Wireless communication networks have been witnessing unprecedented demand due to the increasing number of connected devices and emerging bandwidth-hungry applications. Although there are many competent technologies for capacity enhancement purposes, such as millimeter wave communications and network densification, there is still room and need for further capacity enhancement in wireless communication networks, especially for the cases of unusual people gatherings, such as sport competitions, musical concerts, etc. Unmanned aerial vehicles (UAVs) have been identified as one of the promising options to enhance capacity due to their easy implementation, pop-up fashion operation, and cost-effective nature. The main idea is to deploy base stations on UAVs and operate them as flying base stations, thereby bringing additional capacity where it is needed. However, UAVs mostly have limited energy storage, hence, their energy consumption must be optimized to increase flight time.
- wireless communications
- cellular networks
- energy optimization
- UAVs
1. Introduction
2. Types of UAVs
UAVs, also known as drones, are of two main categories: fixed-wing and rotary-wing. However, with the advancement in UAV technology and the wide range of applications of UAVs, rotary-, and fixed-wing UAVs can be combined to form a hybrid design [15]. Rotary-wing UAVs are designed to perform vertical take-offs and landings. One of the main design features of rotary-wing UAVs is that they can hover on a fixed and specified location, making them perfect candidates to perform tasks such as continuous cellular coverage and sensing [15]. However, rotary-wing UAVs consume more energy since they operate at a low altitude with little mobility, and their constant flight against gravity results in greater power consumption [15]. Fixed-wing UAVs are another type of UAV that can glide through the air and operate at higher altitudes, making them more energy efficient and capable of carrying heavier payloads. Moreover, fixed-wing UAVs, such as tiny planes, have heavier weights, faster speeds, and must move forward to stay airborne [13]. However, fixed-wing UAVs require a runway for landing and take-off and are more expensive than rotary-wing UAVs [16]. The limitations of both rotary-, and fixed-wing UAVs led to the emergence of a new type of UAV in terms of shape and aerodynamics, called hybrid UAVs [17]. The fundamental design strategy behind the hybrid ones is to combine the design features of both rotary-, and fixed-wing UAVs. Hybrid UAVs employ different features of both rotary and fixed-wings for various maneuvers and flights dynamics. These UAVs can perform vertical takeoff and landing (VTOL) in copter mode and shift to high-speed forward flight in aeroplane mode [18]. For example, a parrot swing UAV [15], which is an improved version of the traditional four-arm quadcopter (a rotary-wing UAV), has been equipped with some fixed-wing UAV features. As such, it can take off vertically quickly, hover, and fly horizontally at supersonic speed.3. UAV Power Supply and Charging Mechanisms
In recent years, there has been an increase in the application of UAVs in both commercial and military domains, due to their easy adaptability, the flexibility of deployment, and cost-effectiveness [13]. However, to fully exploit the capabilities of UAVs in different application domains, there is a need to consider the challenges and limitations of UAVs. One of the most important limitations in UAVs is power and energy consumption [15]. Commercial UAVs are usually powered with rechargeable batteries for operations, while large UAVs, such as military UAVs, use non-renewable resources, such as fuel and gas, to provide more energy to the UAV for longer flight time. In recent years, new and alternative methods for UAV power supply, including solar energy, wireless charging, laser beam charging systems, etc., have been developed and tested [19]. The different methods of power supply and charging mechanisms for UAVs while Figure 1 illustrates various UAV power supply and charging mechanisms.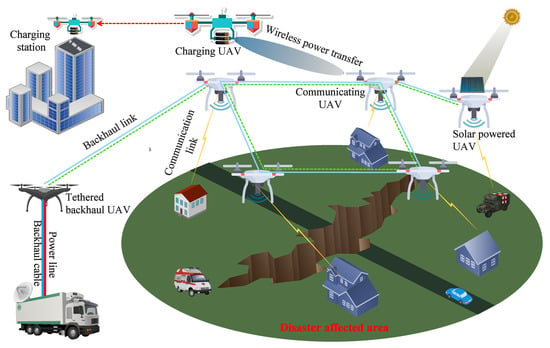
3.1. Battery Powered UAVs
The battery power supply is one of the main power supply techniques used to meet the energy requirements of UAVs. Batteries are mostly preferred in relatively smaller UAVs because classical batteries, such as lithium polymer (LiPo), can power a UAV for a maximum of 90 min [20][21]. This severely limits the commercial and industrial applications of battery-operated UAVs. Despite significant advancements in battery technology, the limitations associated with the use of batteries to power UAVs are still far from over. Since batteries are the most predominant source of energy for miniature UAVs, and the energy stored in the battery is limited and can be easily depleted during the UAV operation, to increase the flight time and operation of UAVs, batteries must be frequently charged in order to replenish the depleted energy stored in them. To address such limitations, several battery charging techniques have been developed. Hence, rin thesearchers following, we consider different battery charging mechanisms devised to recharge the UAV battery and ensure the longevity of UAV operation.3.1.1. Battery Swapping
The swapping process consists of recharging or replacing the UAV batteries and can be done conventionally or via hot swapping. In the conventional swapping method, the UAV whose battery is depleted has to leave its service location to the charging station and be replaced by an already charged UAV. The challenge with this method is that it requires several backup UAVs to be able to replace the UAVs whose batteries are depleted; as pointed out in [22], up to two standby UAVs may be needed per UAV to ensure continuous coverage for a commercial UAV that has a charging power of 180 V. However, the exact number of backup UAVs would depend on the UAV downtime, which comprises both the time taken for the UAV to fly to and from the charging station as well as that taken to recharge the battery to full capacity [19]. In the hot swapping approach, the UAVs do not have to be powered off or remain in the charging station until the battery is recharged; instead, as soon as they reach the charging station, new batteries are quickly inserted into them so that they can return to their operating station immediately. The limitation of hot swapping is that it requires human involvement to replace depleted batteries with new ones. To address this challenge, automated battery swapping mechanisms have been developed whereby a robotic actuator can be used to remove and replace UAV batteries [23]. For swapping to be implemented effectively, a battery recharging station is required to recharge or replace depleted batteries. This recharging station can be located on cellular towers, rooftops of buildings, and specialized standalone pylons. There is also the need for multiple UAVs to ensure continuous service provision. In addition, a management system must be put in place to coordinate the battery recharging and replacement cycle of the swarm of UAVs [24].3.1.2. Laser Beam Charging
Another technique for battery recharge is laser beam in-flight recharging [24]. This technique involves recharging the UAV battery during the flight, without making it land for the battery recharging or replacement, as is the case in the battery swapping technique. To recharge a UAV’s battery using the laser beam technique, an external energy source feeds the laser beam at a particular frequency and wavelength. The laser is directed towards a photo-voltaic (PV) cell on the UAV that converts the laser beam into electrical energy required to recharge the UAV’s batteries. To ensure maximum output from laser beam charging technique, a power tracking device is used to identify the maximum energy point in the laser beam. In order to maintain power transfer from the laser transmitter, the UAV must operate at low heights and occasionally in a restricted area while using the laser-beam in-flight recharging strategy [24]. Furthermore, as each UAV requires its own dedicated laser source, the number of UAVs must be reduced in order to maintain a fair operational cost [22] The laser beam is an effective method for charging UAVs, and it can be applied to both rotary-, and fixed-wing UAVs. However, the use of laser beam recharging methods restricts the operation of the UAV to a limited area in order to ensure that the recharging link is active.3.1.3. Wireless Power Transfer/Wireless Charging
Wireless power transfer (WPT) is another technique for countering and overcoming the limitations of conventional battery power supply mechanisms to UAVs. The concept of wireless charging was introduced by Nikola Tesla [25]. To perform the wireless charging of electronic devices, a transmission pad is used to charge the device using the resonant inductive coupling [25]. A typical WPT consists of two main components: namely, a transmitting device and a receiving device. A transmission device is used for the conversion of the source energy into “time-varying electromagnetic fields” which is then transmitted using a transfer media, which converts the time-varying electromagnetic arrays into electrical power that is, in turn, used to power the UAV. Currently, the WPT technique is in its early stages and there are still several issues and limitations that need to be addressed. For instance, due to the significant propagation loss of RF signals over long distances, the performance of WPT systems with a wide coverage range is essentially hampered by their low end-to-end power transmission efficiency. As a result, fixed-location energy transmitters (ETs) must be distributed in an ultra-dense way in order to provide pervasive wireless energy access for enormous low power energy receivers (ERs) deployed over a wide area. Using WPT, some UAVs can serve as recharging UAVs to ensure that batteries of other UAVs—that are serving user requests—are not depleted by flying to their respective locations to recharge their batteries while they are in operation. This will prevent service interruptions that might occur if each UAV has to fly to a charging station located at a distance from the UAV operating region to replenish its depleted battery. In such an arrangement, there is normally a transmitting UAV (tUAV) whose responsibility is to transmit RF signals to the serving UAVs (sUAVs), which have been equipped with sensors to convert the received RF signals to electrical energy needed to power the UAVs [26].3.2. Grid Powered UAVs: Tethering
Another technique for powering UAVs is called tethering, which allows the connection to be established between the UAV and power supply on the ground using a fiber optic cables [24]. Fiber optic connections allow several kilowatts of power to be transferred using high-intensity light. This technique provides more autonomy to UAVs and allows secure and quick data transfer in real time. However, the tethered UAVs (TUAV) are only allowed to hover within a certain hovering region since the tether has a maximum length and the launching point of the TUAV is typically located on a rooftop. A study in [27] investigated the best location for tethered UAVs (TUAVs) to reduce the average path-loss between the TUAV and a terrestrial receiver. They calculated the upper and lower bounds for appropriate tether length and inclination angles in order to reduce average path-loss. Aside from the maximum tether length, the heights of the buildings surrounding the TUAV rooftop determine the hovering region, which necessitates that the tether’s inclination angle does not fall below a certain minimum value to avoid tangling and to ensure safety. It is worth noting that if the tethered cable delivers constant power, the UAV flight is expected to last a few days or possibly a few months [28]. Tethered UAVs have been considered for various wireless network applications in the literature. The work in [29] presents a comparative performance analysis of untethered-UAV (U-UAV) and T-UAV-assisted cellular traffic offloading in a traffic-heavy location. They employed stochastic geometry methods to calculate joint distance distributions between users, the terrestrial BS (TBS) and UAV. A user association strategy is presented, and the relevant association areas are analytically discovered to optimize the end-to-end signal-to-noise ratio (SNR). The total coverage probability of U-UAV/T-UAV-assisted systems is then calculated for specified TBS and U-UAV/T-UAV locations. The authors in [30] introduced a novel UAV-based post-disaster communication system where U-UAVs are employed to offer cellular service in disaster-affected areas, while T-UAVs provide backhaul for the U-UAVs.3.3. Fuel Cell-Powered UAVs
Fuel cell is also used to power UAVs; the use of fuel cell is more effective and efficient as compared to the battery power UAVs, such that a fuel cell power increases the flight time of UAVs six times as compared to battery [31]. However, the fuel cells have their own limitations; for example, the fuel cells have lower energy density and require special consideration for fuel tanks [32]. Hydrogen cannot be stored at high pressure and lower temperatures. To overcome fuel cell density issues, compressed hydrogen gas, liquid hydrogen, or chemical hydrogen can be used in fuel-powered UAVs [33]. Fuel cells are much lower than lithium batteries in terms of power storage and efficiency, according to [32], fuel cells can achieve a maximum level of efficiency up to 60% compared with the lithium batteries that achieve an efficiency level of 90% in terms of power storage [19]. The limited power storage capacity in fuel cells is due to the required auxiliary subsystem needed for fuel cell stacking operations. To tackle this issue, the authors in [34] used compressed hydrogen to power the UAV, resulting in a total flight time of about 24 h. The generation of chemical hydrogen requires a specialized infrastructure and equipment, making the power supply system very complex and heavy. Moreover, the process of hydrogen extraction usually takes more time, leading to increase in response time of the UAV to load changes, which creates load balancing problems.3.4. Renewable Energy Powered UAVs
Various types of renewable energy (e.g., wind, solar, etc.) can be used to power UAVs in order to increase their travel time and power efficiency. To power UAVs with wind energy, gust soaring can be used by adjusting the trajectory of the UAVs, which enables the UAV to extract the energy from the wind by converting the potential energy of the wind into kinetic energy [35]. One of the main limitations is the dependence on the environmental condition and airflow [36]. Another prominent technique to power UAVs is to use solar PV cells that can be mounted on the wings of the UAVs in order to recharge them via the irradiation from the Sun. One of the main drawbacks of this type of power supply is that it limits the flight of UAVs in rain and during nighttime, when there is less or no irradiation from the Sun. Hence, the unavailability of the sun in the nighttime and rain entails that the UAVs needs to be powered with another form of power supply [37].3.5. Hybrid Powered UAVs
Hybrid power supply methods can be used to power UAVs, and they combine battery, fuel cells, and renewable energy sources to provide a blend of power supply [38].3.5.1. Fuel Cell-Battery
There are some limitations associated with the use of fuel cell and battery-powered UAVs. On one hand, the process of electricity generation from fuel cells takes a long time as several components such as compressors for air supply, pumps, and valves are involved, which leads to an increase in response time of the UAV to load changes. On the other hand, battery-powered UAVs have limited flight time and would require frequent recharging, which can negatively affect the effectiveness of their service. Therefore, hybridization of fuel cells and batteries can be used to minimize the delays associated with electricity generation as well as prolonging the service time and effectiveness of UAVs [39]. Hybrid power supply resources can be used interchangeably to power UAVs. For instance, battery power can be utilized by UAVs during the take-off and ascending process because batteries have more density and power storage as compared to fuel cells, and UAVs require more power when taking off and ascending to higher altitudes [40]. Then, fuel cell can be used in the flight time and descending process. Furthermore, the fuel cell can be used to charge the batteries. In [41], the authors used a technique called hardware in the loop (HIL) in the hybrid UAVs to investigate the power consumption of fuel cells and battery power sources. Several simulations were conducted to determine the level of flight endurance that can be achieved. Another study was conducted by [42], using fuel cells and battery power supply to assess the battery power contribution under different conditions and scenarios.3.5.2. Solar Cells plus Battery
Another method for extending the mission length of UAVs is the installation of PV panels to operate alongside the existing batteries. When solar irradiation is available, PV cells are often employed to power a UAV or refill its battery. The battery, in turn, is utilized for functioning at night or during hours when solar radiation is limited [43]. The use of solar power as an energy source allows small size UAVs to carry larger payloads and can increase flight periods to more than 24 h, allowing for multi-day flying [44]. The authors in [45] studied the design and validation of a solar power management system (SPMS) for their solar-cell and battery-powered experimental UAV. Their results reveal that when the angle of incidence of sunlight varies from 0 to 45 degrees, the power consumed from the solar cells fluctuates depending on the load situations and may be reduced by up to 30%. This means that changes in aircraft attitude will have a direct impact on the power generated by the solar system.4. The Role of UAV-Base Station in Wireless Communications
UAVs are employed for different operations in both military and civilian domains, including object detection, location tracking, goods delivery, disaster monitoring, information dissemination, etc. [13]. Recently, they have also found several applications in wireless communications because of their flexibility, adaptability, and easy deployment [15]. Figure 2 shows various use cases of UAV-BSs in wireless communications.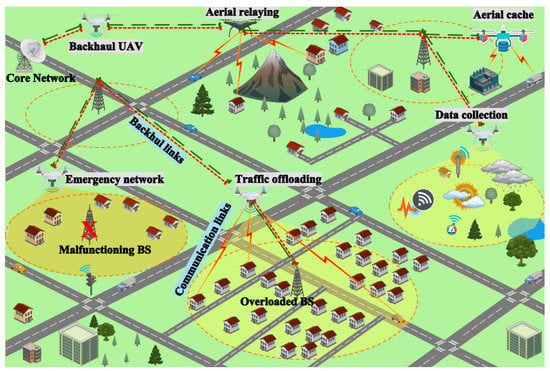
4.1. Emergency Services (Pop-Up Networks)
UAVs are becoming one of the most active areas of research and industrial development due to their promising applications in different domains. One of the application areas for UAVs is emergency response [46]. During large-scale natural disasters such as floods, earthquakes, or major fire outbreaks, hurricanes, etc., several properties and infrastructure are normally destroyed, including cellular infrastructure, thereby leading to loss of communication services in the affected area [47]. In such situations, UAVs can be deployed to such areas to replace malfunctioning or destroyed BSs and provide emergency communication services. This helps to provide coverage and improve the QoS of users in the affected area. UAV parameters such as trajectory, altitude, etc., can be optimized based on the user traffic demand and distribution to maximize their throughput and coverage. In this regard, the work in [14] considered the deployment of UAVs as emergency pop-up networks to restore communication services to users in an area where cellular network infrastructure may have been destroyed due to natural disasters. They applied RL to optimize the trajectories of the UAVs in order to maximize the coverage and throughput of ground users. In addition, UAV-BSs can serve as relays to help connect isolated groups of users that are separated from each other. This is vital in disaster situations such as earthquakes or floods where a single community can be split into isolated groups. Under this scenario, the UAV-BSs allow the mobile devices of separated community members to communicate locally with one another, even though they do not have access to the internet. Similarly, UAVs can provide backhaul services to other existing wireless networks, in essence connecting such isolated communities to the global internet. UAV-BS can also serve as a viable backhaul solution for device-to-device (D2D) communications, as shown in [48]. They can also be equipped with efficient processors to enable real-time data aggregation from different devices and information processing from remote sensors, mobile devices, and other data collection and communication technologies (e.g., IoT) within an affected area. This real-time processing of information enables faster decision making by emergency response teams and other stakeholders because the quick response time and accurate decision making are vital to executing effective rescue mission during emergencies [49].4.2. Data Harvesting from IoT Devices
Due to the promising solutions that UAVs provide in different application areas, UAVs has attracted research attention in IoT applications in order to facilitate data harvesting and relaying [50]. This is very important for cases where the IoT devices are deployed in areas where there are no wireless network facilities, such as in rural farmlands or offshore locations, to help transmit the data to the decision-making centers. In such situations, UAVs can be deployed to that location to assist in data collection [51][52]. Research works on UAV-enabled data harvesting mainly focus on UAV path planning and throughput maximization in order to ensure that the UAV collect sufficient data and returns to data center before its battery depletes [53][54][55]. Following this research direction, a deep RL framework for path planning in a multi-UAV-based data harvesting system that can adapt to dynamically changing network parameters, such as varying number of UAVs and IoT devices, different flight schedules, and amount of data to be harvested, was proposed in [54]. The path planning problem was modeled as a cooperative team of UAVs saddled with the responsibility of maximizing data collection from several IoT devices distributed in an area. Then, a multi-agent Q-learning algorithm was developed to determine the optimal trajectories that would maximize data collection from the distributed IoT devices. In [53], the authors considered the joint optimization of both the UAV trajectory and power allocation to the ground nodes in order to maximize the throughput and coverage probability in a UAV-enabled data harvesting system with distributed beamforming. Heuristic algorithms based on convex optimization and approximations were developed to find the optimal trajectory and power allocation strategy that would maximize both performance metrics.4.3. Content Caching and Computation Offloading
Content caching is an important process in modern-day wireless communication networks as users move from one location to another. It involves storing important information such as username, location, and popularly requested content at multiple BSs in order to provide seamless communication and minimize the latency involved in information retrieval and transmission to the user [56]. However, most of the caches are usually installed in a fixed location and would not be suitable for highly mobile users in vehicles and high-speed trains as the requested content would have to be stored in all BSs along the user path. In such situations, dynamic caching can be achieved by mounting the caches on UAVs, in what is known as UAV-enabled caching [57], and making the UAVs follow such highly mobile devices to provide the requested services. In this regard, the authors in [58] proposed a learning-based joint caching and trajectory optimization scheme in vehicular networks in order to enhance the throughput of the network. Mobile edge computing (MEC) was developed to assist user devices in offloading and processing computation-intensive tasks that are beyond their battery capacity [59]. However, these MEC servers are usually deployed in a fixed location within the network and may not always be accessible. To solve this problem, UAV-enabled MEC was proposed in [60] where UAVs equipped with edge servers can assist in computation offloading from ground user devices in order to minimize their energy consumption and maximize their battery lifetime as well as respond to real-time computationally intensive data processing demands. Regarding this, the authors in [61] proposed a UAV-enabled computation offloading framework based on deep RL to minimize the network latency, energy, and bandwidth cost.4.4. Load Balancing
Due to the movement of mobile users from one place to another as well as variation in user traffic demands, the traffic loads of BSs vary both temporally and spatially. This makes some BSs to be lightly loaded while others are heavily or overloaded, thereby leading to service denial or poor QoS from the overloaded BSs [62]. Although small cells help to reduce the level of traffic imbalance in cellular networks, due to the static nature of their deployment, they cannot respond to sudden changes in traffic demands that may be occasioned by large events taking place in an area for a short time or other impromptu surges in network traffic that require quick intervention to reduce the pressure on the available BSs. In such cases, UAV-BSs can be of great help because they can be quickly deployed to respond to such traffic demands and ensure that load is properly distributed among the various BS in order to avoid network congestion [63]. In this regard, the authors in [64] proposed a learning-based framework for UAV deployment to crowded regions of the network during periods of peak traffic to assist in load balancing, thereby preventing degradation in the QoS of users. In the proposed framework, both auto-regressive integrated moving average (ARIMA) and extreme gradient boosting (XGBOOST) ML algorithms were employed to forecast future high-traffic intensity regions based on historical data for proactive UAV deployment. The work in [65] considered UAV deployment for load balancing to reduce communication latency between IoT devices and macro BSs (MBSs) during periods of high traffic load on the MBS. Heuristic algorithms were developed to determine the optimal location of the UAVs, and association strategy for the IoT devices. The work in [66] considered the application of UAV-BSs for load balancing and capacity enhancement in high-traffic areas via efficient trajectory design. A deep reinforcement learning algorithm was proposed to determine the optimal trajectories of the UAVs that would efficiently balance the load among the UAV-BSs in order to achieve high spectral efficiency.4.5. Coverage Extension/Relaying
The fast growth of mobile devices, such as smartphones, tablets, and wearables, has increased the demand for high-speed wireless access. As a result, the capacity and coverage of existing wireless cellular networks have been overstretched, thereby leading to the development of new wireless technologies to address this issue [13]. Because of their vast range of use-cases, UAVs have sparked many attention [67]. The air-to-ground (AtG) dominant line-of-sight (LoS) link enhances the performance of UAV-enabled wireless communications [68], thereby resulting in reduced propagation loss and better link QoS. As a result, UAVs functioning as aerial BSs or relays are commonly employed to increase network capacity or achieve more flexible coverage [69][70][71]. The authors in [72] investigated mobile relaying in wireless powered communication networks (WPCN), where a UAV is used to aid in the transportation of information from numerous sources to a destination with severely obstructed communication channels. The sources are low-power and do not have any energy source. The UAV serves as a hybrid access point (AP) that is used both as WPT to power the user devices and as a means of information transmission and reception. In [73], the authors consider the use of UAV as a relay to serve users at the cell edge by extending coverage of an existing network using non-orthogonal multiple access (NOMA) technology, thereby enhancing their QoS.4.6. Capacity/Throughput Enhancement
The exponential growth in the telecommunication and information technology landscape over the last decade has involved a tremendous increase in the amount of user demands and requests for more resources in terms of data traffic. To cope with the situation, macro BSs and small BSs are used to provide coverage to users. However, due to the continuous increase and fluctuation in data traffic at various locations in the network, the dense deployment of only terrestrial small BS networks is no longer sufficient to address this capacity demands. As a result, UAVs have been identified as a potential solution to provide more reliable and effective coverage to users due to their flexibility, adaptability, and quick configuration [74][75]. The authors in [76] considered the optimal deployment of UAVs in heterogeneous networks in order to enhance the capacity of the network. To determine the optimal geographic location to deploy the UAVs, a utility function was developed to model the traffic intensity in various parts of the network, after which a heuristic algorithm was proposed to assign the UAVs to their optimal positions. Compared with existing ground-based wireless networks, the suggested model was proven to offer superior capacity, consistency, and extended connectivity. The work in [77] considered the deployment of multiple-UAVs to offload traffic from a single terrestrial BS that is heavily loaded in order to maximize the throughput of ground users at the cell edge.4.7. Backhauling
In cellular networks, the backhaul serves as a connection between the BSs and the core network and this connection is usually established using fibre cable, microwave links, etc. However, in emergency scenarios, where existing backhaul infrastructures have been damaged, or when there is a need to enhance the capacity of existing backhaul links, ad-hoc backhaul connections can be established using UAVs [78][79]. With respect to UAV-enabled backhaul connections, the authors of [78] proposed a UAV-enabled wireless backhaul mechanism for ultra-dense networks. Game theory was employed to model the formation of the multi-hop backhaul network comprising multiple UAVs. Then, a heuristic algorithm was proposed to determine the optimal network formation strategy that maximizes data rate and minimizes network delays. UAVs can also be used for backhauling in high mobility network scenarios such as in high-speed trains where, due to the very high speed of the train, the channel condition is subject to continuous turbulence and instability. In this regard, a backhauling mechanism using the combination of UAVs and free-space optical (FSO) communications was developed in [80] to enhance the coverage probability of the high-speed train network.4.8. Energy Efficiency
The UAVs can also help enhance the EE of existing cellular networks. This can be achieved by deploying UAVs to assist heterogeneous networks to enhance their capacity faster than their power consumption, which in turn helps to improve their EE. The authors in [81] demonstrated this by deploying millimeter wave UAVs alongside macro and small BSs in a three-tier heterogeneous network to enhance cell edge users throughput, which also led to the overall improvement in the EE of the network. UAVs can also be deployed in existing terrestrial cellular networks to serve delay and rate sensitive users while offloading the traffic of lightly loaded small BSs in order to put them into sleep mode. This approach is known as UAV-assisted BS sleeping strategy and it results in a significant reduction in the energy consumption of the network as was introduced in [82].5. Types of Energy Optimization in UAV-Based Cellular Networks
The energy consumption of UAVs is one of the major challenges that limit their applications in many areas including in wireless communications networks [83][84]. As 5G and beyond networks target drastic improvement in network EE, the use of UAV-BSs, though very promising, could be a hindrance to the actualization of this objective if the issue of increased energy consumption is not carefully considered [15]. Since UAVs are designed to fly from one location to another, their application in cellular networks brings a lot of flexibility and adaptability to the network as they can be deployed on demand to various parts of the network to handle different challenges ranging from network restoration, coverage and capacity enhancement, traffic offloading, load balancing, backhauling, etc. There are four major aspects of energy optimization in UAV-based cellular networks:5.1. Optimization of the Propulsion Energy
The propulsion energy is the energy consumption associated with flying or hovering the UAV-BSs over the service area. This is the most significant energy consumption of the UAV-BS [15]. Hence, energy optimization strategies proposed in this direction aim at reducing the energy consumption due to the movement of the UAV-BS. In this regard, a few models to quantify the energy consumption of the UAV due to propulsion were developed in [85][86][87]. In addition, various approaches to minimize the propulsion energy consumption have been introduced, including regulating UAV altitude and planning the trajectory, etc. [46][86][88].5.2. Optimization of the Communication Energy
Communication energy is the energy consumption associated with signal processing and data transmission during the UAV operation in wireless communication networks. This is usually less significant compared with the energy consumption due to propulsion [15], therefore, energy optimization approaches proposed in this area are targeted at reducing the energy consumed while processing and transmitting user information. The techniques proposed in this area include transmission power allocation and control, scheduling the transmission of UAV-BSs—particularly for the cases where they need to fly over a predefined trajectory, and optimally positioning UAVs in a service area [89][90][91][92].5.3. Joint Optimization of the Communication and Propulsion Energy
Unlike the first and second cases that consider optimizing either the communication or propulsion energy consumption, the works conducted in this direction consider the simultaneous optimization of both the communication and propulsion energy consumption of UAV-BSs. These approaches result in the most energy conservation as both components of the UAV-BS energy consumption are considered together. The strategies considered in this area involve a combination of the approaches proposed in propulsion energy optimization as well as that of communication energy optimization [85][93].5.4. Optimization of the Energy Consumption in UAV-Assisted Cellular Networks
The previous cases (i.e., propulsion and communication energy) considered mainly deal with the energy consumption of only the UAV-BSs when they are deployed alone or as a swarm network comprising multiple UAV-BSs. The UAV-assisted cellular network is the case where a single/multiple UAV-BSs is/are deployed in existing terrestrial BSs in order to enhance certain network performance indicators such as throughput, coverage, etc. [94][95]. However, their deployment could result in an increase in the overall energy consumption of the network if not properly managed. Hence, the strategies developed in this direction are meant to reduce the energy consumption of both the UAV-BSs and the fixed BSs, or a scenario where the UAV-BSs can help in reducing the energy consumption in fixed BSs through a UAV-assisted BS sleeping strategy [81][82][96].References
- Ali, R.; Zikria, Y.B.; Bashir, A.K.; Garg, S.; Kim, H.S. URLLC for 5G and Beyond: Requirements, Enabling Incumbent Technologies and Network Intelligence. IEEE Access 2021, 9, 67064–67095.
- Chettri, L.; Bera, R. A Comprehensive Survey on Internet of Things (IoT) Toward 5G Wireless Systems. IEEE Internet Things J. 2020, 7, 16–32.
- Ericsson. Ericsson Mobility Report; Technical report; Ericsson: Stockholm, Sweden, 2021.
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The Road Towards 6G: A Comprehensive Survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366.
- Alwis, C.D.; Kalla, A.; Pham, Q.V.; Kumar, P.; Dev, K.; Hwang, W.J.; Liyanage, M. Survey on 6G Frontiers: Trends, Applications, Requirements, Technologies and Future Research. IEEE Open J. Commun. Soc. 2021, 2, 836–886.
- Sun, Y.; Liu, J.; Wang, J.; Cao, Y.; Kato, N. When Machine Learning Meets Privacy in 6G: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2694–2724.
- Mao, B.; Tang, F.; Kawamoto, Y.; Kato, N. AI Models for Green Communications Towards 6G. IEEE Commun. Surv. Tutor. 2021.
- Saadi, M. 6G: The Network of Technology Convergence; Technical report; ABI Research: Oyster Bay, NY, USA, 2022.
- Wang, X.; Zhou, Z.; Yang, Z.; Liu, Y.; Peng, C. Spatio-temporal analysis and prediction of cellular traffic in metropolis. In Proceedings of the 2017 IEEE 25th International Conference on Network Protocols (ICNP), Toronto, ON, Canada, 10–13 October 2017; pp. 1–10.
- Ozturk, M.; Abubakar, A.I.; Nadas, J.P.B.; Rais, R.N.B.; Hussain, S.; Imran, M.A. Energy Optimization in Ultra-Dense Radio Access Networks via Traffic-Aware Cell Switching. IEEE Trans. Green Commun. Netw. 2021, 5, 832–845.
- Barlacchi, G.; De Nadai, M.; Larcher, R.; Casella, A.; Chitic, C.; Torrisi, G.; Antonelli, F.; Vespignani, A.; Pentland, A.; Lepri, B. A multi-source dataset of urban life in the city of Milan and the Province of Trentino. Sci. Data 2015, 2, 150055.
- Abubakar, A.I.; Mollel, M.S.; Ozturk, M.; Hussain, S.; Imran, M.A. A lightweight cell switching and traffic offloading scheme for energy optimization in ultra-dense heterogeneous networks. Phys. Commun. 2022, 52, 101643.
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360.
- Klaine, P.V.; Nadas, J.P.B.; Souza, R.D.; Imran, M.A. Distributed Drone Base Station Positioning for Emergency Cellular Networks Using Reinforcement Learning. Cogn. Comput. 2018, 10, 790–804.
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442.
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2010.
- Saeed, A.S.; Younes, A.B.; Islam, S.; Dias, J.; Seneviratne, L.; Cai, G. A review on the platform design, dynamic modeling and control of hybrid UAVs. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Colorado, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 806–815.
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035.
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823.
- Khofiyah, N.A.; Maret, S.; Sutopo, W.; Nugroho, B.D.A. Goldsmith’s Commercialization Model for Feasibility Study of Technology Lithium Battery Pack Drone. In Proceedings of the 2018 5th International Conference on Electric Vehicular Technology (ICEVT), Surakarta, Indonesia, 30–31 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 147–151.
- Verstraete, D.; Lehmkuehler, K.; Wong, K. Design of a fuel cell powered blended wing body UAV. In ASME International Mechanical Engineering Congress and Exposition; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 45172, pp. 621–629.
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as mobile infrastructure: Addressing battery lifetime. IEEE Commun. Mag. 2019, 57, 132–137.
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124.
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power supply architectures for drones-a review. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 5826–5831.
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855.
- Hassan, J.; Bokani, A.; Kanhere, S.S. Recharging of Flying Base Stations using Airborne RF Energy Sources. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference Workshop (WCNCW), Marrakech, Morocco, 15–18 April 2019; pp. 1–6.
- Kishk, M.A.; Bader, A.; Alouini, M.S. On the 3-D placement of airborne base stations using tethered UAVs. IEEE Trans. Commun. 2020, 68, 5202–5215.
- Gu, B.W.; Choi, S.Y.; Choi, Y.S.; Cai, G.; Seneviratne, L.; Rim, C.T. Novel roaming and stationary tethered aerial robots for continuous mobile missions in nuclear power plants. Nucl. Eng. Technol. 2016, 48, 982–996.
- Bushnaq, O.M.; Kishk, M.A.; Celik, A.; Alouini, M.S.; Al-Naffouri, T.Y. Optimal deployment of tethered drones for maximum cellular coverage in user clusters. IEEE Trans. Wirel. Commun. 2020, 20, 2092–2108.
- Matracia, M.; Kishk, M.A.; Alouini, M.S. On the Topological Aspects of UAV-Assisted Post-Disaster Wireless Communication Networks. arXiv 2021, arXiv:2109.13671.
- Hwang, J.J.; Kuo, J.K.; Wu, W.; Chang, W.R.; Lin, C.H.; Wang, S.E. Lifecycle performance assessment of fuel cell/battery electric vehicles. Int. J. Hydrogen Energy 2013, 38, 3433–3446.
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485.
- Kendall, K.; Pollet, B. 4.12-Hydrogen and Fuel Cells in Transport. Compr. Renew. Energy 2012, 4, 301.
- Rhoads, G.; Bradley, T.; Wagner, N.; Taylor, B.; Keen, D. Design and flight test results for a 24 h fuel cell unmanned aerial vehicle. In Proceedings of the 8th Annual International Energy Conversion Engineering Conference, Nashville, TN, USA, 25–28 July 2010; p. 6690.
- Richardson, P.L. Upwind dynamic soaring of albatrosses and UAVs. Prog. Oceanogr. 2015, 130, 146–156.
- Bonnin, V.; Bénard, E.; Moschetta, J.M.; Toomer, C. Energy-harvesting mechanisms for UAV flight by dynamic soaring. Int. J. Micro Air Veh. 2015, 7, 213–229.
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Lotz, R.; Siebenmann, D.; Leutenegger, S.; Alexis, K.; Siegwart, R. A solar-powered hand-launchable UAV for low-altitude multi-day continuous flight. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 3986–3993.
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819.
- Belmonte, N.; Staulo, S.; Fiorot, S.; Luetto, C.; Rizzi, P.; Baricco, M. Fuel cell powered octocopter for inspection of mobile cranes: Design, cost analysis and environmental impacts. Appl. Energy 2018, 215, 556–565.
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298.
- Verstraete, D.; Harvey, J.R.; Palmer, J.L. Hardware-in-the-loop simulation of fuel-cell-based hybrid-electrical UAV propulsion. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; Volume 4, pp. 2662–2674.
- Gong, A.; Verstraete, D. Role of battery in a hybrid electrical fuel cell UAV propulsion system. In Proceedings of the 52nd AIAA Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014.
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless charging techniques for UAVs: A review, reconceptualization, and extension. IEEE Access 2018, 6, 29865–29884.
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2460–2466.
- Shiau, J.K.; Ma, D.M.; Yang, P.Y.; Wang, G.F.; Gong, J.H. Design of a solar power management system for an experimental UAV. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1350–1360.
- Sambo, Y.A.; Klaine, P.V.; Nadas, J.P.B.; Imran, M.A. Energy Minimization UAV Trajectory Design for Delay-Tolerant Emergency Communication. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6.
- Jin, W.; Yang, J.; Fang, Y.; Feng, W. Research on Application and Deployment of UAV in Emergency Response. In Proceedings of the 2020 IEEE 10th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 17–19 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 277–280.
- Deepak, G.C.; Ladas, A.; Sambo, Y.A.; Pervaiz, H.; Politis, C.; Imran, M.A. An Overview of Post-Disaster Emergency Communication Systems in the Future Networks. IEEE Wirel. Commun. 2019, 26, 132–139.
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091.
- Singh, S.; Malik, A.; Kumar, R.; Singh, P.K. A proficient data gathering technique for unmanned aerial vehicle-enabled heterogeneous wireless sensor networks. Int. J. Commun. Syst. 2021, 34, e4956.
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349.
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619.
- Feng, T.; Xie, L.; Yao, J.; Xu, J. UAV-Enabled Data Collection for Wireless Sensor Networks with Distributed Beamforming. IEEE Trans. Wirel. Commun. 2021.
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. UAV Path Planning for Wireless Data Harvesting: A Deep Reinforcement Learning Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Virtual, 7–11 December 2020; pp. 1–6.
- Liu, Y.; Dai, H.N.; Wang, H.; Imran, M.; Wang, X.; Shoaib, M. UAV-enabled data acquisition scheme with directional wireless energy transfer for Internet of Things. Comput. Commun. 2020, 155, 184–196.
- Liu, D.; Chen, B.; Yang, C.; Molisch, A.F. Caching at the wireless edge: Design aspects, challenges, and future directions. IEEE Commun. Mag. 2016, 54, 22–28.
- Dai, H.; Zhang, L.; Bian, H.; Wang, B. UAV relaying assisted transmission optimization with caching in vehicular networks. Phys. Commun. 2020, 43, 101214.
- Wu, H.; Lyu, F.; Zhou, C.; Chen, J.; Wang, L.; Shen, X. Optimal UAV Caching and Trajectory in Aerial-Assisted Vehicular Networks: A Learning-Based Approach. IEEE J. Sel. Areas Commun. 2020, 38, 2783–2797.
- Mach, P.; Becvar, Z. Mobile Edge Computing: A Survey on Architecture and Computation Offloading. IEEE Commun. Surv. Tutor. 2017, 19, 1628–1656.
- Cui, Y.; Zheng, J.; Wang, X.; Diao, X.; Cai, Y.; Liu, S. UAV-enabled MEC system: Locations and coverage optimization. In Proceedings of the IET 8th International Conference on Wireless, Mobile Multimedia Networks, Beijing, China, 12–15 October 2019; pp. 12–18.
- Wang, H.; Ke, H.; Sun, W. Unmanned-Aerial-Vehicle-Assisted Computation Offloading for Mobile Edge Computing Based on Deep Reinforcement Learning. IEEE Access 2020, 8, 180784–180798.
- Sanike, A.; Subramanyam, A.; Reddy, S.S.S.; RaghuRam, G. Load balancing technique to handle the congestion in the communication networks. In Proceedings of the 2015 Conference on Power, Control, Communication and Computational Technologies for Sustainable Growth (PCCCTSG), Kurnool, India, 11–12 December 2015; pp. 289–293.
- Bor-Yaliniz, I.; Yanikomeroglu, H. The New Frontier in RAN Heterogeneity: Multi-Tier Drone-Cells. IEEE Commun. Mag. 2016, 54, 48–55.
- Hu, J.; Zhang, H.; Liu, Y.; Li, X.; Ji, H. An Intelligent UAV Deployment Scheme for Load Balance in Small Cell Networks Using Machine Learning. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6.
- Fan, Q.; Ansari, N. Towards Traffic Load Balancing in Drone-Assisted Communications for IoT. IEEE Internet Things J. 2019, 6, 3633–3640.
- Saxena, V.; Jaldén, J.; Klessig, H. Optimal UAV Base Station Trajectories Using Flow-Level Models for Reinforcement Learning. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 1101–1112.
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661.
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Sydney, Australia, 8–12 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2898–2904.
- Jaziri, A.; Nasri, R.; Chahed, T. Congestion mitigation in 5G networks using drone relays. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 233–238.
- Zhan, P.; Yu, K.; Swindlehurst, A.L. Wireless relay communications with unmanned aerial vehicles: Performance and optimization. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2068–2085.
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for mobile relaying systems. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6.
- Li, Y.; Yang, D.; Xu, Y.; Xiao, L.; Chen, H. Throughput maximization for UAV-enabled relaying in wireless powered communication networks. Sensors 2019, 19, 2989.
- Zaidi, S.K.; Hasan, S.F.; Gui, X.; Siddique, N.; Ahmad, S. Exploiting UAV as NOMA based Relay for Coverage Extension. In Proceedings of the 2019 2nd International Conference on Computer Applications Information Security (ICCAIS), Riyadh, Saudi Arabia, 1–3 May 2019; pp. 1–5.
- You, X.; Wang, C.X.; Huang, J.; Gao, X.; Zhang, Z.; Wang, M.; Huang, Y.; Zhang, C.; Jiang, Y.; Wang, J.; et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts. Sci. China Inf. Sci. 2021, 64, 1–74.
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142.
- Sharma, V.; Bennis, M.; Kumar, R. UAV-assisted heterogeneous networks for capacity enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210.
- Song, Q.; Zheng, F.C.; Jin, S. Multiple UAVs Enabled Data Offloading for Cellular Hotspots. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6.
- Challita, U.; Saad, W. Network Formation in the Sky: Unmanned Aerial Vehicles for Multi-Hop Wireless Backhauling. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6.
- Gapeyenko, M.; Petrov, V.; Moltchanov, D.; Andreev, S.; Himayat, N.; Koucheryavy, Y. Flexible and Reliable UAV-Assisted Backhaul Operation in 5G mmWave Cellular Networks. IEEE J. Sel. Areas Commun. 2018, 36, 2486–2496.
- Khallaf, H.S.; Uysal, M. Comprehensive study on UAV-based FSO links for high-speed train backhauling. Appl. Opt. 2021, 60, 8239–8247.
- Alsharoa, A.; Ghazzai, H.; Kadri, A.; Kamal, A.E. Energy management in cellular hetnets assisted by solar powered drone small cells. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6.
- Chang, W.; Meng, Z.T.; Liu, K.C.; Wang, L.C. Energy-Efficient Sleep Strategy for the UBS-Assisted Small-Cell Network. IEEE Trans. Veh. Technol. 2021, 70, 5178–5183.
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021.
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42.
- Zeng, Y.; Xu, J.; Zhang, R. Energy Minimization for Wireless Communication With Rotary-Wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345.
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication With Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760.
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394.
- Wu, Y.; Yang, W.; Guan, X.; Wu, Q. Energy-Efficient Trajectory Design for UAV-Enabled Communication Under Malicious Jamming. IEEE Wirel. Commun. Lett. 2021, 10, 206–210.
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437.
- Wang, L.; Hu, B.; Chen, S.; Cui, J. UAV-enabled reliable mobile relaying based on downlink NOMA. IEEE Access 2020, 8, 25237–25248.
- You, J.; Jung, S.; Seo, J.; Kang, J. Energy-Efficient 3-D Placement of an Unmanned Aerial Vehicle Base Station With Antenna Tilting. IEEE Commun. Lett. 2020, 24, 1323–1327.
- Plachy, J.; Becvar, Z. Energy Efficient Positioning of Flying Base Stations via Coulomb’s law. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6.
- Faqir, O.J.; Kerrigan, E.C.; Gündüz, D. Joint optimization of transmission and propulsion in aerial communication networks. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 3955–3960.
- Li, T.; Sheng, M.; Lyu, R.; Liu, J.; Li, J. UAV assisted heterogeneous wireless networks: Potentials and challenges. ZTE Commun. 2018, 16.
- Shehzad, M.K.; Akhtar, M.W.; Hassan, S.A. Performance of mmWave UAV-Assisted 5G Hybrid Heterogeneous Networks. Auton. Airborne Wirel. Netw. 2021, 97–118.
- Chakareski, J.; Naqvi, S.; Mastronarde, N.; Xu, J.; Afghah, F.; Razi, A. An Energy Efficient Framework for UAV-Assisted Millimeter Wave 5G Heterogeneous Cellular Networks. IEEE Trans. Green Commun. Netw. 2019, 3, 37–44.