The increasing frequency and severity of forest fires necessitate early detection and rapid response to mitigate their impact. This project aims to design a cyber-physical system for early detection and rapid response to forest fires using advanced technologies. The system incorporates Internet of Things sensors and autonomous unmanned aerial and ground vehicles controlled by the robot operating system. An IoT-based wildfire detection node continuously monitors environmental conditions, enabling early fire detection. Upon fire detection, a UAV autonomously surveys the area to precisely locate the fire and can deploy an extinguishing payload or provide data for decision-making. The UAV communicates the fire's precise location to a collaborative UGV, which autonomously reaches the designated area to support ground-based firefighters. The CPS includes a ground control station with web-based dashboards for real-time monitoring of system parameters and telemetry data from UAVs and UGVs. The areaticle demonstrates the real-time fire detection capabilities of the proposed system are demonstrated using simulated forest fire scenarios. The objective is to provide a practical approach using open-source technologies for early detection and extinguishing of forest fires, with potential applications in various industries, surveillance, and precision agriculture.
- CPS
- IoT
- IoRT
- UAV
- UGV
- ROS
- PX4 Autopilot
- wildfire
- fire detection
- Node-RED
- MQTT
- YOLO
1. Introduction
2. IoT ForRest Fire Systemslated Work
In recent years, with global temperature rise, extreme weather, and climate events, especially droughts, wildfires are a natural phenomenon that has increased in frequency and magnitude over the past decade, causing damage to life and property, and impacting climate and air quality [12][17]. The wildfire season has lengthened in many countries due to shifting climate patterns. Studies report that the number of wildfires has declined, thanks to the strict and full implementation of forest fire prevention and management strategies and the philosophy of forest protection and green development in the world; however, climate warming will continue in the world, leading to the more frequent occurrence of dry thunderstorms, increased number of days with forest fire alerts, higher fire risks, and greater challenges in forest fire prevention [13][18]. Therefore, we must strengthen studies on the impacts of climate change on forest fires; improve the monitoring, prediction, and alert system for forest fires; and raise public awareness and knowledge of forest fire prevention [14][19]. To minimize their impact, effective prevention, early warning, and response approaches are needed. Research is ongoing to develop high-accuracy fire detection systems for challenging environments [15][20]. Traditionally, forest fires were mainly detected by human observation from fire lookout towers and involved only primitive tools, such as the Osborne fire Finder [16][21], which is a tool consisting of a card topographic printed on a disc with edge graduated. Unfortunately, these primary techniques are inefficient due to the unreliability of human observation towers and difficult living conditions. Advanced technologies such as satellites, UAV, UGV, ground-based sensor nodes, and camera systems supplement traditional firefighting techniques, focusing on detecting wildfires at early stages, and predicting hot spots by combining all the methods for a robust fire monitoring system [17][22]. Cyber-Physical Systems (CPSs), which integrate computing and control technologies into physical systems aim to contribute to real-time wildfire detection through the Internet of Things (IoT) wireless sensor [18][23] and the use of a collaborative unmanned system [11]. In the past few years, IoT has been gaining significant attention in various fields, including forest fire detection. IoT technologies are very useful in forest management systems because they can provide real-time monitoring of forest conditions, such as temperature, humidity, and wind speed. These data can be used to predict the likelihood of a wildfire, to detect a fire, and to track the progression of an active fire. This kind of technology is also called the Internet of Forest Things (IoFT) [19][24]. The Milesight Company is an example of a company that has developed a technology to detect and prevent forest fires using an IoT system (Figure 1). The system is comprised of: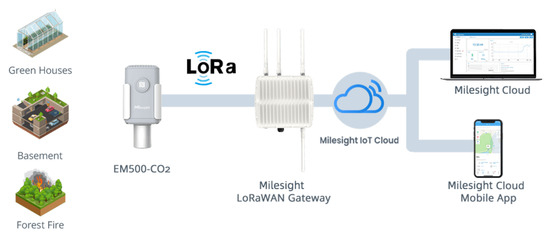
-
IoT nodes: A microcontroller unit connected with carbon dioxide, barometric pressure, temperature, and humidity sensors.
-
Gateway: A central hub that connects and manages the various sensors and devices, is able to collect data from IoT nodes, transmit it to the cloud, and perform edge computing tasks.
-
Cloud: A remote server that provides a scalable and flexible platform used to process, and analyze the data collected by the sensors, but also used to store data, provides visualization and reporting tools and enables integration with other systems for enhanced capabilities.
| Feature | YOLOv4 | YOLOv5 |
|---|---|---|
| Architecture | Utilizes a complex architecture with a CSPDarknet53 backbone, which includes multiple convolutional layers and skip connections. | Introduces a simplified architecture that focuses on efficiency and speed. Replaces the CSPDarknet53 backbone with a smaller and more streamlined CSPNet-based architecture. |
| Model Size and Speed | Larger model size, requiring more computational resources. Provides slightly slower inference times compared to YOLOv3. | Smaller model size, achieving faster inference times without compromising much on accuracy. |
| Performance | Aims to improve object detection performance by introducing various techniques, such as PANet, SAM, and PAN. Achieves state-of-the-art accuracy on popular object detection benchmarks. | Aims to improve object detection performance by introducing various techniques, such as PANet, SAM, and PAN. Achieves state-of-the-art accuracy on popular object detection benchmarks. |
| Training Approach | Adopts a traditional single-stage object detection training approach, utilizing anchor boxes and predefined anchor scales. Employs the focal loss function to address class imbalance issues. | Introduces a new approach called “Generalized Anchors,” which adapts anchor sizes during training. Incorporates a focal loss function and implements a novel loss function called “CIoU loss” to improve localization accuracy. |
| Availability | Open-source implementation widely used and supported by the computer vision community. Available as a publicly accessible codebase. | Open-source implementation is gaining popularity due to improved speed and efficiency. Codebase is publicly available, allowing researchers and developers to utilize and contribute to its development. |