Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Agnieszka Lazarowska | -- | 3855 | 2024-02-02 09:19:40 | | | |
| 2 | Fanny Huang | Meta information modification | 3855 | 2024-02-18 10:05:04 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Rybczak, M.; Popowniak, N.; Lazarowska, A. Supervised Learning Approaches for Mobile Robot Control. Encyclopedia. Available online: https://encyclopedia.pub/entry/54697 (accessed on 15 July 2026).
Rybczak M, Popowniak N, Lazarowska A. Supervised Learning Approaches for Mobile Robot Control. Encyclopedia. Available at: https://encyclopedia.pub/entry/54697. Accessed July 15, 2026.
Rybczak, Monika, Natalia Popowniak, Agnieszka Lazarowska. "Supervised Learning Approaches for Mobile Robot Control" Encyclopedia, https://encyclopedia.pub/entry/54697 (accessed July 15, 2026).
Rybczak, M., Popowniak, N., & Lazarowska, A. (2024, February 02). Supervised Learning Approaches for Mobile Robot Control. In Encyclopedia. https://encyclopedia.pub/entry/54697
Rybczak, Monika, et al. "Supervised Learning Approaches for Mobile Robot Control." Encyclopedia. Web. 02 February, 2024.
Copy Citation
Machine learning (ML) is a branch of artificial intelligence that has been developing at a dynamic pace in recent years. ML is also linked with Big Data, which are huge datasets that need special tools and approaches to process them. ML algorithms make use of data to learn how to perform specific tasks or make appropriate decisions. ML approaches that have been applied to the task of mobile robot control are divided into the following: supervised learning, unsupervised learning, and reinforcement learning. The supervised learning methods are grouped into two main categories of regression and classification.
artificial intelligence
machine learning
mobile robots
1. Introduction
Machine learning (ML) is a rapidly growing part of the science in artificial intelligence. ML algorithms are mainly based on huge databases, which are categorized and processed accordingly. For example, the authors in [1][2][3] discussed the classification of machine learning-based schemes in healthcare, categorizing them based on data preprocessing and learning methods. They emphasized that ML has potential; however, there is still an issue in the appropriate selection of data on which the algorithms are to learn from. For example, the paper of [4] presented the idea that building databases for medicine is based on the many hundreds of (for example) images of a single case; furthermore, the paper noted that this will stimulate collaboration between scientists even more than it does today. The authors mentioned that “Machine learning fuelled by the right data has the power to transform the development of breakthrough, new medicines and optimise their use in patient care”. Another example [5] is a review of articles related to the use of artificial intelligence as a tool in higher education. Machine learning in automation is used especially in robots. An interesting example of the use of machine learning and inverse kinematics is the work on the motion simulation of an industrial robot, the results of which clearly presented a reduction in development time and investment [6][7].
The applications of machine learning methods for mobile robots is focused on. A very interesting overview of the techniques was presented in [8], where ML was applied for the classification of defects in wheeled mobile robots. Several techniques, i.e., random forest, support vector machine, artificial neural network, and recurrent neural network, were investigated in this research. The authors stated that machine learning can be applied to improve the performance of mobile robots, thus allowing them to save energy by waiting close to the point where work orders come in most often. An algorithm based on reinforcement learning was proposed for mobile robots in [9]. This algorithm discretizes obstacle information and target direction information into finite states, designs a continuous reward function, and improves training performance. The algorithm was tested in a simulation environment and on a real robot [10]. Another study focused on using deep reinforcement learning to train real robot primitive skills such as go-to-ball and shoot the goalie [11]. The study presented state and action representation, reward and network architecture, as well as showed good performance on real robots. An improved genetic algorithm was used for path planning in mobile robots, thereby solving problems such as path smoothness and large control angles [12]. Finally, a binary classifier and positioning error compensation model that combined the genetic algorithm and extreme learning machine was proposed for the indoor positioning of mobile robots.
Many authors claim that they achieve very satisfactory results applying ML methods in mobile robot problems. For example, in the work of [13], the best results for mobile robots in machine learning were obtained using Central Moments as a feature extractor and Optimum Path Forest as a classifier with an accuracy of 96.61%. The authors of [9] stated that the developed algorithm for autonomous mobile robots in industrial areas enabled the execution of work orders with a 100% accuracy. In [14], the proposed model was based on the Extreme Learning Machine-based Genetic Algorithm (GA-ELM), which achieved a 71.32% reduction in positioning error for mobile robots without signal interference. These are just a few examples of the recent research applying different ML approaches in robotics.
The machine learning methods, as shown in Figure 1, are divided into the following: supervised learning, unsupervised learning, reinforcement learning, and semi-supervised learning.
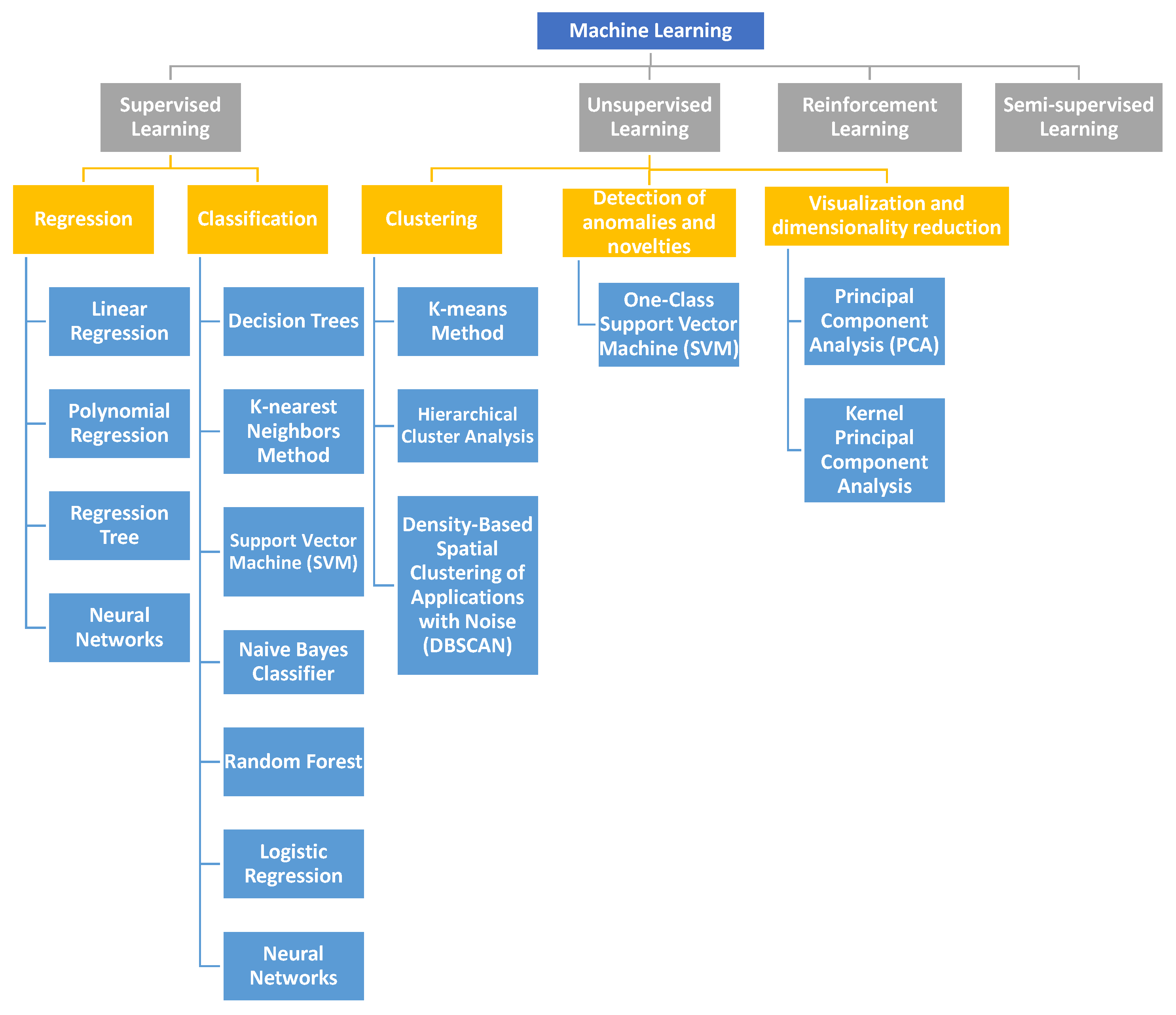
Figure 1. The classification of machine learning methods.
Robotics is one of the vital branches of science and technology nowadays, experiencing dynamic growth. Therefore, it is very difficult to track the development of all topics belonging to this area of knowledge. The surveys of the works associated with the specific aspects of this field of research can be found in the recent literature. In [15], the authors concentrated on the heuristic methods applied for the robot path planning in the years 1965–2012. Their study included the application of neural networks (NN), fuzzy logic (FL), and nature-inspired algorithms such as the following: genetic algorithms (GA), particle swarm optimization (PSO), and ant colony optimization (ACO). In [16], the authors presented the approaches utilizing artificial intelligence (AI), machine learning (ML), and deep learning (DL) in different tasks of advanced robotics, such as the following: autonomous navigation, object recognition and manipulation, natural language processing, and predictive maintenance. They presented different applications of AI, ML and DL in industrial robots, advanced transportation systems, drones, ship navigation, aeronautical industry, aviation managements, and taxi services. An overview of ML algorithms applied for the control of bipedal robots was presented in [17]. In the work of [18], the authors introduced a review of Visual SLAM methods based on DL.
The classification of mobile robots can be based on the type of the motion system, as shown in [19], where the wheeled mobile robots and the walking robots can be distinguished. The examples of mobile robots classified to both types of motion systems are shown in Figure 2 and Figure 3.
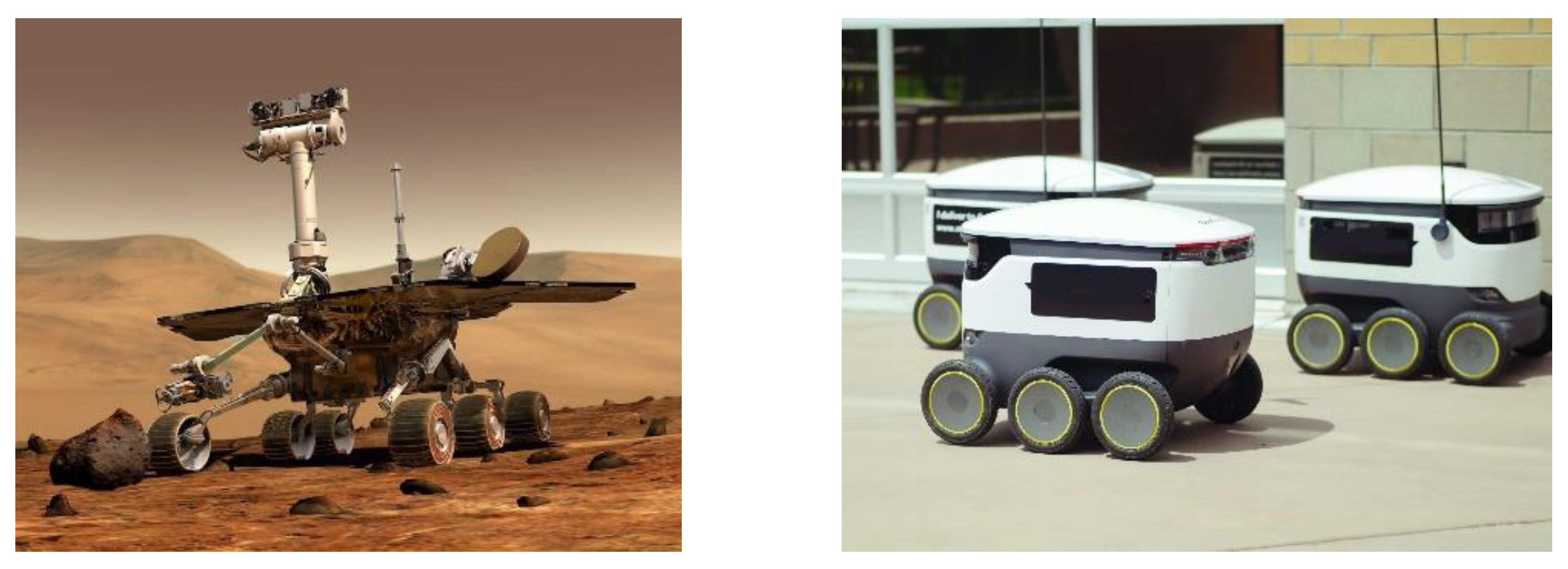
Figure 2. The examples of the wheeled robots.

Figure 3. The examples of the walking robots.
The main issues concerning mobile robots can be classified into navigation, control, and remote sensing, as stated in [20].
One of the specific tasks that is associated with the navigation of the mobile robots is the localization and environment mapping, which is also known as Simultaneous Localization and Mapping (SLAM). The SLAM algorithms allow for the environment mapping with the simultaneous tracking of the current robot’s position. The SLAM algorithms perceive the environment using sensors such as the following: cameras, lidars, and radars. The different subtasks of SLAM are the environment perception, the robot localization/position estimation, and the environment mapping.
The remote sensing in mobile robots deals with the usage of different sensors in order to perceive the robot’s surroundings. The commonly used sensors are cameras, lidars (Light Detection and Ranging), radars (Radio Detection and Ranging), ultrasonic sensors, infrared sensors and the GPS (Global Positioning System). The specific tasks being developed in the mobile robotics research, which are associated with the remote sensing and the sensor data collecting, include the data dimensionality reduction, the feature selection, the terrain classification and the machine vision solutions.
The path planning and obstacle avoidance tasks are inherent in the navigation of mobile robots. The path planning algorithms calculate a feasible, optimal or near-optimal path from the current position of a robot to the defined goal position. The most commonly applied optimization criteria are the shortest distance and the minimal energy consumption. The path planning process has to consider the avoidance of static and dynamic obstacles. The obstacle avoidance problem is also related to the obstacle detection and clustering. Another issue also connected with this topic is the target attraction task, which is aimed at leading the mobile robot toward a specific target or a goal position.
The mobile robotics research is also concentrated on the motion control that includes the attitude control, the heading control, the speed control, and the steering along a path. In this last task, a trajectory controller has to be developed. Other topics that are related to the mobile robot motion control include learning to walk, which is associated with the walking robots, the multirobot coordination and the autonomous navigation.
The classification of the mobile robotics tasks is divided into four main categories: SLAM, sensor data, path planning, and motion control, which are presented in Figure 4.
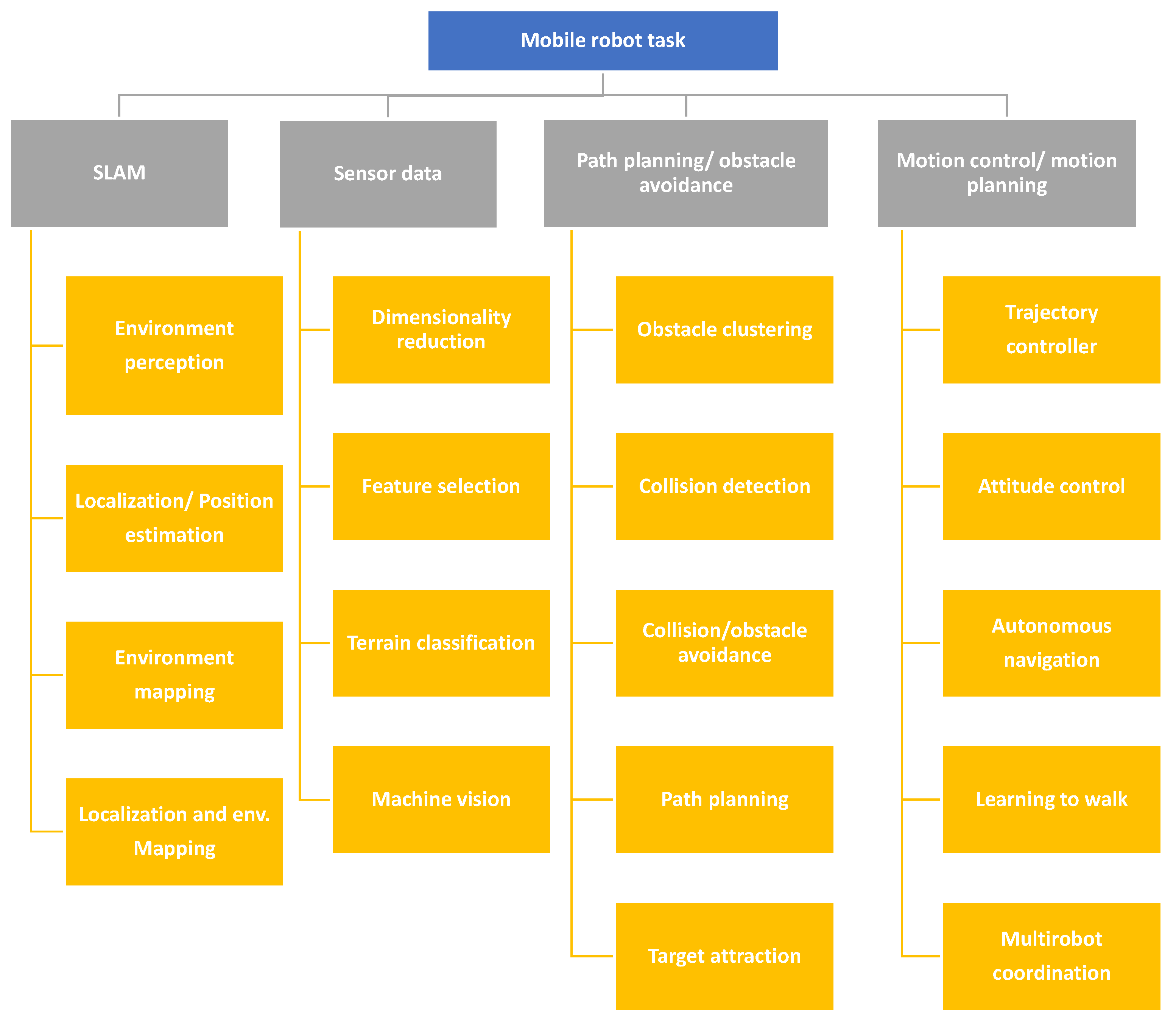
Figure 4. The classification of the mobile robotics tasks.
2. Supervised Learning Approaches
The main application areas of the supervised learning methods are the regression and the classification problems, as shown in Figure 1.
The aim of the regression algorithm is to predict a value of an output variable. An example of a regression problem is the forecasting of the value of a car based on its features such as the following: the model, the brand, the year of production, and the engine capacity. Another similar case is the prediction of the house prices based on their various features, such as the following: the number of bedrooms, the neighborhood’s crime rate, and the proximity to schools. An example of the SL application in a different domain is the estimation of a person’s age based on the facial features. The common regression algorithms include linear regression, polynomial regression, regression tree, and neural networks.
The goal of the classification algorithm is the categorization of the input data into the predefined classes or categories. An example of a classification problem is the task of classifying a message as “spam” or “non-spam”. Other classification tasks include the image classification, the sentiment analysis, and the disease diagnosis. The common classification algorithms include decision trees, the k-nearest neighbors method, support vector machines (SVM), the Naive Bayes classifier, the random forest, logistic regression, and neural networks.
2.1. Regression Methods
As mentioned above, the supervised learning methods are grouped into two main categories of regression and classification. A literature review of the regression approaches that were applied in mobile robotics is presented. Table 1 shows a comparative analysis of the recent SL algorithms that were proposed for solving of the regression problems in mobile robots.
Table 1. A comparison of the SL regression algorithms used in mobile robots.
| Method | Authors | Year | Object | Task | Simulations/Real Exp. |
|---|---|---|---|---|---|
| Linear regression | Sharma et al. [21] | 2016 | Mobile robot | Localization | Simulations |
| Linear regression | Das et al. [22] | 2022 | Mobile robot | Collision avoidance, path planning | Sim. and real exp. |
| Linear regression | Naveen et al. [23] | 2020 | Mobile robot | Obstacle avoidance | Real exp. |
| GPR | Gonzalez et al. [24] | 2018 | Single wheel | Slippage prediction | Real exp. |
| ANN | Crnokić et al. [25] | 2023 | Mobile robot | Sensor data | Simulations |
| CNN | Ballesta et al. [26] | 2021 | Mobile robot | Localization | Real exp. |
The SL regression methods are applied in mobile robots for tasks such as the following: localization, obstacle detection and avoidance, path planning, and slippage prediction.
The charts presenting the statistics of the SL regression algorithms applied in mobile robotics are shown in Figure 5.
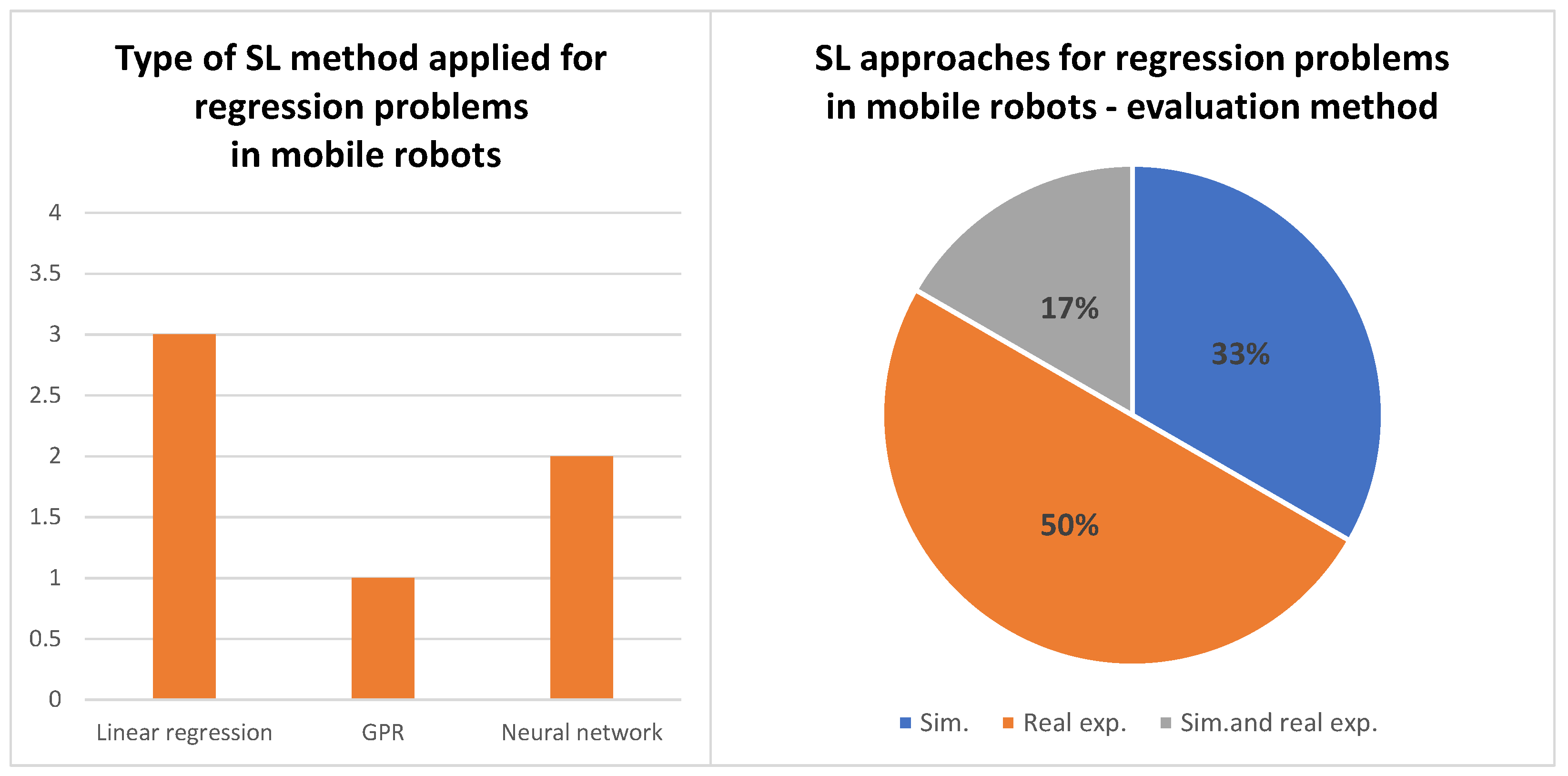
Figure 5. The types of the SL regression algorithms applied for solving the problems of mobile robots in the works considered in this survey (left chart); the types of the evaluation methods used in the works regarding the SL regression algorithms for solving the problems of mobile robots in the works considered in this survey (right chart).
2.1.1. Regression Methods for Robot Localization
One of the tasks of mobile robots, according to Figure 4, is the robot localization. In [21], the authors proposed a method for the identification of the optimal value of the wheel speed. The approach was used for the relative localization of a differentially driven robot, moving on the circular and straight paths. The linear regression analysis was performed in order to find the relationship between the wheel speed and the odometry of the two-wheeled differential drive mobile robot. The test that used the Analysis of Variance (ANOVA) technique was carried out based on the statistical tools available in the MINITAB scientific analysis software. The V-Rep 3.2.1 simulation software was used for the validation of the proposed method.
In [26], the authors described the application of the convolutional neural network (CNN) for the robot localization problem. The issue was solved using a hierarchical approach. In the first stage, the CNN solved a classification problem and found the room where the robot was located. In the second stage, the regression CNN was applied in order to estimate the exact position of the robot (the X and Y coordinates). The approach was tested with the use of the dataset containing the sensor data that were registered by a mobile robot under real operating conditions.
2.1.2. Regression Methods for Obstacle Detection
In [25], the authors proposed the application of the artificial neural networks (ANNs) for the obstacle detection with the use of data from infrared (IR) sensors and a camera. The ANN was developed and trained using the Matlab/Simulink software, and the simulation tests were carried out in the RobotinoSIM virtual environment. An obstacle detection accuracy of 85.56% was achieved. The authors stated that in order to accomplish greater accuracy, a larger dataset should be used, but it would cause longer learning and data processing times. The usage of hardware with higher computational capabilities would also be needed.
2.1.3. Regression Methods for Obstacle Avoidance and Other Tasks
A linear regression approach for the collision avoidance and path planning of an autonomous mobile robot (AMR) was proposed in [22]. The authors developed the adaptive stochastic gradient descent linear regression (ASGDLR) algorithm for solving this task. The velocities of the right and left wheels, and the distance from an obstacle, were measured by two infrared sensors and one ultrasonic sensor. The stochastic gradient descent (SGD) optimization technique was applied for the iterative updating of the ASGDLR model weights. The difference between the actual velocity and the model output velocity was used as an error signal. The ASGDLR algorithm was implemented on the NodeMCU ESP 8266 controller. The method was verified in the simulations test with the use of the Python IDLE platform and the Matlab software as well as in real experiments using an AMR. The approach was also compared with four other algorithms: VFH, VFH*, FLC, and A*. The authors stated that the advantages of the algorithm are “the effectiveness of memory utilization and less time requirement for each command obtained as a command signal from the NodeMCU to the DC motor module compared to other Linear Regression algorithms”.
In [23], the authors proposed a linear regression approach for the mobile robot obstacle avoidance. The task was carried out by predicting the wheel velocities of the differential drive robot. Input data were obtained with the use of the ultrasonic sensors for the distance and the IR sensors for the wheel velocities measurements. The robot control platform used in this research was the Atmega328 microcontroller.
In [24], a slippage prediction method was introduced using Gaussian process regression (GPR). The approach was validated with the use of the MIT single-wheel testbed equipped with an MSL spare wheel. This solution can be useful for the off-road mobile robots. According to the authors, the results proved an appropriate trade-off between the accuracy and the computation time. The algorithm returned the variance associated with every prediction, which might be useful for the route planning and the control tasks.
2.2. Classification Methods
The second category in the supervised learning is the classification. The recent approaches for the classification problems applied in mobile robotics are presented. Table 2 presents a comparative analysis of the recent SL classification algorithms applied in mobile robotics.
Table 2. A comparison of the SL classification algorithms used in mobile robots.
| Method | Authors | Year | Object | Task | Simulations/Real Exp. |
|---|---|---|---|---|---|
| Decision trees | Swere and Mulvaney [27] | 2003 | Mobile robots | Navigation | Sim. and real exp. |
| Decision trees | Swere et al. [28] | 2006 | Mobile robots | Navigation | Sim. and real exp. |
| Decision trees | Roth et al. [29] | 2021 | Mobile robot | Navigation | Real exp. |
| K-nearest neighbors | Sarah and Riadh [30] | 2019 | Mobile robot | Navigation | Real exp. |
| K-nearest neighbors | Elias et al. [31] | 2021 | Mobile robot | Object detection | Real exp. |
| SVM | Zheng et al. [32] | 2021 | Mobile robot | Motion control | Real exp. |
| SVM | Liu et al. [33] | 2016 | Biped robot | Gait control | Real exp. |
| Random Forest | Liao et al. [34] | 2023 | Mobile robot | Terrain classification | Real exp. |
| Random Forest | Zhang et al. [35] | 2016 | Mobile robot | Terrain classification | Real exp. |
| Logistic regression | Becker and Ebner [36] | 2019 | Mobile robot | Collision detection | Real exp. |
| ANN | Sanusi et al. [37] | 2023 | Mobile robot | Terrain classification | Real exp. |
| CNN with LSTM | Hoshino and Yoshida [38] | 2022 | Mobile robot | Navigation | Real exp. |
| DNN | Kozlowski & Walas [39] | 2018 | Mobile robot | Terrain classification | Real exp. |
The charts presenting the statistics of the SL classification algorithms applied in mobile robotics are shown in Figure 6 and Figure 7.
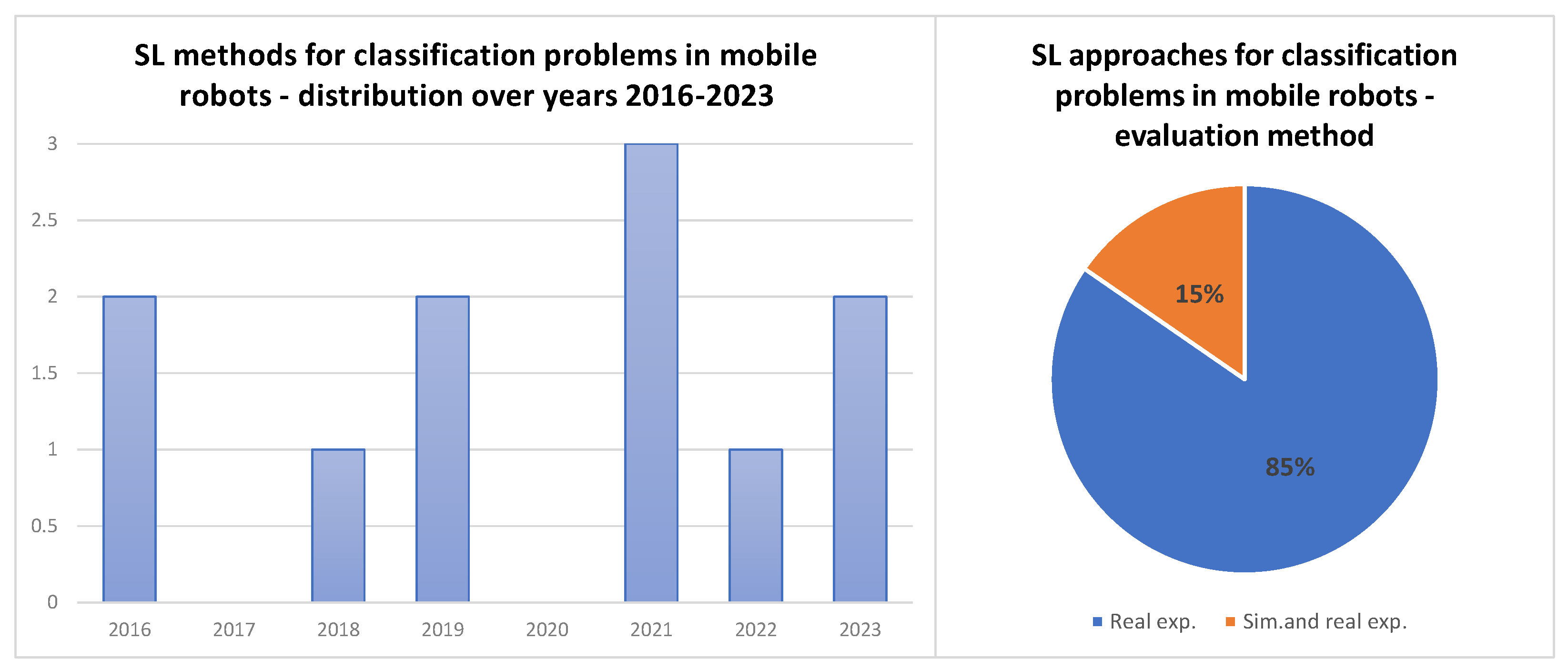
Figure 6. The distribution over the years 2007–2023 of the SL classification methods for mobile robots considered in this survey (left chart); the types of the evaluation methods used in the works regarding the SL classification algorithms for solving the problems of mobile robots in the works considered in this survey (right chart).
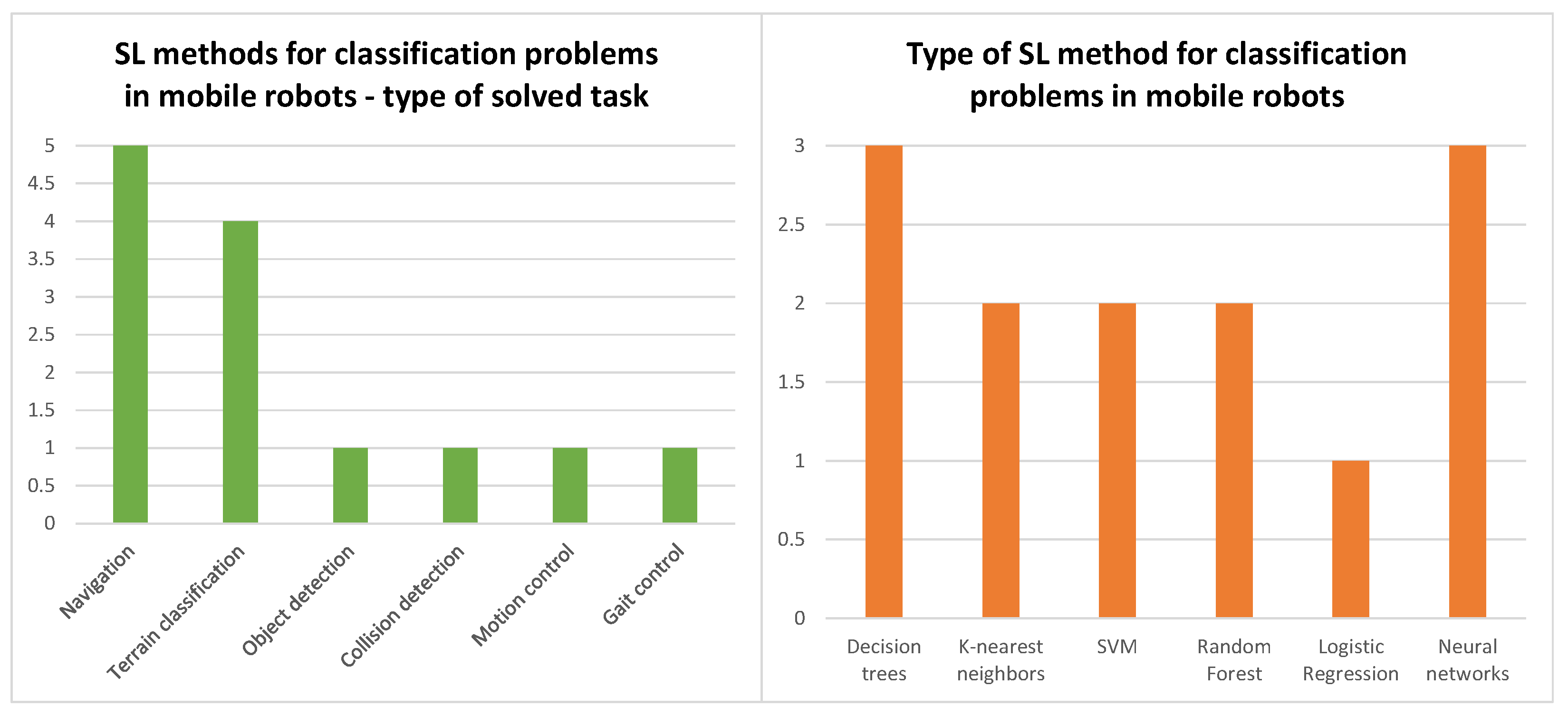
Figure 7. The types of the solved tasks in the works regarding SL classification methods considered in this survey (left chart); the types of the SL regression algorithms applied for solving the problems of mobile robots in the works considered in this survey (right chart).
2.2.1. Classification Methods for Terrain Type Recognition
An important issue in mobile robotics for the use in the rescue operations or the inspection tasks is the terrain classification. The appropriate recognition of the type of a terrain will enable for the mobile robot’s behavior adaptation to the environment. It will also allow the robot to reach the defined target faster and in a more effective way. The different supervised learning classification algorithms proved to be suitable for this task. The random forest classifier was proposed in the work of [35] for the evaluation of the traversability of the terrain.
In [34], the authors introduced the random forest classifier optimized by a genetic algorithm for the classification of ground types. This approach allowed overcoming the limitation of the traditional random forest algorithm, which is the lack of a formula for the determination of the optimal combination of many initial parameters. The method allowed the authors to achieve the recognition accuracy of 93%. This was a significantly higher value then the results obtained with the use of the traditional random forest algorithm.
An artificial neural network (ANN) was applied for the terrain classification in the research presented in [37]. The ANN was implemented on the Raspberry Pi 4B in order to process the vibration data in real time. The 9-DOF inertial measurement unit (IMU), including an accelerometer, a gyroscope, and a magnetometer, was used for the data reception. The Arduino Mega Board was used as a control unit. The carried out experiments allowed for the achievement of online terrain classification prediction results above 93%.
In the work of [39], a deep neural network (DNN) was applied for the terrain recognition task. The input data to the model were the vision data from an RGB-D sensor, which contained a depth map and an infrared image, in addition to the standard RGB data.
2.2.2. Classification Methods for Mobile Robot Navigation
In [27], the authors proposed the application of a decision tree algorithm for the mobile robot navigation. The developed learning system was aimed at performing the incremental learning in real time. It was using the limited memory in order to be applicable in an embedded system. The algorithm was developed using the Matlab environment and was tested with the use of the Talrik II mobile robot, equipped with 12 infrared sensors and sonar transmitters, and receivers. The controller was implemented on the ARM evaluator 7T development board, running the eCos real-time operating system. The continuation of this research was presented in [28]. The method proposed was based on the incremental decision tree. In this approach, the feature vectors were kept in the tree. The experiments with the use of a mobile robot, performing the real-time navigation task, showed that “the calculation time is typically an order of magnitude less than that of an incremental generation of an ITI decision tree”.
In the work of [29], the expert policy based on the deep reinforcement learning was applied for the calculation of a collision-free trajectory for a mobile robot in a dense, dynamic environment. In order to enhance the system’s reliability, an expert policy was combined with the policy extraction technique. The resulting policy was converted into a decision tree. The application of the decision trees was aimed at improving of the solutions obtained by the algorithm. The improvements included the smoothness of the trajectory, the frequency of oscillations, the frequency of immobilization, and the obstacle avoidance. The method was tested in simulations and with the use of the Clearpath Jackal robot, which was navigating in the environment with moving pedestrians.
In the work of [38], the authors introduced a motion planner based on the convolutional neural network (CNN) with the long short-term memory (LSTM). The imitation learning was applied for training the policy of the motion planner. In the experiments carried out, the robot was moving autonomously toward the destination and was also avoiding standing and walking persons.
In the work of [32], a method based on support vector machine (SVM) was proposed for the application to the mobile robot’s precise motion control. The control algorithm was implemented on the ARM9 control board. The results of the experiments proved the feasibility of the approach for the precise position control of a mobile robot. The achieved maximum error was less than 32 cm in the linear movement on the distance of 10 m.
In [30], the authors considered the application of the different classification algorithms for the wall following the navigation task of a mobile robot. They introduced the k-nearest neighbors approach and compared it with the other methods, such as the following: decision trees, neural networks, Naïve Bayes, JRipper and support vector machines.
2.2.3. Classification Methods for Other Tasks
In [31], the authors proposed the application of the k-nearest neighbors method for the image classification task. The approach was used for object detection and recognition in the machine vision-based mobile robotic system.
In [36], the authors applied logistic regression for the collision detection task. The training data were obtained from the acceleration sensor. The data were registered during the movement of a small mobile robot. The accelerometer data and the motor commands were afterwards combined in the logistic regression model. The Dagu T’Rex Tank chassis was used in the experiments. The robot was driven by two motors via the Sabertooth motor controller. The Arduino Mega 256 microcontroller was used as the robot’s control unit. The trained model detected 13 out of 14 collisions with no false positive results.
An essential task for the walking robots is learning to walk. In [33], the authors presented a method for the gait control. It was based on support vector machine (SVM) with the mixed kernel function (MKF). The ankle and the hip trajectories were applied as the inputs. The corresponding trunk trajectories were used as the outputs. The results of the SVM training were the dynamic kinematics relationships between the legs and the trunk of the biped robot. The authors stated that their method achieved better performance than the SVM with the radial basis function (RBF) kernels and the polynomial kernels.
The analysis of the recent approaches for the mobile robots based on the supervised learning techniques enabled stating that these methods were applied for the following:
-
The path control;
-
The robot navigation;
-
The environment mapping;
-
The robot’s position and orientation estimations;
-
The collision detection;
-
The clustering of the data registered with the use of the different robot’s sensors;
-
The recognition of the different terrain types;
-
The classification of the robot’s images;
-
The exploration and the path planning in unknown or partially known environments.
References
- Rahmani, A.M.; Yousefpoor, E.; Yousefpoor, M.S.; Mehmood, Z.; Haider, A.; Hosseinzadeh, M.; Ali Naqvi, R. Machine Learning (ML) in Medicine: Review, Applications, and Challenges. Mathematics 2021, 9, 2970.
- Verma, A.A.; Murray, J.; Greiner, R.; Cohen, J.P.; Shojania, K.G.; Ghassemi, M.; Straus, S.E.; Pou-Prom, C.; Mamdani, M. Implementing machine learning in medicine. Can. Med. Assoc. J. 2021, 193, E1351–E1357.
- May, M. Eight ways machine learning is assisting medicine. Nat. Med. 2021, 27, 2–3.
- Almaazmi, A.; Karmastaji, E.; Atallah, S.; Alkhazaleh, H.A.; Manoor, W. Learning Analytics and Machine Learning. In Proceedings of the 5th International Conference on Signal Processing and Information Security (ICSPIS), Dubai, United Arab Emirates, 7–8 December 2022; pp. 164–168.
- Pinto, A.S.; Abreu, A.; Costa, E.; Paiva, J. How Machine Learning (ML) is Transforming Higher Education: A Systematic Literature Review. J. Manag. Inf. Syst. 2023, 8, 21168.
- Nutonen, K.; Kuts, V.; Otto, T. Industrial Robot Training in the Simulation Using the Machine Learning Agent. Procedia Comput. Sci. 2023, 217, 446–455.
- Tagliani, F.L.; Pellegrini, N.; Aggogeri, F. Machine Learning Sequential Methodology for Robot Inverse Kinematic Modelling. Appl. Sci. 2022, 12, 9417.
- Ibrahim, F.; Boussaid, B.; Abdelkrim, M.N. Fault detection in wheeled mobile robot based Machine Learning. In Proceedings of the 19th International Multi-Conference on Systems, Signals & Devices (SSD), Sétif, Algeria, 6–10 May 2022; pp. 58–63.
- Kulaç, N.; Engin, M. Developing a Machine Learning Algorithm for Service Robots in Industrial Applications. Machines 2023, 11, 421.
- ZiXuan, L.; Qingchuan, W.; Bingsong, Y. Reinforcement Learning-Based Path Planning Algorithm for Mobile Robots. Wirel. Commun. Mob. Comput. 2022, 2022, 1859020.
- Zhu, Y.; Schwab, D.; Veloso, M. Learning Primitive Skills for Mobile Robots. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7597–7603.
- Li, Y.; Huang, Z.; Xie, Y. Path planning of mobile robot based on improved genetic algorithm. In Proceedings of the 3rd International Conference on Electron Device and Mechanical Engineering (ICEDME), Suzhou, China, 1–3 May 2020; pp. 691–695.
- Rebouças Filho, P.; Silva, S.; Ohata, E.; Almeida, J.; Sousa, P.; Nascimento, N.; Silva, F. A New Strategy for Mobile Robots Localization based on Omnidirectional Sonar Images and Machine Learning. In Proceedings of the 32th Conference on Graphics, Patterns and Images, Rio de Janeiro, Brazil, 28–31 October 2019; pp. 168–171.
- Ma, J.; Duan, X.; Shang, C.; Ma, M.; Zhang, D. Improved Extreme Learning Machine Based UWB Positioning for Mobile Robots with Signal Interference. Machines 2022, 10, 218.
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28.
- Soori, M.; Arezoo, B.; Dastres, R. Artificial intelligence, machine learning and deep learning in advanced robotics, a review. Cogn. Robot. 2023, 3, 54–70.
- Wang, S.; Chaovalitwongse, W.; Babuska, R. Machine Learning Algorithms in Bipedal Robot Control. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2012, 42, 728–743.
- Zhang, Y.; Wu, Y.; Tong, K.; Chen, H.; Yuan, Y. Review of Visual Simultaneous Localization and Mapping Based on Deep Learning. Remote Sens. 2023, 15, 2740.
- Moreno, J.; Clotet, E.; Lupiañez, R.; Tresanchez, M.; Martínez, D.; Pallejà, T.; Casanovas, J.; Palacín, J. Design, Implementation and Validation of the Three-Wheel Holonomic Motion System of the Assistant Personal Robot (APR). Sensors 2016, 16, 1658.
- Cook, G. Mobile Robots: Navigation, Control and Remote Sensing; Wiley-IEEE Press: Hoboken, NJ, USA, 2011; Available online: https://ieeexplore.ieee.org/book/6047594 (accessed on 2 January 2024).
- Sharma, A.; Patel, R.K.; Thapa, V.; Gairola, B.; Pandey, B.; Epenetus, B.A.; Choudhury, S.; Mondal, A.K. Investigation on optimized relative localization of a mobile robot using regression analysis. In Proceedings of the 2016 International Conference on Robotics: Current Trends and Future Challenges (RCTFC), Thanjavur, India, 19–20 December 2016; pp. 1–6.
- Das, S.; Mishra, S.K. A Machine Learning approach for collision avoidance and path planning of mobile robot under dense and cluttered environments. Comput. Electr. Eng. 2022, 103, 108376.
- Naveen, V.; Aasish, C.; Kavya, M.; Vidhyalakshmi, M.; Sailaja, K. Autonomous obstacle avoidance robot using regression. In Lecture Notes on Data Engineering and Communications Technologies, Proceedings of International Conference on Computational Intelligence and Data Engineering; Springer: Singapore, 2021; Volume 56, p. 56.
- Gonzalez, R.; Fiacchini, M.; Iagnemma, K. Slippage prediction for off-road mobile robots via machine learning regression and proprioceptive sensing. Robot. Auton. Syst. 2018, 105, 85–93.
- Crnokić, B.; Peko, I.; Grubišić, M. Artificial neural networks-based simulation of obstacle detection with a mobile robot in a virtual environment. Int. Robot. Auto J. 2023, 9, 62–67.
- Ballesta, M.; Payá, L.; Cebollada, S.; Reinoso, O.; Murcia, F. A CNN Regression Approach to Mobile Robot Localization Using Omnidirectional Images. Appl. Sci. 2021, 11, 7521.
- Swere, E.; Mulvaney, D.J. Robot navigation using decision trees. Electron. Syst. Control Div. Res. 2003. Available online: https://api.semanticscholar.org/CorpusID:16567021 (accessed on 6 November 2023).
- Swere, E.; Mulvaney, D.; Sillitoe, I. A fast memory-efficient incremental decision tree algorithm in its application to mobile robot navigation. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 645–650.
- Roth, A.M.; Liang, J.; Manocha, D. XAI-N: Sensor-based Robot Navigation using Expert Policies and Decision Trees. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 2053–2060.
- Sarah, M.; Riadh, B.-A. Comparison of Classification Techniques for Wall Following Robot Navigation and Improvements to the KNN Algorithm. Comput. Sci. Inf. Technol. 2019, 9, 73–87.
- Vega, J.E.M.; Chaidez, A.G.; García, C.M.; López, M.R.; Fuentes, W.F.; Sergiyenko, O. Recognition System by Using Machine Vision Tools and Machine Learning Techniques for Mobile Robots. In Examining Optoelectronics in Machine Vision and Applications in Industry 4.0; IGI Global: Hershey, PA, USA, 2019; Available online: https://www.irma-international.org/viewtitle/269678/?isxn=9781799865223 (accessed on 6 November 2023).
- Zheng, Y.; Hu, X.; Sun, H. Research on Motion Control for a Mobile Robot Using Learning Control Method. Appl. Math. Nonlinear Sci. 2021, 6, 227–234.
- Liu, Z.; Wang, L.; Zhang, Y.; Chen, C.L.P. A SVM controller for the stable walking of biped robots based on small sample sizes. Appl. Soft Comput. 2016, 38, 738–753.
- Liao, W. Ground classification based on optimal random forest model. In Proceedings of the 2023 IEEE International Conference on Control, Electronics and Computer Technology (ICCECT), Jilin, China, 28–30 April 2023; pp. 709–714.
- Zhang, H.; Dai, X.; Sun, F.; Yuan, J. Terrain classification in field environment based on Random Forest for the mobile robot. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6074–6079.
- Becker, F.; Ebner, M. Collision Detection for a Mobile Robot using Logistic Regression. In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), Prague, Czech Republic, 29–31 July 2019; pp. 167–173. Available online: https://www.scitepress.org/Papers/2019/77686/77686.pdf (accessed on 6 November 2023).
- Sanusi, M.A.; Dewantara, B.S.B.; Sigit, R.S. Online Terrain Classification Using Neural Network for Disaster Robot Application. Indones. J. Comput. Sci. 2023, 12, 48–62.
- Hoshino, S.; Yoshida, Y. Motion Planner based on CNN with LSTM through Mediated Perception. In Proceedings of the 2022 61st Annual Conference of the Society of Instrument and Control Engineers (SICE), Kumamoto, Japan, 6–9 September 2022; pp. 622–627.
- Kozlowski, P.; Walas, K. Deep neural networks for terrain recognition task. In Proceedings of the 2018 Baltic URSI Symposium (URSI), Poznan, Poland, 15–17 May 2018; pp. 283–286.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
950
Revisions:
2 times
(View History)
Update Date:
18 Feb 2024
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No