Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Claude El-Bayeh and Version 1 by Claude El-Bayeh.
Plug-in Electric Vehicles refer to vehicles that are powered by electricity from off-vehicle sources or can be self-contained with a battery, solar panels, fuel cells, or an electric generator to convert fuel to electricity. EVs include, but are not limited to, road and rail vehicles, surface and underwater vessels, electric aircraft, and electric spacecraft.
The literature covering Plug-in Electric Vehicles (EVs) contains many charging/discharging strategies. However, none of the review papers covers such strategies in a complete fashion where all patterns of EVs charging/discharging are identified.
- Electric vehicles
- charging strategies
- optimization
Review1. Introduction
1.1. Motivation and Background
The world is encountering a reduction in fossil fuel reserves for the next few decades. For example, the worldwide production of oil is expected to expire in 53.3 years, that of natural gas is expected to expire in 55.1 years, and that of coal is expected to expire in 113 years [1]. The energy consumption is increasing each year [2], and the CO2 emission is also increasing [2]. It is estimated that 32.2 Gt of CO2 are produced in 2013 compared to 15.5 Gt in 1973 [3]. The global temperature of the Earth is increasing each year, and it is predicted to rise by about 3.6 °C by 2040 compared to 2014 [4]. The fuel oil consumption in the transportation sector overpassed 63.8% in 2013 with respect to the total consumption in the world, according to the International Energy Agency (IEA) [3]. The natural gas consumed by the transportation sector overpassed 6.9% in 2013 [3]. Meanwhile, the electricity used for the transportation sector did not reach 1.5% in the whole world, which is negligible compared to the oil consumed in the sector [3]. All these reductions in the worldwide reserves have encouraged researchers, organizations, and governments to shift their source of energy to Renewable Energy Source (RESs) and to introduce Electric Vehicles (EVs), which use electric/hybrid motors as an alternative solution to the Internal Combustion Engine (ICE), which is used in most of the vehicles. The share of RESs in total power generation is expected to rise to 33% in 2040 [4]. The market production and demand for EVs are increasing every year. They reached 740,000 vehicles in 2014 [5], and it is expected to reach 20 million EVs in 2020 [6] (In fact, the number of customers who purchase EVs increases by 10% every year [7]). According to a study done by Electric Power Research Institute (EPRI), a PHEV sedan might cost annually $175 (assuming average residential price of 11.4 cents per kWh, all currencies are in USD in this paper). Assuming a gasoline price of $3 per gallon assumption and that a conventional car would travel the same distance, the EPRI concludes that the average American driver might save up to $600 annually by using a PHEV [8]. Thus, the utilization of EVs is economical. Other benefits also are obtained from EVs. Many studies have been done to integrate them into the Power Grid (PG) in an optimized fashion to benefit from their integration. In addition to the many advantages of EVs, they also have limitations. Thus, to reduce the negative impact on the network, it is crucial to choose an optimized charging strategy.
1.2. Literature Review
A Plug-in Hybrid Electric Vehicle (PHEV) consumes energy from two sources: the fossil fuel and a battery, while a Battery Electric Vehicle (BEV) is supplied only by a battery. Both types might interface electrically with the grid, which allows them to charge and (when technically possible) discharge their stored energy [9]. In this paper, we use ‘EV’ to refer to both types (i.e., PHEV and BEV). Over 90% of homes, workplaces, and public places might provide chargers for EVs, which means they might be connected to the grid most of the time [10,11,12,13]. Furthermore, a statistical analysis reported in Bhattarai et al. [14] shows that the majority of vehicles (around 60%) are driven by their owners from the home to the workplace between 6:00 and 9:00 a.m. At the same time, the majority also drive back home from 2:00 to 5:00 p.m. The final result of the statistical analysis shows that 94% of EVs are available for charging (similarly discharging as well when technically supported) throughout the day. The high level of availability of EVs is also confirmed by other papers. For example, [15] mentions that the probability that an EV is parked anywhere during daylight time is over 90%, while the probability that it is parked at home most of the day is over 50%. Compared to vehicles with ICEs, EVs significantly reduce CO2 emissions and other harmful gases [16,17,18]. Furthermore, they reduce noise levels and allow for better urban air quality [17]. Despite this, [12,17,19] demonstrate that EVs charged from conventional power plants such as coal-based plants produce more CO2 and harmful gases compared to normal ICE vehicles. Hence, for EVs penetration to benefit the environment and reduce harmful gas emissions, it should be accompanied by the integration of RES, hydropower plants, and nuclear plants. An EV can have a unidirectional charger in which it absorbs energy from the PG without injecting energy [20] or a bidirectional charger through which it may absorb or inject energy from/to the PG [21]. Research demonstrates that the coordinated smart charging/discharging of EVs is much more efficient than uncoordinated charging [17,22], especially when advanced converters are used. The used optimization techniques reduce the power losses on the PG and reduce the operation cost of the whole system. In addition, aggregators such as Parking Lots (PLs), Charging Stations (CSs), and Power System Operators (PSOs), as well as individual EVs are benefiting from this coordination [20,21,23,24,25,26,27,28,29,30]. Coordinated charging/discharging minimizes the detrimental impact of EV on the PG [21,31,32], even with high penetration level [33]. By contrast, the uncoordinated charging may negatively affect the PG even with a small penetration level [34].
1.3. Contribution
Many review papers were done on the impact of the EVs integration on the PG [21,35,36]. Others focused on the charger power levels [36], the infrastructure for EVs [36], the unidirectional and bidirectional chargers [36], the optimal scheduling methods [35], and the power flow [21]. Many papers mentioned the charging strategies, but they are not detailed and lack important definitions and information [21,36]. There is a lack of relevant information in these review papers because (1) a complete list of different charging and discharging strategies of EVs does not exist; (2) the advantages and barriers of each strategy are not described completely, and (3) there are hundreds of different methods of charging and discharging, and most of them are not related to each other in a systematic and comprehensive review. In fact, even the latest review paper we are aware of was written by Solanke et al. [37]. The authors provided an excellent comprehensive review of the optimization objectives of charging strategies and challenges facing V2G implementation. However, [37] covers only five charging/discharging methods (compared to 14 as identified by our work). Filling a gap in the literature, this review paper contributes to categorize different charging and discharging strategies according to many criteria and presents the advantages and barriers of each strategy. The main contributions of this review are as follows:
-
Clearly and systematically classifies different charging and discharging strategies
-
Presents (in detail) the advantages and barriers as well as positive and negative impacts on power grids of the identified strategies
-
Defines new strategies that (up to the date of this review) were not mentioned in the literature
-
Rates the strategies based on detailed coverage of multiple aspects of interest
-
Comprehensively identifies the optimization constraints of charging/discharging strategies as covered in the literature
-
Provides recommendations on the suitability of each strategy for specific applications
2. Categorizing All Charging Strategies
After an extensive literature review on different charging and discharging strategies, we concluded that a detailed classification of charging strategies does not exist in the literature (to our best knowledge). Therefore, this paper categorizes all different charging methods into 14 main strategies according to many criteria, as described in the following subsections. For the sake of completion, we propose new strategies, which might be potential research topics in the future. The strategies are divided into two main groups: (A) Uncoordinated Strategies (Table 1) and (B) Coordinated Strategies (Tables 2 and 3). The mentioned strategies are compared in Tables 4–8 considering techno-economic aspects.
2.1. Uncoordinated Strategies
Uncoordinated Strategies (USTs) are defined as the “charging” or “charging and discharging” processes (also called modes) of a single or a fleet of EVs which occurs in an uncoordinated manner, without scheduling, without using optimization techniques, without coordinating between different EVs on the same transformer, and without following pricing mechanisms (as in Table 1). This group contains three different methods of charging and discharging and six main strategies, as depicted in Figure 1. The first method of charging is “Direct”, which means that when the EV is plugged in, the charging starts immediately and stops when the EV is charged to the desired State-of-Charge (SOC) level or disconnected. The second method of charging is “Delayed”, which means that when the EV is plugged in, the charging may be delayed to off-peak time. Such a delay reduces the total load congestion during on-peak periods. The third method of charging is “Random”. This method is similar to the “Direct” method, except for the difference that the plug-in time distribution of EVs on a bus is random.
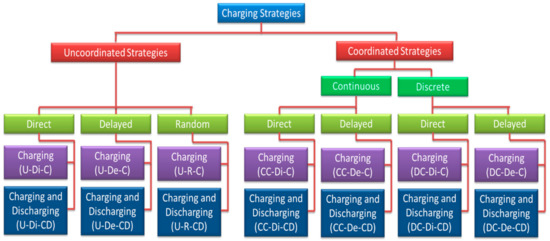

Figure 1. Coordinated and Uncoordinated Strategies.
Table 1. Definitions of Uncoordinated Charging Strategies of Electric Vehicles (EVs).
A graphical illustration of all uncoordinated strategies is shown in Figure 2.
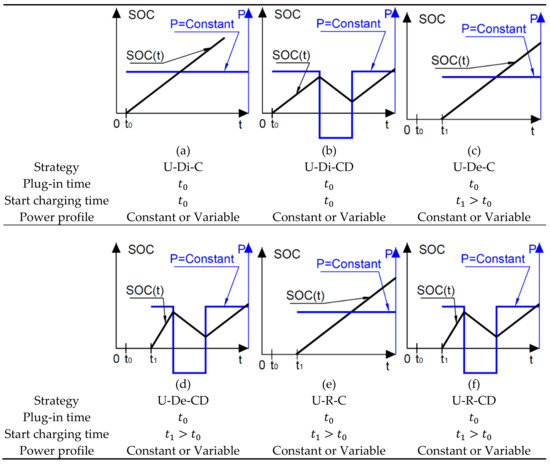
Figure 2. Illustration SOC and Discharge Power for Uncoordinated Strategies.
2.2. Coordinated Strategies
Coordinated Strategies (CSTs) are defined as the “charging” or “charging and discharging” modes of a single or a fleet of EVs which occur in a coordinated manner, with scheduling, with using optimization techniques, with or without coordination between different EVs on the same transformer, and with following the pricing mechanisms [46,47,48,49,50,51,52,53]. This group contains two major branches: “Continuous” and “Discrete” Charging Strategies as in Table 2 and Table 3, respectively. Each major branch contains two different methods of charging and discharging, which are “Direct” and “Delayed” similar to the UST mentioned in Section 2.1. In total, it contains eight different strategies, as depicted in Figure 1. The Continuous Charging Strategies are defined as the “Charging” or “Charging and Discharging” of EVs in a continuous manner during a certain period (e.g., ≥1 h) without dividing the charging time into separate intervals. The “Continuous” is used at home, PL, and a CS. The Discrete Charging Strategies are defined as the “Charging” or “Charging and Discharging” of EVs in a discrete manner during a certain period (e.g., ≥1 h). The total time of charging is divided into several intervals (e.g., 5 min each interval). The charging may occur during certain intervals, while other intervals could be used for other EVs. It is used only in PLs and not for a single EV.
The CST is widely studied in recent years. They are regarded as the best strategies that could be implemented to EVs. The charging and discharging modes are controlled, coordinated, and optimized in such a way that the negative impacts of the EVs’ penetration become positive impacts on the PG. Most of these studies have concentrated on the Grid-to-Vehicle (G2V) concept, in which the charging mode is only considered. Others have concentrated on both concepts V2G and G2V in which a bidirectional power flow is implemented (i.e., it is possible to charge the EV during G2V mode or discharge it during V2G mode). The main goal of these strategies is to reduce the power losses in the PG, reduce the total operation cost, reduce the peak load, etc. There are also other concepts such as Vehicle-to-Vehicle (V2V) [54], Vehicle-to-Home (V2H), or Home-to-Vehicle (H2V) [54], etc. All these concepts have similar goals to the ones of Vehicle-to-Grid (V2G) and G2V modes.
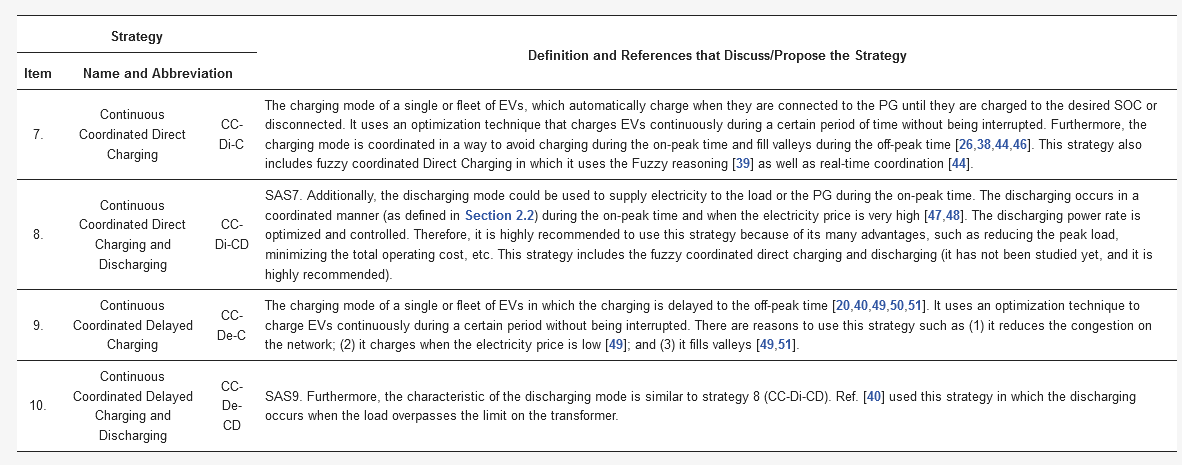
Table 2. Definitions of Continuous Coordinated Charging Strategies of EV.
A graphical illustration of all uncoordinated strategies is shown in Figure 3.
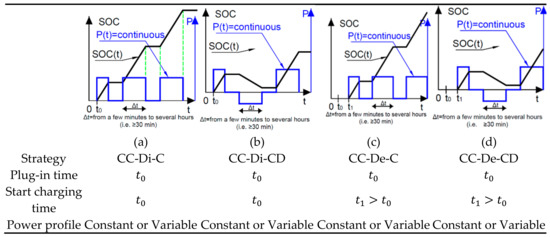
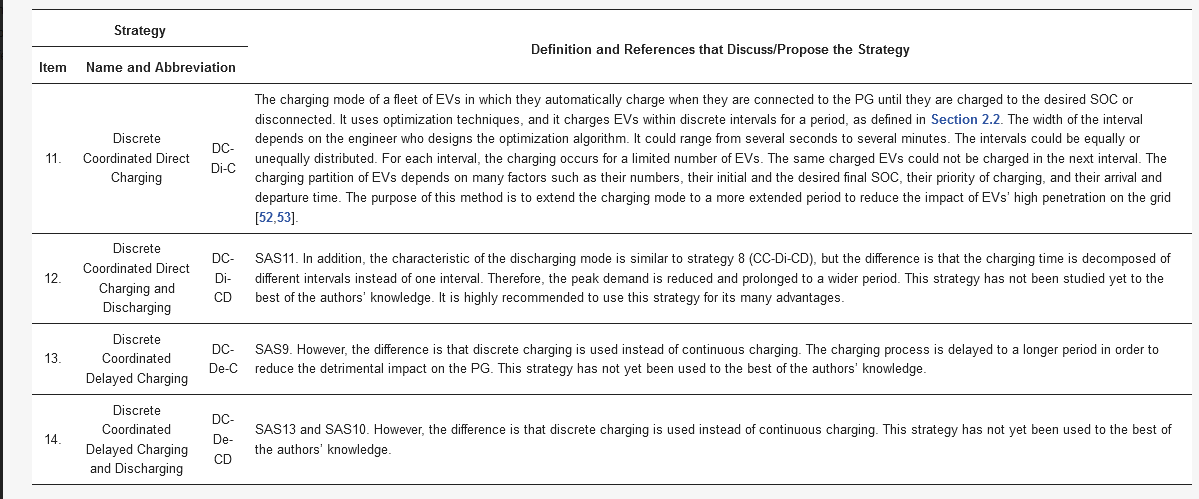
Figure 3. Illustration SOC and Discharge Power for Continuous Coordinated Strategies.
Table 3. Definitions of Discrete Coordinated Charging Strategies of EV.
A graphical illustration of all uncoordinated strategies is shown in Figure 4.
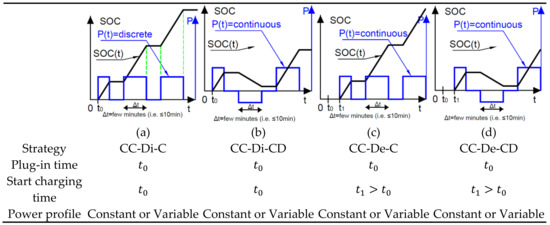
Figure 4. Illustration SOC and Discharge Power for Discrete Coordinated Strategies.