Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Hamid Behnam | -- | 2593 | 2024-03-11 18:02:04 | | | |
| 2 | Sirius Huang | Meta information modification | 2593 | 2024-03-13 02:24:22 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Vafaeezadeh, M.; Behnam, H.; Gifani, P. Ultrasound Image Analysis with Vision Transformers. Encyclopedia. Available online: https://encyclopedia.pub/entry/56124 (accessed on 26 July 2026).
Vafaeezadeh M, Behnam H, Gifani P. Ultrasound Image Analysis with Vision Transformers. Encyclopedia. Available at: https://encyclopedia.pub/entry/56124. Accessed July 26, 2026.
Vafaeezadeh, Majid, Hamid Behnam, Parisa Gifani. "Ultrasound Image Analysis with Vision Transformers" Encyclopedia, https://encyclopedia.pub/entry/56124 (accessed July 26, 2026).
Vafaeezadeh, M., Behnam, H., & Gifani, P. (2024, March 11). Ultrasound Image Analysis with Vision Transformers. In Encyclopedia. https://encyclopedia.pub/entry/56124
Vafaeezadeh, Majid, et al. "Ultrasound Image Analysis with Vision Transformers." Encyclopedia. Web. 11 March, 2024.
Copy Citation
Ultrasound (US) has become a widely used imaging modality in clinical practice, characterized by its rapidly evolving technology, advantages, and unique challenges, such as a low imaging quality and high variability. There is a need to develop advanced automatic US image analysis methods to enhance its diagnostic accuracy and objectivity. Vision transformers, a recent innovation in machine learning, have demonstrated significant potential in various research fields, including general image analysis and computer vision, due to their capacity to process large datasets and learn complex patterns. Their suitability for automatic US image analysis tasks, such as classification, detection, and segmentation, has been recognized.
transformer
ultrasound (US)
deep learning
convolutional neural network (CNN)
vision transformer (ViT)
swin transformer
1. Introduction
Ultrasound (US) is a versatile imaging technique that has become a fundamental resource in medical diagnosis and screening. Its wide acceptance and use by both physicians and radiologists underscore its importance and reliability. US is widely utilized due to its safety, affordability, non-invasive nature, real-time visualization capabilities, and the comfort it provides to those performing the procedure. It stands out among other imaging techniques like X-ray, MRI, and CT scans because of its several significant benefits, including its absence of ionizing radiation, portability, ease of access, and cost-efficiency [1]. US is applied in various medical fields, such as breast US, echocardiography, transrectal US, intravascular US (IVUS), prenatal diagnostic US, and abdominal US. It is particularly prevalent in obstetrics [2]. However, despite its numerous benefits, US also presents certain challenges. These include a lower image quality due to noise and artifacts, a high dependence on the operator or diagnostician’s experience, and significant variations in performance across different institutions and manufacturers’ US systems [3].
Artificial intelligence (AI) methods, particularly deep learning models, have brought about ultrasound imaging by automating image processing and enabling the automated diagnosis of disease and detection of abnormalities. Convolutional neural networks (CNNs) have played a vital role in this transformation, demonstrating improvements in various medical imaging modalities [4][5][6][7][8][9]. However, the limitations of CNNs in capturing long-range dependencies and contextual information led to the development of vision transformers (ViTs) [10] in image processing. The self-attention mechanism, a key part of the transformer, possesses the capability to establish relationships between sequence elements, thus facilitating the learning of long-range interactions.
Significant strides have been made in the vision community to integrate attention mechanisms into architectures inspired by CNNs. Recent research has shown that these transformer modules can potentially substitute standard convolutions in deep neural networks by working on a sequence of image patches culminating in the creation of ViTs.
In recent years, the integration of vision transformers into medical US analysis has encompassed a diverse range of methodological tasks. These tasks include traditional diagnostic functions like segmentation, classification, biometric measurements, detection, quality assessment, and registration, as well as innovative applications like image-guided interventions and therapy.
Notably, segmentation, detection, and classification stand out as the fundamental tasks, with widespread utilization across various anatomical structures in medical US analysis. The anatomical structures covered here include the heart [11], prostate [12], liver [13], breast [14], brain [15], lymph node [16], lung [17], pancreatic [18], carotid [19], thyroid [11], intravascular [20], fetus [21], urinary bladder [22], gallbladder, and other structures [23].
2. Fundamentals of Transformers
Transformers have advanced the field of Natural Language Processing (NLP) by providing a fundamental framework for processing and understanding language. Originally introduced by Vaswani et al. in 2017 [24], transformers have since become a cornerstone in NLP, particularly with the development of models such as BERT, GPT-3, and T5.
Fundamentally, transformers represent a kind of neural network architecture that does not rely on convolutions. They excel at identifying long-range dependencies and relationships in sequential data, which makes them especially effective for tasks related to language. The groundbreaking aspect of transformers is their attention mechanism, which empowers them to assign weights to the significance of various words in a sentence. This capability allows them to process and comprehend context more efficiently than earlier NLP models.
In addition to their significant impact on NLP, transformers have also shown promise in the field of computer vision. Vision transformers (ViTs) have emerged as a novel approach to image recognition tasks, challenging the traditional CNN architectures.
By applying the self-attention mechanism to image patches, vision transformers can effectively capture global dependencies in images, enabling them to understand the context and relationships between different parts of an image. This has led to impressive results in tasks such as image classification, object detection, and image segmentation.
The introduction of vision transformers has also opened up opportunities for cross-modal learning, where transformers can be applied to tasks that involve both text and images, such as image captioning and visual question answering. This demonstrates the versatility of transformers in handling multimodal data and their potential to drive innovation at the intersection of NLP and computer vision.
Overall, the application of transformers in computer vision showcases their adaptability and potential to revolutionize not only NLP, but also other domains of artificial intelligence, paving the way for new advancements in multimodal learning and our understanding of complex data.
2.1. Self-Attention
In transformers, self-attention is an element of the attention mechanism that allows the model to focus on various segments of the input sequence and identify dependencies among them [24]. This process involves converting the input sequence into three vectors: queries, keys, and values. The queries are employed to extract pertinent data from the keys, while the values are utilized to generate the output. The attention weights are determined based on the correlation between the queries and keys. The final output is produced by summing the weighted values.
This mechanism is especially potent in detecting long-term dependencies within the input sequence, thereby making it a valuable instrument for natural language processing and similar sequence-based tasks.
To elaborate, before the input sentence is fed into the self-attention block, it is first converted into an embedding vector. This process is known as “word embedding” or “sentence embedding”, and it forms the basis of many Natural Language Processing (NLP) tasks. After the embedding vector, the positional information of each word is also included because the position can alter the meaning of the word or sentence. This is performed to allow the model to track the position of each vector or word. Once the vectors are prepared, the next step is to calculate the similarity between any two vectors. The dot product is commonly used for this purpose due to its computational efficiency and space optimization. The dot product provides scalar results, which are suitable for our needs. After obtaining the similarity scores, the next step involves normalizing and applying the softmax function to obtain the attention weights. These weights are then multiplied with the original input vector to adjust the values according to the weights received from the softmax function.
2.2. Multi-Head Self-Attention
Multi-head self-attention is a strategy used in transformers to boost the model’s capacity to grasp a variety of relationships and dependencies within the input sequence [24]. This methodology involves executing self-attention multiple times concurrently, each time with different sets of learned queries, keys, and values. Each set originates from a linear projection of the initial input, offering multiple unique viewpoints on the input sequence (Figure 1).
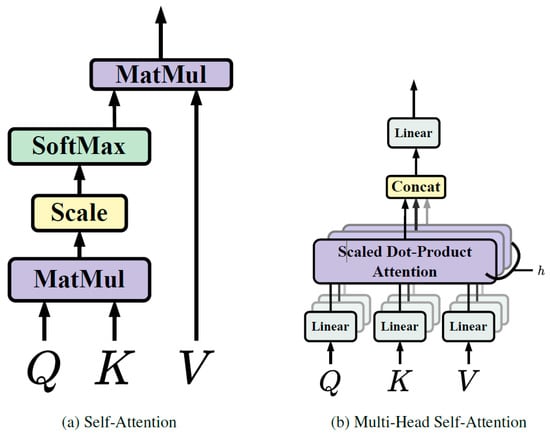
Figure 1. Self-attention and multi-head self-attention [24].
Utilizing multiple attention heads allows the model to pay attention to different portions of the input sequence and collect various types of information simultaneously. Once the self-attention process is independently carried out for each head, the outcomes are amalgamated and subjected to a linear transformation to yield the final output. This methodology empowers the model to effectively identify intricate patterns and relationships within the input data, thereby enhancing its overall representational capability.
Multi-head self-attention is a key innovation in transformers, contributing to their effectiveness in handling diverse and intricate sequences of data, such as those encountered in natural language processing and other sequence-based tasks.
3. Transformer Architecture
The architecture of transformers consists of both encoder and decoder blocks (Figure 2), which are fundamental components in sequence-to-sequence models, particularly in tasks such as machine translation [24].
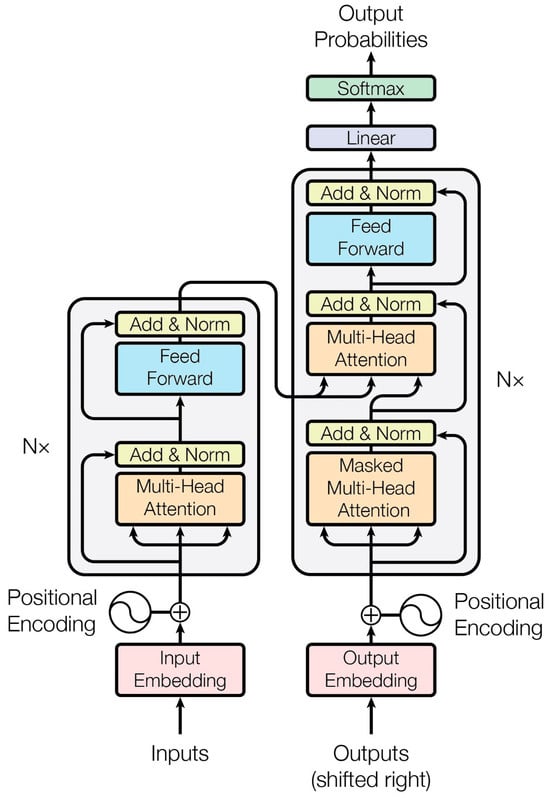
Figure 2. Transformer architecture [24].
Encoder: The encoder is responsible for processing the input sequence. It typically comprises multiple layers, each containing self-attention mechanisms and feedforward neural networks. In each layer, the input sequence is transformed through self-attention, allowing the model to capture dependencies and relationships within the sequence. The outputs from the self-attention are then passed through position-wise feedforward networks to further process the information. The encoder’s role is to create a rich representation of the input sequence, capturing its semantic and contextual information effectively.
Decoder: The decoder, on the other hand, is tasked with generating the output sequence based on the processed input. Similar to the encoder, it consists of multiple layers, each containing self-attention mechanisms and feedforward neural networks. However, the decoder also includes an additional cross-attention mechanism that allows it to focus on the input sequence (encoded representation) while generating the output. This enables the decoder to leverage the information from the input sequence to produce a meaningful output sequence.
The encoder–decoder architecture in transformers enables the model to effectively handle sequence-to-sequence tasks, such as machine translation and text summarization. It allows complex dependencies within the input sequence to be captured and that information to be leveraged to generate accurate and coherent output sequences.
4. Vision Transformers
The achievements of transformers in natural language processing have influenced the computer vision research community, leading to numerous endeavors to modify transformers for vision-related tasks. Transformer-based models specifically designed for vision applications have been rapidly developed, with notable examples including the detection transformer (DETR) [25], vision transformer (ViT), data-efficient image transformer (DeiT) [26], and Swin transformer [27]. These models represent significant advancements in leveraging transformers for computer vision and have gained recognition for their contributions to tasks such as object detection, image classification, and efficient image comprehension.
DETR: DETR, standing for DEtection TRansformer, has brought a major breakthrough in the realm of computer vision, particularly in the area of object detection tasks. Created by Carion et al. [25], DETR represents a departure from conventional methods that depended heavily on manual design processes, and demonstrates the potential of transformers to revolutionize object detection within the field of computer vision. This approach replaces the complex, hand-crafted object detection pipeline with a simpler one based on transformers. This method simplifies the intricate, manually crafted object detection pipeline by substituting it with a transformer.
The DETR uses a transformer encoder to comprehend the relationships between the image features derived from a CNN backbone. The transformer decoder generates object queries, and a feedforward network is responsible for assigning labels and determining bounding boxes around the objects. This involves a set-based global loss mechanism that ensures unique predictions through bipartite matching, along with a transformer encoder–decoder architecture. With a fixed small set of learned object queries, the DETR considers the relationships between objects and the global image context to directly produce the final set of predictions in parallel.
ViT: Following the introduction of the DETR, Dosovitskiy et al. [10] introduced the Vision Transformer (ViT), a model that employs the fundamental architecture of the traditional transformer for image classification tasks. As depicted in Figure 3, the ViT operates similarly to a BERT-like encoder-only transformer, utilizing a series of vector representations to classify images.
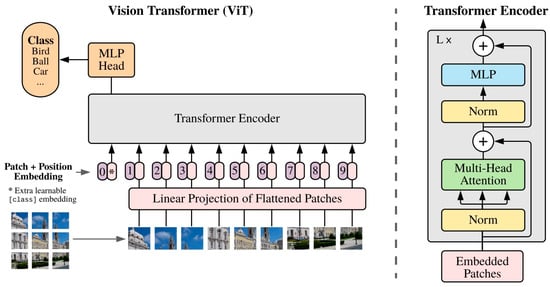
Figure 3. Vision transformer overview [10].
The process begins with the input image being converted into a sequence of patches. Each patch is paired by a positional encoding technique, which encodes the spatial positions of the patches to provide spatial information. These patches, along with a class token, are then fed into the transformer. This process computes the Multi-Head Self-Attention (MHSA) and generates the learned embeddings of the patches. The class token’s state from the ViT’s output serves as the image’s representation. Lastly, a multi-layer perceptron (MLP) is used to classify the learned image representation.
Moreover, the ViT can also accept feature maps from CNNs as input for relational mapping, in addition to raw images. This flexibility allows for more nuanced and complex image analyses.
DeiT: To address the issue of the ViT requiring vast amounts of training data, Touvron et al. [26] introduced the Data-efficient Image Transformer (DeiT) to achieve high performance on small-scale data.
In the context of knowledge distillation, a teacher–student framework was implemented, incorporating a distillation token, a term used in transformer terminology. This token followed the input sequence and enabled the student model to learn from the output of the teacher model. They hypothesized that using a CNN as the teacher model could assist in training the transformer as the student network, allowing the student network to inherit inductive bias.
Swin Transformer Introduced by Ze Liu et al. in 2021 [27], the Swin transformer is a transformer architecture known for its ability to generate a hierarchical feature representation. This architecture exhibits linear computational complexity relative to the size of the input image. It is particularly useful in various computer vision tasks due to its ability to serve as a versatile backbone. These tasks include instance segmentation, semantic segmentation, image classification, and object detection.
The Swin transformer is based on the standard transformer architecture, but it uses shifted windows to process images at different scales. The Swin transformer is designed to be more efficient than other transformer architectures, such as the ViT, with smaller datasets.
PVT: The Pyramid Vision Transformer (PVT) [28] is a transformer variant that is adept at handling dense prediction tasks. It employs a pyramid structure, enabling detailed inputs (4 × 4 pixels per patch) and reducing the sequence length of the transformer as it deepens, thus lowering the computational cost. The PVT comprises several key components: dense connections for learning complex patterns, feedforward networks for data processing, layer normalization for stabilizing learning, residual connections (Skip Connections) for mitigating the vanishing gradients problem, and scaled dot-product attention for calculating the input data relevance.
CvT: The Convolutional Vision Transformer (CvT) [29] is an innovative architecture that enhances the vision transformer (ViT) by integrating convolutions. This enhancement is realized through two primary alterations: a hierarchical structure of transformers with a new convolutional token embedding, and a convolutional transformer block that employs a convolutional projection. The convolutional token embedding layer provides the ability to modify the token feature dimension and the quantity of tokens at each level, allowing the tokens to depict progressively intricate visual patterns across wider spatial areas, similar to feature layers in CNNs. The convolutional transformer block replaces the linear projection in the transformer module with a convolutional projection, capturing the local spatial context and reducing semantic ambiguity in the attention mechanism.
The CvT architecture has been found to exhibit superior performance compared to other vision transformers and ResNets on ImageNet-1k. Interestingly, the CvT model demonstrates that positional encoding, a crucial element in existing vision transformers, can be safely discarded. This simplification allows the model to handle higher-resolution vision tasks more effectively.
HVT: The Hybrid Vision Transformer (HVT) [30] is a unique architecture that merges the advantages of CNNs and transformers for image processing. It capitalizes on transformers’ ability to concentrate on global relationships in images and CNNs’ capacity to model local correlations, resulting in superior performance across various computer vision tasks. HVTs typically blend both the convolution operation and self-attention mechanism, enabling the exploitation of both local and global image representations. They have demonstrated impressive results in vision applications, providing a viable alternative to traditional CNNs, and have been successfully deployed in tasks such as image segmentation, object detection, and surveillance anomaly detection. However, the specific implementation of the HVT can vary significantly depending on the task and requirements, with some HVTs incorporating additional components or modifications to further boost performance. In essence, the hybrid vision transformer is a potent tool for image processing tasks, amalgamating the strengths of both CNNs and transformers to achieve high performance.
References
- Koutras, A.; Perros, P.; Prokopakis, I.; Ntounis, T.; Fasoulakis, Z.; Pittokopitou, S.; Samara, A.A.; Valsamaki, A.; Douligeris, A.; Mortaki, A. Advantages and Limitations of Ultrasound as a Screening Test for Ovarian Cancer. Diagnostics 2023, 13, 2078.
- Leung, K.-Y. Applications of Advanced Ultrasound Technology in Obstetrics. Diagnostics 2021, 11, 1217.
- Brunetti, N.; Calabrese, M.; Martinoli, C.; Tagliafico, A.S. Artificial intelligence in breast ultrasound: From diagnosis to prognosis—A rapid review. Diagnostics 2022, 13, 58.
- Gifani, P.; Vafaeezadeh, M.; Ghorbani, M.; Mehri-Kakavand, G.; Pursamimi, M.; Shalbaf, A.; Davanloo, A.A. Automatic diagnosis of stage of COVID-19 patients using an ensemble of transfer learning with convolutional neural networks based on computed tomography images. J. Med. Signals Sens. 2023, 13, 101–109.
- Ait Nasser, A.; Akhloufi, M.A. A review of recent advances in deep learning models for chest disease detection using radiography. Diagnostics 2023, 13, 159.
- Shalbaf, A.; Gifani, P.; Mehri-Kakavand, G.; Pursamimi, M.; Ghorbani, M.; Davanloo, A.A.; Vafaeezadeh, M. Automatic diagnosis of severity of COVID-19 patients using an ensemble of transfer learning models with convolutional neural networks in CT images. Pol. J. Med. Phys. Eng. 2022, 28, 117–126.
- Qian, J.; Li, H.; Wang, J.; He, L. Recent Advances in Explainable Artificial Intelligence for Magnetic Resonance Imaging. Diagnostics 2023, 13, 1571.
- Vafaeezadeh, M.; Behnam, H.; Hosseinsabet, A.; Gifani, P. A deep learning approach for the automatic recognition of prosthetic mitral valve in echocardiographic images. Comput. Biol. Med. 2021, 133, 104388.
- Gifani, P.; Shalbaf, A.; Vafaeezadeh, M. Automated detection of COVID-19 using ensemble of transfer learning with deep convolutional neural network based on CT scans. Int. J. Comput. Assist. Radiol. Surg. 2021, 16, 115–123.
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16x16 words: Transformers for image recognition at scale. In Proceedings of the International Conference on Learning Representations, Virtual, 3–7 May 2021.
- Reynaud, H.; Vlontzos, A.; Hou, B.; Beqiri, A.; Leeson, P.; Kainz, B. Ultrasound video transformers for cardiac ejection fraction estimation. In Proceedings of the Medical Image Computing and Computer Assisted Intervention–MICCAI 2021: 24th International Conference, Strasbourg, France, 27 September–1 October 2021; Proceedings, Part VI 24, 2021. pp. 495–505.
- Gilany, M.; Wilson, P.; Perera-Ortega, A.; Jamzad, A.; To, M.N.N.; Fooladgar, F.; Wodlinger, B.; Abolmaesumi, P.; Mousavi, P. TRUSformer: Improving prostate cancer detection from micro-ultrasound using attention and self-supervision. Int. J. Comput. Assist. Radiol. Surg. 2023, 18, 1193–1200.
- Dadoun, H.; Rousseau, A.-L.; de Kerviler, E.; Correas, J.-M.; Tissier, A.-M.; Joujou, F.; Bodard, S.; Khezzane, K.; de Margerie-Mellon, C.; Delingette, H. Deep learning for the detection, localization, and characterization of focal liver lesions on abdominal US images. Radiol. Artif. Intell. 2022, 4, e210110.
- Wang, W.; Jiang, R.; Cui, N.; Li, Q.; Yuan, F.; Xiao, Z. Semi-supervised vision transformer with adaptive token sampling for breast cancer classification. Front. Pharmacol. 2022, 13, 929755.
- Liu, X.; Almekkawy, M. Ultrasound Localization Microscopy Using Deep Neural Network. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2023, 70, 625–635.
- Liu, Y.; Zhao, J.; Luo, Q.; Shen, C.; Wang, R.; Ding, X. Automated classification of cervical lymph-node-level from ultrasound using Depthwise Separable Convolutional Swin Transformer. Comput. Biol. Med. 2022, 148, 105821.
- Perera, S.; Adhikari, S.; Yilmaz, A. Pocformer: A lightweight transformer architecture for detection of COVID-19 using point of care ultrasound. In Proceedings of the 2021 IEEE International Conference on Image Processing (ICIP), Anchorage, AK, USA, 19–22 September 2021; pp. 195–199.
- Li, J.; Zhang, P.; Wang, T.; Zhu, L.; Liu, R.; Yang, X.; Wang, K.; Shen, D.; Sheng, B. DSMT-Net: Dual Self-supervised Multi-operator Transformation for Multi-source Endoscopic Ultrasound Diagnosis. IEEE Trans. Med. Imaging 2023, 43, 64–75.
- Hu, X.; Cao, Y.; Hu, W.; Zhang, W.; Li, J.; Wang, C.; Mukhopadhyay, S.C.; Li, Y.; Liu, Z.; Li, S. Refined feature-based Multi-frame and Multi-scale Fusing Gate network for accurate segmentation of plaques in ultrasound videos. Comput. Biol. Med. 2023, 163, 107091.
- Xia, M.; Yang, H.; Qu, Y.; Guo, Y.; Zhou, G.; Zhang, F.; Wang, Y. Multilevel structure-preserved GAN for domain adaptation in intravascular ultrasound analysis. Med. Image Anal. 2022, 82, 102614.
- Yang, C.; Liao, S.; Yang, Z.; Guo, J.; Zhang, Z.; Yang, Y.; Guo, Y.; Yin, S.; Liu, C.; Kang, Y. RDHCformer: Fusing ResDCN and Transformers for Fetal Head Circumference Automatic Measurement in 2D Ultrasound Images. Front. Med. 2022, 9, 848904.
- Sankari, V.R.; Raykar, D.A.; Snekhalatha, U.; Karthik, V.; Shetty, V. Automated detection of cystitis in ultrasound images using deep learning techniques. IEEE Access 2023, 11, 104179–104190.
- Basu, S.; Gupta, M.; Rana, P.; Gupta, P.; Arora, C. RadFormer: Transformers with global–local attention for interpretable and accurate Gallbladder Cancer detection. Med. Image Anal. 2023, 83, 102676.
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008.
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 213–229.
- Touvron, H.; Cord, M.; Douze, M.; Massa, F.; Sablayrolles, A.; Jégou, H. Training data-efficient image transformers & distillation through attention. In Proceedings of the International Conference on Machine Learning, Online, 18–24 July 2021; pp. 10347–10357.
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision; Montreal, BC, Canada, 10–17 October 2021, pp. 10012–10022.
- Wang, W.; Xie, E.; Li, X.; Fan, D.-P.; Song, K.; Liang, D.; Lu, T.; Luo, P.; Shao, L. Pyramid vision transformer: A versatile backbone for dense prediction without convolutions. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 10–17 October 2021; pp. 568–578.
- Wu, H.; Xiao, B.; Codella, N.; Liu, M.; Dai, X.; Yuan, L.; Zhang, L. Cvt: Introducing convolutions to vision transformers. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 22–31.
- Ranftl, R.; Bochkovskiy, A.; Koltun, V. Vision transformers for dense prediction. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 12179–12188.
More
Information
Subjects:
Engineering, Biomedical
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.0K
Revisions:
2 times
(View History)
Update Date:
13 Mar 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No