 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Claude El-Bayeh | + 1967 word(s) | 1967 | 2021-01-20 13:21:18 | | | |
| 2 | Claude El-Bayeh | Meta information modification | 1967 | 2021-01-26 13:57:22 | | | | |
| 3 | Lily Guo | + 1038 word(s) | 3005 | 2021-02-01 04:57:11 | | | | |
| 4 | Lily Guo | Meta information modification | 3005 | 2021-02-01 07:18:19 | | |
Video Upload Options
Plug-in electric vehicles refer to vehicles that are powered by electricity from off-vehicle sources or can be self-contained with a battery, solar panels, fuel cells, or an electric generator to convert fuel to electricity. EVs include, but are not limited to, road and rail vehicles, surface and underwater vessels, electric aircraft, and electric spacecraft.
The literature covering Plug-in Electric Vehicles (EVs) contains many charging/discharging strategies. However, none of the review papers covers such strategies in a complete fashion where all patterns of EVs charging/discharging are identified.
1. Introduction
1.1. Motivation and Background
The world is encountering a reduction in fossil fuel reserves for the next few decades. For example, the worldwide production of oil is expected to expire in 53.3 years, that of natural gas is expected to expire in 55.1 years, and that of coal is expected to expire in 113 years[1]. The energy consumption is increasing each year[2], and the CO2 emission is also increasing[3]. It is estimated that 32.2 Gt of CO2 are produced in 2013 compared to 15.5 Gt in 1973[3]. The global temperature of the Earth is increasing each year, and it is predicted to rise by about 3.6 °C by 2040 compared to 2014[4]. The fuel oil consumption in the transportation sector overpassed 63.8% in 2013 with respect to the total consumption in the world, according to the International Energy Agency (IEA) [3]. The natural gas consumed by the transportation sector overpassed 6.9% in 2013[3]. Meanwhile, the electricity used for the transportation sector did not reach 1.5% in the whole world, which is negligible compared to the oil consumed in the sector[3]. All these reductions in the worldwide reserves have encouraged researchers, organizations, and governments to shift their source of energy to Renewable Energy Source (RESs) and to introduce Electric Vehicles (EVs), which use electric/hybrid motors as an alternative solution to the Internal Combustion Engine (ICE), which is used in most of the vehicles. The share of RESs in total power generation is expected to rise to 33% in 2040[4]. The market production and demand for EVs are increasing every year. They reached 740,000 vehicles in 2014[5], and it is expected to reach 20 million EVs in 2020[6] (In fact, the number of customers who purchase EVs increases by 10% every year[7]). According to a study done by Electric Power Research Institute (EPRI), a PHEV sedan might cost annually $175 (assuming average residential price of 11.4 cents per kWh, all currencies are in USD in this paper). Assuming a gasoline price of $3 per gallon assumption and that a conventional car would travel the same distance, the EPRI concludes that the average American driver might save up to $600 annually by using a PHEV[8]. Thus, the utilization of EVs is economical. Other benefits also are obtained from EVs. Many studies have been done to integrate them into the Power Grid (PG) in an optimized fashion to benefit from their integration. In addition to the many advantages of EVs, they also have limitations. Thus, to reduce the negative impact on the network, it is crucial to choose an optimized charging strategy.
1.2. Literature Review
A Plug-in Hybrid Electric Vehicle (PHEV) consumes energy from two sources: the fossil fuel and a battery, while a Battery Electric Vehicle (BEV) is supplied only by a battery. Both types might interface electrically with the grid, which allows them to charge and (when technically possible) discharge their stored energy[9]. In this paper, we use ‘EV’ to refer to both types (i.e., PHEV and BEV). Over 90% of homes, workplaces, and public places might provide chargers for EVs, which means they might be connected to the grid most of the time[10][11][12][13]. Furthermore, a statistical analysis reported in Bhattarai et al. [14] shows that the majority of vehicles (around 60%) are driven by their owners from the home to the workplace between 6:00 and 9:00 a.m. At the same time, the majority also drive back home from 2:00 to 5:00 p.m. The final result of the statistical analysis shows that 94% of EVs are available for charging (similarly discharging as well when technically supported) throughout the day. The high level of availability of EVs is also confirmed by other papers. For example, [15] mentions that the probability that an EV is parked anywhere during daylight time is over 90%, while the probability that it is parked at home most of the day is over 50%. Compared to vehicles with ICEs, EVs significantly reduce CO2 emissions and other harmful gases[16][17][18]. Furthermore, they reduce noise levels and allow for better urban air quality[17]. Despite this,[12][17][19] demonstrate that EVs charged from conventional power plants such as coal-based plants produce more CO2 and harmful gases compared to normal ICE vehicles. Hence, for EVs penetration to benefit the environment and reduce harmful gas emissions, it should be accompanied by the integration of RES, hydropower plants, and nuclear plants. An EV can have a unidirectional charger in which it absorbs energy from the PG without injecting energy[20] or a bidirectional charger through which it may absorb or inject energy from/to the PG[21]. Research demonstrates that the coordinated smart charging/discharging of EVs is much more efficient than uncoordinated charging [17][22], especially when advanced converters are used. The used optimization techniques reduce the power losses on the PG and reduce the operation cost of the whole system. In addition, aggregators such as Parking Lots (PLs), Charging Stations (CSs), and Power System Operators (PSOs), as well as individual EVs are benefiting from this coordination [20][21][23][24][25][26][27][28][29][30]. Coordinated charging/discharging minimizes the detrimental impact of EV on the PG[21][31][32], even with high penetration level[33]. By contrast, the uncoordinated charging may negatively affect the PG even with a small penetration level[34].
1.3. Contribution
Many review papers were done on the impact of the EVs integration on the PG [21][35][36]. Others focused on the charger power levels[36], the infrastructure for EVs [36], the unidirectional and bidirectional chargers [36], the optimal scheduling methods [35], and the power flow [21]. Many papers mentioned the charging strategies, but they are not detailed and lack important definitions and information [21][36]. There is a lack of relevant information in these review papers because (1) a complete list of different charging and discharging strategies of EVs does not exist; (2) the advantages and barriers of each strategy are not described completely, and (3) there are hundreds of different methods of charging and discharging, and most of them are not related to each other in a systematic and comprehensive review. In fact, even the latest review paper we are aware of was written by Solanke et al.[37]. The authors provided an excellent comprehensive review of the optimization objectives of charging strategies and challenges facing V2G implementation. However,[37] covers only five charging/discharging methods (compared to 14 as identified by our work). Filling a gap in the literature, this review paper contributes to categorize different charging and discharging strategies according to many criteria and presents the advantages and barriers of each strategy. The main contributions of this review are as follows:
-
Clearly and systematically classifies different charging and discharging strategies
-
Presents (in detail) the advantages and barriers as well as positive and negative impacts on power grids of the identified strategies
-
Defines new strategies that (up to the date of this review) were not mentioned in the literature
-
Rates the strategies based on detailed coverage of multiple aspects of interest
-
Comprehensively identifies the optimization constraints of charging/discharging strategies as covered in the literature
-
Provides recommendations on the suitability of each strategy for specific applications
2. Categorizing All Charging Strategies
After an extensive literature review on different charging and discharging strategies, we concluded that a detailed classification of charging strategies does not exist in the literature (to our best knowledge). Therefore, this paper categorizes all different charging methods into 14 main strategies according to many criteria, as described in the following subsections. For the sake of completion, we propose new strategies, which might be potential research topics in the future. The strategies are divided into two main groups: (A) Uncoordinated Strategies (Table 1) and (B) Coordinated Strategies (Tables 2 and 3). The mentioned strategies are compared in Tables 4–8 considering techno-economic aspects.
2.1. Uncoordinated Strategies
Uncoordinated Strategies (USTs) are defined as the “charging” or “charging and discharging” processes (also called modes) of a single or a fleet of EVs which occurs in an uncoordinated manner, without scheduling, without using optimization techniques, without coordinating between different EVs on the same transformer, and without following pricing mechanisms (as in Table 1). This group contains three different methods of charging and discharging and six main strategies, as depicted in Figure 1. The first method of charging is “Direct”, which means that when the EV is plugged in, the charging starts immediately and stops when the EV is charged to the desired State-of-Charge (SOC) level or disconnected. The second method of charging is “Delayed”, which means that when the EV is plugged in, the charging may be delayed to off-peak time. Such a delay reduces the total load congestion during on-peak periods. The third method of charging is “Random”. This method is similar to the “Direct” method, except for the difference that the plug-in time distribution of EVs on a bus is random.
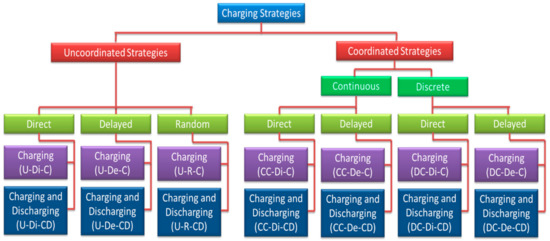
Figure 1. Coordinated and Uncoordinated Strategies.
Table 1. Definitions of Uncoordinated Charging Strategies of Electric Vehicles (EVs).
| Strategy | Definition and References that Discuss/Propose the Strategy | ||
|---|---|---|---|
| Item | Name and Abbreviation | ||
| 1. | Uncoordinated Direct Charging | U-Di-C | The charging mode of a single or a fleet of EVs that automatically charge when they are connected to a PG until they are charged to the desired SOC or disconnected[9][17][20][26][38][39][40]. |
| 2. | Uncoordinated Direct Charging and Discharging | U-Di-CD | SAS1. In addition, the discharging mode could be used to supply electricity to the load or the PG during the on-peak time. The discharging occurs in an uncoordinated manner (as defined in Section 2.1) and subject to the owner’s desire. The discharging power rate is not optimized or controlled. Therefore, it is not recommended to use it because it might discharge at an unwanted power rate. Therefore, it creates unnecessary demand reduction. This strategy has not been studied yet to the best of our knowledge. |
| 3. | Uncoordinated Delayed Charging and Discharging | U-De-C | The charging mode of a single or a fleet of EVs in which the charging is delayed to a certain period (usually to the off-peak time) in order to reduce the power congestion during the on-peak time. Since it uses uncoordinated charging (as defined in Section 2.1), the delay of charging may create another peak load during the off-peak time (a phenomenon known as “rebound peak”[41]). Therefore, it could have a negative impact on the PG. This strategy was studied by[42][43]. |
| 4. | Uncoordinated Delayed Charging | U-De-CD | SAS3. In addition, the characteristic of the discharging mode is similar to strategy 2 (U-Di-CD). This strategy has not been studied yet to the best of the authors’ knowledge. |
| 5. | Uncoordinated Random Charging | U-R-C | The charging mode of a fleet of EVs distributed randomly during a certain period. This type of charging is similar to strategy 3 (U-De-C), but the difference is that in the latter, the EVs are not distributed randomly during a certain period of time. Some papers studied this strategy, such as [33][44][45]. Paper [38] studied a similar type of charging called “random schedule”, in which the distribution of charging EVs is done randomly during a certain period |
| 6. | Uncoordinated Random Charging and Discharging | U-R-CD | SAS5. The characteristic of the discharging mode is similar to strategies 2 and 4 (U-Di-CD, U-De-CD). This strategy has not been studied yet to the best of the authors’ knowledge. |
A graphical illustration of all uncoordinated strategies is shown in Figure 2.
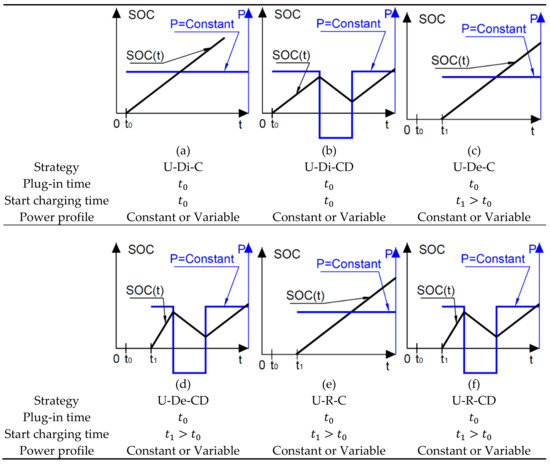
Figure 2. Illustration SOC and Discharge Power for Uncoordinated Strategies.
2.2. Coordinated Strategies
Coordinated Strategies (CSTs) are defined as the “charging” or “charging and discharging” modes of a single or a fleet of EVs which occur in a coordinated manner, with scheduling, with using optimization techniques, with or without coordination between different EVs on the same transformer, and with following the pricing mechanisms[46][47][48][49][50][51][52][53]. This group contains two major branches: “Continuous” and “Discrete” Charging Strategies as in Table 2 and Table 3, respectively. Each major branch contains two different methods of charging and discharging, which are “Direct” and “Delayed” similar to the UST mentioned in Section 2.1. In total, it contains eight different strategies, as depicted in Figure 1. The Continuous Charging Strategies are defined as the “Charging” or “Charging and Discharging” of EVs in a continuous manner during a certain period (e.g., ≥1 h) without dividing the charging time into separate intervals. The “Continuous” is used at home, PL, and a CS. The Discrete Charging Strategies are defined as the “Charging” or “Charging and Discharging” of EVs in a discrete manner during a certain period (e.g., ≥1 h). The total time of charging is divided into several intervals (e.g., 5 min each interval). The charging may occur during certain intervals, while other intervals could be used for other EVs. It is used only in PLs and not for a single EV.
The CST is widely studied in recent years. They are regarded as the best strategies that could be implemented to EVs. The charging and discharging modes are controlled, coordinated, and optimized in such a way that the negative impacts of the EVs’ penetration become positive impacts on the PG. Most of these studies have concentrated on the Grid-to-Vehicle (G2V) concept, in which the charging mode is only considered. Others have concentrated on both concepts V2G and G2V in which a bidirectional power flow is implemented (i.e., it is possible to charge the EV during G2V mode or discharge it during V2G mode). The main goal of these strategies is to reduce the power losses in the PG, reduce the total operation cost, reduce the peak load, etc. There are also other concepts such as Vehicle-to-Vehicle (V2V), Vehicle-to-Home (V2H), or Home-to-Vehicle (H2V)[54], etc. All these concepts have similar goals to the ones of Vehicle-to-Grid (V2G) and G2V modes.
Table 2. Definitions of Continuous Coordinated Charging Strategies of EV.
| Strategy | Definition and References that Discuss/Propose the Strategy | ||
|---|---|---|---|
| Item | Name and Abbreviation | ||
| 7. | Continuous Coordinated Direct Charging | CC-Di-C | The charging mode of a single or fleet of EVs, which automatically charge when they are connected to the PG until they are charged to the desired SOC or disconnected. It uses an optimization technique that charges EVs continuously during a certain period of time without being interrupted. Furthermore, the charging mode is coordinated in a way to avoid charging during the on-peak time and fill valleys during the off-peak time [26,38,44,46]. This strategy also includes fuzzy coordinated Direct Charging in which it uses the Fuzzy reasoning [39] as well as real-time coordination [44]. |
| 8. | Continuous Coordinated Direct Charging and Discharging | CC-Di-CD | SAS7. Additionally, the discharging mode could be used to supply electricity to the load or the PG during the on-peak time. The discharging occurs in a coordinated manner (as defined in Section 2.2) during the on-peak time and when the electricity price is very high [47,48]. The discharging power rate is optimized and controlled. Therefore, it is highly recommended to use this strategy because of its many advantages, such as reducing the peak load, minimizing the total operating cost, etc. This strategy includes the fuzzy coordinated direct charging and discharging (it has not been studied yet, and it is highly recommended). |
| 9. | Continuous Coordinated Delayed Charging | CC-De-C | The charging mode of a single or fleet of EVs in which the charging is delayed to the off-peak time [20,40,49,50,51]. It uses an optimization technique to charge EVs continuously during a certain period without being interrupted. There are reasons to use this strategy such as (1) it reduces the congestion on the network; (2) it charges when the electricity price is low [49]; and (3) it fills valleys [49,51]. |
| 10. | Continuous Coordinated Delayed Charging and Discharging | CC-De-CD | SAS9. Furthermore, the characteristic of the discharging mode is similar to strategy 8 (CC-Di-CD). Ref. [40] used this strategy in which the discharging occurs when the load overpasses the limit on the transformer. |
A graphical illustration of all uncoordinated strategies is shown in Figure 3.
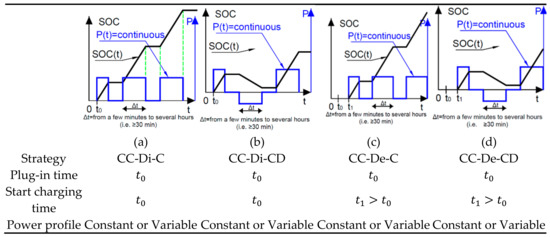
Figure 3. Illustration SOC and Discharge Power for Continuous Coordinated Strategies.
Table 3. Definitions of Discrete Coordinated Charging Strategies of EV.
| Strategy | Definition and References that Discuss/Propose the Strategy | ||
|---|---|---|---|
| Item | Name and Abbreviation | ||
| 11. | Discrete Coordinated Direct Charging | DC-Di-C | The charging mode of a fleet of EVs in which they automatically charge when they are connected to the PG until they are charged to the desired SOC or disconnected. It uses optimization techniques, and it charges EVs within discrete intervals for a period, as defined in Section 2.2. The width of the interval depends on the engineer who designs the optimization algorithm. It could range from several seconds to several minutes. The intervals could be equally or unequally distributed. For each interval, the charging occurs for a limited number of EVs. The same charged EVs could not be charged in the next interval. The charging partition of EVs depends on many factors such as their numbers, their initial and the desired final SOC, their priority of charging, and their arrival and departure time. The purpose of this method is to extend the charging mode to a more extended period to reduce the impact of EVs’ high penetration on the grid [52,53]. |
| 12. | Discrete Coordinated Direct Charging and Discharging | DC-Di-CD | SAS11. In addition, the characteristic of the discharging mode is similar to strategy 8 (CC-Di-CD), but the difference is that the charging time is decomposed of different intervals instead of one interval. Therefore, the peak demand is reduced and prolonged to a wider period. This strategy has not been studied yet to the best of the authors’ knowledge. It is highly recommended to use this strategy for its many advantages. |
| 13. | Discrete Coordinated Delayed Charging | DC-De-C | SAS9. However, the difference is that discrete charging is used instead of continuous charging. The charging process is delayed to a longer period in order to reduce the detrimental impact on the PG. This strategy has not yet been used to the best of the authors’ knowledge. |
| 14. | Discrete Coordinated Delayed Charging and Discharging | DC-De-CD | SAS13 and SAS10. However, the difference is that discrete charging is used instead of continuous charging. This strategy has not yet been used to the best of the authors’ knowledge. |
A graphical illustration of all uncoordinated strategies is shown in Figure 4.
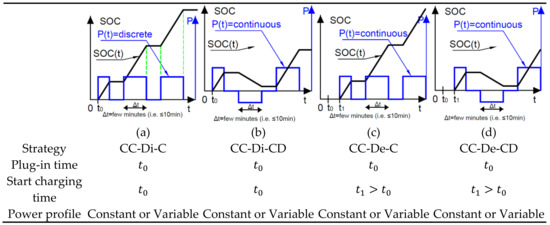
Figure 4. Illustration SOC and Discharge Power for Discrete Coordinated Strategies.
References
- Global, B. BP Statistical Review of World Energy, 68th ed.; BP. London, England. 2019.
- Outlook, B.E. BP Energy Outlook 2035. In BP Energy Outlook; BP. London, England. 2015.
- Energy Agency. Key World Energy Statistics 2019. Available online: https://webstore.iea.org/key-world-energy-statistics-2019 (accessed on January 5, 2020).
- IEA. World Energy Outlook 2019. Paris, France. 2019. Available online: https://www.iea.org/reports/world-energy-outlook-2019 (accessed on December 20, 2019).
- Trigg, T.; Telleen P.; Boyd, R.; Cuenot, F. D’Ambrosio, D.; Gaghen, R.; Gagné, J.F.; Hardcastle, A.; Houssin, D.; Jones, A.R. Global EV outlook: Understanding the electric vehicle landscape to 2020. Int. Energy Agency 2013, 1, 1–40.
- Ayre, J. Electric car demand growing, global market hits 740,000 units. Clean Technica. 2015, 23, 2019. Available online: https://www.bcsea.org/electric-car-demand-growing-global-market-hits-740000-units (accessed on December 15, 2019).
- Sharma, A.; Shih, S.; Srinivasan, D. A smart scheduling strategy for charging and discharging of electric vehicles. In Pro-ceedings of the 2015 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA), IEEE, Bangkok, Thailand, 3-6 November 2015; pp. 1–6.
- Sovacool, B.K.; Hirsh, R.F. Beyond batteries: An examination of the benefits and barriers to plug-in hybrid electric vehicles (PHEVs) and a vehicle-to-grid (V2G) transition. Energy Policy 2009, 37, 1095–1103.
- Sundstrom, O.; Binding, C. Flexible charging optimization for electric vehicles considering distribution grid constraints. IEEE Trans. Smart Grid 2011, 3, 26–37.
- Kempton, W.; Letendre, S.E. Electric vehicles as a new power source for electric utilities. Transp. Res. Part D Transp. Environ. 1997, 2, 157–175.
- Tomic, J.; Kempton, W. Using fleets of electric-drive vehicles for grid support. J. Power Sources 2007, 168, 459–468.
- Saber, A.Y.; Venayagamoorthy, G.K. Intelligent unit commitment with vehicle-to-grid—A cost-emission optimization. J. Power Sources 2010, 195, 898–911.
- Kempton, W.; Tomic, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279.
- Bhattarai, B.P.; Myers, K.S.; Bak-Jensen, B.; Paudyal, S. Multi-time scale control of demand flexibility in smart distribution networks. Energies 2017, 10, 37.
- Khan, S.U.; Mehmood, K.K.; Haider, Z.M.; Bukhari, S.B.A.; Lee, S.-J.; Rafique, M.K.; Kim, C.-H. Energy management scheme for an EV smart charger V2G/G2V application with an EV power allocation technique and voltage regulation. Appl. Sci. 2018, 8, 648.
- Jourabchi, M. Impact of Plug-in Hybrid Vehicles on Northwest Power System: A Preliminary Assessment; Northwest Power and Conservation Council, Portland, Oregon 97204, USA : 2008.
- Sioshansi, R.; Fagiani, R.; Marano, V. Cost and emissions impacts of plug-in hybrid vehicles on the Ohio power system. Energy Policy 2010, 38, 6703–6712.
- Sioshansi, R.; Denholm, P. Emissions impacts and benefits of plug-in hybrid electric vehicles and vehicle-to-grid services. Environ. Sci. Technol. 2009, 43, 1199–1204.
- Jansen, K.H.; Brown, T.M.; Samuelsen, G.S. Emissions impacts of plug-in hybrid electric vehicle deployment on the US western grid. J. Power Sources 2010, 195, 5409–5416.
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribu-tion grid. IEEE Trans. Power Syst. 2009, 25, 371–380.
- Yilmaz, M.; Krein, P.T. Review of the impact of vehicle-to-grid technologies on distribution systems and utility interfaces. IEEE Trans. Power Electron. 2012, 28, 5673–5689.
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2010, 26, 802–810.
- Aravinthan, V.; Jewell, W. Controlled electric vehicle charging for mitigating impacts on distribution assets. IEEE Trans. Smart Grid 2015, 6, 999–1009.
- Ng, K.-H.; Sheble, G.B. Direct load control-A profit-based load management using linear programming. IEEE Trans. Power Syst. 1998, 13, 688–694.
- Sortomme, E.; El-Sharkawi, M.A. Optimal charging strategies for unidirectional vehicle-to-grid. IEEE Trans. Smart Grid 2010, 2, 131–138.
- Mets, K.; D’hulst, R.; Develder, C. Comparison of intelligent charging algorithms for electric vehicles to reduce peak load and demand variability in a distribution grid. J. Commun. Netw. 2012, 14, 672–681.
- Lee, T.-F.; Cho, M.-Y.; Hsiao, Y.-C.; Chao, P.-J.; Fang, F.-M. Optimization and implementation of a load control scheduler using relaxed dynamic programming for large air conditioner loads. IEEE Trans. Power Syst. 2008, 23, 691–702.
- Hsu, Y.-Y.; Su, C.-C. Dispatch of direct load control using dynamic programming. IEEE Trans. Power Syst. 1991, 6, 1056–1061.
- Han, S.; Han, S.; Sezaki, K. Development of an optimal vehicle-to-grid aggregator for frequency regulation. IEEE Trans. Smart Grid 2010, 1, 65–72.
- El-Bayeh, C.Z.; Mougharbel, I.; Saad, M.; Chandra, A.; Lefebvre, S.; Asber, D.; Lenoir L. A novel approach for sizing electric vehicles Parking Lot located at any bus on a network. 2016 IEEE Power and Energy Society General Meeting (PESGM). July 17-21, 2016. Boston, USA: (2016).
- EPRI. Environmental Assessment of Plug-In Hybrid Electric Vehicles. In Volume 1: Nationwide Greenhouse Gas Emissions; Final Report; Electric Power Research Institute (EPRI). 3420 Hillview Avenue, Palo Alto, California, USA: (2007).
- Samaras, C.; Meisterling, K. Life Cycle Assessment of Greenhouse Gas Emissions from Plug-In Hybrid Vehicles: Implications for Poli-cy; Environmental Science & Technology, 42 (9). American Chemical Society. 2008. pp. 3170-3176.
- Masoum, M.A.; Moses, P.S.; Hajforoosh, S. Distribution transformer stress in smart grid with coordinated charging of plug-in electric vehicles. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA. January 16-20, 2012; pp. 1–8. IEEE.
- Schneider, K.; Gerkensmeyer, C.; Kintner-Meyer, M.; Fletcher, R. Impact assessment of plug-in hybrid vehicles on pacific northwest distribution systems. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century. Pittsburgh, PA, USA. IEEE. 20-24 July 2008; pp. 1–6.
- Yang, Z.; Li, K.; Foley, A.; Zhang, C. Optimal scheduling methods to integrate plug-in electric vehicles with the power sys-tem: A review. IFAC Proc. The International Federation of Automatic Control. Cape Town, South Africa. August 24-29, 2014, 47 (3), 8594–8603.
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2012, 28, 2151–2169.
- Solanke, T.U.; Ramachandaramurthy, V.K.; Yonga, J.Y.; Pasupuleti, J.; Kasinathan, P.; Rajagopalan, A. A review of strategic charging–discharging control of grid-connected electric vehicles. J. Energy Storage 2020, 28, 101193.
- Hua, L.; Wang, J.; Zhou, C. Adaptive electric vehicle charging coordination on distribution network. IEEE Trans. Smart Grid 2014, 5, 2666–2675
- Masoum, A.S.; Deilami, S.; Abu-Siada, A.; Masoum, M.A.S. Fuzzy approach for online coordination of plug-in electric vehi-cle charging in smart grid. IEEE Trans. Sustain. Energy 2014, 6, 1112–1121.
- O’Connell, A.; Flynn, D.; Richardson, P.; Keane, A. Controlled charging of electric vehicles in residential distribution net-works. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), IEEE; Berlin, Germany; 14-17 October 2012; 1–7.
- Aldaoudeyeh, A.-M.I.; Kavasseri, R.G.; Lima, I.T. Characterization of Forward Electricity Market Price Variations and Price-Responsive Demands. In Proceedings of the 2017 Ninth Annual IEEE Green Technologies Conference (GreenTech), IEEE; Denver, CO, USA; 29-31 March 2017; 211–218.
- Clement, K.; Haesen, E.; Driesen, J. Coordinated charging of multiple plug-in hybrid electric vehicles in residential distri-bution grids. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, IEEE; Seattle, WA, USA; 15-18 March 2009; pp. 1–7.
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of vehicle-to-grid on the distribution grid. Electr. Power Syst. Res. 2011, 81, 185–192.
- Deilami, S.; Masoum, A.S.; Moses, P.S.; Masoum, M.A.S. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid 2011, 2, 456–467.
- Moses, P.S.; Masoum, M.A.; Hajforoosh, S. Overloading of distribution transformers in smart grid due to uncoordinated charging of plug-In electric vehicles. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), IEEE; Washington, DC, USA; 16-20 January 2012; pp. 1–6.
- Cao, Y.; Tang, S.; Li, C.; Zhang, P.; Tan, Y.; Zhang, Z.; Li, J. An optimized EV charging model considering TOU price and SOC curve. IEEE Trans. Smart Grid 2011, 3, 388–393.
- Khodayar, M.E.; Wu, L.; Shahidehpour, M. Hourly coordination of electric vehicle operation and volatile wind power gen-eration in SCUC. IEEE Trans. Smart Grid 2012, 3, 1271–1279.
- He, Y.; Venkatesh, B.; Guan, L. Optimal scheduling for charging and discharging of electric vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105.
- Ma, Z.; Callaway, D.; Hiskens, I. Decentralized charging control for large populations of plug-in electric vehicles: Applica-tion of the Nash certainty equivalence principle. In Proceedings of the 2010 IEEE International Conference on Control Ap-plications, IEEE, Yokohama, Japan; 8-10 September 2010; pp. 191–195.
- Heydt, G.T. The impact of electric vehicle deployment on load management straregies. IEEE Trans. Power Appar. Syst. 1983, 5, 1253–1259.
- Ahn, C.; Li, C.-T.; Peng, H. Optimal decentralized charging control algorithm for electrified vehicles connected to smart grid. J. Power Sources 2011, 196, 10369–10379.
- Xu, G. Optimal Scheduling for Charging Electric Vehicles with Fixed Setup Costs. Master of Science Thesis, Department of Industrial Engineering, University of Louisville, Louisville, Kentucky, USA, 2013.
- Nguyen, V.-L.; Tran-Quoc, T.; Bacha, S.; Nguyen, B. Charging strategies to minimize the peak load for an electric vehicle fleet. In Proceedings of the IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Dallas, TX, USA; 29 October-1 November 2014; pp. 3522–3528.
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and challenges of vehicle-to-home, vehicle-to-vehicle, and vehicle-to-grid technologies. IEEE 2013, 101, 2409–2427.

