 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | LI Shaobo | + 2346 word(s) | 2346 | 2020-12-25 06:54:37 | | | |
| 2 | Vivi Li | Meta information modification | 2346 | 2020-12-30 10:25:50 | | | | |
| 3 | Catherine Yang | Meta information modification | 2346 | 2021-09-28 08:12:27 | | |
Video Upload Options
The detection of product defects is essential in quality control in manufacturing. This study surveys stateoftheart deep-learning methods in defect detection. First, we classify the defects of products, such as electronic components, pipes, welded parts, and textile materials, into categories. Second, recent mainstream techniques and deep-learning methods for defects are reviewed with their characteristics, strengths, and shortcomings described. Third, we summarize and analyze the application of ultrasonic testing, filtering, deep learning, machine vision, and other technologies used for defect detection, by focusing on three aspects, namely method and experimental results. To further understand the difficulties in the field of defect detection, we investigate the functions and characteristics of existing equipment used for defect detection. The core ideas and codes of studies related to high precision, high positioning, rapid detection, small object, complex background, occluded object detection and object association, are summarized. Lastly, we outline the current achievements and limitations of the existing methods, along with the current research challenges, to assist the research community on defect detection in setting a further agenda for future studies.
1. Introduction
In the manufacture of mechanical products in complex industrial processes, defects such as internal holes [1], pits [2], abrasions [3], and scratches [4] arise, due to failure in design and machine production equipment as well as unfavorable working conditions. Products may also easily corrode [5] and be prone to fatigue [6] because of daily application. These defects increase the costs incurred by enterprises, shorten the service life of manufactured products, and result in an extensive waste of resources, thereby causing substantial harm to people and their safety [7]. Hence, detecting defects is a core competency that enterprises should possess in order to improve the quality of the manufactured products without affecting production. Automatic defect-detection technology has obvious advantages over manual detection. It not only adapts to an unsuitable environment but also works in the long run with high precision and efficiency. Research on defect-detection technology can reduce the production cost, improve production efficiency and product quality, as well as lay a solid foundation for the intelligent transformation of the manufacturing industry.
Therefore, many scholars have reviewed defect-detection-related technologies and applications to provide references for the application and research of defect-detection technology. For example, in view of the defect-detection technology applied by pharmaceutical products, Lalit Mohan Kandpal et al. [8]. summarized the application of hyperspectral [9], vibration spectrum [10], infrared [11], and other spectral technologies. For surface defect detection of manufactured products, Xianghua Xie [12] systematically recent advances in surface detection using computer vision and image processing techniques. By comparing the findings of past studies, they find that surface defect detection based on image processing requires high real-time performance in industrial applications. For fabric defect detection, scholars [13][14] reviewed the application and development of defect-detection methods commonly used in the production of textile fabrics from the perspective of defect-detection development of the textile industry production. Thermal imaging technologies are widely used in many industrial areas. I. Jorge Aldave [15] focused on the comparison of results obtained with commercially available non-experimental IR methods to provide references for the cameras in the field of non-destructive defect detection. Defect-detection technology is a hot topic in the industry and academia. However, scholars have yet to categorize product defect types (for example, steel [16] and textile [17]), the main detection techniques, summary of applications of defect-detection technology, existing equipment for defect detection, and other prospects. In addition, the mainline, review, and summary of the research status of relevant technologies locally and abroad have yet to be realized.
This paper first classifies the common defects of electronic components, pipes, welding parts, and textile materials, as shown in Figure 1. Then, it summarizes the mainstream deep-learning technology for defect detection and its application status and analyzes the application situation of the main defect-detection equipment, in order to provide reference for defect-detection technology in theory and practical application.
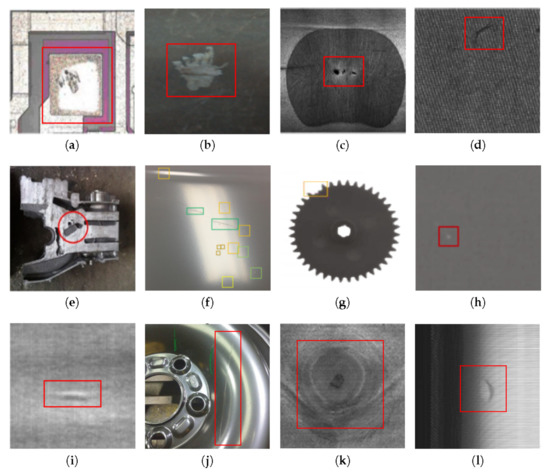
Figure 1. Defects in different areas: (a) metallization peeloff of electronic components [18]. (b) pipeline corrosion [19]. (c) defective with gas pore [20]. (d) defect bigknot of textile materials [21]. (e) shrinkage and porosity defect of Casting [22]. (f) defects in green, yellow, orange bounding box are scratch, cratering, hump, respectively in carbody [23]. (g) Lack defect of gear [23]. (h) light leakage defect on mobile screen [24]. (i) Convexity defect in aluminum foil [25]. (j) Scratch defect of the wheel hub [26]. (k) Branch defect of wood veneer [27]. (l) Bubble defect of tire sidewall [28].
2. Survey of Defect-Detection Technologies
Product defect-detection technology is mainly to detect the surface and internal defects of products. The defect-detection technology refers to the detection technology of spot, pit, scratch, color differences and defect on the product surface. Internal defect-detection technology mainly includes internal flaw detection, hole detection and crack detection [29]. At present, several methods are used to detect product quality, including deep learning [30], magnetic powder [31], eddy current testing [32], ultrasonic testing [33], and machine vision [34] detection methods.
Wet magnetic particle detection mixes the magnetic powder in water, oil, or other liquid media. Magnetic powder marks the location of defects through liquid pressure and the attraction of the external magnetic field [31][35][36]. The moisture detection method has high sensitivity, and the liquid medium is recyclable [37][38]. Dry Magnetic powder testing [39] directly attaches magnetic powder onto the surface of the magnetized workpiece for defect detection. This method is used for the local inspection of defects in large casting, welding parts, and other segments that are unsuitable for wet detection. The continuous magnetic particle detection method detects defects in magnetic suspension or powder under the external magnetic field [40]. The method can be used to observe the defects in the external magnetic field. Several factors that influence the precision of Magnetic powder testing include roughness and the profile of the test piece, the geometrical characteristics of defects, the selected magnetization method, and the quality of operators [41]. Meanwhile, the factors that influence the sensitivity of Osmosis testing are imaging reagent, the performance of osmotic fluid, quality of operators, and the influence of defects. Factors that influence the accuracy of the detection of eddy current are the type and parameters of coil and material and the profile of the test piece [42][43].
The ultrasonic testing effect is affected by the angle between the defect surface and the ultrasonic propagation direction [33][44]. If the angle is vertical, then the signal returned is strong, and the defect is easily detected. If the angle is horizontal, then the signal returned is weak, which makes detecting a leak easy. Therefore, selecting the appropriate detection sensitivity and corresponding probe to reduce leakage detection is necessary [45]. The factors that influence ultrasonic testing include projection direction, probe effectiveness, sound contact quality, and instrument operating frequency [46][47].
Machine vision detection mainly consists of image acquisition and defect detection and classification. Because of its fast, accurate, non-destructive and low-cost characteristics, machine vision is widely used. Machine vision identifies objects mainly based on the color, texture and geometric features of objects. The quality of image acquisition determines the difficulty of image processing. In turn, the quality of the image processing algorithm directly affects the accuracy and error detection rate of defect detection and classification [48][49][50]. The deep-learning method is also a defect-detection method that is based on image processing, which is widely used to obtain useful features in massive data [51].
Clearly, the traditional defect-detection techniques and the popular deep-learning defect-detection techniques have their advantages. The traditional detection methods are highly focused. For instance, Osmosis testing technology [52] is only suitable for detecting defects in highly permeable and non-porous materials and have certain advantages over other general methods. However, most of the traditional detection methods still need to rely on manual assistance to complete, especially when a certain amount of instrument debugging is required before testing, and the equipment development cost is high, which is not highly adaptable and limited by the equipment life and manufacturing accuracy. Innovative defect-detection techniques, particularly machine vision and deep-learning methods [53][54][55], have become the most popular in recent years and are one of the key technologies for automating defect detection due to their versatility and lack of reliance on human assistance. Compared to traditional defect detection methods, the new technologies offer better inspection results and lower costs, but still rely on large amounts of learned data to drive model updates and improve inspection accuracy.
3. Survey of Deep-Learning Defect-Detection Technologies
Deep-learning technology has developed rapidly and made great success in object detection [56], intelligent robot [57], saliency detection [58], parking garage sound event detection [59], sound event detection for smart city safety [60][61], UAV blade fault diagnosis [62][63][64] and other fields [65][66][67]. Deep learning has a kind of deep neural network structure with multiple convolutions layer. By combining low-level features to form a more abstract high-level representation of attribute categories or features, the data can be better reached in abstract ways such as edge and shape to improve the effectiveness of the deep-learning algorithm [65], Therefore, many researchers try to use deep-learning technology to defect detection of product and improved the product quality [66][67][68][69]. Table 1 summarizes the advantages and disadvantages of deep-learning methods commonly used in product defect detection. It mainly includes convolutional neural network (CNN) [70], autoencoder neural network [69][71], deep residual neural network [72], full convolution neural network [73], and recurrent neural network [74][75].
Table 1. Deep-Learning Defect-Detection Methods.
| Methods | Strengths | Weaknesses | Applicable |
|---|---|---|---|
| CNN | It has a strong learning ability for high-dimensional input data and can learn abstract, essential and high-order features from a small amount of preprocessed and even the most original data. | The good expression ability and the calculation complex will increase with the increase of network depth. | Unlimited material |
| Autoencoder neural network | It has a good object information representation ability, can extract the foreground region in the complex background, and has good robustness to the environment noise. | The input and output data dimensions of the autoencoder machine must be consistent. | Unlimited material |
| Depth residual neural network | The residual network has lower convergence loss and does not overfit, so it has better classification performance. | The network must cooperate with deeper depth to give full play to its structural advantages. | Unlimited material |
| Full convolution neural network | It can extract the feature of any size image, and obtain the high-level semantic prior knowledge matrix, which has a good effect on semantic level object detection. | The feature matrix transformation combined with the underlying features is needed, and the convergence speed of the model is slow. | Unlimited material |
| Recurrent neural network | When there are fewer sample data, we can learn the essential features of the data and reduce the loss of data information in the process of pooling. | With the increase of the number of iterations in the network training process, the recurrent neural network model may appear overfitting phenomenon. | Unlimited material |
(1) Using the CNN to defect detection of product [70]. CNN is a feedforward neural network. CNN consist of one or more convolutional layers and fully connected layers, as well as associated weights and pooling layers [76]. Literature [77] is a very popular LeNet convolution neural network structure. LeNet network structure can be used to detect defects in two situations: one is to design a complex multi-layer CNN structure, use different network structure to extra image content features, and complete end-to-end training to detect defects in images [55][78]; the other is to combine CNN with CRF model, train CNN with CRF energy function as constraint or optimize network prediction results with CRF. And to achieve the detection of product defects [66].
(2) The product defect-detection technology based on the neural network [69][71]. Autoencoder network mainly includes two stages: coding and decoding. In the coding stage, the input signal is converted into a coding signal for feature extraction; in the decoding stage, the feature information is converted into a reconstruction signal, and then the reconstruction error is minimized by adjusting the weight and bias to realize the defect detection [79]. The difference between autoencoder networks and other machine learning algorithms is that the learning goal of the autoencoder network is not for classification, but for feature learning [80][81]. It also has a strong ability of autonomous learning and highly nonlinear mapping. It can learn nonlinear metric functions to solve the problem of segmentation of complex background and foreground regions [82].
(3) The product defect-detection technology of deep residual neural network [72]. The deep residual network adds a residual module on the basis of the convolutional neural network. The residual network is characterized by easy optimization and can improve the accuracy by increasing the network depth [83][84]. CNN, Generative Adversarial Networks [85], etc. with the depth of the network increases, the extraction feature increases, but it is easy to cause the activation function not to converge. The purpose of the deep residual network is to optimize the increasing number of network layers with residual while increasing the network structure, so that the output and input element dimensions of the convolution layer in the residual unit are the same, and then through the activation function to reduce the loss.
(4) Full convolution neural network [73]. The fully connected layer is a connection between any two nodes between two adjacent layers. A fully connected neural network uses a fully connected operation, so there will be more weight values, which also means that the network will take up more memory and calculations [86]. During the calculation of the fully connected neural network, the feature map generated by the convolution layer is mapped into a fixed-length feature vector. The full convolution neural network can accept the input image of any size, and use the deconvolution layer to sample the feature map of the last convolution layer, it can recover to the same size of the input image.so that a prediction can be generated for each pixel, while retaining the spatial information in the original input image, and finally classify the feature map of the upper sampling pixel by pixel.
(5) Recurrent neural network recursively from the evolution direction of sequence data and all cyclic units are connected in a chain manner, and the input is sequence data [74][75]. The CNN model mainly extracts the feature information of input layer test samples through convolution and pooling operations. The recurrent neural network uses the recurrent convolution operation to replace the convolution operation on CNN. The difference is that the recurrent neural network does not perform the pooling layer operation to extract the features after the recurrent operation to extract the input layer features, but uses the recurrent convolution operation to process the features of the samples.
References
- Peng, Y.; Liu, G.; Quan, Y.; Zeng, Q. The depth measurement of internal defect based on laser speckle shearing interference. Opt. Laser Technol. 2017, 92, 69–73.
- Xiao, X.; Yu, L.; Dong, Z.; Mbelek, R.; Xu, K.; Lei, C.; Zhong, W.; Lu, F.; Xing, M. Adipose stem cell-laden injectable thermosensitive hydrogel reconstructing depressed defects in rats: Filler and scaffold. J. Mater. Chem. B 2015, 27, 5635–5644.
- Hui, K.; Jian, Y.; Chen, Z. Accurate and Efficient Inspection of Speckle and Scratch Defects on Surfaces of Planar Products. IEEE Trans. Ind. Inform. 2017, 4, 1855–1865.
- Chen, J.; Li, C. Prediction and Control of Thermal Scratch Defect on Surface of Strip in Tandem Cold Rolling. J. Iron Steel Res. Int. 2015, 22, 106–114.
- Rodionova, I.G.; Zaitsev, A.I.; Baklanova, O.N.; Kazankov, A.Y.; Naumenko, V.V.; Semernin, G.V. Effect of carbon steel structural inhomogeneity on corrosion resistance in chlorine-containing media. Metallurgist 2016, 59, 774–783.
- Amaya, J.; Lelah, A.; Zwolinski, P. Design for intensified use in product–service systems using life-cycle analysis. J. Eng. Des. 2014, 25, 280–302.
- Wang, T.; Chen, Y.; Qiao, M.; Snoussi, H. A fast and robust convolutional neural network-based defect detection model in product quality control. Int. J. Adv. Manuf. Technol. 2018, 94, 3465–3471.
- Kandpal, L.M.; Park, E.; Tewari, J.; Cho, B. Spectroscopic Techniques for Nondestructive Quality Inspection of Pharmaceutical Products. J. Biosyst. Eng. 2015, 40, 394–408.
- Li, B.; Cobo-Medina, M.; Lecourt, J.; Harrison, N.; Harrison, R.J.; Cross, J.V. Application of hyperspectral imaging for nondestructive measurement of plum quality attributes. Postharvest Biol. Technol. 2018, 141, 8–15.
- Amar, M.; Gondal, I.; Wilson, C. Vibration spectrum imaging: A novel bearing fault classification approach. IEEE Trans. Ind. Electron. 2014, 62, 494–502.
- Li, P.; Dolado, I.; Alfaro-Mozaz, F.J.; Casanova, F.; Hueso, L.E.; Liu, S.; Edgar, J.H.; Nikitin, A.Y.; Vélez, S.; Hillenbrand, R. Infrared hyperbolic meta surface based on nanostructured van der Waals materials. Science 2018, 359, 892–896.
- Xie, X. A review of recent advances in surface defect detection using texture analysis techniques. ELCVIA Electron. Lett. Comput. Vis. Image Anal. 2008, 7, 1–22.
- Ngan, H.Y.; Pang, G.K.; Yung, N.H. Automated fabric defect detection—A review. Image Vis. Comput. 2011, 29, 442–458.
- Mahajan, P.M.; Kolhe, S.R.; Patil, P.M. A review of automatic fabric defect detection techniques. Adv. Comput. Res. 2009, 1, 18–29.
- Aldave, I.J.; Bosom, P.V.; González, L.V.; De Santiago, I.L.; Vollheim, B.; Krausz, L.; Georges, M. Review of thermal imaging systems in composite defect detection. Infrared. Phys. Technol. 2013, 61, 167–175.
- Pernkopf, F. Detection of surface defects on raw steel blocks using Bayesian network classifiers. Pattern Anal. Appl. 2004, 7, 333–342.
- Zhang, W.; Ye, C.; Zheng, K.; Zhong, J.; Tang, Y.; Fan, Y.; Buehler, M.J.; Ling, S.; Kaplan, D.L. Tensan silk-inspired hierarchical fibers for smart textile applications. ACS Nano 2018, 12, 6968–6977.
- Shankar, N.G.; Zhong, Z.W. Defect detection on semiconductor wafer surfaces. Microelectron. Eng. 2005, 77, 337–346.
- Mao, B.; Lu, Y.; Wu, P.; Mao, B.; Li, P. Signal processing and defect analysis of pipeline inspection applying magnetic flux leakage methods. Intell. Serv. Robot. 2014, 7, 203–209.
- Liu, J.; Xu, G.; Ren, L.; Qian, Z.; Ren, L. Defect intelligent identification in resistance spot welding ultrasonic detection based on wavelet packet and neural network. Int. J. Adv. Manuf. Technol. 2017, 90, 2581–2588.
- Kumar, A.; Pang, G.K. Defect detection in textured materials using Gabor filters. IEEE Trans. Ind. Appl. 2002, 38, 425–440.
- Lin, J.; Yao, Y.; Ma, L.; Wang, Y. Detection of a casting defect tracked by deep convolution neural network. Int. J. Adv. Manuf. Technol. 2018, 97, 573–581.
- Yu, L.; Wang, Z.; Duan, Z. Detecting Gear Surface Defects Using Background-Weakening Method and Convolutional Neural Network. J. Sens. 2019, 2019, 125905.
- Li, C.; Zhang, X.; Huang, Y.; Tang, C.; Fatikow, S. A novel algorithm for defect extraction and classification of mobile phone screen based on machine vision. Comput. Ind. Eng. 2020, 146, 106530.
- Zhai, M.; Fu, S.; Gu, S.; Xie, Z.; Luo, X. Defect detection in aluminum foil by measurement-residual-based chi-square detector. Int. J. Adv. Manuf. Technol. 2011, 53, 661–667.
- Sun, X.; Gu, J.; Huang, R.; Zou, R.; Giron Palomares, B. Surface Defects Recognition of Wheel Hub Based on Improved Faster R-CNN. Electronics 2019, 8, 481.
- Urbonas, A.; Raudonis, V.; Maskeliūnas, R.; Damaševičius, R. Automated Identification of Wood Veneer Surface Defects Using Faster Region-Based Convolutional Neural Network with Data Augmentation and Transfer Learning. Appl. Sci. 2019, 9, 4898.
- Wang, R.; Guo, Q.; Lu, S.; Zhang, C. Tire Defect Detection Using Fully Convolutional Network. IEEE Access 2019, 7, 43502–43510.
- Moulin, E.; Chehami, L.; Assaad, J.; De Rosny, J.; Prada, C.; Chatelet, E.; Lacerra, G.; Gryllias, K.; Massi, F. Passive defect detection in plate from nonlinear conversion of low-frequency vibrational noise. Microelectron. Eng. 2005, 77, 337–346.
- Li, Y.; Zhao, W.; Pan, J. Deformable patterned fabric defect detection with fisher criterion-based deep learning. IEEE Trans. Autom. Sci. Eng. 2016, 14, 1256–1264.
- Elrefai, A.L.; Sasada, I. Magnetic particle detection system using fluxgate gradiometer on a permalloy shielding disk. IEEE Magn. Lett. 2016, 7, 1–4.
- Angelo, G.D.; Laracca, M.; Rampone, S.; Betta, G. Fast eddy current testing defect classification using lissajous figures. IEEE Trans. Instrum. Meas. 2018, 67, 821–830.
- Kusano, M.; Hatano, H.; Watanabe, M.; Takekawa, S.; Yamawaki, H.; Oguchi, K.; Enoki, M. Mid-infrared pulsed laser ultrasonic testing for carbon fiber reinforced plastics. Ultrasonics 2018, 84, 310–318.
- Yang, J.; Li, S.; Gao, Z.; Wang, Z.; Liu, W. Real-Time Recognition Method for 0.8 cm Darning Needles and KR22 Bearings Based on Convolution Neural Networks and Data Increase. Appl. Sci. 2018, 8, 1857.
- Chen, Y.; Kolhatkar, A.; Zenasni, O.; Xu, S.; Lee, T. Biosensing Using Magnetic Particle Detection Techniques. Sensors 2017, 17, 2300.
- Li, J.; Wang, G.; Xu, Z. Environmentally-friendly oxygen-free roastingwet magnetic separation technology for in situ recycling cobalt, Lithium Carbonate Graph. Spent LiCoO2/graphite Lithium Batteries. J. Hazard. Mater. 2016, 302, 97–104.
- Rymarczyk, T.; Szumowski, K.; Adamkiewicz, P.P.T.; Jan, S. Moisture Wall Inspection Using Electrical Tomography Measurements. Przegląd Elektrotechniczny 2018, 94, 97–100.
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126.
- Shelikhov, G.S.; Glazkov, Y.A. On the improvement of examination questions during the nondestructive testing of magnetic powder. Russ. J. Nondestruct. Test. 2011, 47, 112–117.
- García-Arribas, A.; Martínez, F.; Fernández, E. GMI detection of magnetic-particle concentration in continuous flow. Sens. Actuators Phys. 2011, 172, 103–108.
- Chen, J.; Liu, Z.; Wang, H.; Núñez, A.; Han, Z. Automatic defect detection of fasteners on the catenary support device using deep convolutional neural network. IEEE Trans. Instrum. Meas. 2017, 67, 257–269.
- Tsuboi, H.; Seshima, N.; Sebestyén, I.; Pávó, J.; Gyimóthy, S.; Gasparics, A. Transient eddy current analysis of pulsed eddy current testing by finite element method. IEEE Trans. Magn. 2004, 40, 1330–1333.
- Tian, G.Y.; Sophian, A. Defect classification using a new feature for pulsed eddy current sensors. NDT-E Int. 2005, 38, 77–82.
- Yang, H.; Yu, L. Feature extraction of wood-hole defects using wavelet-based ultrasonic testing. J. For. Res. 2017, 28, 395–402.
- Gholizadeh, S. A review of non-destructive testing methods of composite materials. Procedia Struct. Integr. 2016, 1, 50–57.
- Fang, Y.; Lin, L.; Feng, H.; Lu, Z.; Emms, G.W. Review of the use of air-coupled ultrasonic technologies for nondestructive testing of wood and wood products. Comput. Electron. Agric. 2017, 137, 79–87.
- Bernasconi, A.; Carboni, M.; Comolli, L.; Galeazzi, R.; Gianneo, A.; Kharshiduzzaman, M. Fatigue crack growth monitoring in composite bonded lap joints by a distributed fibre optic sensing system and comparison with ultrasonic testing. J. Adhes. 2016, 92, 739–757.
- Aytekin, Ç.; Rezaeitabar, Y.; Dogru, S.; Ulusoy, I. Railway fastener inspection by real-time machine vision. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 1101–1107.
- Lin, H.; Chen, H. Automated visual fault inspection of optical elements using machine vision technologies. J. Appl. Eng. Sci. 2018, 16, 447–453.
- Shanmugamani, R.; Sadique, M.; Ramamoorthy, B. Detection and classification of surface defects of gun barrels using computer vision and machine learning. Measurement 2015, 60, 222–230.
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72, 303–315.
- Habib, M.A.; Kim, C.H.; Kim, J. A Crack Characterization Method for Reinforced Concrete Beams Using an Acoustic Emission Technique. Appl. Sci. 2020, 10, 7918.
- Yang, Y.; Pan, L.; Ma, J.; Yang, R.; Zhu, Y.; Yang, Y.; Zhang, L. A High-Performance Deep Learning Algorithm for the Automated Optical Inspection of Laser Welding. Appl. Sci. 2020, 10, 933.
- Zhong, J.; Liu, Z.; Han, Z.; Han, Y.; Zhang, W. A CNN-Based Defect Inspection Method for Catenary Split Pins in High-Speed Railway. IEEE Trans. Instrum. Meas. 2019, 68, 2849–2860.
- He, Y.; Song, K.; Meng, Q.; Yan, Y. An end-to-end steel surface defect detection approach via fusing multiple hierarchical features. IEEE Trans. Instrum. Meas. 2020, 69, 1493–1504.
- Khan, F.; Salahuddin, S.; Javidnia, H. Deep Learning-Based Monocular Depth Estimation Methods—A State-of-the-Art Review. Sensors 2020, 20, 2272.
- Yang, G.; Yang, J.; Sheng, W.; Fernandes, F.E., Jr.; Li, S. Convolutional Neural Network-Based Embarrassing Situation Detection under Camera for Social Robot in Smart Homes. Sensors 2018, 18, 1530.
- Borji, A.; Cheng, M.; Jiang, H.; Li, J. Salient object detection: A benchmark. IEEE Trans. Image Process 2015, 24, 5706–5722.
- Ciaburro, G. Sound event detection in underground parking garage using convolutional neural network. Big Data Cogn. Comput. 2020, 4, 20.
- Ciaburro, G.; Iannace, G. Improving Smart Cities Safety Using Sound Events Detection Based on Deep Neural Network Algorithms. Informatics 2020, 7, 23.
- Costa, D.G.; Vasques, F.; Portugal, P.; Ana, A. A distributed multi-tier emergency alerting system exploiting sensors-based event detection to support smart city applications. Sensors 2020, 20, 170.
- Iannace, G.; Ciaburro, G.; Trematerra, A. Fault diagnosis for UAV blades using artificial neural network. Robotics 2019, 8, 59.
- Peng, L.; Liu, J. Detection and analysis of large-scale WT blade surface cracks based on UAV-taken images. IET Image Processing 2018, 12, 2059–2064.
- Saied, M.; Lussier, B.; Fantoni, I.; Shraim, H.; Francis, C. Fault Diagnosis and Fault-Tolerant Control of an Octorotor UAV using motors speeds measurements. IFAC-PapersOnLine 2017, 50, 5263–5268.
- Deng, L.; Yu, D. Deep learning: Methods and applications. Found. Trends Signal Process. 2014, 7, 197–387.
- Tao, X.; Wang, Z.; Zhang, Z.; Zhang, D.; Xu, D.; Gong, X.; Zhang, L. Wire Defect Recognition of Spring-Wire Socket Using Multitask Convolutional Neural Networks. IEEE Trans. Compon. Packag. Manuf. Technol. 2018, 8, 689–698.
- Jiang, J.; Chen, Z.; He, K. A feature-based method of rapidly detecting global exact symmetries in CAD models. Comput. Aided. Des. 2013, 45, 1081–1094.
- Cheng, J.C.P.; Wang, M. Automated detection of sewer pipe defects in closed-circuit television images using deep learning techniques. Autom. Constr. 2018, 95, 155–171.
- Bergmann, P.; Löwe, S.; Fauser, M.; Sattlegger, D.; Steger, C. Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders. arXiv 2018, arXiv:1807.02011.
- Yang, J.; Yang, G. Modified Convolutional Neural Network Based on Dropout and the Stochastic Gradient Descent Optimizer. Algorithms 2018, 11, 28.
- Sun, K.; Zhang, J.; Zhang, C.; Hu, J. Generalized extreme learning machine autoencoder and a new deep neural network. Neurocomputing 2017, 230, 374–381.
- Yu, L.; Chen, H.; Dou, Q.; Qin, J.; Heng, P.A. Automated melanoma recognition in dermoscopy images via very deep residual networks. IEEE Trans. Med. Imaging 2016, 36, 994–1004.
- Xue, Y.; Li, Y. A Fast Detection Method via Region-Based Fully Convolutional Neural Networks for Shield Tunnel Lining Defects. Comput. Civ. Infrastruct. Eng. 2018, 33, 638–654.
- Lei, J.; Gao, X.; Feng, Z.; Qiu, H.; Song, M. Scale insensitive and focus driven mobile screen defect detection in industry. Neurocomputing 2018, 294, 72–81.
- Lukoševičius, M.; Jaeger, H. Reservoir computing approaches to recurrent neural network training. Comput. Sci. Rev. 2009, 3, 127–149.
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90.
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324.
- Li, J.; Su, Z.; Geng, J.; Yixin, Y. Real-time detection of steel strip surface defects based on improved yolo detection network. IFAC-PapersOnLine 2018, 51, 76–81.
- Ozkan, S.; Kaya, B.; Akar, G.B. Endnet Sparse autoencoder network for endmember extraction and hyperspectral unmixing. IEEE Trans. Geosci. Remote Sens. 2018, 57, 482–496.
- Mei, S.; Wang, Y.; Wen, G. Automatic fabric defect detection with a multi-scale convolutional denoising autoencoder network model. Sensors 2018, 18, 1064.
- Toğaçar, M.; Ergen, B.; Cömert, Z. Waste classification using AutoEncoder network with integrated feature selection method in convolutional neural network models. Measurement 2020, 153, 107459.
- Long, J.; Sun, Z.; Li, C.; Ying, H.; Yun, B.; Zhang, S. A novel sparse echo autoencoder network for data-driven fault diagnosis of delta 3-D printers. IEEE Trans. Instrum. Meas. 2019, 69, 683–692.
- Chen, K.; Chen, K.; Wang, Q.; Ziyu, H.; Jun, H.; Jinliang, H. Short-term load forecasting with deep residual networks. IEEE Trans. Smart Grid 2018, 10, 3943–3952.
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778.
- Creswell, A.; White, T.; Dumoulin, V.; Arulkumaran, K.; Sengupta, B.; Bharath, A.A. Generative adversarial networks: An overview. IEEE Signal Proc. Mag. 2018, 35, 53–65.
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651.


