 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Srijeet Halder | -- | 3887 | 2023-04-19 17:39:57 | | | |
| 2 | Sirius Huang | -5 word(s) | 3882 | 2023-04-20 10:25:27 | | | | |
| 3 | Sirius Huang | Meta information modification | 3882 | 2023-04-21 07:56:32 | | |
Video Upload Options
Regular inspection and monitoring of buildings and infrastructure, that is collectively called the built environment herein, is critical. The built environment includes commercial and residential buildings, roads, bridges, tunnels, and pipelines. Automation and robotics can aid in reducing errors and increasing the efficiency of inspection tasks. As a result, robotic inspection and monitoring of the built environment has become a significant research topic in recent years.
1. Introduction
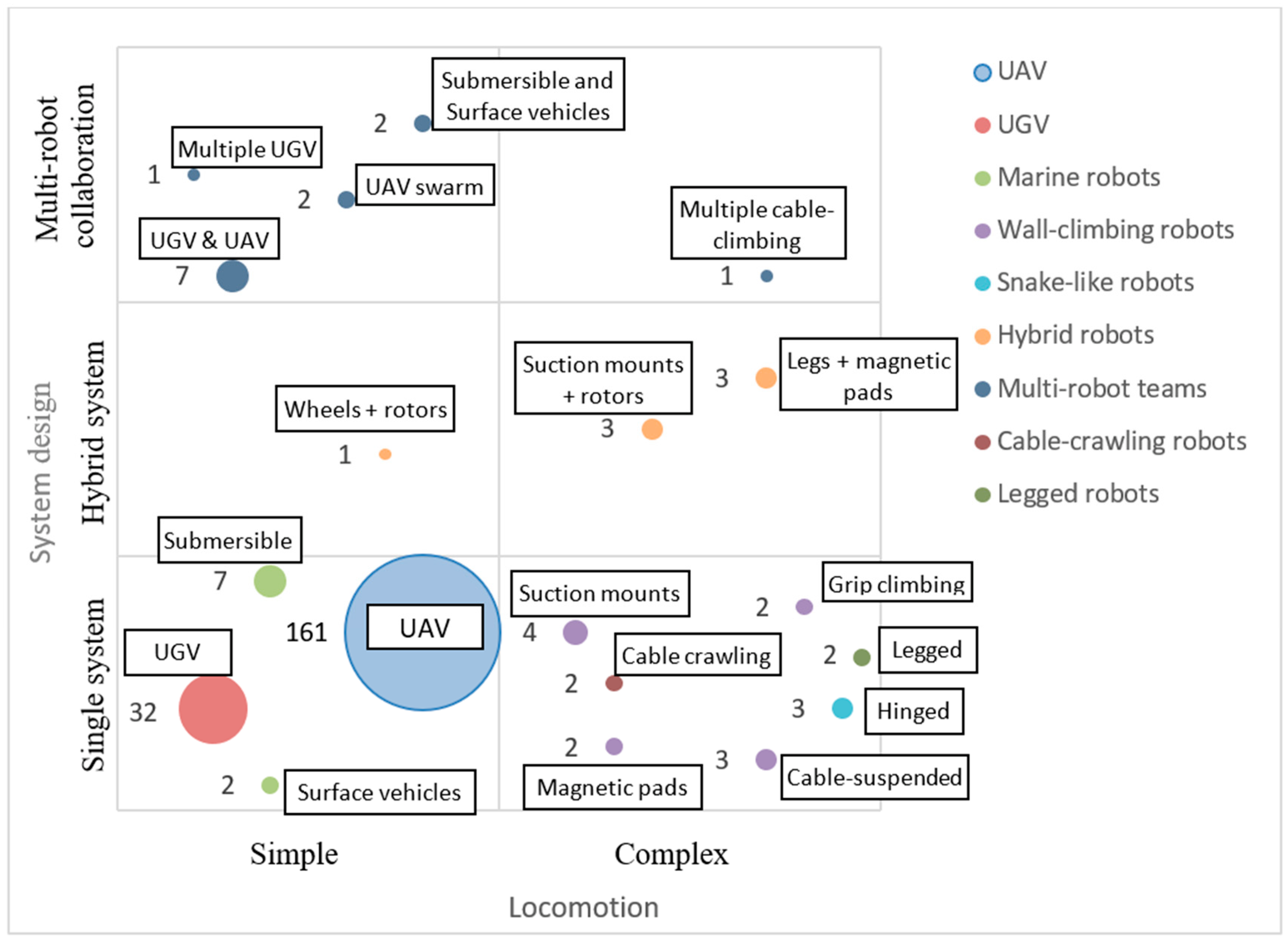
The following sections present an in-depth qualitative content analysis of 269 papers on the use of robots for the inspection and monitoring of buildings and infrastructure. The researchers found nine different types of robotic systems, with unmanned aerial vehicles (UAVs) being the most common, followed by unmanned ground vehicles (UGVs). The study also found five different applications of robots in inspection and monitoring, namely, maintenance inspection, construction quality inspection, construction progress monitoring, as-built modeling, and safety inspection. Common research areas investigated by researchers include autonomous navigation, knowledge extraction, motion control systems, sensing, multi-robot collaboration, safety implications, and data transmission. The findings provide insight into the recent research and developments in the field of robotic inspection and monitoring of the built environment and will benefit researchers, and construction and facility managers, in developing and implementing new robotic solutions.
2. Unmanned Aerial Vehicle (UAV)
-
UAVs can hover anywhere to take photos.
-
UAVs can zoom in and focus on a small region of interest.
-
UAV operation should be simple, and the operator can get started without professional training.
-
UAVs should have a long enough flight time to improve operational efficiency.
-
UAVs should be capable of autonomous flight.
-
UAVs should be small enough for transportation and maintenance.
3. Unmanned Ground Vehicles (UGV)
4. Wall-Climbing Robots
5. Cable-Crawling Robots
6. Marine Robots
7. Hinged Microbots
8. Legged Robots
9. Hybrid Robots
10. Multi-Robot Systems
References
- Vo-Tran, H.; Kanjanabootra, S. Information Sharing Problems among Stakeholders in the Construction Industry at the Inspection Stage: A Case Study. In Proceedings of the CIB World Building Congres: Construction and Society, Brisbane, Australia, 5–9 May 2013; pp. 50–63.
- Hallermann, N.; Morgenthal, G.; Rodehorst, V. Unmanned Aerial Systems (UAS)—Case Studies of Vision Based Monitoring of Ageing Structures. In Proceedings of the International Symposium Non-Destructive Testing in Civil Engineering (NDT-CE), Berlin, Germany, 15–17 September 2015; pp. 15–17.
- Lattanzi, D.; Miller, G. Review of Robotic Infrastructure Inspection Systems. J. Infrastruct. Syst. 2017, 23, 04017004.
- Pinto, L.; Bianchini, F.; Nova, V.; Passoni, D. Low-Cost Uas Photogrammetry for Road Infrastructures’ Inspection. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43B2, 1145–1150.
- Bulgakov, A.; Sayfeddine, D. Air Conditioning Ducts Inspection and Cleaning Using Telerobotics. Procedia Eng. 2016, 164, 121–126.
- Wang, Y.; Su, J. Automated Defect and Contaminant Inspection of HVAC Duct. Autom. Constr. 2014, 41, 15–24.
- Inzartsev, A.; Eliseenko, G.; Panin, M.; Pavin, A.; Bobkov, V.; Morozov, M. Underwater Pipeline Inspection Method for AUV Based on Laser Line Recognition: Simulation Results. In Proceedings of the 2019 IEEE Underwater Technology (UT), Kaohsiung, Taiwan, 16–19 April 2019.
- Kreuzer, E.; Pinto, F.C. Sensing the Position of a Remotely Operated Underwater Vehicle. In Proceedings of the Theory and Practice of Robots and Manipulators; Morecki, A., Bianchi, G., Jaworek, K., Eds.; Springer: Vienna, Austria, 1995; pp. 323–328.
- Brunete, A.; Hernando, M.; Torres, J.E.; Gambao, E. Heterogeneous Multi-Configurable Chained Microrobot for the Exploration of Small Cavities. Autom. Constr. 2012, 21, 184–198.
- Tan, Y.; Li, S.; Liu, H.; Chen, P.; Zhou, Z. Automatic Inspection Data Collection of Building Surface Based on BIM and UAV. Autom. Constr. 2021, 131, 103881.
- Torok Matthew, M.; Golparvar-Fard, M.; Kochersberger Kevin, B. Image-Based Automated 3D Crack Detection for Post-Disaster Building Assessment. J. Comput. Civ. Eng. 2014, 28, A4014004.
- Khan, F.; Ellenberg, A.; Mazzotti, M.; Kontsos, A.; Moon, F.; Pradhan, A.; Bartoli, I. Investigation on Bridge Assessment Using Unmanned Aerial Systems. In Proceedings of the Structures Congress 2015, Portland, OR, USA, 23–25 April 2015; pp. 404–413.
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin, Germany, 2016; ISBN 978-3-319-32552-1.
- Birk, A.; Pfingsthorn, M.; Bulow, H. Advances in Underwater Mapping and Their Application Potential for Safety, Security, and Rescue Robotics (SSRR). In Proceedings of the 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012.
- Ruiz, R.D.B.; Lordsleem Jr, A.C.; Rocha, J.H.A.; Irizarry, J. Unmanned Aerial Vehicles (UAV) as a Tool for Visual Inspection of Building Facades in AEC+FM Industry. Constr. Innov. 2021, 22, 1155–1170.
- Agnisarman, S.; Lopes, S.; Chalil Madathil, K.; Piratla, K.; Gramopadhye, A. A Survey of Automation-Enabled Human-in-the-Loop Systems for Infrastructure Visual Inspection. Autom. Constr. 2019, 97, 52–76.
- Halder, S.; Afsari, K.; Chiou, E.; Patrick, R.; Hamed, K.A. Construction Inspection & Monitoring with Quadruped Robots in Future Human-Robot Teaming. J. Build. Eng. 2023, 65, 105814.
- Lim, R.S.; La, H.M.; Shan, Z.; Sheng, W. Developing a Crack Inspection Robot for Bridge Maintenance. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 6288–6293.
- Patel, T.; Suthar, V.; Bhatt, N. Application of Remotely Piloted Unmanned Aerial Vehicle in Construction Management BT-Recent Trends in Civil Engineering; Pathak, K.K., Bandara, J.M.S.J., Agrawal, R., Eds.; Springer: Singapore, 2021; pp. 319–329.
- Phung, M.D.; Quach, C.H.; Dinh, T.H.; Ha, Q. Enhanced Discrete Particle Swarm Optimization Path Planning for UAV Vision-Based Surface Inspection. Autom. Constr. 2017, 81, 25–33.
- Whang, S.-H.; Kim, D.-H.; Kang, M.-S.; Cho, K.; Park, S.; Son, W.-H. Development of a Flying Robot System for Visual Inspection of Bridges; International Society for Structural Health Monitoring of Intelligent Infrastructure (ISHMII): Winnipeg, MB, Canada, 2007.
- Asadi, K.; Kalkunte Suresh, A.; Ender, A.; Gotad, S.; Maniyar, S.; Anand, S.; Noghabaei, M.; Han, K.; Lobaton, E.; Wu, T. An Integrated UGV-UAV System for Construction Site Data Collection. Autom. Constr. 2020, 112, 103068.
- Kim, P.; Park, J.; Cho, Y.K.; Kang, J. UAV-Assisted Autonomous Mobile Robot Navigation for as-Is 3D Data Collection and Registration in Cluttered Environments. Autom. Constr. 2019, 106, 102918.
- Lee, J.H.; Park, J.; Jang, B. Design of Robot Based Work Progress Monitoring System for the Building Construction Site. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 17–19 October 2018; pp. 1420–1422.
- Kamagaluh, B.; Kumar, J.S.; Virk, G.S. Design of Multi-Terrain Climbing Robot for Petrochemical Applications. In Proceedings of the Adaptive Mobile Robotics, Baltimore, MD, USA, 23–26 July 2012; pp. 639–646.
- Katrasnik, J.; Pernus, F.; Likar, B. A Climbing-Flying Robot for Power Line Inspection. In Climbing and Walking Robots; Miripour, B., Ed.; IntechOpen: Rijeka, Croatia, 2010; pp. 95–110.
- Mattar, R.A.; Kalai, R. Development of a Wall-Sticking Drone for Non-Destructive Ultrasonic and Corrosion Testing. Drones 2018, 2, 8.
- Irizarry, J.; Costa, D. Exploratory Study of Potential Applications of Unmanned Aerial Systems for Construction Management Tasks. J. Manag. Eng. 2016, 32, 05016001.
- Razali, S.N.M.; Kaamin, M.; Razak, S.N.A.; Hamid, N.B.; Ahmad, N.F.A.; Mokhtar, M.; Ngadiman, N.; Sahat, S. Application of UAV and Csp1 Matrix for Building Inspection at Muzium Negeri, Seremban. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 1366–1372.
- Moore, J.; Tadinada, H.; Kirsche, K.; Perry, J.; Remen, F.; Tse, Z.T.H. Facility Inspection Using UAVs: A Case Study in the University of Georgia Campus. Int. J. Remote Sens. 2018, 39, 7189–7200.
- Biswas, S.; Sharma, R. Goal-Aware Navigation of Quadrotor UAV for Infrastructure Inspection. In Proceedings of the AIAA Scitech 2019 Forum, American Institute of Aeronautics and Astronautics, San Diego, CA, USA, 7–11 January 2019.
- Mao, Z.; Yan, Y.; Wu, J.; Hajjar, J.F.; Padlr, T. Towards Automated Post-Disaster Damage Assessment of Critical Infrastructure with Small Unmanned Aircraft Systems. In Proceedings of the 2018 IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 23–24 October 2018.
- Walczyński, M.; Bożejko, W.; Skorupka, D. Parallel Optimization Algorithm for Drone Inspection in the Building Industry. AIP Conf. Proc. 2017, 1863, 230014.
- Vacca, G.; Furfaro, G.; Dessì, A. The Use of the Uav Images for the Building 3D Model Generation. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Dar es Salaam, TN, USA, 29 August 2018; Volume 42, pp. 217–223.
- Taj, G.; Anand, S.; Haneefi, A.; Kanishka, R.P.; Mythra, D.H.A. Monitoring of Historical Structures Using Drones; IOP Publishing Ltd.: Bristol, UK, 2020; Volume 955.
- Saifizi, M.; Syahirah, N.; Mustafa, W.A.; Rahim, H.A.; Nasrudin, M.W. Using Unmanned Aerial Vehicle in 3D Modelling of UniCITI Campus to Estimate Building Size; IOP Publishing Ltd.: Bristol, UK, 2021; Volume 1962.
- Hament, B.; Oh, P. Unmanned Aerial and Ground Vehicle (UAV-UGV) System Prototype for Civil Infrastructure Missions. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; Mohanty, S., Corcoran, P., Li, H., Sengupta, A., Lee, J., Eds.; IEEE: Piscataway, NJ, USA, 2018.
- Roca, D.; Lagüela, S.; Díaz-Vilariño, L.; Armesto, J.; Arias, P. Low-Cost Aerial Unit for Outdoor Inspection of Building Façades. Autom. Constr. 2013, 36, 128–135.
- Lin, J.J.; Han, K.K.; Golparvar-Fard, M. A Framework for Model-Driven Acquisition and Analytics of Visual Data Using UAVs for Automated Construction Progress Monitoring. In Proceedings of the Computing in Civil Engineering, Austin, TX, USA, 21–23 June 2015; pp. 156–164.
- Keyvanfar, A.; Shafaghat, A.; Awanghamat, A. Optimization and Trajectory Analysis of Drone’s Flying and Environmental Variables for 3D Modelling the Construction Progress Monitoring. Int. J. Civ. Eng. 2021, 20, 363–388.
- Freimuth, H.; König, M. Planning and Executing Construction Inspections with Unmanned Aerial Vehicles. Autom. Constr. 2018, 96, 540–553.
- Hamledari, H.; Davari, S.; Azar, E.R.; McCabe, B.; Flager, F.; Fischer, M. UAV-Enabled Site-to-BIM Automation: Aerial Robotic- and Computer Vision-Based Development of As-Built/As-Is BIMs and Quality Control. In Proceedings of the Construction Research Congress 2018: Construction Information Technology—Selected Papers from the Construction Research Congress 2018, New Orleans, LA, USA, 2–4 April 2018; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2018; pp. 336–346.
- Kayhani, N.; McCabe, B.; Abdelaal, A.; Heins, A.; Schoellig, A.P. Tag-Based Indoor Localization of UAVs in Construction Environments: Opportunities and Challenges in Practice. In Proceedings of the Construction Research Congress 2020, Tempe, AZ, USA, 8–10 March 2020; pp. 226–235.
- Previtali, M.; Barazzetti, L.; Brumana, R.; Roncoroni, F. Thermographic Analysis from Uav Platforms for Energy Efficiency Retrofit Applications. J. Mob. Multimed. 2013, 9, 66–82.
- Teixeira, J.M.; Ferreira, R.; Santos, M.; Teichrieb, V. Teleoperation Using Google Glass and Ar, Drone for Structural Inspection. In Proceedings of the 2014 XVI Symposium on Virtual and Augmented Reality, Piata Salvador, Brazil, 12–15 May 2014; pp. 28–36.
- Esfahan, N.R.; Attalla, M.; Khurshid, K.; Saeed, N.; Huang, T.; Razavi, S. Employing Unmanned Aerial Vehicles (UAV) to Enhance Building Roof Inspection Practices: A Case Study. In Proceedings of the Canadian Society for Civil Engineering Annual Conference, London, ON, Canada, 1–4 June 2016; Volume 1, pp. 296–305.
- Chen, K.; Reichard, G.; Xu, X. Opportunities for Applying Camera-Equipped Drones towards Performance Inspections of Building Facades. In Proceedings of the ASCE International Conference on Computing in Civil Engineering 2019, Atlanta, GA, USA, 17–19 June 2019; pp. 113–120.
- Oudjehane, A.; Moeini, S.; Baker, T. Construction Project Control and Monitoring with the Integration of Unmanned Aerial Systems with Virtual Design and Construction Models; Canadian Society for Civil Engineering: Vancouver, BC, Canada, 2017; Volume 1, pp. 381–406.
- Choi, J.; Yeum, C.M.; Dyke, S.J.; Jahanshahi, M.; Pena, F.; Park, G.W. Machine-Aided Rapid Visual Evaluation of Building Façades. In Proceedings of the 9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018.
- Mavroulis, S.; Andreadakis, E.; Spyrou, N.-I.; Antoniou, V.; Skourtsos, E.; Papadimitriou, P.; Kasssaras, I.; Kaviris, G.; Tselentis, G.-A.; Voulgaris, N.; et al. UAV and GIS Based Rapid Earthquake-Induced Building Damage Assessment and Methodology for EMS-98 Isoseismal Map Drawing: The June 12, 2017 Mw 6.3 Lesvos (Northeastern Aegean, Greece) Earthquake. Int. J. Disaster Risk Reduct. 2019, 37, 101169.
- Daniel Otero, L.; Gagliardo, N.; Dalli, D.; Otero, C.E. Preliminary SUAV Component Evaluation for Inspecting Transportation Infrastructure Systems. In Proceedings of the 2016 Annual IEEE Systems Conference (SysCon), Orlando, FL, USA, 18–21 April 2016.
- Pereira, F.C.; Pereira, C.E. Embedded Image Processing Systems for Automatic Recognition of Cracks Using UAVs. IFAC-PapersOnLine 2015, 28, 16–21.
- Watanabe, K.; Moritoki, N.; Nagai, I. Attitude Control of a Camera Mounted-Type Tethered Quadrotor for Infrastructure Inspection. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 6252–6257.
- Murtiyoso, A.; Koehl, M.; Grussenmeyer, P.; Freville, T. Acquisition and Processing Protocols for Uav Images: 3d Modeling of Historical Buildings Using Photogrammetry. In Proceedings of the 26th International CIPA Symposium 2017, Ottawa, ON, Canada, 28 August–1 September 2017; Volume 4, pp. 163–170.
- Saifizi, M.; Azani Mustafa, W.; Syahirah Mohammad Radzi, N.; Aminudin Jamlos, M.; Zulkarnain Syed Idrus, S. UAV Based Image Acquisition Data for 3D Model Application. IOP Conf. Ser. Mater. Sci. Eng. 2020, 917, 012074.
- Khaloo, A.; Lattanzi, D. Integrating 3D Computer Vision and Robotic Infrastructure Inspection. In Proceedings of the 11th International Workshop on Structural Health Monitoring (IWSHM), Stanford, CA, USA, 12–14 September 2017; Volume 2, pp. 3202–3209.
- Kersten, J.; Rodehorst, V.; Hallermann, N.; Debus, P.; Morgenthal, G. Potentials of Autonomous UAS and Automated Image Analysis for Structural Health Monitoring. In Proceedings of the IABSE Symposium 2018, Nantes, France, 19–21 September 2018; pp. S24–S119.
- Kakillioglu, B.; Velipasalar, S.; Rakha, T. Autonomous Heat Leakage Detection from Unmanned Aerial Vehicle-Mounted Thermal Cameras. In Proceedings of the 12th International Conference, Jeju, Republic of Korea, 25–28 October 2018.
- Gomez, J.; Tascon, A. A Protocol for Using Unmanned Aerial Vehicles to Inspect Agro-Industrial Buildings. Inf. Constr. 2021, 73, e421.
- Dergachov, K.; Kulik, A. Impact-Resistant Flying Platform for Use in the Urban Construction Monitoring. In Methods and Applications of Geospatial Technology in Sustainable Urbanism; IGI Global: Pennsylvania, PA, USA, 2021; pp. 520–551.
- Kucuksubasi, F.; Sorguc, A.G. Transfer Learning-Based Crack Detection by Autonomous UAVs. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction (ISARC), Berlin, Germany, 20–25 July 2018; Teizer, J., Ed.; International Association for Automation and Robotics in Construction (IAARC): Taipei, Taiwan, 2018; pp. 593–600.
- Bruggemann, T. Automated Feature-Driven Flight Planning for Airborne Inspection of Large Linear Infrastructure Assets. IEEE Trans. Autom. Sci. Eng. 2022, 19, 804–817.
- Nakata, K.; Umemoto, K.; Kaneko, K.; Ryusuke, F. Development and Operation Of Wire Movement Type Bridge Inspection Robot System ARANEUS. In Proceedings of the International Symposium on Applied Science, Bali, Indonesia, 24–25 October 2019; Kalpa Publications in Engineering: Manchester, UK, 2020; pp. 168–174.
- Lyu, J.; Zhao, T.; Xu, G. Research on UAV’s Fixed-Point Cruise Method Aiming at the Appearance Defects of Buildings. In Proceedings of the ACM International Conference Proceeding Series; Association for Computing Machinery: New York, NY, USA, 2021; pp. 783–787.
- Vazquez-Nicolas, J.M.; Zamora, E.; Gonzalez-Hernandez, I.; Lozano, R.; Sossa, H. Towards Automatic Inspection: Crack Recognition Based on Quadrotor UAV-Taken Images. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 654–659.
- Choi, Y.; Payan, A.P.; Briceno, S.I.; Mavris, D.N. A Framework for Unmanned Aerial Systems Selection and Trajectory Generation for Imaging Service Missions. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018.
- Zhenga, Z.J.; Pana, M.; Pan, W. Virtual Prototyping-Based Path Planning of Unmanned Aerial Vehicles for Building Exterior Inspection. In Proceedings of the 2020 37th ISARC, Kitakyushu, Japan, 27–28 October 2020; pp. 16–23.
- Debus, P.; Rodehorst, V. Multi-Scale Flight Path Planning for UAS Building Inspection; Lecture Notes in Civil Engineering; Springer: Berlin, Germany, 2021; Volume 98, p. 1085.
- Freimuth, H.; Müller, J.; König, M. Simulating and Executing UAV-Assisted Inspections on Construction Sites. In Proceedings of the 2017 34rd ISARC, Taipei, Taiwan, 28 June–1 July 2017; pp. 647–654.
- Sa, I.; Corke, P. Vertical Infrastructure Inspection Using a Quadcopter and Shared Autonomy Control; Springer Tracts in Advanced Robotics; Springer: Berlin, Germany, 2014; Volume 92, p. 232.
- Hamledari, H.; Davari, S.; Sajedi, S.O.; Zangeneh, P.; McCabe, B.; Fischer, M. UAV Mission Planning Using Swarm Intelligence and 4D BIMs in Support of Vision-Based Construction Progress Monitoring and as-Built Modeling. In Proceedings of the Construction Research Congress 2018: Construction Information Technology-Selected Papers from the Construction Research Congress 2018, New Orleans, LA, USA, 2–4 April 2018; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2018; pp. 43–53.
- Kayhani, N.; Zhao, W.; McCabe, B.; Schoellig, A.P. Tag-Based Visual-Inertial Localization of Unmanned Aerial Vehicles in Indoor Construction Environments Using an on-Manifold Extended Kalman Filter. Autom. Constr. 2022, 135, 104112.
- Vanegas, F.; Gaston, K.; Roberts, J.; Gonzalez, F. A Framework for UAV Navigation and Exploration in GPS-Denied Environments. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019.
- Usenko, V.; von Stumberg, L.; Stückler, J.; Cremers, D. TUM Flyers: Vision—Based MAV Navigation for Systematic Inspection of Structures; Springer Tracts in Advanced Robotics; Springer: Berlin, Germany, 2020; Volume 136, p. 209.
- Rea, P.; Ottaviano, E.; Castillo-Garcia, F.; Gonzalez-Rodriguez, A. Inspection Robotic System: Design and Simulation for Indoor and Outdoor Surveys; Machado, J., Soares, F., Trojanowska, J., Yildirim, S., Eds.; Springer: Berlin, Germany, 2022; pp. 313–321.
- Gibb, S.; La, H.M.; Le, T.; Nguyen, L.; Schmid, R.; Pham, H. Nondestructive Evaluation Sensor Fusion with Autonomous Robotic System for Civil Infrastructure Inspection. J. Field Robot. 2018, 35, 988–1004.
- Nitta, Y.; Nishitani, A.; Iwasaki, A.; Watakabe, M.; Inai, S.; Ohdomari, I. Damage Assessment Methodology for Nonstructural Components with Inspection Robot. Key Eng. Mater. 2013, 558, 297–304.
- Watanabe, A.; Even, J.; Morales, L.Y.; Ishi, C. Robot-Assisted Acoustic Inspection of Infrastructures-Cooperative Hammer Sounding Inspection. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5942–5947.
- Phillips, S.; Narasimhan, S. Automating Data Collection for Robotic Bridge Inspections. J. Bridge Eng. 2019, 24, 04019075.
- Asadi, K.; Jain, R.; Qin, Z.; Sun, M.; Noghabaei, M.; Cole, J.; Han, K.; Lobaton, E. Vision-Based Obstacle Removal System for Autonomous Ground Vehicles Using a Robotic Arm. In Proceedings of the ASCE International Conference on Computing in Civil Engineering 2019, Atlanta, GA, USA, 17–19 June 2019; pp. 328–335.
- Kim, P.; Chen, J.; Kim, J.; Cho, Y.K. SLAM-Driven Intelligent Autonomous Mobile Robot Navigation for Construction Applications. In Proceedings of the Advanced Computing Strategies for Engineering, Lausanne, Switzerland, 10–13 June 2018; Smith, I.F.C., Domer, B., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 254–269.
- Davidson, N.C.; Chase, S.B. Initial Testing of Advanced Ground-Penetrating Radar Technology for the Inspection of Bridge Decks: The HERMES and PERES Bridge Inspectors. In Proceedings of the SPIE Proceedings, Newport Beach, CA, USA, 1 February 1999; Volume 3587, pp. 180–185.
- Dobmann, G.; Kurz, J.H.; Taffe, A.; Streicher, D. Development of Automated Non-Destructive Evaluation (NDE) Systems for Reinforced Concrete Structures and Other Applications. In Non-Destructive Evaluation of Reinforced Concrete Structures; Maierhofer, C., Reinhardt, H.-W., Dobmann, G., Eds.; Woodhead Publishing: Sawston, UK, 2010; Volume 2, pp. 30–62. ISBN 978-1-84569-950-5.
- Gibb, S.; Le, T.; La, H.M.; Schmid, R.; Berendsen, T. A Multi-Functional Inspection Robot for Civil Infrastructure Evaluation and Maintenance. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2672–2677.
- Massaro, A.; Savino, N.; Selicato, S.; Panarese, A.; Galiano, A.; Dipierro, G. Thermal IR and GPR UAV and Vehicle Embedded Sensor Non-Invasive Systems for Road and Bridge Inspections. In Proceedings of the 2021 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4.0&IoT), Rome, Italy, 7–9 June 2021; pp. 248–253.
- Kanellakis, C.; Fresk, E.; Mansouri, S.; Kominiak, D.; Nikolakopoulos, G. Towards Visual Inspection of Wind Turbines: A Case of Visual Data Acquisition Using Autonomous Aerial Robots. IEEE Access 2020, 8, 181650–181661.
- McCrea, A.; Chamberlain, D.A. Towards the Development of a Bridge Inspecting Automated Device. In Proceedings of the Automation and Robotics in Construction X, Houston, TX, USA, 26 May 1993; Watson, G.H., Tuccker, R.L., Walters, J.K., Eds.; International Association for Automation and Robotics in Construction (IAARC): Chennai, India, 1993; pp. 269–276.
- Mu, H.; Li, Y.; Chen, D.; Li, J.; Wang, M. Design of Tank Inspection Robot Navigation System Based on Virtual Reality. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 1773–1778.
- Moselhi, O.; Shehab-Eldeen, T. Automated Detection of Surface Defects in Water and Sewer Pipes. Autom. Constr. 1999, 8, 581–588.
- Liu, K.P.; Luk, B.L.; Tong, F.; Chan, Y.T. Application of Service Robots for Building NDT Inspection Tasks. Ind. Robot 2011, 38, 58–65.
- Barry, N.; Fisher, E.; Vaughan, J. Modeling and Control of a Cable-Suspended Robot for Inspection of Vertical Structures. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2016; Volume 744, p. 12071.
- Aracil, R.; Saltarén, R.J.; Almonacid, M.; Azorín, J.M.; Sabater, J.M. Climbing Parallel Robots Morphologies. IFAC Proc. Volume 2000, 33, 471–476.
- Esser, B.; Huston, D.R.; Esser, B.; Huston, D.R. Versatile Robotic Platform for Structural Health Monitoring and Surveillance. Smart Struct. Syst. 2005, 1, 325.
- Schempf, H. Neptune: Above-Ground Storage Tank Inspection Robot System. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; IEEE: Piscataway, NJ, USA, 1994; Volume 2, pp. 1403–1408.
- Caccia, M.; Robino, R.; Bateman, W.; Eich, M.; Ortiz, A.; Drikos, L.; Todorova, A.; Gaviotis, I.; Spadoni, F.; Apostolopoulou, V. MINOAS a Marine INspection RObotic Assistant: System Requirements and Design. IFAC Proc. Vol. 2010, 43, 479–484.
- Longo, D.; Muscato, G.; Sessa, S. Simulator for Locomotion Control of the Alicia3 Climbing Robot. In Climbing and Walking Robots; Tokhi, M.O., Virk, G.S., Hossain, M.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 843–850.
- Kouzehgar, M.; Krishnasamy Tamilselvam, Y.; Vega Heredia, M.; Rajesh Elara, M. Self-Reconfigurable Façade-Cleaning Robot Equipped with Deep-Learning-Based Crack Detection Based on Convolutional Neural Networks. Autom. Constr. 2019, 108, 102959.
- Hernando, M.; Brunete, A.; Gambao, E. ROMERIN: A Modular Climber Robot for Infrastructure Inspection. IFAC-Paper 2019, 52, 424–429.
- Hou, S.; Dong, B.; Wang, H.; Wu, G. Inspection of Surface Defects on Stay Cables Using a Robot and Transfer Learning. Autom. Constr. 2020, 119, 103382.
- Kajiwara, H.; Hanajima, N.; Kurashige, K.; Fujihira, Y. Development of Hanger-Rope Inspection Robot for Suspension Bridges. J. Robot. Mechatron. 2019, 31, 855–862.
- Boreyko, A.A.; Moun, S.A.; Scherbatyuk, A.P. Precise UUV Positioning Based on Images Processing for Underwater Construction Inspection | Pacific/Asia Offshore Mechanics Symposium | OnePetro. In Proceedings of the The Eighth ISOPE Pacific/Asia Offshore Mechanics Symposium, Bangkok, Thailand, 10–14 November 2008; pp. 14–20.
- Atyabi, A.; MahmoudZadeh, S.; Nefti-Meziani, S. Current Advancements on Autonomous Mission Planning and Management Systems: An AUV and UAV Perspective. Annu. Rev. Control 2018, 46, 196–215.
- Shimono, S.; Toyama, S.; Nishizawa, U. Development of Underwater Inspection System for Dam Inspection: Results of Field Tests. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–4.
- Shojaei, A.; Moud, H.I.; Flood, I. Proof of Concept for the Use of Small Unmanned Surface Vehicle in Built Environment Management. In Proceedings of the Construction Research Congress, New Orleans, LA, USA, 2–4 April 2018; pp. 116–126.
- Masago, H. Approaches towards Standardization of Performance Evaluation of Underwater Infrastructure Inspection Robots: Establishment of Standard Procedures and Training Programs. In Proceedings of the 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Tokoname, Japan, 4–6 March 2021; pp. 244–247.
- Cymbal, M.; Tao, H.; Tao, J. Underwater Inspection with Remotely Controlled Robot and Image Based 3D Structure Reconstruction Techniques. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016; pp. 1–10.
- Ma, Y.; Ye, R.; Zheng, R.; Geng, L.; Yang, Y. A Highly Mobile Ducted Underwater Robot for Subsea Infrastructure Inspection. In Proceedings of the 2016 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Chengdu, China, 19–22 June 2016; pp. 397–400.
- Shojaei, A.; Moud, H.I.; Flood, I. Proof of Concept for the Use of Small Unmanned Surface Vehicle in Built Environment Management. In Proceedings of the Construction Research Congress 2018: Construction Information Technology-Selected Papers from the Construction Research Congress 2018, New Orleans, LA, USA, 2–4 April 2018; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2018; pp. 116–126.
- Shojaei, A.; Izadi Moud, H.; Razkenari, M.; Flood, I.; Hakim, H. Feasibility Study of Small Unmanned Surface Vehicle Use in Built Environment Assessment. In Proceedings of the Institute of Industrial and Systems Engineers (IISE) Annual Conference, Orlando, FL, USA, 19 May 2018.
- Paap, K.L.; Christaller, T.; Kirchner, F. A Robot Snake to Inspect Broken Buildings. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No.00CH37113), Takamatsu, Japan, 31 October–5 November 2000; Volume 3, pp. 2079–2082.
- Lakshmanan, A.; Elara, M.; Ramalingam, B.; Le, A.; Veerajagadeshwar, P.; Tiwari, K.; Ilyas, M. Complete Coverage Path Planning Using Reinforcement Learning for Tetromino Based Cleaning and Maintenance Robot. Autom. Constr. 2020, 112, 103078.
- Lin, J.-L.; Hwang, K.-S.; Jiang, W.-C.; Chen, Y.-J. Gait Balance and Acceleration of a Biped Robot Based on Q-Learning. IEEE Access 2016, 4, 2439–2449.
- Afsari, K.; Halder, S.; King, R.; Thabet, W.; Serdakowski, J.; Devito, S.; Mahnaz, E.; Lopez, J. Identification of Indicators for Effectiveness Evaluation of Four-Legged Robots in Automated Construction Progress Monitoring. In Proceedings of the Construction Research Congress, Arlington, VA, USA, 9–12 March 2022; American Society of Civil Engineers: Arlington, TX, USA, 2022; pp. 610–620.
- Faigl, J.; Čížek, P. Adaptive Locomotion Control of Hexapod Walking Robot for Traversing Rough Terrains with Position Feedback Only. Robot. Auton. Syst. 2019, 116, 136–147.
- Afsari, K.; Halder, S.; Ensafi, M.; DeVito, S.; Serdakowski, J. Fundamentals and Prospects of Four-Legged Robot Application in Construction Progress Monitoring. In Proceedings of the ASC International Proceedings of the Annual Conference, Virtual, CA, USA, 5–8 April 2021; pp. 271–278.
- Halder, S.; Afsari, K.; Serdakowski, J.; DeVito, S. A Methodology for BIM-Enabled Automated Reality Capture in Construction Inspection with Quadruped Robots. In Proceedings of the International Symposium on Automation and Robotics in Construction, Bogotá, Colombia, 13–15 July 2021; pp. 17–24.
- Shin, J.-U.; Kim, D.; Jung, S.; Myung, H. Dynamics Analysis and Controller Design of a Quadrotor-Based Wall-Climbing Robot for Structural Health Monitoring. In Structural Health Monitoring 2015; Stanford University: Stanford, CA, USA, 2015.
- Shin, J.-U.; Kim, D.; Kim, J.-H.; Jeon, H.; Myung, H. Quadrotor-Based Wall-Climbing Robot for Structural Health Monitoring. Struct. Health Monit. 2013, 2, 1889–1894.
- Kriengkomol, P.; Kamiyama, K.; Kojima, M.; Horade, M.; Mae, Y.; Arai, T. Hammering Sound Analysis for Infrastructure Inspection by Leg Robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 887–892.
- Prieto, S.A.; Giakoumidis, N.; García de Soto, B. AutoCIS: An Automated Construction Inspection System for Quality Inspection of Buildings. In Proceedings of the 2021 38th ISARC, Dubai, United Arab Emirates, 2–4 November 2021.
- Kim, P.; Price, L.C.; Park, J.; Cho, Y.K. UAV-UGV Cooperative 3D Environmental Mapping. In Proceedings of the ASCE International Conference on Computing in Civil Engineering 2019, Atlanta, GA, USA, 17–19 June 2019; ASCE: Atlanta, GA, USA, 2019; pp. 384–392.
- Kim, P.; Park, J.; Cho, Y. As-Is Geometric Data Collection and 3D Visualization through the Collaboration between UAV and UGV. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction (ISARC), Banff, AB, Canada, 21–24 May 2019; Al-Hussein, M., Ed.; International Association for Automation and Robotics in Construction (IAARC): Banff, AB, Canada, 2019; pp. 544–551.
- Khaloo, A.; Lattanzi, D.; Jachimowicz, A.; Devaney, C. Utilizing UAV and 3D Computer Vision for Visual Inspection of a Large Gravity Dam. Front. Built Environ. 2018, 4, 31.
- Mansouri, S.S.; Kanellakis, C.; Fresk, E.; Kominiak, D.; Nikolakopoulos, G. Cooperative UAVs as a Tool for Aerial Inspection of the Aging Infrastructure. In Proceedings of the Field and Service Robotics; Hutter, M., Siegwart, R., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 177–189.
- Mansouri, S.S.; Kanellakis, C.; Fresk, E.; Kominiak, D.; Nikolakopoulos, G. Cooperative Coverage Path Planning for Visual Inspection. Control Eng. Pract. 2018, 74, 118–131.
- Ueda, T.; Hirai, H.; Fuchigami, K.; Yuki, R.; Jonghyun, A.; Yasukawa, S.; Nishida, Y.; Ishii, K.; Sonoda, T.; Higashi, K.; et al. Inspection System for Underwater Structure of Bridge Pier. Proc. Int. Conf. Artif. Life Robot. 2019, 24, 521–524.
- Yang, Y.; Hirose, S.; Debenest, P.; Guarnieri, M.; Izumi, N.; Suzumori, K. Development of a Stable Localized Visual Inspection System for Underwater Structures. Adv. Robot. 2016, 30, 1415–1429.


