Wireless communication networks have been witnessing unprecedented demand due to the increasing number of connected devices and emerging bandwidth-hungry applications. Although there are many competent technologies for capacity enhancement purposes, such as millimeter wave communications and network densification, there is still room and need for further capacity enhancement in wireless communication networks, especially for the cases of unusual people gatherings, such as sport competitions, musical concerts, etc. Unmanned aerial vehicles (UAVs) have been identified as one of the promising options to enhance capacity due to their easy implementation, pop-up fashion operation, and cost-effective nature. The main idea is to deploy base stations on UAVs and operate them as flying base stations, thereby bringing additional capacity where it is needed. However, UAVs mostly have limited energy storage, hence, their energy consumption must be optimized to increase flight time. In this article we investigate different types of UAVs, power sources and charging mechanisms of UAVs, applications of UAVs in wireless communications and the broad categories of UAV energy optimization techniques.
- wireless communications
- cellular networks
- energy optimization
- UAVs
1. Introduction
2. Types of UAVs
UAVs, also known as drones, are of two main categories: fixed-wing and rotary-wing. However, with the advancement in UAV technology and the wide range of applications of UAVs, rotary-, and fixed-wing UAVs can be combined to form a hybrid design [15][19]. Rotary-wing UAVs are designed to perform vertical take-offs and landings. One of the main design features of rotary-wing UAVs is that they can hover on a fixed and specified location, making them perfect candidates to perform tasks such as continuous cellular coverage and sensing [15][19]. However, rotary-wing UAVs consume more energy since they operate at a low altitude with little mobility, and their constant flight against gravity results in greater power consumption [15][19]. Fixed-wing UAVs are another type of UAV that can glide through the air and operate at higher altitudes, making them more energy efficient and capable of carrying heavier payloads. Moreover, fixed-wing UAVs, such as tiny planes, have heavier weights, faster speeds, and must move forward to stay airborne [13]. However, fixed-wing UAVs require a runway for landing and take-off and are more expensive than rotary-wing UAVs [16][40]. The limitations of both rotary-, and fixed-wing UAVs led to the emergence of a new type of UAV in terms of shape and aerodynamics, called hybrid UAVs [17][41]. The fundamental design strategy behind the hybrid ones is to combine the design features of both rotary-, and fixed-wing UAVs. Hybrid UAVs employ different features of both rotary and fixed-wings for various maneuvers and flights dynamics. These UAVs can perform vertical takeoff and landing (VTOL) in copter mode and shift to high-speed forward flight in aeroplane mode [18][42]. For example, a parrot swing UAV [15][19], which is an improved version of the traditional four-arm quadcopter (a rotary-wing UAV), has been equipped with some fixed-wing UAV features. As such, it can take off vertically quickly, hover, and fly horizontally at supersonic speed.3. UAV Power Supply and Charging Mechanisms
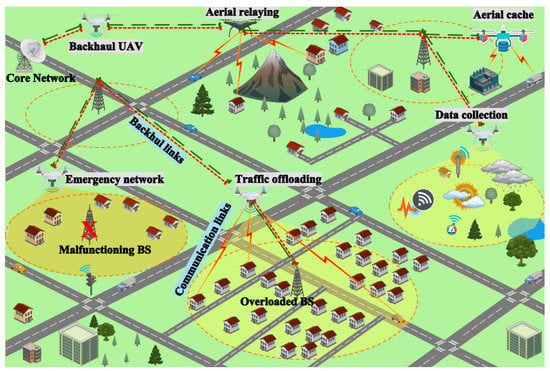
In recent years, there has been an increase in the application of UAVs in both commercial and military domains, due to their easy adaptability, the flexibility of deployment, and cost-effectiveness [13]. However, to fully exploit the capabilities of UAVs in different application domains, there is a need to consider the challenges and limitations of UAVs. One of the most important limitations in UAVs is power and energy consumption [15][19]. Commercial UAVs are usually powered with rechargeable batteries for operations, while large UAVs, such as military UAVs, use non-renewable resources, such as fuel and gas, to provide more energy to the UAV for longer flight time. In recent years, new and alternative methods for UAV power supply, including solar energy, wireless charging, laser beam charging systems, etc., have been developed and tested [19][43]. The different methods of power supply and charging mechanisms for UAVs while Figure 1 illustrates various UAV power supply and charging mechanisms.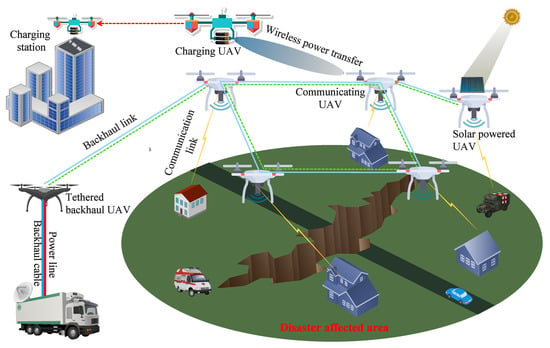
3.1. Battery Powered UAVs
The battery power supply is one of the main power supply techniques used to meet the energy requirements of UAVs. Batteries are mostly preferred in relatively smaller UAVs because classical batteries, such as lithium polymer (LiPo), can power a UAV for a maximum of 90 min [20][21][44,45]. This severely limits the commercial and industrial applications of battery-operated UAVs. Despite significant advancements in battery technology, the limitations associated with the use of batteries to power UAVs are still far from over. Since batteries are the most predominant source of energy for miniature UAVs, and the energy stored in the battery is limited and can be easily depleted during the UAV operation, to increase the flight time and operation of UAVs, batteries must be frequently charged in order to replenish the depleted energy stored in them. To address such limitations, several battery charging techniques have been developed. Hence, rin thesearchers following, we consider different battery charging mechanisms devised to recharge the UAV battery and ensure the longevity of UAV operation.3.1.1. Battery Swapping
The swapping process consists of recharging or replacing the UAV batteries and can be done conventionally or via hot swapping. In the conventional swapping method, the UAV whose battery is depleted has to leave its service location to the charging station and be replaced by an already charged UAV. The challenge with this method is that it requires several backup UAVs to be able to replace the UAVs whose batteries are depleted; as pointed out in [22][46], up to two standby UAVs may be needed per UAV to ensure continuous coverage for a commercial UAV that has a charging power of 180 V. However, the exact number of backup UAVs would depend on the UAV downtime, which comprises both the time taken for the UAV to fly to and from the charging station as well as that taken to recharge the battery to full capacity [19][43]. In the hot swapping approach, the UAVs do not have to be powered off or remain in the charging station until the battery is recharged; instead, as soon as they reach the charging station, new batteries are quickly inserted into them so that they can return to their operating station immediately. The limitation of hot swapping is that it requires human involvement to replace depleted batteries with new ones. To address this challenge, automated battery swapping mechanisms have been developed whereby a robotic actuator can be used to remove and replace UAV batteries [23][47]. For swapping to be implemented effectively, a battery recharging station is required to recharge or replace depleted batteries. This recharging station can be located on cellular towers, rooftops of buildings, and specialized standalone pylons. There is also the need for multiple UAVs to ensure continuous service provision. In addition, a management system must be put in place to coordinate the battery recharging and replacement cycle of the swarm of UAVs [24][48].3.1.2. Laser Beam Charging
Another technique for battery recharge is laser beam in-flight recharging [24][48]. This technique involves recharging the UAV battery during the flight, without making it land for the battery recharging or replacement, as is the case in the battery swapping technique. To recharge a UAV’s battery using the laser beam technique, an external energy source feeds the laser beam at a particular frequency and wavelength. The laser is directed towards a photo-voltaic (PV) cell on the UAV that converts the laser beam into electrical energy required to recharge the UAV’s batteries. To ensure maximum output from laser beam charging technique, a power tracking device is used to identify the maximum energy point in the laser beam. In order to maintain power transfer from the laser transmitter, the UAV must operate at low heights and occasionally in a restricted area while using the laser-beam in-flight recharging strategy [24][48]. Furthermore, as each UAV requires its own dedicated laser source, the number of UAVs must be reduced in order to maintain a fair operational cost [22][46] The laser beam is an effective method for charging UAVs, and it can be applied to both rotary-, and fixed-wing UAVs. However, the use of laser beam recharging methods restricts the operation of the UAV to a limited area in order to ensure that the recharging link is active.3.1.3. Wireless Power Transfer/Wireless Charging
Wireless power transfer (WPT) is another technique for countering and overcoming the limitations of conventional battery power supply mechanisms to UAVs. The concept of wireless charging was introduced by Nikola Tesla [25][49]. To perform the wireless charging of electronic devices, a transmission pad is used to charge the device using the resonant inductive coupling [25][49]. A typical WPT consists of two main components: namely, a transmitting device and a receiving device. A transmission device is used for the conversion of the source energy into “time-varying electromagnetic fields” which is then transmitted using a transfer media, which converts the time-varying electromagnetic arrays into electrical power that is, in turn, used to power the UAV. Currently, the WPT technique is in its early stages and there are still several issues and limitations that need to be addressed. For instance, due to the significant propagation loss of RF signals over long distances, the performance of WPT systems with a wide coverage range is essentially hampered by their low end-to-end power transmission efficiency. As a result, fixed-location energy transmitters (ETs) must be distributed in an ultra-dense way in order to provide pervasive wireless energy access for enormous low power energy receivers (ERs) deployed over a wide area. Using WPT, some UAVs can serve as recharging UAVs to ensure that batteries of other UAVs—that are serving user requests—are not depleted by flying to their respective locations to recharge their batteries while they are in operation. This will prevent service interruptions that might occur if each UAV has to fly to a charging station located at a distance from the UAV operating region to replenish its depleted battery. In such an arrangement, there is normally a transmitting UAV (tUAV) whose responsibility is to transmit RF signals to the serving UAVs (sUAVs), which have been equipped with sensors to convert the received RF signals to electrical energy needed to power the UAVs [26][50].3.2. Grid Powered UAVs: Tethering
Another technique for powering UAVs is called tethering, which allows the connection to be established between the UAV and power supply on the ground using a fiber optic cables [24][48]. Fiber optic connections allow several kilowatts of power to be transferred using high-intensity light. This technique provides more autonomy to UAVs and allows secure and quick data transfer in real time. However, the tethered UAVs (TUAV) are only allowed to hover within a certain hovering region since the tether has a maximum length and the launching point of the TUAV is typically located on a rooftop. A study in [27][51] investigated the best location for tethered UAVs (TUAVs) to reduce the average path-loss between the TUAV and a terrestrial receiver. They calculated the upper and lower bounds for appropriate tether length and inclination angles in order to reduce average path-loss. Aside from the maximum tether length, the heights of the buildings surrounding the TUAV rooftop determine the hovering region, which necessitates that the tether’s inclination angle does not fall below a certain minimum value to avoid tangling and to ensure safety. It is worth noting that if the tethered cable delivers constant power, the UAV flight is expected to last a few days or possibly a few months [28][52]. Tethered UAVs have been considered for various wireless network applications in the literature. The work in [29][53] presents a comparative performance analysis of untethered-UAV (U-UAV) and T-UAV-assisted cellular traffic offloading in a traffic-heavy location. They employed stochastic geometry methods to calculate joint distance distributions between users, the terrestrial BS (TBS) and UAV. A user association strategy is presented, and the relevant association areas are analytically discovered to optimize the end-to-end signal-to-noise ratio (SNR). The total coverage probability of U-UAV/T-UAV-assisted systems is then calculated for specified TBS and U-UAV/T-UAV locations. The authors in [30][54] introduced a novel UAV-based post-disaster communication system where U-UAVs are employed to offer cellular service in disaster-affected areas, while T-UAVs provide backhaul for the U-UAVs.3.3. Fuel Cell-Powered UAVs
Fuel cell is also used to power UAVs; the use of fuel cell is more effective and efficient as compared to the battery power UAVs, such that a fuel cell power increases the flight time of UAVs six times as compared to battery [31][55]. However, the fuel cells have their own limitations; for example, the fuel cells have lower energy density and require special consideration for fuel tanks [32][56]. Hydrogen cannot be stored at high pressure and lower temperatures. To overcome fuel cell density issues, compressed hydrogen gas, liquid hydrogen, or chemical hydrogen can be used in fuel-powered UAVs [33][57]. Fuel cells are much lower than lithium batteries in terms of power storage and efficiency, according to [32][56], fuel cells can achieve a maximum level of efficiency up to 60% compared with the lithium batteries that achieve an efficiency level of 90% in terms of power storage [19][43]. The limited power storage capacity in fuel cells is due to the required auxiliary subsystem needed for fuel cell stacking operations. To tackle this issue, the authors in [34][58] used compressed hydrogen to power the UAV, resulting in a total flight time of about 24 h. The generation of chemical hydrogen requires a specialized infrastructure and equipment, making the power supply system very complex and heavy. Moreover, the process of hydrogen extraction usually takes more time, leading to increase in response time of the UAV to load changes, which creates load balancing problems.3.4. Renewable Energy Powered UAVs
Various types of renewable energy (e.g., wind, solar, etc.) can be used to power UAVs in order to increase their travel time and power efficiency. To power UAVs with wind energy, gust soaring can be used by adjusting the trajectory of the UAVs, which enables the UAV to extract the energy from the wind by converting the potential energy of the wind into kinetic energy [35][59]. One of the main limitations is the dependence on the environmental condition and airflow [36][60]. Another prominent technique to power UAVs is to use solar PV cells that can be mounted on the wings of the UAVs in order to recharge them via the irradiation from the Sun. One of the main drawbacks of this type of power supply is that it limits the flight of UAVs in rain and during nighttime, when there is less or no irradiation from the Sun. Hence, the unavailability of the sun in the nighttime and rain entails that the UAVs needs to be powered with another form of power supply [37][61].3.5. Hybrid Powered UAVs
Hybrid power supply methods can be used to power UAVs, and they combine battery, fuel cells, and renewable energy sources to provide a blend of power supply [38][62].3.5.1. Fuel Cell-Battery
There are some limitations associated with the use of fuel cell and battery-powered UAVs. On one hand, the process of electricity generation from fuel cells takes a long time as several components such as compressors for air supply, pumps, and valves are involved, which leads to an increase in response time of the UAV to load changes. On the other hand, battery-powered UAVs have limited flight time and would require frequent recharging, which can negatively affect the effectiveness of their service. Therefore, hybridization of fuel cells and batteries can be used to minimize the delays associated with electricity generation as well as prolonging the service time and effectiveness of UAVs [39][63]. Hybrid power supply resources can be used interchangeably to power UAVs. For instance, battery power can be utilized by UAVs during the take-off and ascending process because batteries have more density and power storage as compared to fuel cells, and UAVs require more power when taking off and ascending to higher altitudes [40][64]. Then, fuel cell can be used in the flight time and descending process. Furthermore, the fuel cell can be used to charge the batteries. In [41][65], the authors used a technique called hardware in the loop (HIL) in the hybrid UAVs to investigate the power consumption of fuel cells and battery power sources. Several simulations were conducted to determine the level of flight endurance that can be achieved. Another study was conducted by [42][66], using fuel cells and battery power supply to assess the battery power contribution under different conditions and scenarios.3.5.2. Solar Cells plus Battery
Another method for extending the mission length of UAVs is the installation of PV panels to operate alongside the existing batteries. When solar irradiation is available, PV cells are often employed to power a UAV or refill its battery. The battery, in turn, is utilized for functioning at night or during hours when solar radiation is limited [43][67]. The use of solar power as an energy source allows small size UAVs to carry larger payloads and can increase flight periods to more than 24 h, allowing for multi-day flying [44][68]. The authors in [45][69] studied the design and validation of a solar power management system (SPMS) for their solar-cell and battery-powered experimental UAV. Their results reveal that when the angle of incidence of sunlight varies from 0 to 45 degrees, the power consumed from the solar cells fluctuates depending on the load situations and may be reduced by up to 30%. This means that changes in aircraft attitude will have a direct impact on the power generated by the solar system.4. The Role of UAV-Base Station in Wireless Communications
UAVs are employed for different operations in both military and civilian domains, including object detection, location tracking, goods delivery, disaster monitoring, information dissemination, etc. [13]. Recently, they have also found several applications in wireless communications because of their flexibility, adaptability, and easy deployment [15][19]. Figure 2 shows various use cases of UAV-BSs in wireless communications.