 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Attai Ibrahim Abubakar | -- | 6489 | 2023-07-17 03:47:34 | | | |
| 2 | Rita Xu | -31 word(s) | 6458 | 2023-07-17 04:25:44 | | | | |
| 3 | Rita Xu | -9 word(s) | 6449 | 2023-07-17 04:31:57 | | |
Video Upload Options
Wireless communication networks have been witnessing unprecedented demand due to the increasing number of connected devices and emerging bandwidth-hungry applications. Although there are many competent technologies for capacity enhancement purposes, such as millimeter wave communications and network densification, there is still room and need for further capacity enhancement in wireless communication networks, especially for the cases of unusual people gatherings, such as sport competitions, musical concerts, etc. Unmanned aerial vehicles (UAVs) have been identified as one of the promising options to enhance capacity due to their easy implementation, pop-up fashion operation, and cost-effective nature. The main idea is to deploy base stations on UAVs and operate them as flying base stations, thereby bringing additional capacity where it is needed. However, UAVs mostly have limited energy storage, hence, their energy consumption must be optimized to increase flight time.
1. Introduction
2. Types of UAVs
3. UAV Power Supply and Charging Mechanisms
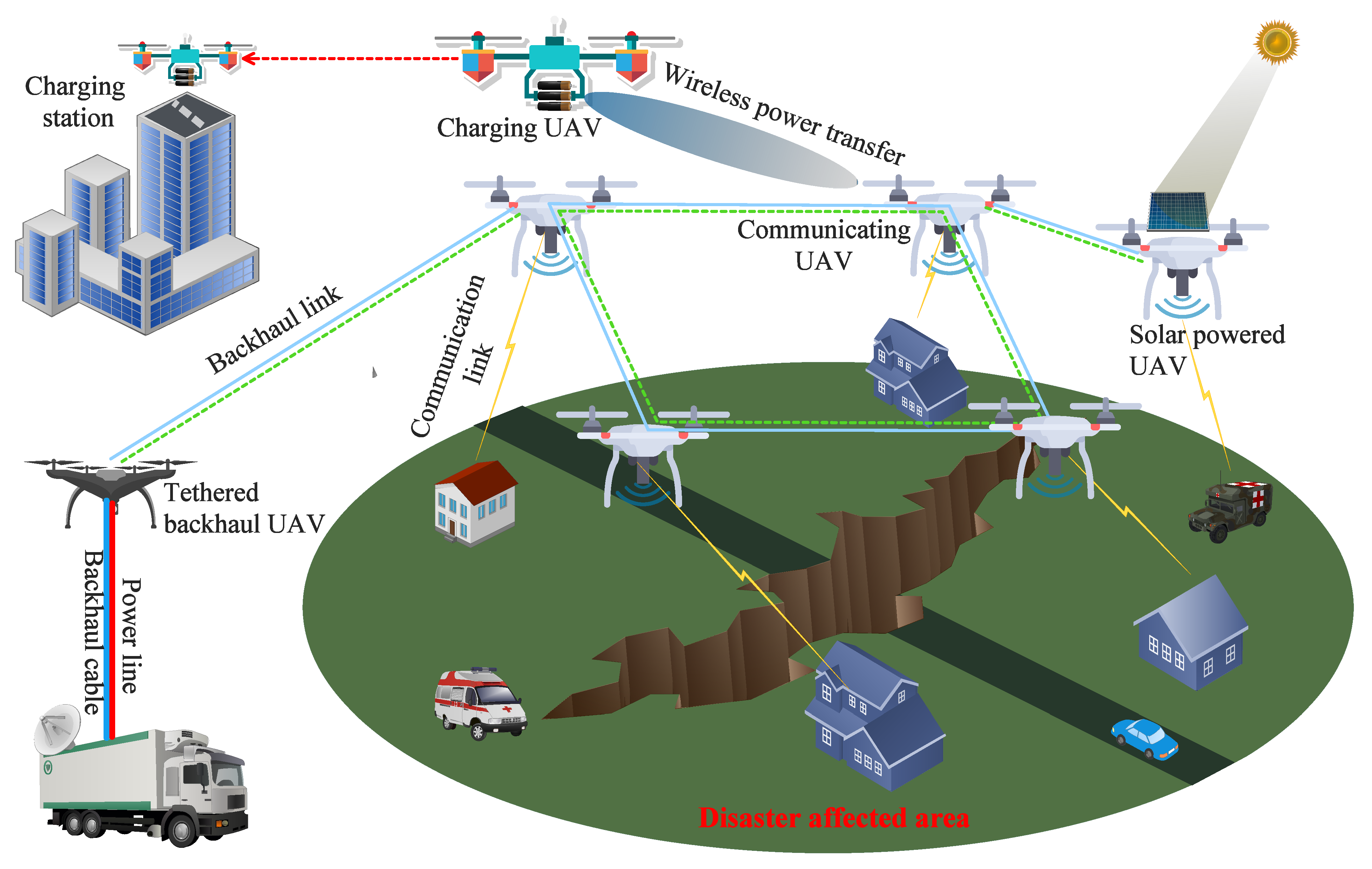
3.1. Battery Powered UAVs
3.1.1. Battery Swapping
3.1.2. Laser Beam Charging
3.1.3. Wireless Power Transfer/Wireless Charging
3.2. Grid Powered UAVs: Tethering
3.3. Fuel Cell-Powered UAVs
3.4. Renewable Energy Powered UAVs
3.5. Hybrid Powered UAVs
3.5.1. Fuel Cell-Battery
3.5.2. Solar Cells plus Battery
4. The Role of UAV-Base Station in Wireless Communications
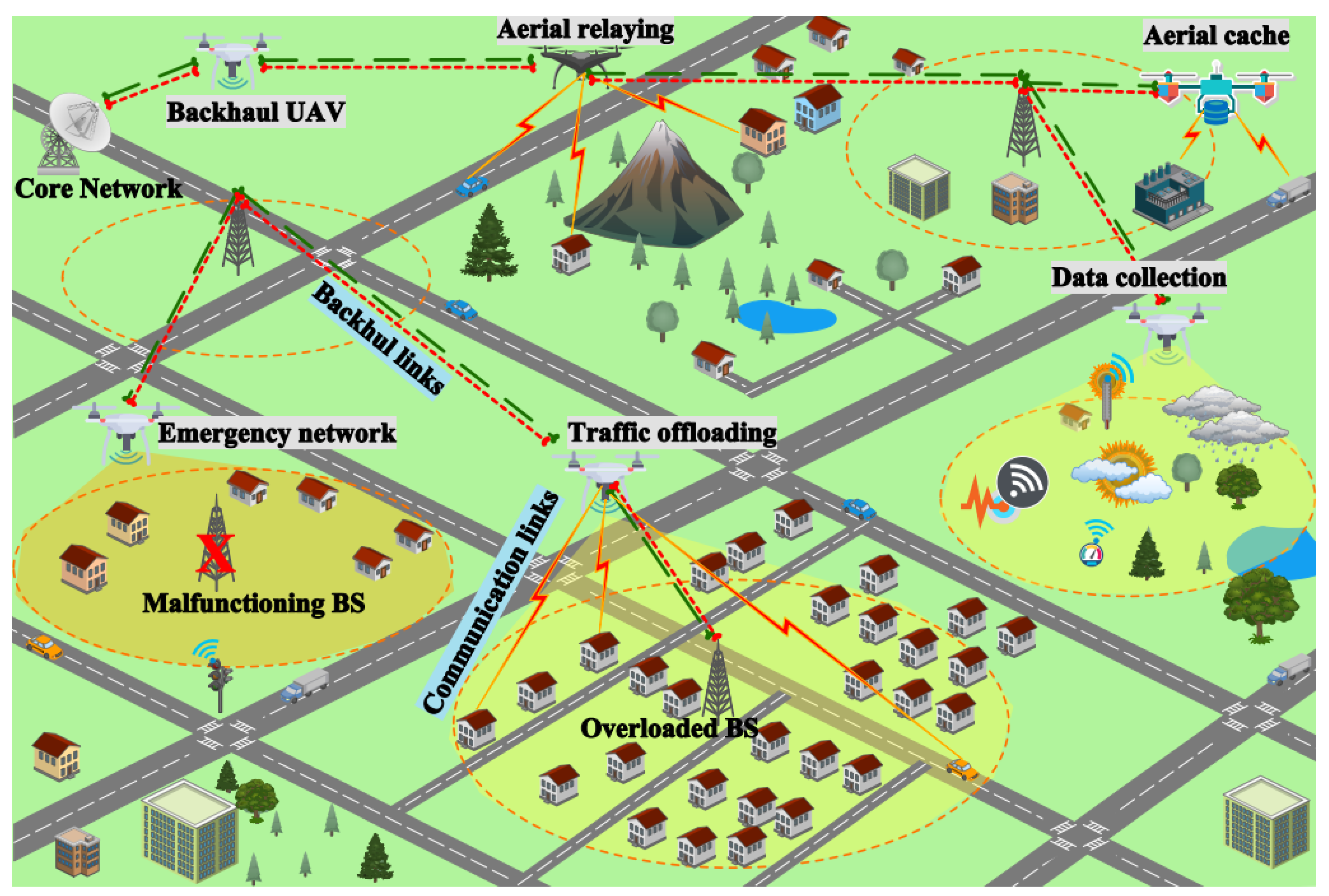
4.1. Emergency Services (Pop-Up Networks)
4.2. Data Harvesting from IoT Devices
4.3. Content Caching and Computation Offloading
4.4. Load Balancing
4.5. Coverage Extension/Relaying
4.6. Capacity/Throughput Enhancement
4.7. Backhauling
4.8. Energy Efficiency
5. Types of Energy Optimization in UAV-Based Cellular Networks
5.1. Optimization of the Propulsion Energy
5.2. Optimization of the Communication Energy
5.3. Joint Optimization of the Communication and Propulsion Energy
5.4. Optimization of the Energy Consumption in UAV-Assisted Cellular Networks
References
- Ali, R.; Zikria, Y.B.; Bashir, A.K.; Garg, S.; Kim, H.S. URLLC for 5G and Beyond: Requirements, Enabling Incumbent Technologies and Network Intelligence. IEEE Access 2021, 9, 67064–67095.
- Chettri, L.; Bera, R. A Comprehensive Survey on Internet of Things (IoT) Toward 5G Wireless Systems. IEEE Internet Things J. 2020, 7, 16–32.
- Ericsson. Ericsson Mobility Report; Technical report; Ericsson: Stockholm, Sweden, 2021.
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The Road Towards 6G: A Comprehensive Survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366.
- Alwis, C.D.; Kalla, A.; Pham, Q.V.; Kumar, P.; Dev, K.; Hwang, W.J.; Liyanage, M. Survey on 6G Frontiers: Trends, Applications, Requirements, Technologies and Future Research. IEEE Open J. Commun. Soc. 2021, 2, 836–886.
- Sun, Y.; Liu, J.; Wang, J.; Cao, Y.; Kato, N. When Machine Learning Meets Privacy in 6G: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2694–2724.
- Mao, B.; Tang, F.; Kawamoto, Y.; Kato, N. AI Models for Green Communications Towards 6G. IEEE Commun. Surv. Tutor. 2021.
- Saadi, M. 6G: The Network of Technology Convergence; Technical report; ABI Research: Oyster Bay, NY, USA, 2022.
- Wang, X.; Zhou, Z.; Yang, Z.; Liu, Y.; Peng, C. Spatio-temporal analysis and prediction of cellular traffic in metropolis. In Proceedings of the 2017 IEEE 25th International Conference on Network Protocols (ICNP), Toronto, ON, Canada, 10–13 October 2017; pp. 1–10.
- Ozturk, M.; Abubakar, A.I.; Nadas, J.P.B.; Rais, R.N.B.; Hussain, S.; Imran, M.A. Energy Optimization in Ultra-Dense Radio Access Networks via Traffic-Aware Cell Switching. IEEE Trans. Green Commun. Netw. 2021, 5, 832–845.
- Barlacchi, G.; De Nadai, M.; Larcher, R.; Casella, A.; Chitic, C.; Torrisi, G.; Antonelli, F.; Vespignani, A.; Pentland, A.; Lepri, B. A multi-source dataset of urban life in the city of Milan and the Province of Trentino. Sci. Data 2015, 2, 150055.
- Abubakar, A.I.; Mollel, M.S.; Ozturk, M.; Hussain, S.; Imran, M.A. A lightweight cell switching and traffic offloading scheme for energy optimization in ultra-dense heterogeneous networks. Phys. Commun. 2022, 52, 101643.
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360.
- Klaine, P.V.; Nadas, J.P.B.; Souza, R.D.; Imran, M.A. Distributed Drone Base Station Positioning for Emergency Cellular Networks Using Reinforcement Learning. Cogn. Comput. 2018, 10, 790–804.
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442.
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2010.
- Saeed, A.S.; Younes, A.B.; Islam, S.; Dias, J.; Seneviratne, L.; Cai, G. A review on the platform design, dynamic modeling and control of hybrid UAVs. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Colorado, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 806–815.
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035.
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823.
- Khofiyah, N.A.; Maret, S.; Sutopo, W.; Nugroho, B.D.A. Goldsmith’s Commercialization Model for Feasibility Study of Technology Lithium Battery Pack Drone. In Proceedings of the 2018 5th International Conference on Electric Vehicular Technology (ICEVT), Surakarta, Indonesia, 30–31 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 147–151.
- Verstraete, D.; Lehmkuehler, K.; Wong, K. Design of a fuel cell powered blended wing body UAV. In ASME International Mechanical Engineering Congress and Exposition; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 45172, pp. 621–629.
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as mobile infrastructure: Addressing battery lifetime. IEEE Commun. Mag. 2019, 57, 132–137.
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124.
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power supply architectures for drones-a review. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 5826–5831.
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855.
- Hassan, J.; Bokani, A.; Kanhere, S.S. Recharging of Flying Base Stations using Airborne RF Energy Sources. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference Workshop (WCNCW), Marrakech, Morocco, 15–18 April 2019; pp. 1–6.
- Kishk, M.A.; Bader, A.; Alouini, M.S. On the 3-D placement of airborne base stations using tethered UAVs. IEEE Trans. Commun. 2020, 68, 5202–5215.
- Gu, B.W.; Choi, S.Y.; Choi, Y.S.; Cai, G.; Seneviratne, L.; Rim, C.T. Novel roaming and stationary tethered aerial robots for continuous mobile missions in nuclear power plants. Nucl. Eng. Technol. 2016, 48, 982–996.
- Bushnaq, O.M.; Kishk, M.A.; Celik, A.; Alouini, M.S.; Al-Naffouri, T.Y. Optimal deployment of tethered drones for maximum cellular coverage in user clusters. IEEE Trans. Wirel. Commun. 2020, 20, 2092–2108.
- Matracia, M.; Kishk, M.A.; Alouini, M.S. On the Topological Aspects of UAV-Assisted Post-Disaster Wireless Communication Networks. arXiv 2021, arXiv:2109.13671.
- Hwang, J.J.; Kuo, J.K.; Wu, W.; Chang, W.R.; Lin, C.H.; Wang, S.E. Lifecycle performance assessment of fuel cell/battery electric vehicles. Int. J. Hydrogen Energy 2013, 38, 3433–3446.
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485.
- Kendall, K.; Pollet, B. 4.12-Hydrogen and Fuel Cells in Transport. Compr. Renew. Energy 2012, 4, 301.
- Rhoads, G.; Bradley, T.; Wagner, N.; Taylor, B.; Keen, D. Design and flight test results for a 24 h fuel cell unmanned aerial vehicle. In Proceedings of the 8th Annual International Energy Conversion Engineering Conference, Nashville, TN, USA, 25–28 July 2010; p. 6690.
- Richardson, P.L. Upwind dynamic soaring of albatrosses and UAVs. Prog. Oceanogr. 2015, 130, 146–156.
- Bonnin, V.; Bénard, E.; Moschetta, J.M.; Toomer, C. Energy-harvesting mechanisms for UAV flight by dynamic soaring. Int. J. Micro Air Veh. 2015, 7, 213–229.
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Lotz, R.; Siebenmann, D.; Leutenegger, S.; Alexis, K.; Siegwart, R. A solar-powered hand-launchable UAV for low-altitude multi-day continuous flight. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 3986–3993.
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819.
- Belmonte, N.; Staulo, S.; Fiorot, S.; Luetto, C.; Rizzi, P.; Baricco, M. Fuel cell powered octocopter for inspection of mobile cranes: Design, cost analysis and environmental impacts. Appl. Energy 2018, 215, 556–565.
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298.
- Verstraete, D.; Harvey, J.R.; Palmer, J.L. Hardware-in-the-loop simulation of fuel-cell-based hybrid-electrical UAV propulsion. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; Volume 4, pp. 2662–2674.
- Gong, A.; Verstraete, D. Role of battery in a hybrid electrical fuel cell UAV propulsion system. In Proceedings of the 52nd AIAA Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014.
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless charging techniques for UAVs: A review, reconceptualization, and extension. IEEE Access 2018, 6, 29865–29884.
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2460–2466.
- Shiau, J.K.; Ma, D.M.; Yang, P.Y.; Wang, G.F.; Gong, J.H. Design of a solar power management system for an experimental UAV. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1350–1360.
- Sambo, Y.A.; Klaine, P.V.; Nadas, J.P.B.; Imran, M.A. Energy Minimization UAV Trajectory Design for Delay-Tolerant Emergency Communication. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6.
- Jin, W.; Yang, J.; Fang, Y.; Feng, W. Research on Application and Deployment of UAV in Emergency Response. In Proceedings of the 2020 IEEE 10th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 17–19 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 277–280.
- Deepak, G.C.; Ladas, A.; Sambo, Y.A.; Pervaiz, H.; Politis, C.; Imran, M.A. An Overview of Post-Disaster Emergency Communication Systems in the Future Networks. IEEE Wirel. Commun. 2019, 26, 132–139.
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091.
- Singh, S.; Malik, A.; Kumar, R.; Singh, P.K. A proficient data gathering technique for unmanned aerial vehicle-enabled heterogeneous wireless sensor networks. Int. J. Commun. Syst. 2021, 34, e4956.
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349.
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619.
- Feng, T.; Xie, L.; Yao, J.; Xu, J. UAV-Enabled Data Collection for Wireless Sensor Networks with Distributed Beamforming. IEEE Trans. Wirel. Commun. 2021.
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. UAV Path Planning for Wireless Data Harvesting: A Deep Reinforcement Learning Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Virtual, 7–11 December 2020; pp. 1–6.
- Liu, Y.; Dai, H.N.; Wang, H.; Imran, M.; Wang, X.; Shoaib, M. UAV-enabled data acquisition scheme with directional wireless energy transfer for Internet of Things. Comput. Commun. 2020, 155, 184–196.
- Liu, D.; Chen, B.; Yang, C.; Molisch, A.F. Caching at the wireless edge: Design aspects, challenges, and future directions. IEEE Commun. Mag. 2016, 54, 22–28.
- Dai, H.; Zhang, L.; Bian, H.; Wang, B. UAV relaying assisted transmission optimization with caching in vehicular networks. Phys. Commun. 2020, 43, 101214.
- Wu, H.; Lyu, F.; Zhou, C.; Chen, J.; Wang, L.; Shen, X. Optimal UAV Caching and Trajectory in Aerial-Assisted Vehicular Networks: A Learning-Based Approach. IEEE J. Sel. Areas Commun. 2020, 38, 2783–2797.
- Mach, P.; Becvar, Z. Mobile Edge Computing: A Survey on Architecture and Computation Offloading. IEEE Commun. Surv. Tutor. 2017, 19, 1628–1656.
- Cui, Y.; Zheng, J.; Wang, X.; Diao, X.; Cai, Y.; Liu, S. UAV-enabled MEC system: Locations and coverage optimization. In Proceedings of the IET 8th International Conference on Wireless, Mobile Multimedia Networks, Beijing, China, 12–15 October 2019; pp. 12–18.
- Wang, H.; Ke, H.; Sun, W. Unmanned-Aerial-Vehicle-Assisted Computation Offloading for Mobile Edge Computing Based on Deep Reinforcement Learning. IEEE Access 2020, 8, 180784–180798.
- Sanike, A.; Subramanyam, A.; Reddy, S.S.S.; RaghuRam, G. Load balancing technique to handle the congestion in the communication networks. In Proceedings of the 2015 Conference on Power, Control, Communication and Computational Technologies for Sustainable Growth (PCCCTSG), Kurnool, India, 11–12 December 2015; pp. 289–293.
- Bor-Yaliniz, I.; Yanikomeroglu, H. The New Frontier in RAN Heterogeneity: Multi-Tier Drone-Cells. IEEE Commun. Mag. 2016, 54, 48–55.
- Hu, J.; Zhang, H.; Liu, Y.; Li, X.; Ji, H. An Intelligent UAV Deployment Scheme for Load Balance in Small Cell Networks Using Machine Learning. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6.
- Fan, Q.; Ansari, N. Towards Traffic Load Balancing in Drone-Assisted Communications for IoT. IEEE Internet Things J. 2019, 6, 3633–3640.
- Saxena, V.; Jaldén, J.; Klessig, H. Optimal UAV Base Station Trajectories Using Flow-Level Models for Reinforcement Learning. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 1101–1112.
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661.
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Sydney, Australia, 8–12 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2898–2904.
- Jaziri, A.; Nasri, R.; Chahed, T. Congestion mitigation in 5G networks using drone relays. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 233–238.
- Zhan, P.; Yu, K.; Swindlehurst, A.L. Wireless relay communications with unmanned aerial vehicles: Performance and optimization. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2068–2085.
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for mobile relaying systems. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6.
- Li, Y.; Yang, D.; Xu, Y.; Xiao, L.; Chen, H. Throughput maximization for UAV-enabled relaying in wireless powered communication networks. Sensors 2019, 19, 2989.
- Zaidi, S.K.; Hasan, S.F.; Gui, X.; Siddique, N.; Ahmad, S. Exploiting UAV as NOMA based Relay for Coverage Extension. In Proceedings of the 2019 2nd International Conference on Computer Applications Information Security (ICCAIS), Riyadh, Saudi Arabia, 1–3 May 2019; pp. 1–5.
- You, X.; Wang, C.X.; Huang, J.; Gao, X.; Zhang, Z.; Wang, M.; Huang, Y.; Zhang, C.; Jiang, Y.; Wang, J.; et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts. Sci. China Inf. Sci. 2021, 64, 1–74.
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142.
- Sharma, V.; Bennis, M.; Kumar, R. UAV-assisted heterogeneous networks for capacity enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210.
- Song, Q.; Zheng, F.C.; Jin, S. Multiple UAVs Enabled Data Offloading for Cellular Hotspots. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6.
- Challita, U.; Saad, W. Network Formation in the Sky: Unmanned Aerial Vehicles for Multi-Hop Wireless Backhauling. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6.
- Gapeyenko, M.; Petrov, V.; Moltchanov, D.; Andreev, S.; Himayat, N.; Koucheryavy, Y. Flexible and Reliable UAV-Assisted Backhaul Operation in 5G mmWave Cellular Networks. IEEE J. Sel. Areas Commun. 2018, 36, 2486–2496.
- Khallaf, H.S.; Uysal, M. Comprehensive study on UAV-based FSO links for high-speed train backhauling. Appl. Opt. 2021, 60, 8239–8247.
- Alsharoa, A.; Ghazzai, H.; Kadri, A.; Kamal, A.E. Energy management in cellular hetnets assisted by solar powered drone small cells. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6.
- Chang, W.; Meng, Z.T.; Liu, K.C.; Wang, L.C. Energy-Efficient Sleep Strategy for the UBS-Assisted Small-Cell Network. IEEE Trans. Veh. Technol. 2021, 70, 5178–5183.
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021.
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42.
- Zeng, Y.; Xu, J.; Zhang, R. Energy Minimization for Wireless Communication With Rotary-Wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345.
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication With Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760.
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394.
- Wu, Y.; Yang, W.; Guan, X.; Wu, Q. Energy-Efficient Trajectory Design for UAV-Enabled Communication Under Malicious Jamming. IEEE Wirel. Commun. Lett. 2021, 10, 206–210.
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437.
- Wang, L.; Hu, B.; Chen, S.; Cui, J. UAV-enabled reliable mobile relaying based on downlink NOMA. IEEE Access 2020, 8, 25237–25248.
- You, J.; Jung, S.; Seo, J.; Kang, J. Energy-Efficient 3-D Placement of an Unmanned Aerial Vehicle Base Station With Antenna Tilting. IEEE Commun. Lett. 2020, 24, 1323–1327.
- Plachy, J.; Becvar, Z. Energy Efficient Positioning of Flying Base Stations via Coulomb’s law. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6.
- Faqir, O.J.; Kerrigan, E.C.; Gündüz, D. Joint optimization of transmission and propulsion in aerial communication networks. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 3955–3960.
- Li, T.; Sheng, M.; Lyu, R.; Liu, J.; Li, J. UAV assisted heterogeneous wireless networks: Potentials and challenges. ZTE Commun. 2018, 16.
- Shehzad, M.K.; Akhtar, M.W.; Hassan, S.A. Performance of mmWave UAV-Assisted 5G Hybrid Heterogeneous Networks. Auton. Airborne Wirel. Netw. 2021, 97–118.
- Chakareski, J.; Naqvi, S.; Mastronarde, N.; Xu, J.; Afghah, F.; Razi, A. An Energy Efficient Framework for UAV-Assisted Millimeter Wave 5G Heterogeneous Cellular Networks. IEEE Trans. Green Commun. Netw. 2019, 3, 37–44.

