 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Guilherme Marcel Dias Santana | + 4447 word(s) | 4447 | 2021-02-03 08:56:08 | | | |
| 2 | Vivi Li | Meta information modification | 4447 | 2021-02-13 15:31:31 | | |
Video Upload Options
Unmanned Aerial Vehicles (UAVs) demand technologies so they can not only fly autonomously, but also communicate with base stations, flight controllers, computers, devices, or even other UAVs. Still, UAVs usually operate within unlicensed spectrum bands, competing against the increasing number of mobile devices and other wireless networks. Combining UAVs with Cognitive Radio (CR) may increase their general communication performance, thus allowing them to execute missions where the conventional UAVs face limitations. CR provides a smart wireless communication which, instead of using a transmission frequency defined in the hardware, uses software transmission. CR smartly uses free transmission channels and/or chooses them according to application’s requirements. Moreover, CR is considered a key enabler for deploying technologies that require high connectivity, such as Smart Cities, 5G, Internet of Things (IoT), and the Internet of Flying Things (IoFT).
1. Introduction
An Unmanned Aerial Vehicle (UAV), also known as drone, is an aircraft without passengers on board. Thus, the term “unmanned” implies a total absence of humans within the aircraft [1]. In this regard, UAVs need not only hardware and software capable of providing stability and preprogrammed flight navigation control [2], but also robust, effective, and secure communication technologies that enable them to communicate with base stations, air traffic controllers, other UAVs, or other devices and computers [1].
Although UAVs were initially designed for military action, the mass production of high-performance, low-cost, intelligent UAVs has made them suitable for different applications. These applications include video streaming, amateur photography and filming, people and environment monitoring, rescue and research, traffic control, and disaster recovery [3][4]. In fact, UAVs are currently being considered as an important part of the next generation of wireless networks 5G with the so-called cellular-connected UAVs [5], where they play a critical role to provide great performance improvements, thus bringing more opportunities to the Internet of Things (IoT) and more diversity for 5G communications.
Likewise, while performing their missions, the UAVs may work within an IoT [6] context when equipped with IoT devices. Herewith, the UAVs will form an innovative IoT platform operating in the skies, thus being part of a new concept known as the Internet of Flying Things (IoFT) [7]. For this purpose, UAVs need to support instantaneous and real-time communication, and offer access to high-resolution files (e.g., videos streaming and high-definition images), even if they are in an overcrowded area. That is the reason why 5G networks are considered a key enabler for the IoT and the IoFT. In this sense, the ultra-reliable and low latency (URLLC) mode of communication expected with 5G networks would not only provide the UAVs with the necessary IoT requirements but also provide coverage at high altitudes. Furthermore, the tasks of 5G networks may support remote change, and the planning of flight routes will be enhanced with the potential benefits of a 5G communication, thus preventing UAVs from colliding with each other [8].
Regarding the impact on spectral usage expected for the massive connections of UAVs in 5G, an important issue to be addressed is how these devices will be connected to future networks in a spectral efficient manner. It is known that despite the need for more robust and secure communication UAVs traditionally operate within unlicensed spectrum bands (i.e., open/free spectrum), such as IEEE S-Band, IEEE L-Band, and ISM, fixedly defined in their hardware. Therefore, the UAVs increasingly face competition, thus competing with a growing number of mobile devices (e.g., smartphones and tablets), operating within other wireless networks (e.g., Wi-Fi and bluetooth) that use the same spectrum bands. However, besides interfering the UAVs communications, this competition will not be bearable anymore, once a massive number of UAVs is expected to be connected, which will lead to a serious problem of spectrum scarcity and security-related problems [9]. In this context, Cognitive Radio (CR) emerges as a promising technology to solve these issues by enabling Dynamic Spectrum Access (DSA) [10].
Proposed by Mitola [11], CR is a smart wireless communication implemented in a Software-Defined Radio (SDR). An SDR sets its transmission frequency in software rather than in hardware, thus allowing the CR to intelligently switch to different channels. To switch channels, CR senses the radio spectrum environment around it and adapts its own configurations accordingly to increase reliability and efficient spectrum usage [10]. Furthermore, CR is considered a key enabling technology for 5G in emerging IoT applications [12]. Therefore, CR can provide UAVs with promising features for their massive deployment, such as reduced energy consumption and delay, opportunistic spectrum use based on application requirements, and a security enhancement, as CR does not suffer the effects of some conventional attacks.
These features would allow CR-based UAVs to perform in situations where traditional UAVs face limitations, or are often subject to being hacked. Moreover, CR alongside 5G would permit the UAVs to work in an IoFT role within an IoT context. This would fulfill the increasing growth of applications requiring highly connected devices, such as Smart Cities [13]. However, although UAVs and CR are well-established research fields, the integration between the two is fairly unexplored [9]. Many issues remain open, such as the impact of the UAVs mobility on CR and the definition of hardware compatible with both. These open issues allow new research opportunities and advances into the state-of-the-art.
2. CR-Based UAVs
A CR-based UAV may be seen as a UAV with an SDR platform embedded to it. It should also contain a computational unity that interacts with the SDR platform in order to autonomously take decisions regarding the radio spectrum usage. In this section, we first discuss the need for CR-based UAVs, potential applications, and hardware/software characteristics.
2.1. The Need for CR-Based UAVs
Herein, we define the most prominent aspects regarding the paramount importance of CR in the context of UAVs.
2.1.1. Security
Communication security is critically important for UAVs. These aircraft are also considered critical systems, a security issue, which can be used to manage confidential information, thus, in a UAV, may often represent a serious safety issue. Some conventional attacks, such as jamming and location spoofing (sometimes referred to as GPS spoofing or GNSS spoofing), could lead the base station to lose the UAV. This problem is particularly evident in overcrowded or hostile areas.
Jamming is an attack in the physical layer which causes a high interference to a spectrum band by overloading it. It may provoke the attacked devices to present an excessive energy consumption due to package retransmission, or even interrupt its communication channel [7]. When a CR is under a jamming attack, it simply understands that spectrum band as being busy or overcrowded, and then it switches its transmission to a new channel, thus avoiding the attack. In order to succeed in their jamming attempt, the attackers would have to keep detecting the new CR frequency and switch to the same frequency. For this, however, the attackers themselves would need to also be equipped with a CR device and more sophisticated algorithms.
Location spoofing attacks also happen in the physical layer, and they have become more frequent. It happens when an attacker uses a signal that is stronger than and mimics the attributes of a genuine location satellite signal to spoof the receiver [7]. By using a location spoofing attack, attackers may capture UAVs and/or take control of their flight path. Such attacks have become easy to launch [14]. However, location spoofing attacks are much more complex to execute to CR devices. The work in [15] provides some strategies for spoofing attack detection and countermeasure solutions in CR networks.
Therefore, UAVs may benefit from CR technology security. Conventional jamming and GPS spoofing strategies may be easily avoided by CR. These attacks are only possible to CR when the attacker is also using a CR with different and specific strategies; therefore, attacking a CR device is a more complex problem than attacking conventional wireless devices. Herein, we define the most prominent aspects regarding the paramount importance of CR in the context of UAVs.
2.1.2. Energy Efficiency
Although CR devices may represent a computational overload to UAVs, they may be capable of actually reducing energy consumption to these aircraft. Because the UAVs operate in overcrowded spectrum bands, they are susceptible to a high number of loss, thus increasing packet retransmission. The energy consumed for packet retransmission may be greatly reduced when a UAV is equipped with a CR.
Li et al. [16] proposed a method to maximize energy efficiency based on a joint optimization with medium access control (MAC) and physical layers, considering CR networks. In their scenario, a CR user senses different channels simultaneously and uses some idle ones for data transmission. The authors showed that the more channels the CR device is able to use, the more efficient is its bits/joule ratio throughput. The bits/second ratio also increased with the number of channels used.
2.1.3. Spectrum Scarcity
Despite a massive growth in the number of wireless connected devices, most of the radio spectrum is underutilized. Because of the fixed spectrum allocation policy, a big portion of the radio spectrum is reserved to sporadic PUs, while other spectrum portions are overloaded, such as Wi-Fi and mobile bands. Moreover, the UAVs traditionally operate within unlicensed spectrum bands (i.e., open/free spectrum), such as IEEE S-Band, IEEE L-Band, and ISM, fixedly defined in their hardware, under the same fixed spectrum allocation policy [17].
In this context, CR emerges as a promising technology to solve these issues by enabling DSA [10]. CR-based UAVs are able to select idle spectrum bands for communicating. Thus, the UAV overall communication quality increases when using CR, especially in overcrowded areas.
2.1.4. Application Requirements
UAVs may often be deployed in missions where they are expected to broadcast live video and to send high definition pictures to the base station. However, live stream broadcast tolerate packet loss, but require a high bandwidth for the timely data delivery. Sending high definition pictures is the opposite operation, as the UAV may need a low bandwidth with no packet loss tolerance, but with delay tolerance [9].
While traditional UAVs may face this problem, CR-based UAVs may easily deal with it. CR-based UAVs may change their communication frequency accordingly to application requirements. Thus, a UAV equipped with CR technology may be live streaming video and switch to a low bandwidth to send a large file when required. This feature not only optimizes the overall network performance of CR-based UAVs, but it also opens new application opportunities for these aircraft. For instance, they can be used to improve the communication performance of terrestrial users in 5G, through the UAV-assisted 5G communications [18].
2.2. Potential Applications
In the last few years, emerged a growing trend to rely on UAVs as a support tool on critical missions, such as military surveillance [19], forest fire monitoring [20], crop monitoring [21][22][23], traffic surveillance [24], border patrolling [25], natural disasters area surveillance and support [26][27][28], and commercial drones [29]. However, these areas usually suffer from infrastructure issues that could possibly lead to spectrum scarcity or anomalous PUs behavior [30][31]. Thus, an integration between UAVs and CR could be useful for these scenarios due to its spectrum sensing and handover capabilities.
As well as the spectrum uncertainty scenario set up by emergency conditions, densely populated areas such as big cities can likewise go through overcrowded frequency bands, mainly motivated for the growing volume of wireless network users. Although spectrum scarcity is perceived as a harmless effect, the falling of a UAV in a crowded area due to an unstable communication could inflict much damage depending on the aircraft size and set up [32]. One potential advantage of CR utilization is the potential increase in the Quality of Service (QoS) caused by applying the spectrum handover capabilities to identify and relocate to less occupied frequency bands, thus adding to the stability of the data transmission between UAVs and their base stations.
In order to avoid the spectrum scarcity caused by densely populated areas, the UAV can previously adjust its flight path considering the spectrum availability, as applied in [33] using cellular data network. To accomplish this application, it can be done a mapping of several frequency bands of the area in which the UAV would be deployed, therefore enabling the occupancy pattern recognition and, subsequently, prediction by machine learning (ML) algorithms [34].
2.2.1. Internet of Flying Things
The increased demand for highly connected devices originated the concept of IoT. In IoT, a massive number of “things” (i.e., devices) are connected to the Internet, in order to exchange information for the most diverse applications and purposes, from gains in efficiency to expansion of functions.
Because of the IoT rise, there is a major demand for integrating UAVs with this network. However, due to the special features involving Flying Ad hoc Networks (FANETS) and these aircraft, the IoFT was created. IoFT is a new research field that differs to IoT in scope of research, despite being related areas.
IoFT specific challenges range from regulatory issues to hardware and software limitations. Regarding security, as the UAVs are critical embedded systems, so a network security issue may generate a safety issue. The security challenges in IoFT are diverse, involving the physical, data link, transport, session, and application layers [7].
2.2.2. UAV-Aided 5G
UAVs may play an important role for 5G and beyond 5G (B5G), as future dronecell networks [35]. Because cellular-connected UAV communication has unique characteristics related to ground conventional cellular communication, this field offers new research challenges and opportunities. Zeng et al. [5] presented an overview of 5G in UAV communications, as well as emerging technologies and potential challenges.
CR is an enabling technology for using UAVs in 5G networks. In 5G, CR-based UAVs may simultaneously access the wireless channel and fulfill their different roles in traffic surveillance, disaster management, and package delivery [18].
2.3. Hardware Characteristics
Usually, CR hardware consists of a radio platform, typically an SDR, and a computer platform. The Wireless Open-Access Research Platform (WARP) from Rice University [36] and the USRP from Ettus Research [37] are the most commonly deployed radio platforms for CR [38].
A recent implementation of SDR, however, has been carried out using various methods rather than considering the integration with UAVs. As a consequence, for UAVs, overhead, energy consumption, and time delays associated with conventional SDR are constraints. Alternatively, Young and Bostian [38] built the SKIRL, a simple and low-cost RFIC-based RF CR platform suitable for the experimentation of small radio-controlled UAVs. The Hope RF RFM22B [39] was used as the radio platform, whereas the BeagleBoard-xM [40] single board was deployed as the computer unit. This was done to reduce resource consumption and simplify CR design.
Figure 4 shows the physical dimensions of the USRP B200, 97 × 155 millimeters, and the Hope RF RFM23B, 16 × 16 millimeters. For UAVs, particularly for micro UAVs, where physical space is limited, so if a large board is inserted to it, series of changes may be triggered in the aircraft system, configuration, and scale. Thus, this difference in size is critical. Moreover, the energy consumption of the Hope RF RFM22B is just 0.306 Wh in the worst case scenario. The USRP B200, on the other hand, may have up to 4.092 Wh of energy consumption. Because the energy capacity of a LiFe SourceHCAM6426 UAV lithium battery, a typical UAV battery, is just 12 Wh, energy consumption is a key aspect to take into account in this context.
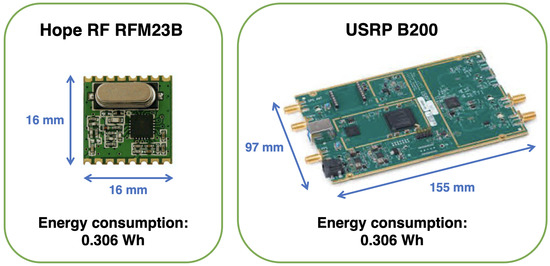
Figure 4. Physical aspects of the Hope RF RFM23B on the left and the USRP B200 on the right. The boards are shown in different size scales. Adapted from the work in [41].
2.4. Software Characteristics
The CR software design and applications can be divided into multiple categories, from MAC protocols and routing algorithms to machine learning approaches used to predict channel occupancy. In this work, we summarize three of those categories: (i) spectrum sensing algorithms, focusing mainly on transmitter detection and identification of spectrum holes [42][43]; (ii) methods to perform the spectrum handover [44]; and (iii) and simulation software [45].
2.4.1. Spectrum Sensing
The literature commonly refers to spectrum sensing as the procedure of gathering and analyzing radio data to establish the spectrum occupancy [46]. In order to detect transmitters, some well-known methods can be employed, i.e., Energy detector, Matched-filter, and Cyclostationary feature detection. These algorithms are connected with two hypotheses formally defined as [47][48]
(1)
where indicates the presence of a licensed user, whereas represents the null hypothesis. x represents the received signal, t is the time sample, and s and n denote the PU signal and the additive noise, respectively.
In cases where the signal receiver has no prior information about the PU signal, the energy detector algorithm may be deployed at a low computational cost. It functions by comparing a signal sample from the data to a predefined threshold, where a value higher than the threshold suggests the presence of a primary user, whereas a value smaller than the threshold implies the lack of band utilization. The main downside of this approach is the fixed threshold value, as noise power can differ over time possibly assuming unknown behavior. In this case, the threshold could be surpassed by the noise power, indicating an invalid PU presence in a given spectrum band [49][50].
The matched-filter contrasts the current signal with previous collected samples from the same transmitter, in comparison to the energy method. It appears to be more precise, has a shorter sensing time and maximizes the ratio of signal to noise (SNR). However, the need for prior knowledge of the form of the transmitter signal restricts its feasibility only to the point where licensed users cooperate [51].
In order to check whether or not the transmitted signal has periodicity, the cyclostationary feature detection adopts a spectral correlation function (SCF) [52]. Unlike the previous approaches, it helps the CR user to distinguish between noise and user signal, improving the efficiency of the algorithm in channels where there is greater noise [53]. Because of its computational complexity, perhaps the most serious drawback of this approach is the need for long processing time, an undesired characteristic for small energy consumption systems such as UAVs.
Finally, machine learning approaches have been adopted in the literature to enhance the detection of transmitters. The authors of [54] achieved an overall success rate of over 99.50% in predicting PU presence by using an Artificial Neural Network (ANN) at different SNR frequencies. Similarly, Zhang et al. [55] proposed a cooperative detection device combining the energy detector with ANNs, adding a basic ANN for each SU, and a base station responsible for final decision-making, referred to as the Fusion Center. Matinmikko et al. [56] proposed a new Fuzzy logic system to adapt each spectrum scenario to the most suitable transmitter detection algorithm. The reader may refer to the works in [57][58] for further information concerning spectrum sensing techniques.
2.4.2. Spectrum Handover
The channel occupied by an unlicensed should ideally be vacant when a PU arrives. This is desirable in order to generate minimal interference to the primary user transmission. The literature generally refers to the process of hoping to another channels as spectrum handover. It involves distinct strategies with regards to its integration with spectrum sensing, such as non-handover, pure proactive, pure reactive, hybrid, and ML approaches, which incorporates the preceding [44].
In the non-handover strategy, the SU remains idle until the PU leaves the channel, resuming the transmission of data later. Although spectrum sensing is limited solely to current channel monitoring, the drawback of this concept is unveiled during a long PU transmission, which significantly restricts the transmission time available to the SU, in terms of detection of PU arrivals and departures.
Unlike non-handover, before and after the arrival of the PU, both pure proactive and reactive strategies concentrate on handover to an idle channel, respectively. The pure proactive algorithm tries to predict the arrival of the PU while perceiving the atmosphere to locate a spectrum hole based on the traffic pattern of the channel. On the contrary, after the identification of the PU, the pure reactive approach only senses and switches to an unused channel. A potential disadvantage in the pure proactive method may be created by a poor prediction of traffic, leading to an unnecessary handover, whereas the pure reactive approach may have a greater handover delay just after a PU arrival due to the execution of the spectrum sensing stage.
The hybrid handover strategy, taking advantage of the advantages of both methods, incorporates both the proactive spectrum sensing phase, perceiving the spectrum holes before the arrival of the PU, and reactive handover action. Therefore, due to the proactive process, the handover delay is reduced, and not every PU arrival needs to be predicted by the algorithm. However, the backup channel can become obsolete before use, as in the proactive method, thus driving the algorithm to perform a supplementary spectrum sensing phase.
The literature has stressed the utility of ML algorithms to overcome the complexities of spectrum handover. Trigui et al. [59] developed a method of negotiating multi-agent systems that enables SUs to migrate opportunistically to the most adequate spectrum band provided its characteristics, achieving around 97% of spectrum utilization. An investigation on the Hidden Markov Model (HMM) application for spectrum handover and simulated data showed that in detecting transmission opportunities, this technique can give SUs greater accuracy [60]. Finally, in order to achieve dynamic handover management, Anandakumar and Umamaheswari [61] suggested a supervised Machine Learning (ML) approach referred to as Spectrum Particle Swarm Optimization (SpecPSO), using Visitor Location Register and Home Location Register databases to train the algorithm.
2.4.3. Simulation Tools
All levels of abstraction, from the physical layer to protocols and routing, should be associated with a full CR simulation program. We have not found a method in the literature that embodies all these characteristics. The only way to do this, to the best of our knowledge, is to combine open source resources, such as radio simulators (e.g., GNU Radio [62] and CogWave [63]) and general network simulators (e.g., Omnet++ [64] and ns-3 [65]).
GNU Radio is a free and open source software designed to use its graphical user interface flow graphs to simulate radio transmissions and signal processing (GNU Radio Companion). It could be compared to LabView [66] and Simulink [67]. Standard flow graph blocks encompass waveform generators, modulators, instrumentation sinks, math operators, filters, and Fourier analysis. It also facilitates the development of new blocks using the programming language C++, as well as the design of the flow graph using Python. In addition, GNU Radio can be connected to SDR hardware, thus allowing simulations from the testbed to be used.
Another open-source program suggested for designing CR waveforms is CogWave. It involves many modulation systems, including multichannel DAA-OFDM, Fathers, and others from GNU Radio (e.g., OFDM, BPSK, and QPSK). During run-time, CogWave is able to reconfigure the modulation scheme and can communicate with SDR hardware, as well as GNU Radio, to provide real-time transmission between USRP devices.
Omnet++ and INET [68] have been widely used in the literature to simulate CR networks for general network simulators [69][70][71]. Omnet++ offers a C++ component-based architecture where modules and components can be assembled using a graphical user interface or a high-level network description language, similar to flow graphs in GNU Radio (NED). Its modular architecture therefore eases the reusability of the built models. Furthermore, INET offers protocols, templates, routing, and mobility simulation as an open-source model library for Omnet++.
Another well-established tool is the ns-3. It is an open discrete-event simulation environment for network research that provides C++ libraries of models for wired protocols, IP and non-IP, wireless, dynamic routing protocols, and so forth. For instance, the ns-3 has been applied in the simulation of CR networks regarding spectrum handover [72], data collection [73], and channel sharing [74].
It is necessary to note that many programming languages can be used to build a custom simulator, as they provide access to several network and scientific libraries (e.g., Java, C++, Python, and Julia). However, most simulation scenarios encountered in the literature are complex enough to require thousands of lines of code, turning this option impractical for most of the problems.
2.5. Spectrum Mobility
When a PU resumes transmission through the same channel as the SU, the latter has to vacate the channel by suspending its transmission and restart communication through a vacant channel. This CR feature is called Spectrum Mobility [44].
It is considered a daunting problem due to the erratic behavior of the wireless medium in combination with the high mobility of UAVs. Thus, network protocols for ground-based networks could not perform as expected for UAVs, and their high mobility should be taken into account when designing CR-based UAV transport protocols [9][75].
One of the forms in which an SU does not trigger disruption in a PU-licensed band is to perform a spectrum handover as soon as the SU detects the existence of the PU. In general, UAVs take their places in a CR network as SUs, and they are likely to conduct a high number of spectrum handovers, as they will be on a mission throughout their route in the presence of various PUs. Therefore, spectrum handover is a key element in CR-based UAVs.
A general spectrum handover process is shown in Figure 5. A SU keeps monitoring the spectrum environment during the evaluation phase by sensing it. The link maintenance process begins when a handover signal is identified, then the SU pauses its transmission and performs a channel handover to a backup channel and resumes its transmission, returning to the evaluation phase.
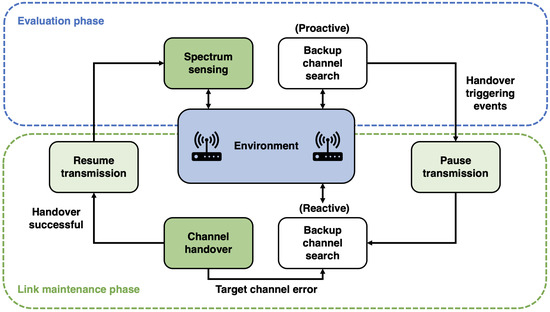
Figure 5. Spectrum handover process. Adapted from the work in [44].
A handover trigger could be provided by a PU or by the SU itself, depending on the application purposes and signal quality. Depending on the spectrum handover strategy, a backup channel could be searched proactively during the assessment process, and a channel handover could also be performed proactively.
On the other hand, both backup channel scanning and channel handover are performed reactively in a reactive technique. A new backup channel has to be checked, and another channel handover attempt is made if a channel handover is not successful due to any incident affecting the target channel (e.g., a PU started a transmission through the target channel) [44].
Considerable energy consumption is required in a spectrum handover. Furthermore, some communication problems, such as packet loss and delay, may increase during the spectrum handover process. In a spectrum handover, delay is also a significant performance factor [76].
Figure 6 demonstrates the effect of the spectrum handover delay over a SU after many PU channel reclaims. In that case, an SU establishes a connection whose operation requires the completion of 7 time slots. However, due to successive PU arrivals, the process needs 9 time slots. Nevertheless, as the existence of a PU on channel Ch1 is quite short, the first SU channel handover was unnecessarily executed, which means that the SU was submitted to excessive channel handover costs [77].
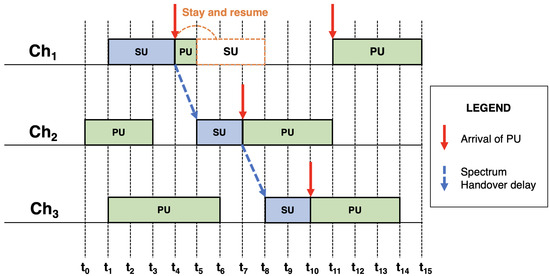
Figure 6. Spectrum handover delay caused to an SU. Adapted from the work in [77].
UAVs designed for real-time multimedia broadcasting can cause unsatisfactory user experience, as spectrum handover latency can have a significant effect on delay-sensitive applications. For optimal transmission, therefore, delay reduction has to be considered [78].
References
- Valavanis, K.P.; Vachtsevanos, G.J. (Eds.) Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; p. 3022.
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; Aerospace Series; Wiley: Chichester, UK, 2010.
- de Melo Pires, R.; Arnosti, S.Z.; Pinto, A.S.R.; Branco, K.R.L.J.C. Experimenting Broadcast Storm Mitigation Techniques in FANETs. In Proceedings of the 2016 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016; pp. 5868–5877.
- Arnosti, S.Z.; Pires, R.M.; Branco, K.R.L.J.C. Evaluation of Cryptography Applied to Broadcast Storm Mitigation Algorithms in FANETs. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1368–1377.
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-Connected UAV: Potential, Challenges and Promising Technologies. IEEE Wirel. Commun. 2019, 26, 120–127.
- Gershenfeld, N.; Krikorian, R.; Cohen, D. The Internet of Things. Sci. Am. 2004, 291, 76–81.
- Fernando, P.D.; Mariana, R.; Vitor, C.F.J.; Roschildt, P.A.S.; James, S.; Castelo, B.K.R.L.J. The Internet of Flying Things. In Internet of Things A to Z; Wiley-Blackwell: Hoboken, NJ, USA, 2018; Chapter 19; pp. 529–562.
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134.
- Saleem, Y.; Rehmani, M.H.; Zeadally, S. Integration of Cognitive Radio Technology with unmanned aerial vehicles: Issues, opportunities, and future research challenges. J. Netw. Comput. Appl. 2015, 50, 15–31.
- Reyes, H.; Gellerman, N.; Kaabouch, N. A Cognitive Radio System for Improving the Reliability and Security of UAS/UAV Networks. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–9.
- Mitola, J. Cognitive Radio: An Integrated Agent Architecture for Software Defined Radio, Doctor of Technology. Ph.D. Dissertation, Royal Institute of Technology, Stockholm, Sweden, 2000; pp. 271–350.
- Akpakwu, G.A.; Silva, B.J.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on 5G Networks for the Internet of Things: Communication Technologies and Challenges. IEEE Access 2018, 6, 3619–3647.
- Chourabi, H.; Nam, T.; Walker, S.; Gil-Garcia, J.R.; Mellouli, S.; Nahon, K.; Pardo, T.A.; Scholl, H.J. Understanding Smart Cities: An Integrative Framework. In Proceedings of the 2012 45th Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2012; pp. 2289–2297.
- Hosseini, N.; Matolak, D.W. Software Defined Radios as Cognitive Relays for Satellite Ground Stations Incurring Terrestrial Interference. In Proceedings of the 2017 Cognitive Communications for Aerospace Applications Workshop (CCAA), Cleveland, OH, USA, 27–28 June 2017; pp. 1–4.
- Zeng, K.; Ramesh, S.K.; Yang, Y. Location Spoofing Attack and its Countermeasures in Database-Driven Cognitive Radio Networks. In Proceedings of the 2014 IEEE Conference on Communications and Network Security, San Francisco, CA, USA, 29–31 October 2014; pp. 202–210.
- Li, L.; Zhou, X.; Xu, H.; Li, G.Y.; Wang, D.; Soong, A. Energy-Efficient Transmission in Cognitive Radio Networks. In Proceedings of the 2010 7th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2010; pp. 1–5.
- Thomas, J.; Menon, P.P. A Survey on Spectrum Handoff in Cognitive Radio Networks. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; pp. 1–4.
- Naqvi, S.A.R.; Hassan, S.A.; Pervaiz, H.; Ni, Q. Drone-Aided Communication as a Key Enabler for 5G and Resilient Public Safety Networks. IEEE Commun. Mag. 2018, 56, 36–42.
- Ma’sum, M.A.; Arrofi, M.K.; Jati, G.; Arifin, F.; Kurniawan, M.N.; Mursanto, P.; Jatmiko, W. Simulation of Intelligent Unmanned Aerial Vehicle (UAV) For Military Surveillance. In Proceedings of the 2013 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Bali, Indonesia, 28–29 September 2013; pp. 161–166.
- Barrado, C.; Messeguer, R.; Lopez, J.; Pastor, E.; Santamaria, E.; Royo, P. Wildfire Monitoring Using a Mixed Air-Ground Mobile Network. IEEE Pervasive Comput. 2010, 9, 24–32.
- Herwitz, S.; Johnson, L.; Dunagan, S.; Higgins, R.; Sullivan, D.; Zheng, J.; Lobitz, B.; Leung, J.; Gallmeyer, B.; Aoyagi, M.; et al. Imaging from an Unmanned Aerial Vehicle: Agricultural Surveillance and Decision Support. Comput. Electron. Agric. 2004, 44, 49–61.
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.d.; Ribeiro, A.; Rossi, C. An Air-Ground Wireless Sensor Network for Crop Monitoring. Sensors 2011, 11, 6088–6108.
- Zarco-Tejada, P.J.; Berni, J.A.; Suárez, L.; Fereres, E. A New Era in Remote Sensing of Crops with Unmanned Robots. SPIE Newsroom 2008.
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. A Survey of Unmanned Aerial Vehicles (UAVs) for Traffic Monitoring. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 221–234.
- Sun, Z.; Wang, P.; Vuran, M.C.; Al-Rodhaan, M.A.; Al-Dhelaan, A.M.; Akyildiz, I.F. BorderSense: Border Patrol through Advanced Wireless Sensor Networks. Ad Hoc Netw. 2011, 9, 468–477.
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as Aerial Sensor Network for Disaster Management applications. e & i Elektrotechnik und Informationstechnik 2010, 127, 56–63.
- Neto, J.M.M.; da Paixão, R.A.; Rodrigues, L.R.L.; Moreira, E.M.; dos Santos, J.C.J.; Rosa, P.F.F. A Surveillance Task for a UAV in a Natural Disaster Scenario. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1516–1522.
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV Systems for Natural Disaster Management. Comput. Netw. 2017, 124, 72–86.
- The Institute. Will Delivery By Drone Become a Reality? Available online: http://theinstitute.ieee.org/ieee-roundup/members/achievements/will-delivery-by-drone-become-a-reality (accessed on 11 February 2018).
- Gorcin, A.; Arslan, H. Public Safety and Emergency Case Communications: Opportunities from the Aspect of Cognitive Radio. In Proceedings of the 2008 3rd IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks, Chicago, IL, USA, 14–17 October 2008; pp. 1–10.
- Ghafoor, S.; Sutton, P.D.; Sreenan, C.J.; Brown, K.N. Cognitive Radio for Disaster Response Networks: Survey, Potential, and Challenges. IEEE Wirel. Commun. 2014, 21, 70–80.
- Pegues, J. Drone Over White House Highlights Security Concerns. Available online: https://cbsn.ws/2zG8rtr (accessed on 24 November 2020).
- Chi, T.; Ming, Y.; Tseng; Kuo, S.; Liao, C. Civil UAV Path Planning Algorithm for Considering Connection with Cellular Data Network. In Proceedings of the 2012 IEEE 12th International Conference on Computer and Information Technology, Chengdu, China, 27–29 October 2012; pp. 327–331.
- Abbas, N.; Nasser, Y.; Ahmad, K. Recent Advances on Artificial Intelligence and Learning Techniques in Cognitive Radio Networks. EURASIP J. Wirel. Commun. Netw. 2015, 2015.
- Sekander, S.; Tabassum, H.; Hossain, E. Multi-Tier Drone Architecture for 5G/B5G Cellular Networks: Challenges, Trends, and Prospects. IEEE Commun. Mag. 2018, 56, 96–103.
- Rice University. WARP—Wireless Open-Access Research Platform. Available online: http://warpproject.org/ (accessed on 15 November 2020).
- Ettus Research. USRP—Universal Software Radio Peripheral. Available online: https://www.ettus.com/ (accessed on 15 November 2020).
- Young, A.R.; Bostian, C.W. Simple and Low-Cost Platforms for Cognitive Radio Experiments [Application Notes]. IEEE Microw. Mag. 2013, 14, 146–157.
- HOPE Microelectronics. RFM22B FSK Transceiver. Available online: http://www.hoperf.com/rf_transceiver/modules/RFM22BW.html (accessed on 15 November 2020).
- Texas Instruments. BeagleBoard.org—Community Supported Open Hardware Computers for Making. Available online: https://beagleboard.org/ (accessed on 8 August 2018).
- Santana, G.M.D.; Cristo, R.S.; Dezan, C.; Diguet, J.P.; Osorio, D.P.M.; Branco, K.R.L.J.C. Cognitive Radio for UAV Communications: Opportunities and Future Challenges. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems, Dallas, TX, USA, 12–15 June 2018; pp. 7–12.
- Malik, S.; Shah, M.; Dar, A.; Haq, A.; Khan, A.; Javed, T.; Khan, S. Comparative Analysis of Primary Transmitter Detection Based Spectrum Sensing Techniques in Cognitive Radio Systems. Aust. J. Basic Appl. Sci. 2010, 4, 4522–4531.
- Perera, L.N.T.; Herath, H.M.V.R. Review of Spectrum Sensing in Cognitive Radio. In Proceedings of the 2011 6th International Conference on Industrial and Information Systems, Tiruvannamalai, India, 7–9 January 2011; pp. 7–12.
- Christian, I.; Moh, S.; Chung, I.; Lee, J. Spectrum Mobility in Cognitive Radio Networks. IEEE Commun. Mag. 2012, 50, 114–121.
- Nir, V.L.; Scheers, B. Evaluation of Open-Source Software Frameworks for High Fidelity Simulation of Cognitive Radio Networks. In Proceedings of the 2015 International Conference on Military Communications and Information Systems (ICMCIS), Cracow, Poland, 18–19 May 2015; pp. 1–6.
- Hossain, E.; Niyato, D.; Kim, D.I. Evolution and Future Trends of Research in Cognitive Radio: A Contemporary Survey. Wirel. Commun. Mob. Comput. 2015, 15, 1530–1564.
- Zheng, J.; Chen, C.; Cheng, J.; Shi, L. Cognitive Radio: Methods for the Detection of Free Bands. In Proceedings of the 2009 International Conference on Networks Security, Wireless Communications and Trusted Computing, Wuhan, China, 25–26 April 2009; Volume 2, pp. 343–345.
- Abdelrassoul, R.; Fathy, E.; Zaghloul, M.S. Comparative Study of Spectrum Sensing for Cognitive Radio System Using Energy Detection over Different Channels. In Proceedings of the 2016 World Symposium on Computer Applications Research (WSCAR); 2016; pp. 32–35.
- Kim, H.; Shin, K.G. In-band Spectrum Sensing in Cognitive Radio Networks: Energy Detection or Feature Detection? In Proceedings of the MobiCom ’08, 14th ACM International Conference on Mobile Computing and Networking, San Francisco, CA, USA, 14–19 September 2008; ACM: New York, NY, USA, 2008; pp. 14–25.
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. A Survey on Spectrum Management in Cognitive Radio Networks. IEEE Commun. Mag. 2008, 46, 40–48.
- Kapoor, S.; Rao, S.; Singh, G. Opportunistic Spectrum Sensing by Employing Matched Filter in Cognitive Radio Network. In Proceedings of the 2011 International Conference on Communication Systems and Network Technologies, Katra, India, 3–5 June 2011; pp. 580–583.
- Oner, M.; Jondral, F. On the Extraction of the Channel Allocation Information in Spectrum Pooling Systems. IEEE J. Sel. Areas Commun. 2007, 25, 558–565.
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation Issues in Spectrum Sensing for Cognitive Radios. In Proceedings of the Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; Volume 1, pp. 772–776.
- Popoola, J.J.; van Olst, R. Application of Neural Network for Sensing Primary Radio Signals in a Cognitive Radio Environment. In Proceedings of the IEEE AFRICON’11, Livingstone, Zambia, 13–15 September 2011; pp. 1–6.
- Zhang, T.; Wu, M.; Liu, C. Cooperative Spectrum Sensing Based on Artificial Neural Network for Cognitive Radio Systems. In Proceedings of the 2012 8th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012; pp. 1–5.
- Matinmikko, M.; Ser, J.D.; Rauma, T.; Mustonen, M. Fuzzy-Logic Based Framework for Spectrum Availability Assessment in Cognitive Radio Systems. IEEE J. Sel. Areas Commun. 2013, 31, 2173–2184.
- Arjoune, Y.; Kaabouch, N. A Comprehensive Survey on Spectrum Sensing in Cognitive Radio Networks: Recent Advances, New Challenges, and Future Research Directions. Sensors 2019, 19, 126.
- Tavares, C.H.A.; Marinello, J.C.; Proenca, M.L., Jr.; Abrao, T. Machine Learning-Based Models for Spectrum Sensing in Sooperative Radio Networks. IET Commun. 2020, 14, 3102–3109.
- Trigui, E.; Esseghir, M.; Merghem-Boulahia, L. Multi-Agent Systems Negotiation Approach for Handoff in Mobile Cognitive Radio Networks. In Proceedings of the 2012 5th International Conference on New Technologies, Mobility and Security (NTMS), Istanbul, Turkey, 7–10 May 2012; pp. 1–5.
- Pham, C.; Tran, N.H.; Do, C.T.; Moon, S.I.; Hong, C.S. Spectrum Handoff Model Based on Hidden Markov Model in Cognitive Radio Networks. In Proceedings of the International Conference on Information Networking 2014 (ICOIN2014), Phuket, Thailand, 10–12 February 2014; pp. 406–411.
- Anandakumar, H.; Umamaheswari, K. Supervised Machine Learning Techniques in Cognitive Radio Networks During Cooperative Spectrum Handovers. Clust. Comput. 2017, 20, 1505–1515.
- GNU Radio. The Free and Open Software Radio Ecosystem. Available online: https://www.gnuradio.org/ (accessed on 15 November 2020).
- Nir, V.L. CogWave: Open-Source Software Framework for Cognitive Radio Waveform Design. Available online: https://github.com/vlenircissrma/CogWave (accessed on 15 November 2020).
- OpenSim Ltd. Omnet++: Discrete Event Simulator. Available online: https://www.omnetpp.org/ (accessed on 15 November 2020).
- GeorgiaTech. NS-3—A Discrete-Event Network Simulator for Internet Systems. Available online: https://www.nsnam.org/ (accessed on 15 November 2020).
- Instruments, N. LabVIEW—Laboratory Virtual Instrument Engineering Workbench. Available online: http://www.ni.com/en-us/shop/labview.html (accessed on 15 November 2020).
- MathWorks. Simulink—Simulation and Model-Based Design. Available online: https://www.mathworks.com/products/simulink.html (accessed on 15 November 2020).
- OpenSim Ltd. INET Framework for OMNeT++. Available online: https://inet.omnetpp.org/ (accessed on 15 November 2020).
- Pathak, M.; Dhurandher, S.K.; Woungang, I.; Tushir, B.; Kumar, V.; Takizawa, M.; Barolli, L. Power Control Scheme for Underlay Approach in Cognitive Radio Networks. In Proceedings of the 2016 19th International Conference on Network-Based Information Systems (NBiS), Ostrava, Czech Republic, 7–9 September 2016; pp. 114–118.
- Noor, N.M.; Din, N.M.; Ahmed, E.; Kadir, A.N.A. OMNET++ Based Cognitive Radio Simulation Network. In Proceedings of the 2016 7th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2016; pp. 28–33.
- Abeywardana, R.C.; Sowerby, K.W.; Berber, S.M. SimuCRV: A Simulation Framework for Cognitive Radio Enabled Vehicular Ad Hoc Networks. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5.
- Gkionis, G.; Michalas, A.; Sgora, A.; Vergados, D.D. An Effective Spectrum Handoff Scheme for Cognitive Radio Ad hoc Networks. In Proceedings of the 2017 Wireless Telecommunications Symposium (WTS), Chicago, IL, USA, 26–28 April 2017; pp. 1–7.
- Wu, Y.; Cardei, M. A Cognitive Radio Approach for Data Collection in Border Surveillance. In Proceedings of the 2016 IEEE 35th International Performance Computing and Communications Conference (IPCCC), Las Vegas, NV, USA, 9–11 December 2016; pp. 1–8.
- Bansal, T.; Li, D.; Sinha, P. Opportunistic Channel Sharingin Cognitive Radio Networks. IEEE Trans. Mob. Comput. 2014, 13, 852–865.
- Xie, J.; Wan, Y.; Kim, J.H.; Fu, S.; Namuduri, K. A Survey and Analysis of Mobility Models for Airborne Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1221–1238.
- Hanif, I.; Zeeshan, M.; Ahmed, A. Traffic Pattern Based Adaptive Spectrum Handoff Strategy for Cognitive Radio Networks. In Proceedings of the 2016 10th International Conference on Next Generation Mobile Applications, Security and Technologies (NGMAST), Cardiff, UK, 24–26 August 2016; pp. 18–23.
- Lertsinsrubtavee, A.; Malouch, N.; Fdida, S. Controlling Spectrum Handoff with a Delay Requirement in Cognitive Radio Networks. In Proceedings of the 2012 21st International Conference on Computer Communications and Networks (ICCCN), Munich, Germany, 30 July–2 August 2012; pp. 1–8.
- Wu, Y.; Yang, Q.; Liu, X.; Kwak, K.S. Delay-Constrained Optimal Transmission With Proactive Spectrum Handoff in Cognitive Radio Networks. IEEE Trans. Commun. 2016, 64, 2767–2779.

