Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Osama Mohamed ElSahly | -- | 3207 | 2022-11-21 09:09:31 | | | |
| 2 | Conner Chen | + 16 word(s) | 3223 | 2022-11-22 07:58:50 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Elsahly, O.; Abdelfatah, A. Traffic Incident Detection Algorithms. Encyclopedia. Available online: https://encyclopedia.pub/entry/35503 (accessed on 24 June 2026).
Elsahly O, Abdelfatah A. Traffic Incident Detection Algorithms. Encyclopedia. Available at: https://encyclopedia.pub/entry/35503. Accessed June 24, 2026.
Elsahly, Osama, Akmal Abdelfatah. "Traffic Incident Detection Algorithms" Encyclopedia, https://encyclopedia.pub/entry/35503 (accessed June 24, 2026).
Elsahly, O., & Abdelfatah, A. (2022, November 21). Traffic Incident Detection Algorithms. In Encyclopedia. https://encyclopedia.pub/entry/35503
Elsahly, Osama and Akmal Abdelfatah. "Traffic Incident Detection Algorithms." Encyclopedia. Web. 21 November, 2022.
Copy Citation
Traffic incidents have negative impacts on traffic flow and the gross domestic product of most countries. In addition, they may result in fatalities and injuries. Thus, efficient incident detection systems have a vital role in restoring normal traffic conditions on the roads and saving lives and properties. Researchers have realized the importance of Automatic Incident Detection (AID) systems and conducted several studies to develop AID systems to quickly detect traffic incidents with an acceptable performance level. AID can be categorized into four categories: comparative, statistical, artificial intelligence-based and video–image processing algorithms.
traffic incidents
automatic traffic incident detection
incident management
1. Comparative (Pattern Recognition) Algorithms
The comparative algorithms have predefined thresholds that represent normal traffic conditions. The collected traffic flow parameters (i.e., speed, occupancy and/or flow) are compared against these thresholds. If there are significant deviations from these thresholds, incident alarms are triggered [1][2]. This category includes the California algorithm [3], which is the first and the most known algorithm in this category, the Pattern Recognition (PATREG) algorithm [4], the All Purpose Incident Detection (APID) algorithm [5] and many other algorithms.
The California algorithm, also known as the Traffic Services Corporation (TSC) algorithm, is one of the pioneering algorithms and one of the most known comparative algorithms. It is based on the concept that the occurrence of traffic incidents significantly increases the occupancy in the upstream section of the road while decreasing the occupancy in the downstream section of the road. Thus, it uses the occupancy measured from two adjacent fixed detectors. Three tests are applied to the measured occupancies by the two detectors and if the values from the three tests surpass predefined thresholds, an alarm of incidents is set off [2][6].
Here, O1 is the difference between the occupancy of the upstream detector and the occupancy of the downstream detector; O2 is the relative difference between the occupancy of the upstream detector and the occupancy of the downstream detector; O3 is the temporal difference in downstream occupancy; T1, T2 and T3 are the test thresholds [7].
One of the major drawbacks and limitations of this algorithm is that it depends on the readings of the fixed detectors. Thus, the performance of this algorithm will be significantly affected by any breakdowns or defects in the detectors. In addition, the predefined thresholds are determined based on historical data of normal traffic and incident conditions, which may vary from one location to another. Additionally, the algorithm requires extensive calculations [8]. Moreover, in some situations, the traffic might exhibit incident-like patterns even though there is no incident such as the presence of ramps, grade changes or lane drops between detector stations [9]. These situations may cause false alarms and thus impact the performance of the algorithm. The algorithm has a good Detection Rate (DR) and acceptable False Alarm Rate (FAR) but these are achieved at a cost of delays in detecting the occurrence of incidents and a high Mean Time to Detect (MTTD) that can reach up to 4 min [9]. Payne and Tignor modified the original algorithm to overcome some of its limitations and improve its performance. Based on that, 10 algorithms were developed out of it such as California algorithm #7 and California algorithm #8, which were proved to have the best performance [3][10]. Guo et al. modified the original California algorithm to be able to detect traffic incidents in urban areas instead of freeways [11]. Since traffic flow in urban roads is discontinuous and varies with time unlike freeways, which have stable and continuous traffic flow, they suggested using dynamic thresholds, derived from iterative formulas, instead of constant predefined thresholds.
APID algorithm was developed as a component of the COMPASS software, which was designed to be implemented in the traffic management center in Toronto, Canada [5]. This algorithm integrates the elements of the California algorithm and expands it to consider different traffic conditions since it has incident detection algorithms for heavy, medium and low traffic conditions plus an incident termination detection routine, a routine to search for the presence of compression waves and persistence of incident condition testing routine [1][6].
Moreover, the McMaster algorithm was developed to overcome some of the limitations of the California algorithm [12][13]. Instead of using occupancy only as the input parameter, this algorithm considers the flow, occupancy, and speed from a single station as input parameters. The detection algorithm analyzes the changes in three parameters simultaneously. If a sudden and sharp change in one of the three variables is observed, while the change in the remaining variables is smooth and continuous, this can indicate the occurrence of an incident [13]. The algorithm utilizes historical data of normal and incident conditions to develop flow–occupancy–speed charts and sets boundaries between the normal and incident conditions. If the observed traffic parameters exceed the normal condition threshold for consecutive periods, an alarm is triggered to indicate the occurrence of an incident. Using the three parameters together instead of using the occupancy only leads to the main advantage of this algorithm, which is a high incident detection rate compared to the California algorithm. Therefore, this algorithm has higher DR and lower MTTD, compared to the California algorithm. In addition, this algorithm depends on the data obtained from a single station instead of two adjacent stations. Hence, the number of false alarms triggered by the normal variations that mimic incident-like patterns is reduced. However, the major flaw of this algorithm is that the weather conditions can impact its detection capability. The algorithm was assessed during a snowstorm and the FAR was increased significantly because during snowstorms, vehicles had to decrease their speeds sharply and drive more cautiously. This reduction was incorrectly detected as incidents thus the number of FAR was increased in this situation [12][13].
To alleviate the issue of the random fluctuations that may cause false alarms in the California algorithm, in 1993, Stephanedes and Chassiakos developed the Minnesota algorithm [14]. The algorithm collects the occupancy from two adjacent detector stations upstream and downstream over 30 s intervals. The algorithm calculates the average of the spatial occupancy difference between the two stations over six intervals (three minutes). This process is called short-term time averaging. Then, the algorithm inspects the discontinuity in the spatial occupancy difference over the past three minutes. If the spatial difference exceeds certain thresholds, this will trigger an incident alarm. The advantage of using short-term time averaging is to smooth up the random fluctuations in the data, filter the data, and remove the noise that triggers false alarms that affect the detection capability of the algorithm [15]. The performance of this algorithm was compared to the performance of the California, Standard Deviation, and Double Exponential algorithms (these will be discussed in the following subsection). This comparison showed that the Minnesota algorithm achieved the highest DR and produced the lowest FAR compared to the other three algorithms [14]. However, the main weakness of this algorithm is the detection time, which can be three minutes or more since it collects and evaluates the average spatial occupancy difference over three minutes. In addition, this algorithm depends only on occupancy as the input variable to detect the occurrence of an incident. This may cause undesirable incident alarms especially during low traffic flow. If the flow of the vehicles over the detector stations is low thus the occupancy will be low as well, which may be misclassified as an incident.
The Technical University of Munich developed an Automatic Incident Detection (AID) system using Bluetooth detectors instead of an inductive loop as part of a project called iRoute [16]. These detectors were used to measure the actual travel time of the vehicles and then the speed of the vehicles between two consecutive detector stations, with known distances, can be calculated. A considerable increase in travel time and decrease in speed can be used as a sign of the existence of an incident on the road. The advantage of this system is that it uses Bluetooth detectors instead of inductive loop detectors, which are less expensive, have low installation and maintenance costs, and also have high scanning and detection range compared to inductive loops. Thus, a low number of detectors can provide a wider coverage area. Additionally, their power consumption is very low and the collected data can be easily transferred via The Global System for Mobile Communications (GSM), which has low service costs. Nevertheless, the performance of this system is highly affected by the distance between the Bluetooth detectors since the DR decreases with the increase in the distance between the detectors as the incidents can be smoothed quickly before their impacts reach the downstream detectors [17].
2. Statistical Algorithms
These algorithms use statistical techniques to estimate traffic characteristics and compare them with the observed traffic data obtained from the road to determine if there is a statistical difference between them, which indicates potential incidents [1][6]. The contributions and the limitations of these algorithms are discussed in this subsection.
In 1974, the Texas Transportation Institute (TTI) developed the Standard Normal Deviate (SND) Algorithm and applied it on the Houston Gulf Freeway (I-45) [18]. This algorithm uses historical data on the traffic parameters and calculates the mean (x0) and the standard deviation (σ) of these variables and then compares them to the current values of the variables collected from the field to calculate the SND using Equation (4).
where xk is the current value and x0 is the mean and σ is the standard deviation.
The incident detection logic for this algorithm is that a significant deviation of the traffic variable from its mean is a sign of the occurrence of an incident [4]. Therefore, if the calculated SND exceeded a certain threshold, this will trigger an incident alarm [1][6]. This algorithm was tested and it achieved a high DR of about 92% and FAR of 1.3% and MTTD of around 1 min [1]. Nevertheless, the SND has two main shortcomings. First, calculating the mean and the standard deviation of the variables and determining the thresholds is tedious and time-consuming. Second, the presence of outliers in the data has a significant impact on the performance of the algorithm since they can inflate the mean and the standard deviation of the variables and hence reduce the DR. This phenomenon is called masking [19].
To overcome the masking problem in the SND algorithm, Pranamesh et al. established a new algorithm based on the Inter-Quartile Distance (IQD) to investigate irregularities in the observed traffic speed that can indicate the presence of an incident [20][21]. The difference between this algorithm and the SND algorithm is that it uses the median or the second quartile instead of the mean and the Inter-Quartile score Q instead of the standard deviation to calculate IQD. The Inter-Quartile score Q is the difference between the third quartile and the first quartile of the values divided by 1.35 [21]. The IQD is used to measure the deviation from the normal condition and if it is less than a certain threshold, this indicates the existence of an incident. Although this algorithm alleviates the masking phenomenon, it suffers from another phenomenon called swamping. This phenomenon occurs when most of the values (more than 50%) are close to each other hence the first and third quartiles will be almost equal, and therefore the IQD will be approximately zero. Consequently, any measured speed from the field that is different than the median value will be an outlier and incorrectly detected as an incident, thus the FAR will be high. However, the Federal Highway Administration (FHWA) recommended that if the average speed of the freeways is less than 45 mph, this is a sign of the occurrence of congestion. Therefore, by following FHWA guidelines, incident alarms should be triggered only if the average speed of the freeway falls below 45 mph [22]. This algorithm has achieved a DR of about 97% and a FAR of 4.8% [21].
Additionally, some researchers utilized some smoothing and filtering techniques to smooth the data, average out the random fluctuations, and refine the noises in the data thus reducing the FAR. Double Exponential Smoothing (DES) is one of the smoothing techniques used to remove the noise or the fluctuations of normal traffic data that masks the underlying trends and produces false alarms [1][23]. Cook et al. developed an incident detection algorithm using DES [24]. This algorithm uses recent and past observations of some of the traffic parameters such as volume, occupancy and speed to perform short-term prediction of traffic conditions and assumes that they represent normal traffic conditions. The algorithm weighs past and recent traffic observations differently by using a double exponential smoothing function, which assigns higher weights to the most recent observation. A tracking signal, which is the errors between the predicted and observed traffic parameters, is calculated to detect incidents.
3. Artificial Intelligence Algorithms
With the development of computational intelligence, Artificial Intelligence (AI) and Machine Learning (ML) are used extensively in the transportation sector [25][26][27]. They are used in managing and controlling traffic volume [28], predicting the traffic flow of autonomous vehicles [29], traffic management and planning [30][31] and detecting traffic incidents [32][33][34][35]. Artificial Intelligence algorithms apply AI and ML models to identify the normal and abnormal traffic patterns and then classify the given input data as either incident or normal conditions [36]. These algorithms include Artificial Neural Networks (ANNs), fuzzy logic, random forest, decision trees, support vector machine (SVM) and a combination of these models [1][6].
4. Video–Image Processing Algorithms
CCTV cameras are used for traffic management on roadways. The video–image processing algorithms use traffic videos captured from CCTV cameras installed on the roads to detect traffic incidents [1][37][38]. They break the recorded videos into a sequence of image frames and then extract the background roads and subtract moving vehicles from them. These frames are analyzed by video–image processing algorithms that track the moving vehicles to determine the spatial-temporal characteristics of the traffic variables and then analyze these to identify incident or incident-free states [39][40]. Figure 1 shows the steps of video–image processing incident detection algorithms.
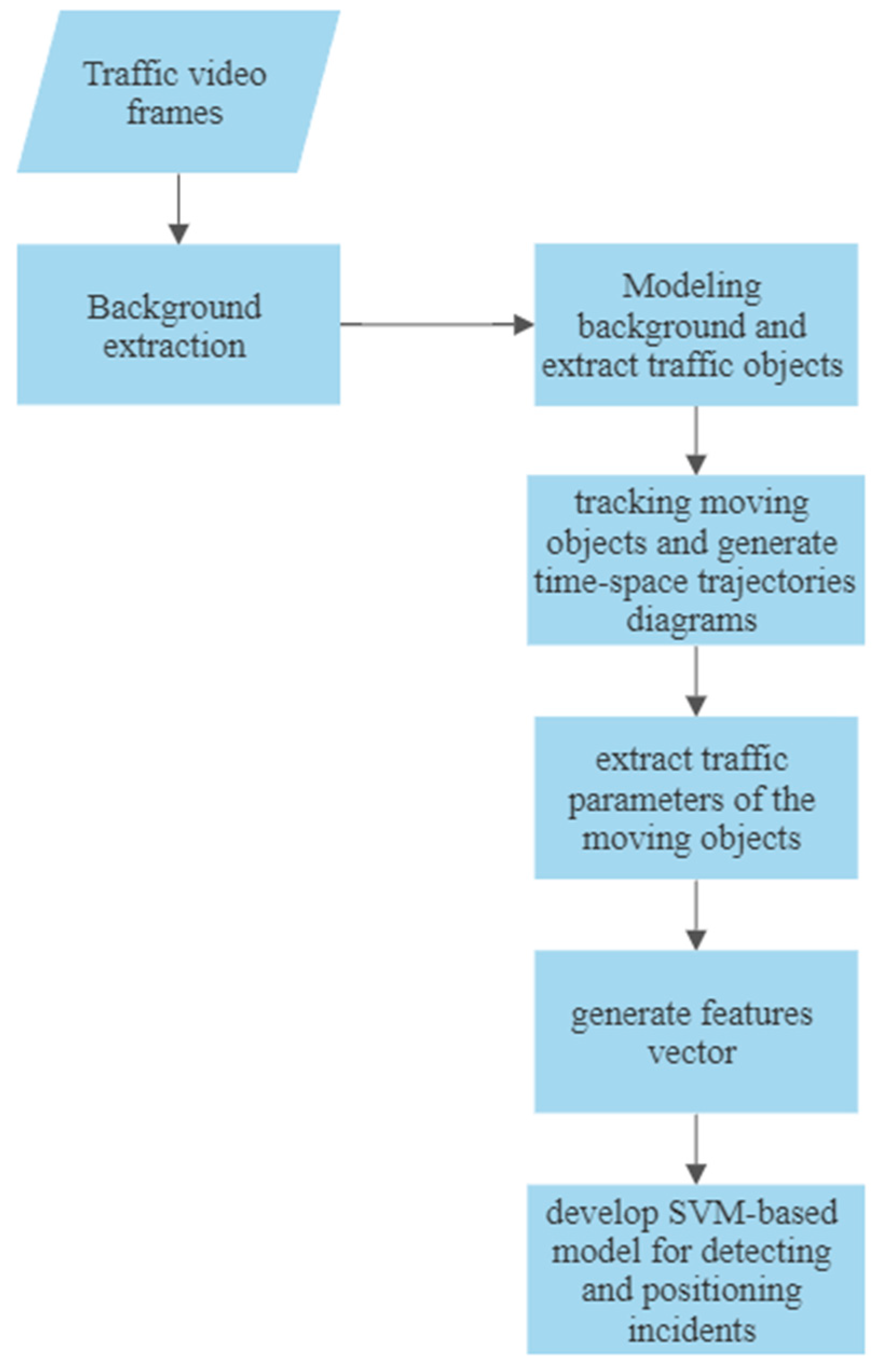
Figure 1. Flowchart of video–image incident detection [41].
The Autoscope Incident Detection Algorithm (AIDA) is one of the video–image processing-based incident detection algorithms that analyze spatial-temporal characteristics of the traffic variables. It looks for a sharp decrease in speed or a substantial increase in occupancy to detect traffic incidents [42][43].
The performance of these algorithms will degrade as the visibility decreases. Thus, severe weather conditions (rain, snow, fog, and/or lighting) and the cameras’ position can have a significant impact on the detection capability of these algorithms [6].
Table 1 summarizes the advantages and disadvantages of the aforementioned categories of incident detection systems.
Table 1. Advantages and disadvantages of incident detection algorithms.
| Category | Contributions and Advantages | Limitations and Drawbacks | |
|---|---|---|---|
| Comparative algorithms | California algorithms | Look for discrepancies in traffic parameters between adjacent loop detectors to identify the presence of an incident [2][3][6][7][8][9][10][11]. It has good DR and a tolerable FAR. |
It has a long MTTD that can reach about 4 min [9]. The performance of the algorithm is affected by any malfunction in any detector. Some factors can cause incident-like patterns and increase the number of false alarms. |
| McMaster algorithms | Overcome the weaknesses of the California algorithm series [12][13]. It uses the data from a single detector station instead of two adjacent stations and considers the relationship between speed, flow and occupancy. |
It is sensitive to severe weather conditions such as rain or snow, which may result in an increase in the number of false alarms. | |
| Minnesota algorithm | Investigates the discontinuity in the average spatial occupancy difference between the two stations over six intervals. The algorithm uses short-term time averages to smooth up the random fluctuations in the data, filter the data, and remove the noise that triggers false alarms, which affects the detection capability of the algorithm [14][15]. | The detection time can be three minutes or more. It depends on the occupancy only to detect incidents, which can cause false alarms during low traffic conditions. |
|
| Bluetooth based algorithms | Uses Bluetooth detectors instead of an inductive loop, which provides a reliable, cost-efficient and fast method for detecting traffic incidents or congestion [16][17]. | Some factors such as detectors spacing, operating conditions, duration and severity of the incident and the location of the incident relative to the detectors can impact the performance of the algorithm. | |
| GPS-based algorithms | Utilizes driver’s mobile phones or GPS trackers in the vehicles to establish spatio-temporal traces of the vehicles to detect traffic congestion and incidents [44][45]. | The range and the placement of the sensors can affect the efficiency of the sensors or may cause false alarms. | |
| FCD-based algorithms | Uses probe vehicles to collect real-time traffic data and detect the occurrence of incidents. Cost-effective method that can be used instead of fixed detectors [46][47][48][49][50][51]. |
Penetration rate of the tracked vehicles on the road and data latency affect the performance of the algorithm. | |
| V2V- and V2I-based algorithms | Use V2V and V2I communications to monitor traffic and detect incidents and congestion [52][53][54][55][56][57]. | Impacted by the availability of the communications protocols among different entities (vehicles and infrastructure). | |
| Statistical Algorithms | SND algorithm | Evaluates the deviation of a variable from the means to identify potential incidents [1][4][6][18][19]. | Sensitive to the presence of outliers, which can cause the masking phenomenon. |
| IQD-based algorithm | Overcomes the masking phenomenon in the SND algorithm by using the median or the second quartile instead of the mean and Inter-Quartile score Q instead of the standard deviation to calculate IQD [20][21][22]. | It is prone to swamping phenomenon, which can increase FAR. | |
| DES algorithm | Removes the noise and heterogeneity from the traffic data to clarify the true traffic patterns to help the system to detect incidents easily and reduce false alarms [23][24][58]. | It predicts the traffic variables under normal traffic conditions and assumes that the traffic will follow the predicted pattern over time. Additionally, it requires extensive computational efforts. | |
| Time Series Algorithms | Uses historical data of traffic variables to employ statistical short-term forecasting of normal traffic conditions. Significant deviations between the observed and predicted conditions indicate the existence of incidents [4][6][23][37][59][60][61][62]. | Time-consuming and require extensive computational efforts. Additionally, they assume the traffic follows a predictable pattern over time. | |
| Artificial Intelligence Algorithms | ANN algorithms | Uses machine learning to classify the provided traffic data as incident or non-incident situations [1][15][63][64][65][66][67][68][69][70][71][72]. | The accuracy of the algorithm depends on the performance of the model which needs optimization and tuning. There is no rule to determine the structure of the network, the appropriate structure is achieved through trial and error. |
| Fuzzy logic algorithms | Deal with the complex and stochastic nature of traffic variables. They provide the likelihood for an incident [44][73][74][75][76][77]. | The performance depends on the rules and membership functions that are set. They completely depend on human knowledge and expertise. It does not give a clear signal of incident or no incident. |
|
| Support Vector Machine | Provides a computationally efficient nonlinear classifier that can be used in real-time incident detection [32][78][79][80][81][82][83]. | The accuracy of the model is highly dependent on the kernel function used. Nevertheless, selecting the appropriate kernel function is complex. SVM is suitable for large datasets because this will make the training process very time-consuming. |
|
| Ensemble Learning Algorithms | Combine multiple machine learning models to build a powerful prediction model that has better predictive performance than any constituent machine learning model alone [19][32][84][85]. | The models should be selected carefully to improve the predictive performance of the model. The ensemble can be complex and less interpretable and can cost more time during creating and training. |
|
| Video–image Processing Algorithms | Analyze videos of real-time traffic captured by surveillance cameras to detect traffic congestions and incidents [1][6][37][38][39][40][41][42][43]. | The lighting conditions, extreme weather conditions and coverage range of the camera that is used to capture traffic video have a major impact on the algorithm’s performance [6]. | |
References
- Parkany, E.; Xie, C. A Complete Review of Incident Detection Algorithms & Their Deployment: What Works and What Doesn’t; Report No: NETCR37; The New England Transportation Consortium: Mansfield Center, CT, USA, 2005.
- Imani, H.N. The Use of Real-Time Connected Vehicles and HERE Data in Developing an Automated Freeway Incident Detection Algorithm. Master’s Thesis, University of North Florida, Jacksonville, FL, USA, 2019. Available online: https://digitalcommons.unf.edu/etd/929 (accessed on 12 April 2022).
- Payne, H.J.; Tignor, S. Freeway Incident-Detection Algorithms Based on Decision Trees With States. In Proceedings of the 57th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 16–20 January 1978.
- Collins, J.F.; Hopkins, C.M.; Martin, J.A. Automatic Incident Detection: TRRL Algorithms HIOCC and PATREG; Transport and Road Research Laboratory: Crowthorne, UK, 1979.
- Masters, P.H.; Lam, J.K.; Wong, K. Incident Detection Algorithms for COMPASS—An Advanced Traffic Management System. In Proceedings of the Vehicle Navigation and Information Systems Conference, Troy, MI, USA, 20–23 October 1991; Volume 2, pp. 295–310.
- Martin, P.T.; Perrin, J.; Hansen, B.; Kump, R.; Moore, D. Incident Detection Algorithm Evaluation; MPC-01-122; Utah Department of Transportation: Taylorsville, UT, USA, 2001.
- Liu, Q.; Chung, E.; Zhai, L. Fusing Moving Average Model and Stationary Wavelet Decomposition for Automatic Incident Detection: Case Study of Tokyo Expressway. J. Traffic Transp. Eng. 2014, 1, 404–414.
- Bakioğlu, G.; Silgu, M.A.; Özcanan, S.; Gökaşar, I.; Büyük, M.; Çelikoğlu, H.B.; Osman, A. Incident Detection Algorithms: A Literature Review. In Proceedings of the 1st IRF Europe & Central Asia Regional Congress & Exhibition, Istanbul, Turkey, 15–18 September 2015.
- Lyall, B. Performance Evaluation of the Mc Master Incident Detection Algorithm. Ph.D. Thesis, McMaster University, Hamilton, ON, Canada, 1991.
- Cohen, S.; Ketselidou, Z. A Calibration Process for Automatic Incident Detection Algorithms. In Microcomputers in Transportation; ASCE: Reston, VA, USA, 1993; pp. 506–515.
- Guo, W.; Wang, Z.; Wang, W.; Bubb, H. Traffic Incident Automatic Detection Algorithms by Using Loop Detector in Urban Roads. Recent Patents Comput. Sci. 2015, 8, 41–48.
- Athol, P. Interdependence of Certain Operational Characteristics within a Moving Traffic Stream. Highw. Res. Rec. 1965, 72, 58–87.
- Persaud, B.N.; Hall, F.L. Catastrophe Theory and Patterns in 30-Second Freeway Traffic Data—Implications for Incident Detection. Transp. Res. Part A Gen. 1989, 23, 103–113.
- Stephanedes, Y.J.; Chassiakos, A.P. Application of Filtering Techniques for Incident Detection. J. Transp. Eng. 1993, 119, 13–26.
- Cheu, R.L.; Ritchie, S.G. Automated Detection of Lane-Blocking Freeway Incidents Using Artificial Neural Networks. Transp. Res. Part C 1995, 3, 371–388.
- Margreiter, M.; Spangler, M.; Zeh, T.; Carstensen, C. Bluetooth-Measured Travel Times for Dynamic Re-Routing. In Proceedings of the Annual International Conference on ACE 2015 Singapore, Singapore, 13–14 April 2015.
- Karatsoli, M.; Margreiter, M.; Spangler, M. Bluetooth-Based Travel Times for Automatic Incident Detection—A Systematic Description of the Characteristics for Traffic Management Purposes. Transp. Res. Procedia 2017, 24, 204–211.
- Dudek, C.L.; Messer, C.J.; Nuckles, N.B. Incident Detection on Urban Freeways. Transp. Res. Rec. 1974, 495, 12–24.
- Ahuja, L. Automatic Incident Detection (AID). Master’s Thesis, Iowa State University, Ames, IA, USA, 2018.
- Chakraborty, P.; Hegde, C.; Sharma, A. Data-Driven Parallelizable Traffic Incident Detection Using Spatio-Temporally Denoised Robust Thresholds. Transp. Res. Part C Emerg. Technol. 2019, 105, 81–99.
- Chakraborty, P.; Sharma, A.; Knickerbocker, S.; Hess, J. Outlier Mining Based Traffic Incident Detection Using Big Data Analytics. In Proceedings of the 96th Annual Meeting Transportation Research Board, Washington, DC, USA, 8–12 January 2017.
- Federal Highway Administration. Traffic Congestion and Reliability: Trends and Advanced Strategies for Congestion Mitigation; FHWA-HOP-05-064; Federal Highway Administration: Washington, DC, USA, 2005.
- Ahmed, S.A.; Cook, A. Application of Time-Series Analysis Techniques to Freeway Incident DETECTION. Transp. Res. Rec. 1982, 841, 19–21.
- Cook, A.R.; Cleveland, D.E. The Detection of Freeway Capacity Reducing Incidents by Traffic Stream Measurements; HSRI Report No. TrS-1; The University of Michigan: Ann Arbor, MI, USA, 1970; Volume 138.
- Olugbade, S.; Ojo, S.; Imoize, A.L.; Isabona, J.; Alaba, M.O. A Review of Artificial Intelligence and Machine Learning for Incident Detectors in Road Transport Systems. Math. Comput. Appl. 2022, 27, 77.
- Yuan, T.; Rocha Neto, W.; Rothenberg, C.E.; Obraczka, K.; Barakat, C.; Turletti, T. Machine Learning for Next-generation Intelligent Transportation Systems: A Survey. Trans. Emerg. Telecommun. Technol. 2022, 33, 1–35.
- Šusteková, D.; Knutelská, M. How Is the Artificial Intelligence Used in Applications for Traffic Management. Mach. Technol. Mater. 2015, 9, 49–52.
- Olayode, O.I.; Tartibu, L.K.; Okwu, M.O. Application of Artificial Intelligence in Traffic Control System of Non-Autonomous Vehicles at Signalized Road Intersection. Procedia CIRP 2020, 91, 194–200.
- Rusyaidi, M.; Ibrahim, Z. A Review: An Evaluation of Current Artificial Intelligent Methods in Traffic Flow Prediction. IOP Conf. Ser. Mater. Sci. Eng. 2020, 917, 012063.
- Gamel, S.A.; Saleh, A.I.; Ali, H.A. Machine Learning-Based Traffic Management Techniques for Intelligent Transportation System: Review. Nile J. Commun. Comput. Sci. 2021, 1, 9–18.
- Nama, M.; Nath, A.; Bechra, N.; Bhatia, J.; Tanwar, S.; Chaturvedi, M.; Sadoun, B. Machine Learning-based Traffic Scheduling Techniques for Intelligent Transportation System: Opportunities and Challenges. Int. J. Commun. Syst. 2021, 34, e4814.
- Dogru, N.; Subasi, A. Traffic Accident Detection Using Random Forest Classifier. In Proceedings of the 2018 15th Learning and Technology Conference (L&T), Jeddah, Saudi Arabia, 25–26 February 2018; pp. 40–45.
- Sharma, S.; Harit, S.; Kaur, J. Traffic Accident Detection Using Machine Learning Algorithms. In Proceedings of Third International Conference on Sustainable Computing SUSCOM-2021; Springer: Jaipur, India, 2021; pp. 501–507.
- Mani, D.; Amrith, P.; Umamaheswari, E.; Ajay, D.M.; Anitha, R.U. Smart Detection of Vehicle Accidents Using Object Identification Sensors with Artificial Intelligent Systems. Int. J. Recent Technol. Eng. 2019, 7, 375–379.
- Huang, T.; Wang, S.; Sharma, A. Highway Crash Detection and Risk Estimation Using Deep Learning. Accid. Anal. Prev. 2020, 135, 105392.
- Jin, X.; Srinivasan, D.; Cheu, R.L. Classification of Freeway Traffic Patterns for Incident Detection Using Constructive Probabilistic Neural Networks. IEEE Trans. Neural Netw. 2001, 12, 1173–1187.
- Deniz, O.; Celikoglu, H.B. Overview to Some Existing Incident Detection Algorithms: A Comparative Evaluation. Procedia Soc. Behav. Sci. 2011, 2, 153–168.
- Mahmassani, H.S.; Haas, C.; Zhou, S.; Peterman, J. Evaluation of Incident Detection Methodologies; FHWA/TX-00/1795-1; University of Texas at Austin: Austin, TX, USA, 1999.
- Bao, L.; Wang, Q.; Qu, W.; Mo, X. Research on Highway Traffic Event Detection Method Based on Image Processing. IOP Conf. Ser. Earth Environ. Sci. 2021, 791, 012193.
- Mimbela, L.E.Y.; Klein, L.A. Summary Of Vehicle Detection And Surveillance Technologies Used in Intelligent Transportation Systems; Joint Program Office for Intelligent Transportation Systems; U.S. Department of Transportation: Washington, DC, USA, 2000.
- Ren, J.; Chen, Y.; Xin, L.; Shi, J.; Li, B.; Liu, Y. Detecting and Positioning of Traffic Incidents via Video-Based Analysis of Traffic States in a Road Segment. IET Intell. Transp. Syst. 2016, 10, 428–437.
- Michalopoulos, P.G. Vehicle Detection Video Through Image Processing: The Autoscope System. IEEE Trans. Veh. Technol. 1991, 40, 21–29.
- Michalopoulos, P.G.; Jacobson, R.D.; Anderson, C.A.; DeBruycker, T.B. Automatic Incident Detection through Video Image Processing. Traffic Eng. Control 1993, 34, 66–75.
- Nikolaev, A.B.; Sapego, Y.S.; Ivakhnenko, A.M.; Mel’nikova, T.E.; Stroganov, V.Y. Analysis of the Incident Detection Technologies and Algorithms in Intelligent Transport Systems. Int. J. Appl. Eng. Res. 2017, 12, 4765–4774.
- Sun, Z.; Bebis, G.; Miller, R. On-Road Vehicle Detection: A Review. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 694–711.
- Li, Y.; McDonald, M. Motorway Incident Detection Using Probe Vehicles. Proc. Inst. Civ. Eng. Transp. 2005, 158, 11–15.
- Asakura, Y.; Kusakabe, T.; Nguyen, L.X.; Ushiki, T. Incident Detection Methods Using Probe Vehicles with On-Board GPS Equipment. Transp. Res. Part C Emerg. Technol. 2017, 81, 330–341.
- Houbraken, M.; Logghe, S.; Schreuder, M.; Audenaert, P.; Colle, D.; Pickavet, M. Automated Incident Detection Using Real-Time Floating Car Data. J. Adv. Transp. 2017, 2017, 1–13.
- Liang, Z.; Chen, H.; Song, Z.; Zhou, Y.; Zhang, B. Traffic Congestion Incident Detection and Dissipation Algorithm for Urban Intersection Based on FCD. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 2578–2583.
- Han, X.; Grubenmann, T.; Cheng, R.; Wong, S.C.; Li, X.; Sun, W. Traffic Incident Detection: A Trajectory-Based Approach. In Proceedings of the 2020 IEEE 36th International Conference on Data Engineering (ICDE), Dallas, TX, USA, 20–24 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1866–1869.
- Asakura, Y.; Kusakabe, T.; Long, N.X.; Ushiki, T. Incident Detection Methods Using Probe Vehicles with On-Board GPS Equipment. Transp. Res. Procedia 2015, 6, 17–27.
- Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.; Calafate, C.T.; Manzoni, P. Automatic Accident Detection: Assistance Through Communication Technologies and Vehicles. IEEE Veh. Technol. Mag. 2012, 7, 90–100.
- Fernandes, B.; Gomes, V.; Ferreira, J.; Oliveira, A. Mobile Application for Automatic Accident Detection and Multimodal Alert. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–5.
- Bossom, R.; Brignolo, R.; Ernst, T.; Evensen, K.; Frötscher, A.; Höfs, W.; Jeftic, Z.; Jääskeläinen, J.; Kompfner, P.; Kosch, T.; et al. D31 European ITS Communication Architecture-Overall Framework–Proof of Concept Implementation; FP6-027377; BMW Group Research and Technology: München, Germany, 2009.
- Cesana, M.; Fratta, L.; Gerla, M.; Giordano, E.; Pau, G. C-VeT the UCLA Campus Vehicular Testbed: Integration of VANET and Mesh Networks. In Proceedings of the 2010 European Wireless Conference (EW), Lucca, Italy, 12–15 April 2010; pp. 689–695.
- Welcome to OnStar. Available online: https://www.onstar.com/us/en/home/ (accessed on 15 April 2021).
- Grzeszczyk, R.; Merkisz, J.; Bogus, P.; Kaminski, T. Methods and Procedures for Testing the E-Call in-Vehicle Unit for the Purpose of Its Performance Assessment and Certification. In Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles (ESV), Stuttgart, Germany, 15–18 June 2009.
- Haule, H.J.; Sando, T.; Lentz, R.; Chuan, C.H.; Alluri, P. Evaluating the Impact and Clearance Duration of Freeway Incidents. Int. J. Transp. Sci. Technol. 2019, 8, 13–24.
- Ahmed, S.A.; Cook, A.R. Time Series Models for Freeway Incident Detection. Transp. Eng. J. ASCE 1980, 106, 731–745.
- Ahmed, M.S.; Cook, A.R. Analysis of Freeway Traffic Time-Series Data by Using Box-Jenkins Techniques. Transp. Res. Rec. 1997, 722, 1–9.
- Li, H.; Li, S.; Zhu, H.; Zhao, X.; Zhang, X. Automated Detection Algorithm for Traffic Incident in Urban Expressway Based on Lengthways Time Series. In Green Intelligent Transportation Systems; Springer: Singapore, 2019; Volume 503, pp. 625–633.
- Niu, S.-F.; Jiang, G.-Y.; Li, H.-W.; Jiang, H. Automated Detection Algorithm for Traffic Incident in Urban Expressway Based on Lengthways Time Series of Traffic Parameters. Ha’erbin Gong Ye Da Xue Xue Bao 2011, 43, 144–148.
- Ki, Y.-K.; Kim, J.-H.; Kim, T.-K.; Heo, N.-W.; Choi, J.-W.; Jeong, J.-H. Method for Automatic Detection of Traffic Incidents Using Neural Networks and Traffic Data. In Proceedings of the 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 1–3 November 2018; pp. 184–188.
- Cheu, R.L.; Ritchie, S.G.; Recker, W.W.; Bavarian, B. Investigation of a Neural Network Model for Freeway Incident Detection; National Academies Press: Washington, DC, USA, 1991.
- Dia, H.; Rose, G. Development and Evaluation of Neural Network Freeway Incident Detection Models Using Field Data. Transp. Res. Part C Emerg. Technol. 1997, 5, 313–331.
- Abdulhai, B.; Ritchie, S.G. Enhancing the Universality and Transferability of Freeway Incident Detection Using a Bayesian-Based Neural Network. Transp. Res. Part C Emerg. Technol. 1999, 7, 261–280.
- Zyryanov, V.V. Incidents Detection on City Roads. IOP Conf. Ser. Mater. Sci. Eng. 2020, 913, 42065.
- Gupta, G.; Singh, R.; Singh Patel, A.; Ojha, M. Accident Detection Using Time-Distributed Model in Videos. In Proceedings of the Fifth International Congress on Information and Communication Technology, London, UK, 20–21 February 2020; Yang, X.-S., Sherratt, S., Dey, N., Joshi, A., Eds.; Springer: Singapore, 2021; pp. 214–223.
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780.
- Jin, X.; Cheu, R.L.; Srinivasan, D. Development and Adaptation of Constructive Probabilistic Neural Network in Freeway Incident Detection. Transp. Res. Part C Emerg. Technol. 2002, 10, 121–147.
- Lin, Y.; Li, L.; Jing, H.; Ran, B.; Sun, D. Automated Traffic Incident Detection with a Smaller Dataset Based on Generative Adversarial Networks. Accid. Anal. Prev. 2020, 144, 105628.
- Li, L.; Lin, Y.; Du, B.; Yang, F.; Ran, B. Real-Time Traffic Incident Detection Based on a Hybrid Deep Learning Model. Transp. A 2022, 18, 78–98.
- Nguyen, D.-B.; Dow, C.-R.; Hwang, S.-F. An Efficient Traffic Congestion Monitoring System on Internet of Vehicles. Wirel. Commun. Mob. Comput. 2018, 2018, 1–17.
- Mustafa, F.W.F. An Application of Fuzzy Logic in Urban Traffic Incident Detection. Master’s Thesis, United Arab Emirates University, Al Ain, United Arab Emirates, 2015.
- Rossi, R.; Gastaldi, M.; Gecchele, G.; Barbaro, V. Fuzzy Logic-Based Incident Detection System Using Loop Detectors Data. Transp. Res. Procedia 2015, 10, 266–275.
- Ahmed, F.; Hawas, Y.E. A Fuzzy Logic Model for Real-Time Incident Detection in Urban Road Network. In Proceedings of the 5th International Conference on Agents and Artificial Intelligence, Barcelona, Spain, 15–18 February 2013; Volume 2, pp. 465–472.
- Lee, S.; Krammes, R.A.; Yen, J. Fuzzy-Logic-Based Incident Detection for Signalized Diamond Interchanges. Transp. Res. Part C Emerg. Technol. 1998, 6, 359–377.
- Motamed, M. Developing a Real-Time Freeway Incident Detection Model Using Machine Learning Techniques. Ph.D. Thesis, University of Texas at Austin, Austin, TX, USA, 2016.
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297.
- Jeyakumar, V.; Li, G.; Suthaharan, S. Support Vector Machine Classifiers with Uncertain Knowledge Sets via Robust Optimization. Optimization 2014, 63, 1099–1116.
- Bharath Kumar, M.; Basit, A.; Kiruba, M.B.; Giridharan, R.; Keerthana, S.M. Road Accident Detection Using Machine Learning. In Proceedings of the 2021 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 30–31 July 2021; pp. 2–6.
- Hsu, C.-W.; Chang, C.-C.; Lin, C.-J. A Practical Guide to Support Vector Classification; University of National Taiwan: Taipei, Taiwan, 2003.
- Yuan, F.; Cheu, R.L. Incident Detection Using Support Vector Machines. Transp. Res. Part C Emerg. Technol. 2003, 11, 309–328.
- Li, R.; Pereira, F.C.; Ben-Akiva, M.E. Overview of Traffic Incident Duration Analysis and Prediction. Eur. Transp. Res. Rev. 2018, 10, 22.
- Iqbal, Z.; Khan, M.I.; Hussain, S.; Habib, A. An Efficient Traffic Incident Detection and Classification Framework by Leveraging the Efficacy of Model Stacking. Complexity 2021, 2021, 1–17.
More
Information
Subjects:
Transportation
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.4K
Revisions:
2 times
(View History)
Update Date:
22 Nov 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No