trend that can be called the Internet of Robotics and Drone Things
[8]. The interconnection of all these heterogeneous devices and the integration with software components has led to the design and development of a Cyber-Physical System (CPS) for wildfire detection
[9] and collaborative robots able to navigate autonomously and perform fire attacks on wildland fires before they burn out of control. However, there remains a significant challenge in providing accurate and real-time information to ground control stations and operators overseeing fleets of drones in collaborative environments. In
[10], the authors introduce a human–machine interface that enables a ground control station to remotely monitor and manage a fleet of drones in a collaborative environment, with the involvement of multiple operators. Collaborative robots, also defined as unmanned systems, have the capability to execute a mission autonomously without human intervention, and commonly they include unmanned aircraft and ground robots
[11].
2. IoT Forest Fire Systems
In recent years, with global temperature rise, extreme weather, and climate events, especially droughts, wildfires are a natural phenomenon that has increased in frequency and magnitude over the past decade, causing damage to life and property, and impacting climate and air quality
[12]. The wildfire season has lengthened in many countries due to shifting climate patterns. Studies report that the number of wildfires has declined, thanks to the strict and full implementation of forest fire prevention and management strategies and the philosophy of forest protection and green development in the world; however, climate warming will continue in the world, leading to the more frequent occurrence of dry thunderstorms, increased number of days with forest fire alerts, higher fire risks, and greater challenges in forest fire prevention
[13]. Therefore, we must strengthen studies on the impacts of climate change on forest fires; improve the monitoring, prediction, and alert system for forest fires; and raise public awareness and knowledge of forest fire prevention
[14]. To minimize their impact, effective prevention, early warning, and response approaches are needed. Research is ongoing to develop high-accuracy fire detection systems for challenging environments
[15]. Traditionally, forest fires were mainly detected by human observation from fire lookout towers and involved only primitive tools, such as the Osborne fire Finder
[16], which is a tool consisting of a card topographic printed on a disc with edge graduated. Unfortunately, these primary techniques are inefficient due to the unreliability of human observation towers and difficult living conditions. Advanced technologies such as satellites, UAV, UGV, ground-based sensor nodes, and camera systems supplement traditional firefighting techniques, focusing on detecting wildfires at early stages, and predicting hot spots by combining all the methods for a robust fire monitoring system
[17]. Cyber-Physical Systems (CPSs), which integrate computing and control technologies into physical systems aim to contribute to real-time wildfire detection through the Internet of Things (IoT) wireless sensor
[18] and the use of a collaborative unmanned system
[11].
In the past few years, IoT has been gaining significant attention in various fields, including forest fire detection. IoT technologies are very useful in forest management systems because they can provide real-time monitoring of forest conditions, such as temperature, humidity, and wind speed. These data can be used to predict the likelihood of a wildfire, to detect a fire, and to track the progression of an active fire. This kind of technology is also called the Internet of Forest Things (IoFT)
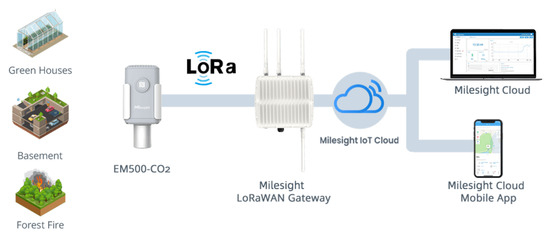
[19]. The Milesight Company is an example of a company that has developed a technology to detect and prevent forest fires using an IoT system (
Figure 1). The system is comprised of:
Figure 1. Architecture of forest fire detection.
-
IoT nodes: A microcontroller unit connected with carbon dioxide, barometric pressure, temperature, and humidity sensors.
-
Gateway: A central hub that connects and manages the various sensors and devices, is able to collect data from IoT nodes, transmit it to the cloud, and perform edge computing tasks.
-
Cloud: A remote server that provides a scalable and flexible platform used to process, and analyze the data collected by the sensors, but also used to store data, provides visualization and reporting tools and enables integration with other systems for enhanced capabilities.
Typically, the IoT nodes used in this type of application employ Low-Power Wide-Area Network (LPWAN) technologies, such as LoRa and Sigfox, to enable long-range communication with a battery life that can last for several years. This allows for coverage of an entire forest at a cost-effective price. Additionally, the use of unmanned systems offers many advantages, including the ability to cover large areas in any weather condition, operate during both day and night with extended flight duration, be quickly recovered and relatively cost-effective compared to other methods, carry various payloads for different missions within a single flight, and efficiently cover larger and specific target areas
[20]. UAVs equipped with computer vision-based remote sensing systems are becoming a more practical option for forest fire surveillance and detection due to their low cost, safety, mobility, and rapid response characteristics
[21]. Unmanned Aerial Vehicles (UAVs) based on computer vision fire detection can provide immediate information on the fire spots but are also equipped with a dropping mechanism used to target and shoot the fire by releasing extinguishing balls
[22][23]. Popular real-time object detection systems, such as YOLO can be integrated into UAVs, providing real-time monitoring of large forest areas and detecting fires at an early stage, reducing the risk of the fire spreading
[24]. Consequently, numerous research studies have been conducted in recent years to develop UAV-based forest fire monitoring and detection applications based on YOLO
[25][26][27]. In addition, autonomous ground systems such as the UGV are essential in responding to wildfire emergencies. Equipped with advanced technologies such as computer vision, infrared and depth cameras, and other sensors, UGVs can be used for detecting and extinguishing fires
[28][29][30], as well as cooperating with other systems such as UAVs
[31]. These robots can perform tasks on land without human intervention and access difficult-to-reach areas that may be too hazardous for human firefighters.
Forest fire monitoring and detection applications using Unmanned Aerial Vehicles (UAVs) have received significant attention in recent years, with a particular focus on employing the You Only Look Once (YOLO) algorithm for object detection
[25][26][27]. These studies have demonstrated the effectiveness of UAVs in providing aerial surveillance and timely fire detection capabilities. Furthermore, autonomous ground systems such as Unmanned Ground Vehicles (UGVs) have emerged as crucial elements in responding to wildfire emergencies, leveraging advanced technologies such as computer vision, infrared and depth cameras, and other sensors
[28][29][30]. UGVs are capable of detecting and extinguishing fires and collaborating with UAVs to access hazardous or hard-to-reach areas that pose risks to human firefighters
[31]. Object detection algorithms play a critical role in fire detection systems as they enable real-time identification and localization of fire incidents. The You Only Look Once (YOLO) family of object detection algorithms has proven highly effective and efficient in computer vision applications. Notably, YOLOv4 (
https://blog.roboflow.com/a-thorough-breakdown-of-yolov4/, accessed on 19 April 2023) and YOLOv5 (
https://blog.roboflow.com/yolov5-improvements-and-evaluation/, accessed on 19 April 2023) stand out as prominent versions, each offering distinct advantages for different components as shown in
Table 1.
Table 1. Comparison of YOLOv4 and YOLOv5.
 +1 credit
+1 credit