 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Amita Biswal | -- | 3552 | 2023-04-20 13:38:44 | | | |
| 2 | Peter Tang | Meta information modification | 3552 | 2023-04-21 04:32:23 | | |
Video Upload Options
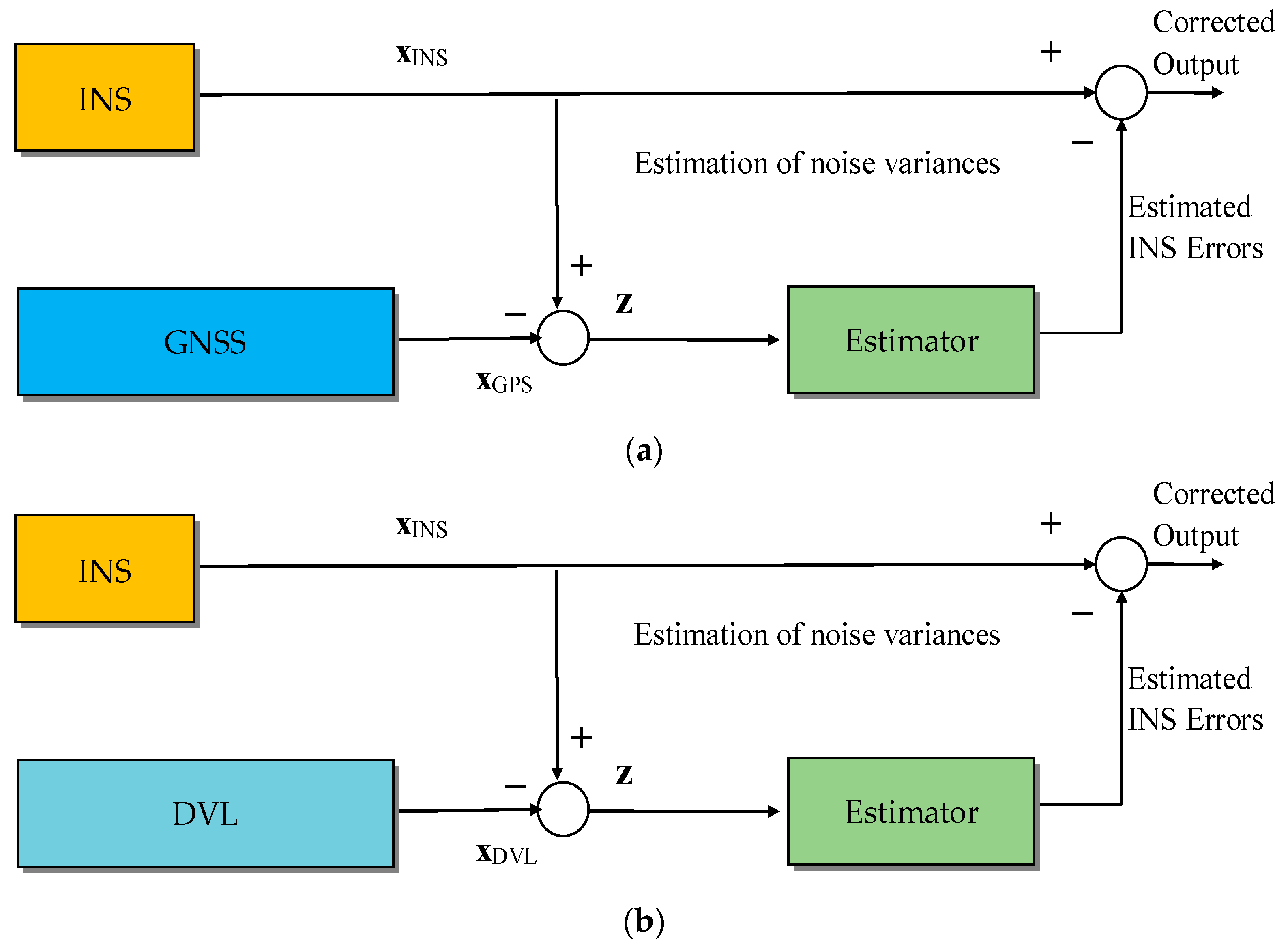
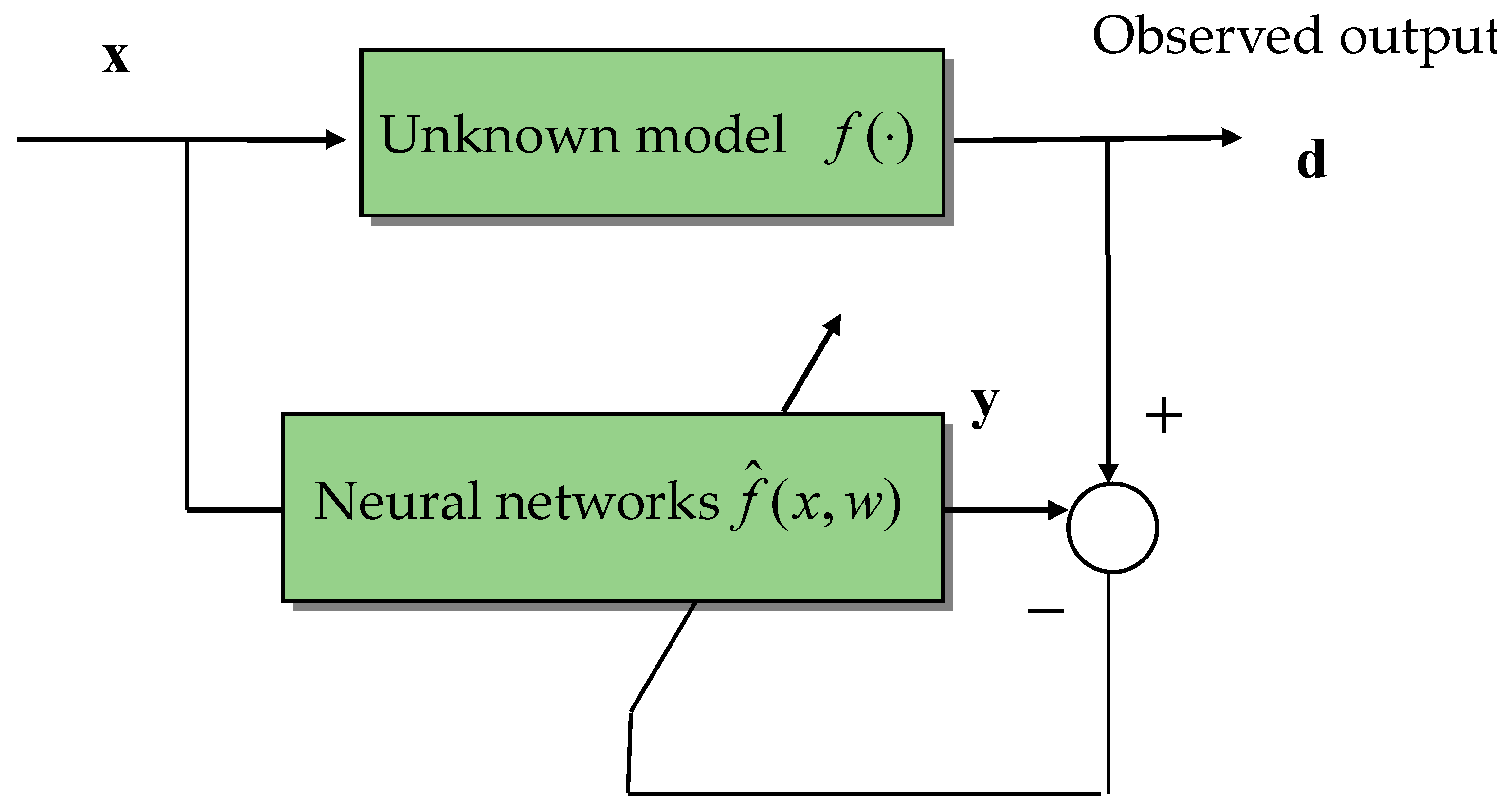
Several machine learning (ML) methodologies are gaining popularity as artificial intelligence (AI) becomes increasingly prevalent. An artificial neural network (ANN) may be used as a “black-box” modeling strategy without the need for a detailed system physical model. It is more reasonable to solely use the input and output data to explain the system’s actions. ANNs have been extensively researched, as artificial intelligence has progressed to enhance navigation performance. In some circumstances, the Global Navigation Satellite System (GNSS) can offer consistent and dependable navigational options. A key advancement in contemporary navigation is the fusion of the GNSS and inertial navigation system (INS). Numerous strategies have been put out to increase the accuracy for jamming, GNSS-prohibited environments, the integration of GNSS/INS or other technologies by means of a Kalman filter as well as to solve the signal blockage issue in metropolitan areas. A neural-network-based fusion approach is suggested to address GNSS outages.
1. Introduction
2. The Use of Neural Networks in the Global Positioning System
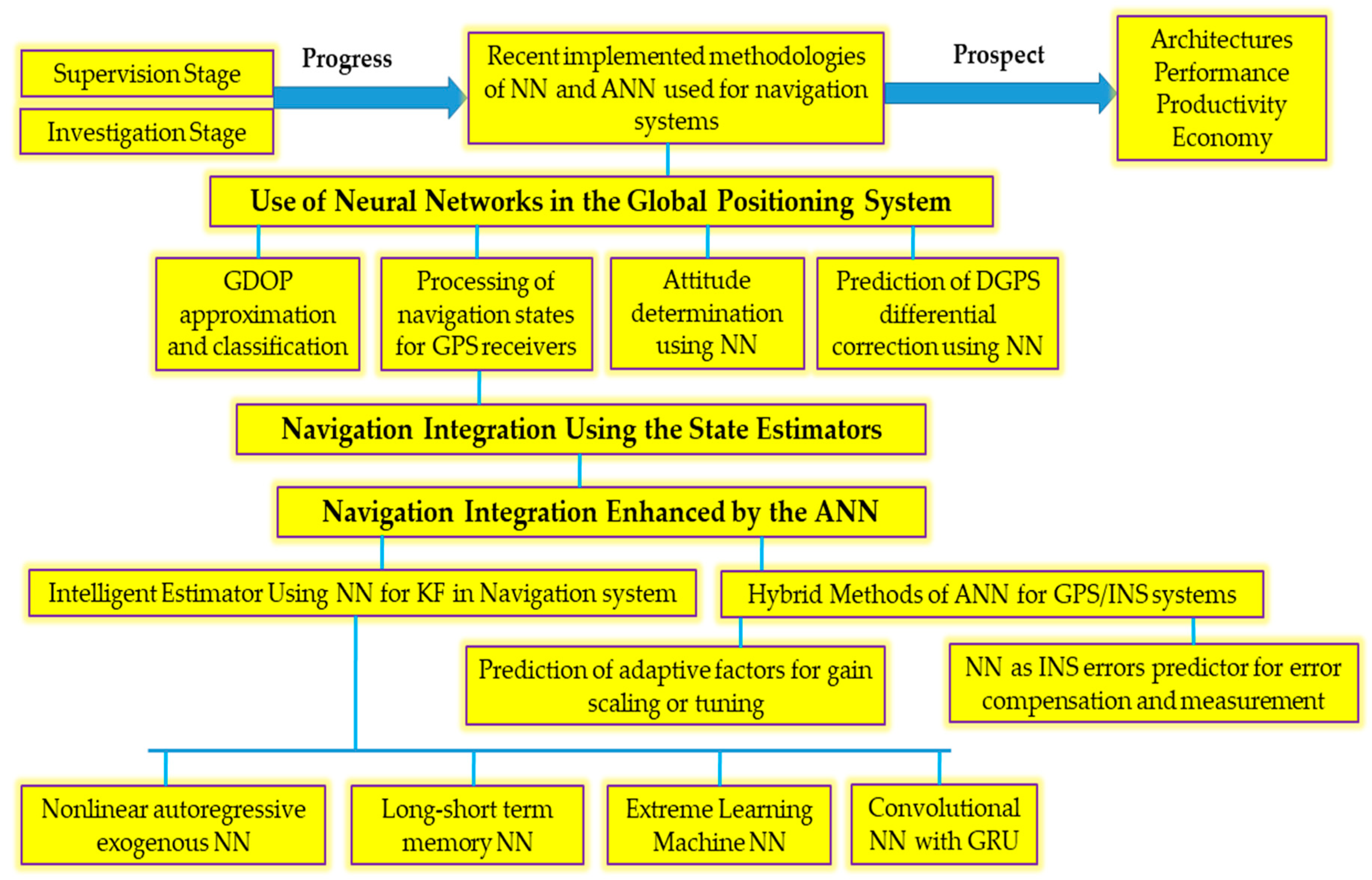
3. Navigation Integration Using the State Estimators
|
Navigation Fusion Algorithm |
Features |
|---|---|
|
Linear Kalman filter algorithm |
|
|
Nonlinear filter algorithms, including the EKF, UKF, and CKF |
|
|
Sequential Monte Carlo (SMC) approaches |
|
|
Adaptive filter algorithms |
|
|
Neural-network-assisted filtering algorithm |
|
|
Deep learning improvement algorithm |
|
4. Navigation Integration Enhanced by the ANN
5. Advantage and Disadvantages of ANN in Navigation System
References
- Wellenhof, B.H.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems, GPS, GLONASS, Galileo, and More; Springer Wien: Vienna, Austria; New York, NY, USA, 2008.
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering; John Wiley & Sons: New York, NY, USA, 1997.
- Mehra, R.K. On-line Identification of Linear Dynamic Systems with Applications to Kalman Filtering. IEEE Trans. Autom. Control 1970, 16, 12–21.
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203.
- Li, X.R.; Shalom, Y.B. Design of an Interacting Multiple Model Algorithm for Air Traffic Control Tracking. IEEE Trans. Control. Syst. Technol. 1993, 1, 186–194.
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y.; Li, X. Enhanced Accuracy GPS Navigation Using the Interacting Multiple Model Estimator. In Proceedings of the IEEE Aerospace Conference, Montana, CA, USA, 10–17 March 2001; Volume 4, pp. 1911–1923.
- Chen, G.; Harigae, M. Using IMM Adaptive Estimator in GPS Positioning. In Proceedings of the 40th SICE Annual Conference, SICE 2001, International Session Papers, Nagoya, Japan, 25–27 July 2001; pp. 25–27.
- Jwo, D.J.; Chung, F.C.; Yu, K.L. GPS/INS Integration Accuracy Enhancement Using the Interacting Multiple Model Nonlinear Filters. J. Appl. Res. Technol. 2013, 11, 496–509.
- Särkkä, S.; Nummenmaa, A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations. IEEE Trans. Autom. Control 2009, 54, 596–600.
- Li, K.; Chang, L.; Hu, B. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness. IEEE Sens. J. 2016, 16, 6966–6976.
- Yun, P.; Wu, P.; He, S. An IMM-VB Algorithm for Hypersonic Vehicle Tracking with Heavy Tailed Measurement Noise. In Proceedings of the 2018 International Conference on Control, Automation and Information Sciences (ICCAIS), Hangzhou, China, 24–27 October 2018; pp. 169–174.
- Zhang, C.; Guo, C.; Zhang, D. Data fusion based on adaptive interacting multiple model for GPS/INS integrated navigation system. Appl. Sci. 2018, 8, 1682.
- Simon, D.; Sherief, H.E. Navigation Satellite Selection using Neural Networks. Neurocomputing 1995, 7, 247–258.
- Ham, D.; Park, H.; Hwang, S.; Kim, K. Neuromorphic electronics based on copying and pasting the brain. Nat. Electron. 2021, 4, 635–644.
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An improved quantum-inspired differential evolution algorithm for deep belief network. IEEE Trans. Instrum. Meas. 2020, 69, 7319–7327.
- Ren, Z.; Zhen, X.; Jiang, Z.; Gao, Z.; Li, Y.; Shi, W. Underactuated control and analysis of single blade installation using a jackup installation vessel and active tugger line force control. Mar. Struct. 2023, 88, 103338.
- Zhao, H.; Yang, X.; Chen, B.; Chen, H.; Deng, W. Bearing fault diagnosis using transfer learning and optimized deep belief network. Meas. Sci. Technol. 2022, 33, 065009.
- Jwo, D.J.; Chin, K.P. Applying Back-propagation Neural Networks to GDOP Approximation. J. Navig. 2002, 54, 97–108.
- Jwo, D.J.; Lai, C.C. Neural Network-Based Geometry, Classification for Navigation Satellite Selection. J. Navig. 2003, 56, 291–304.
- Jwo, D.J.; Lai, C.C. Neural Network-based GPS GDOP Approximation and Classification. GPS Solut. 2007, 11, 51–60.
- Mosavi, M.R.; Sorkhi, M. An Efficient Method for Optimum Selection of GPS Satellites Set using Recurrent Neural Network. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 245–249.
- Mosavi, M.R.; Azami, H. Applying Neural Network Ensembles for Clustering of GPS Satellites. Int. J. Geoinformatics 2011, 7, 7–14.
- Tafazoli, S.; Mosavi, M.R. Performance Improvement of GPS GDOP Approximation Using Recurrent Wavelet Neural Network. J. Geogr. Inf. Syst. 2011, 3, 318–322.
- Azami, H.; Mosavi, M.R.; Sanei, S. Classification of GPS Satellites Using Improved Back Propagation Training Algorithms. Wirel. Pers. Commun. 2013, 71, 789–803.
- Zarei, N. Artificial Intelligence Approaches for GPS GDOP Classification. Int. J. Comput. Appl. 2014, 96, 16–21.
- Azarbad, M.; Azami, H.; Sanei, S.; Ebrahimzadeh, A. New Neural Network-based Approaches for GPS GDOP Classification based on Adaptive Neuro-Fuzzy Inference System, Radial Basis Function, and Improved Bee Algorithm. Appl. Soft Comput. 2014, 25, 285–292.
- Chansarkar, M. Neural Networks in GPS Navigation. GPS Solut. 2000, 4, 14–18.
- Mosavi, M.R. A Practical Approach for Accurate Positioning with L1 GPS Receivers using Neural Networks. Int. J. Intell. Fuzzy Syst. 2006, 17, 159–171.
- Mosavi, M.R. Precise Real-Time Positioning with a Low Cost GPS Engine using Neural Networks. Int. J. Surv. Rev. 2007, 39, 316–327.
- Jwo, D.J.; Pai, C.-F. Incorporation of Neural Network State Estimator for GPS Attitude Determination. J. Navig. 2004, 57, 117–134.
- Jwo, D.J. GPS Navigation Solutions by Analogue Neural Network Least-Squares Processors. J. Navig. 2005, 58, 105–118.
- Julier, S.J.; Uhlmann, J.K.; Durrant-whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 5, 477–482.
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269.
- Arulampalam, M.S.; Maksell, S.; Gordon, N.; Clapp, T. A tutorial of particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188.
- Wan, E.A.; Van der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE Symposium 2000 (AS-SPCC), Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158.
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006.
- Benkouider, S.; Lagraa, N.; Yagoubi, M.B.; Lakas, A. Reducing Complexity of GPS/INS Integration Scheme through Neural Networks. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 53–58.
- Wang, C.-Z.; Kong, L.-W.; Jiang, J.; Lai, Y.-C. Machine learning-based approach to GPS anti jamming. GPS Solut. 2021, 25, 115.
- Krzykowska, K.; Krzykowski, M. Forecasting Parameters of Satellite Navigation Signal through Artificial Neural Networks for the Purpose of Civil Aviation. Int. J. Aerosp. Eng. 2019, 2019, 7632958.
- Khan, I.U.; Ali, T.; Farid, Z.; Scavino, E.; Rahman, M.A.A.; Hamdi, M.; Qiao, G. An improved hybrid indoor positioning system based on surface tessellation artificial neural network. Meas. Control 2020, 53, 1968–1977.
- Kaygisiz, B.H.; Erkmen, I.; Erkmen, A.M. GPS/INS Enhancement for Land Navigation using Neural Network. J. Navig. 2004, 57, 297–310.
- Gingras, D. An Overview of Positioning and Data Fusion Techniques Applied to Land Vehicle Navigation Systems. In Automotive Informatics and Communicative Systems: Principles in Vehicular Networks and Data Exchange; IGI Global: Hershey, PA, USA, 2009; pp. 219–246.
- Aftatah, M.; Lahrech, A.; Abdelouahed, A.; Soulhi, A. GPS/INS/Odometer Data Fusion for Land Vehicle Localization in GPS Denied Environment. Mod. Appl. Sci. 2017, 11, 62.
- Du, S.; Zhang, S.; Gan, X. A hybrid fusion strategy for the land vehicle navigation using MEMS INS, odometer and GNSS. IEEE Access 2020, 8, 152512–152522.
- Chen, Y.; Zhou, P.; Sheng, M.; Liu, K. Overview of the Integrated Navigation System Research Status and its Development Integrated with 5G Communication. In Proceedings of the 7th International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS 2022), Wuhan, China, 18–19 March 2022; Volume XLVI-3/W1-2022, pp. 29–35.
- Wei, W.; Tan, L.; Jin, G.; Lu, L.; Sun, C. A Survey of UAV Visual Navigation Based on Monocular SLAM. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC 2018), Chongqing, China, 14–16 December 2018; pp. 1849–1853.
- Li, P.; Zhang, X.; Xu, X. Novel Terrain Integrated Navigation System Using Neural Network Aided Kalman Filter. In Proceedings of the Sixth International Conference on Natural Computation (ICNC), Yantai, China, 10–12 August 2010; pp. 445–448.
- Bao, J.; Li, D.; Qiao, X.; Rauschenbach, T. Integrated navigation for autonomous underwater vehicles in aquaculture: A review. Inf. Process. Agric. 2020, 7, 139–151.
- Zhang, X.; Mu, X.; Liu, H.; He, B.; Yan, T. Application of Modified EKF Based on Intelligent Data Fusion in AUV Navigation; IEEE Underwater Technology (UT): Kaohsiung, Taiwan, 2019.
- Shafie, A.E.; Noureldin, A. Sensor Integration for Satellite-Based Sensor Navigation Utilizing Neural Networks. IEEE Trans. Neural Netw. 2007, 18, 589–594.
- Noureldin, A.; Shafie, A.E.; Bayoumi, M. GPS/INS Integration Utilizing Dynamic Neural Networks for Vehicular Navigation. Inf. Fusion 2011, 12, 48–57.
- Chen, L.; Fang, J. A hybrid prediction method for bridging GPS outages in high-precision POS application. IEEE Trans. Instrum. Meas. 2014, 63, 1656–1665.
- Chiang, K.W.; Huang, Y.W. An intelligent navigator for seamless INS/GPS integrated land vehicle navigation applications. Appl. Soft Comput. 2008, 8, 722–733.
- Chiang, K.W.; Noureldin, A.; El-Sheimy, N. Constructive neural-networks-based MEMS/GPS integration scheme. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 582–594.
- Jwo, D.J.; Chang, C.-S.; Lin, C.-H. Neural Network Aided Adaptive Kalman Filtering for GPS Applications. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; pp. 3686–3691.
- Jwo, D.J.; Huang, H.-C. Neural Network Aided Adaptive Extended Kalman Filtering Approach for DGPS Positioning. J. Navig. 2004, 57, 449–463.
- Jwo, D.J.; Chen, J.J. GPS/INS navigation filter designs using neural network with optimization techniques. In Proceedings of the Advances in Natural Computation: Second International Conference, ICNC 2006, Xi’an, China, 24–28 September 2006; pp. 461–470.
- Wang, J.J.; Ding, W.; Wang, J. Improving Adaptive Kalman Filter in GPS/SDINS Integration with Neural Network. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 571–578.
- Wang, J.J.; Wang, J.; Sinclair, D.; Watts, L. Neural Network Aided Kalman Filtering for Integrated GPS/INS Geo-Referencing Platform. In Proceedings of the 5th International Symposium on Mobile Mapping Technology, Padua, Italy, 29–31 May 2007; pp. 1–6.
- Ibrahim, F.; Tascillo, A.; Holou, N.A. DGPS/INS Integration Using Neural Network Methodology. In Proceedings of the 12th IEEE Internationals Conference on Tools with Artificial Intelligence, ICTAI 2000, Vancouver, BC, Canada, 15 November 2000; pp. 114–121.
- Pukhov, E.; Cohen, H.I. Novel Approach to Improve Performance of Inertial Navigation System Via Neural Network. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 746–756.
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU Dead-reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595.
- Liu, Y.; Luo, Q.; Liang, W.; Zhou, Y. GPS/INS Integrated Navigation with LSTM Neural Network. In Proceedings of the 2021 4th International Conference on Intelligent Autonomous Systems (ICoIAS), Wuhan, China, 14–16 May 2021; pp. 345–350.

