 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | József Vásárhelyi | -- | 2917 | 2023-12-20 13:30:29 | | | |
| 2 | Catherine Yang | -1 word(s) | 2916 | 2023-12-21 01:42:44 | | |
Video Upload Options
Autonomous systems are a rapidly developing research field that may revolutionize many industries and applications in transportation, manufacturing, healthcare, and agriculture. They offer the potential to boost effectiveness, to lower expenses, and to enhance safety. Autonomous systems incorporate sensors, software, and artificial intelligence algorithms to perceive their environment, make decisions, and take actions. However, one of the main challenges autonomous systems face is energy consumption. These systems require significant energy to power their sensors, processors, and other components. This is especially true for autonomous systems designed for mobility autonomous systems, such as autonomous vehicles (AVs) and unmanned aerial vehicles (UAVs).
1. Energy Consumption Problems in Autonomous Vehicles
Efficient Energy-Saving Methods in Autonomous Vehicles
-
The design aspects: They primarily include the configuration of vehicle components, namely batteries, motors, and body structure. These elements are recognized as foundational factors contributing to the AV driving range extension.
-
The control aspects: They pertain primarily to control various vehicle subsystems, including the braking system, steering system, and active suspension system.
-
Regenerative Braking: This involves converting kinetic energy into electrical energy during braking and storing it in the vehicle’s battery.
-
Predictive Cruise Control: This optimizes speed and acceleration patterns based on road circumstances.
-
Efficient Powertrains: They utilize high-efficiency electric motors and power electronics.
-
Low-Rolling Resistance Tires: These reduce the energy required to move the vehicle.
-
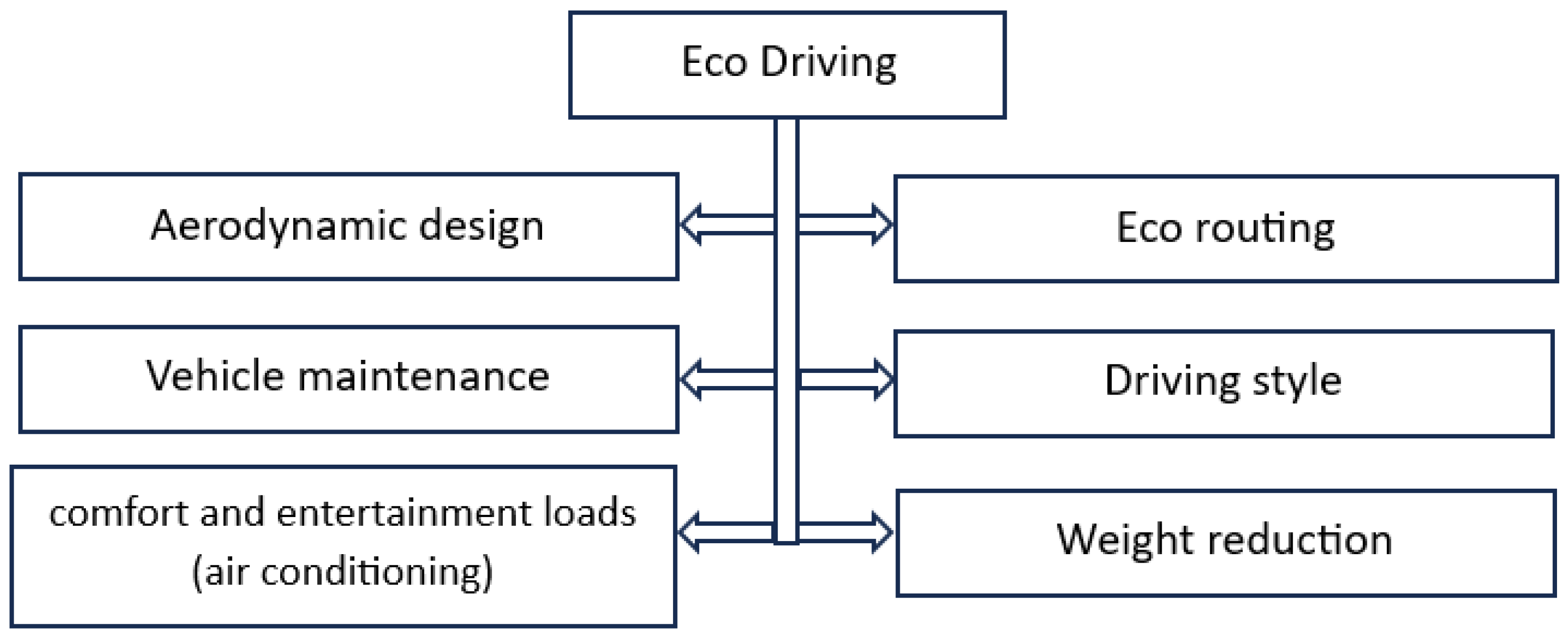
Weight Reduction: This reduces the overall weight of the vehicle by using lightweight materials.
-
Aerodynamic Design: This streamlines the vehicle’s shape to reduce air resistance.
-
Battery Management Systems (BMSs): They monitor and manage the battery’s state to optimize charging and discharging processes, extend the battery’s life, and maintain its efficiency.
-
Smart HVAC (heating, ventilation, and air conditioning) Systems: Using predictive climate control algorithms can help manage the vehicle’s interior temperature with minimal impact on the battery.
-
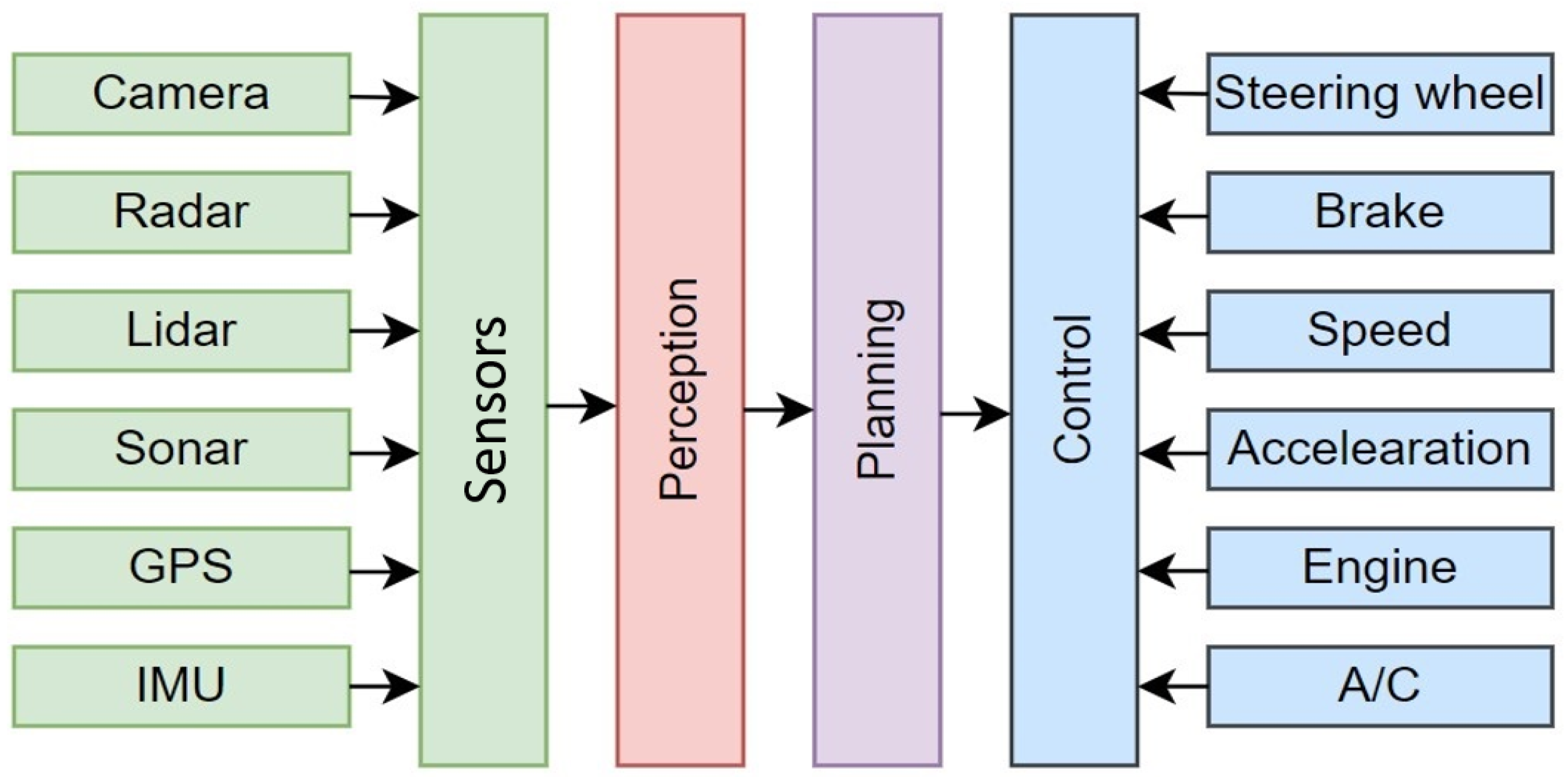
Energy-Efficient Software Algorithms: Software algorithms for decision-making, navigation, perception, and control algorithms contribute to overall energy savings.
-
Dynamic Route Planning: Real-time traffic and road condition data are utilized to optimize routes, avoid congestion, and reduce energy consumption.
2. Energy Consumption Problems in Unmanned Aerial Vehicles
-
Impact of taking off;
-
Impact of movement (hovering, horizontal movement and vertical movement);
-
Impact of payload: Increasing the mass of the drone affects the gravitational force, where energy is needed to keep the drone flying by keeping the stability;
-
Impact of speed: Increasing the drone’s velocity is achieved by increasing the torque of the rotors, which require a high current;
-
Impact of wind: The wind is a disturbance that affects the drone’s movement. Therefore, an opposite force should be applied to compensate for it. This opposite force is generated with higher energy consumption;
-
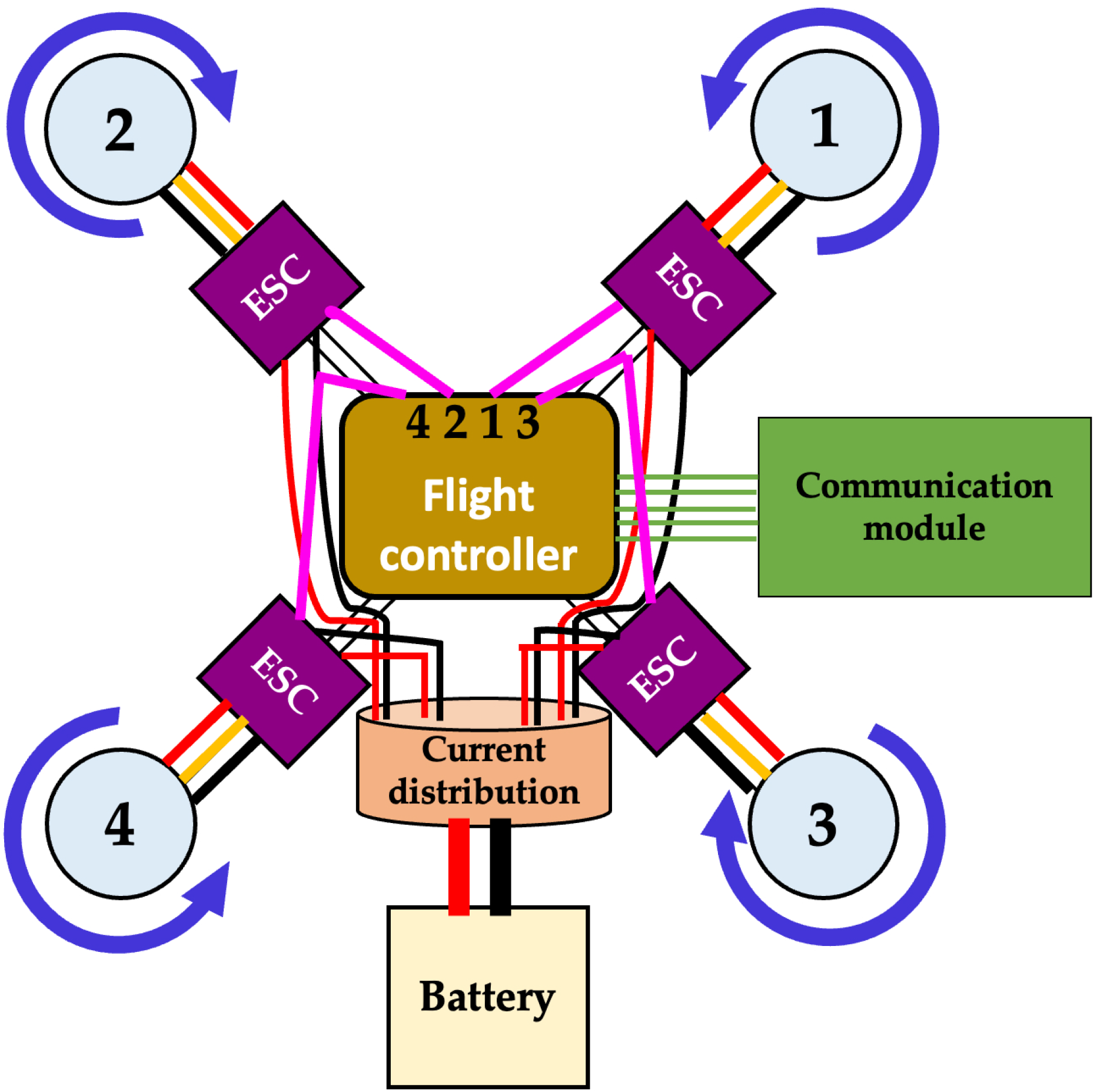
Impact of communication: Internal communication is executed with different sensors, between the controller and sensors such as GPS, Gyroscope, accelerometer, etc.
Energy Performance of Power Source in UAV
-
The gyroscope measures the orientation of the drone;
-
The accelerometer measures the linear acceleration;
-
The ultrasonic measures the distance from a target.
-
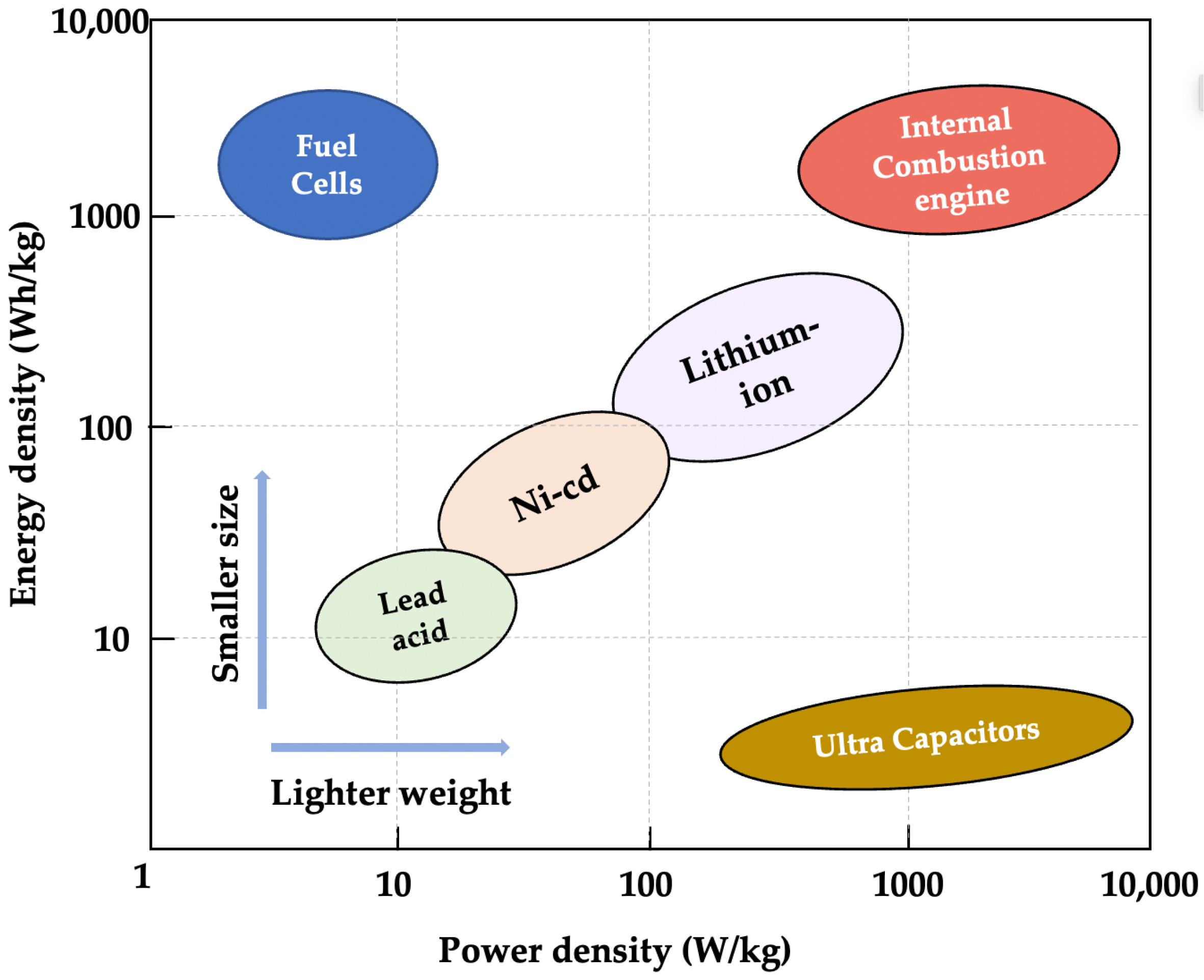
The power density affects the acceleration capabilities;
-
Energy density to identify the range;
-
Weight and volume, which affect the range of the system;
-
Cycle life to find out how often the battery should be replaced;
-
Cost regarding the budget;
-
Safety and maintenance.
References
- Brown, N.E.; Rojas, J.F.; Goberville, N.A.; Alzubi, H.; AlRousan, Q.; Wang, C.; Huff, S.; Rios-Torres, J.; Ekti, A.R.; LaClair, T.J.; et al. Development of an energy efficient and cost effective autonomous vehicle research platform. Sensors 2022, 22, 5999.
- Baxter, J.A.; Merced, D.A.; Costinett, D.J.; Tolbert, L.M.; Ozpineci, B. Review of electrical architectures and power requirements for automated vehicles. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 944–949.
- Mohan, A.; Sripad, S.; Vaishnav, P.; Viswanathan, V. Trade-offs between automation and light vehicle electrification. Nat. Energy 2020, 5, 543–549.
- Mahmoud, Y.H.; Brown, N.E.; Motallebiaraghi, F.; Koelling, M.; Meyer, R.; Asher, Z.D.; DontchevA; Kolmanovsky, I. Autonomous Eco-Driving with Traffic Light and Lead Vehicle Constraints: An Application of Best Constrained Interpolation. IFAC-PapersOnLine 2021, 54, 45–50.
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226.
- Xu, Y.; Li, H.; Liu, H.; Rodgers, M.O.; Guensler, R.L. Eco-driving for transit: An effective strategy to conserve fuel and emissions. Appl. Energy 2017, 194, 784–797.
- Meseguer, J.E.; Toh, C.K.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Driving styles: A mobile platform for driving styles and fuel consumption characterization. J. Commun. Netw. 2017, 19, 162–168.
- Connor, W.D.; Wang, Y.; Malikopoulos, A.A.; Advani, S.G.; Prasad, A.K. Impact of connectivity on energy consumption and battery life for electric vehicles. IEEE Trans. Intell. Veh. 2020, 6, 14–23.
- U.S. DOE. Connected and Automated Vehicles Capstone Report; Technical report; U.S. DOE Office of Energy Efficiency & Renewable Energy EERE: Washington, DC, USA, 2020.
- Amini, M.R.; Gong, X.; Feng, Y.; Wang, H.; Kolmanovsky, I.; Sun, J. Sequential opt of speed, thermal load, and power split in connected hevs. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4614–4620.
- Nazari, S.; Prakash, N.; Siegel, J.; Stefanopoulou, A. On the effectiveness of hybridization paired with Eco-Driving. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4635–4640.
- Deshpande, S.R.; Gupta, S.; Gupta, A.; Canova, M. Real-Time Ecodriving Control in Electrified Connected and Autonomous Vehicles Using Approximate Dynamic Programing. ASME J. Dyn. Syst. Meas. Control 2022, 144, 011111.
- Dadras, S.; Jamshidi, H.; Dadras, S.; Pilutti, T.E. Novel Stop Sign Detection Algorithm Based on Vehicle Speed Profile. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3994–3999.
- Dadras, S. Path Tracking Using Fractional Order Extremum Seeking Controller for Autonomous Ground Vehicle. SAE Tech. Pap. 2017.
- Gaikwad, T.; Rabinowitz, A.; Motallebiaraghi, F.; Bradley, T.; Asher, Z.; Fong, A.; Meyer, R. Vehicle Velocity Prediction Using Artificial Neural Network and Effect of Real World Signals on Prediction Window. SAE Tech. Pap. 2020, 0148–7191.
- Gaikwad, T.D.; Asher, Z.D.; Liu, K.; Huang, M.; Kolmanovsky, I. Vehicle Velocity Prediction and Energy Management Strategy Part 2: Integration of Machine Learning Vehicle Velocity Prediction with Optimal Energy Management to Improve Fuel. SAE Tech. Pap. 2019.
- Liu, K.; Asher, Z.; Gong, X.; Huang, M.; Kolmanovsky, I. Vehicle velocity prediction and energy management strategy part 1: Deterministic and stochastic vehicle velocity prediction using machine learning. SAE Tech. Pap. 2019.
- Olabiyi, O.; Martinson, E.; Chintalapudi, V.; Guo, R. Driver Action Prediction Using Deep (Bidirectional) Recurrent Neural Network. arXiv 2017, arXiv:1706.02257.
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217.
- Li, Y.; Yang, J.; Song, J. Nano energy system model and nanoscale effect of graphene battery in renewable energy electric vehicle. Renew. Renew. Sustain. Energy Rev. 2017, 69, 652–663.
- Chalk, S.G.; Miller, J.F. Key challenges and recent progress in batteries, fuel cells, and hydrogen storage for clean energy systems. J. Power Sources 2006, 159, 73–80.
- Townsend, A.; Gouws, R. A Comparative Review of Lead-Acid, Lithium-Ion and Ultra-Capacitor Technologies and Their Degradation Mechanisms. Energies 2022, 15, 4930.
- Sorlei, I.-S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel Cell Electric Vehicles—A Brief Review of Current Topologies and Energy Management Strategies. Energies 2021, 14, 252.
- Lee, U.; Jeon, S.; Lee, I. Design for shared autonomous vehicle (SAV) system employing electrified vehicles: Comparison of battery electric vehicles (BEVs) and fuel cell electric vehicles (FCEVs). Clean. Eng. Technol. 2022, 8, 100505.
- Khalaf, P.; Richter, H. Trajectory Optimization of Robots with Regenerative Drive Systems: Numerical and Experimental Results. IEEE Trans. Robot. 2020, 36, 501–516.
- Hydrogen Fuel Cell Car|Toyota Mirai. Available online: https://ssl.toyota.com/mirai/fcv.html (accessed on 13 October 2022).
- Chen, J.; Nguyen, M.-K.; Yao, Z.; Wang, C.; Gao, L.; Hu, G. DC-DC Converters for Transportation Electrification: Topologies, Control, and Future Challenges. IEEE Electrif. Mag. 2021, 9, 10–22.
- Yao, L.; Lim, W.H.; Tsai, T.S. A Real-Time Charging Scheme for Demand Response in Electric Vehicle Parking Station. IEEE Trans. Smart Grid 2017, 8, 52–62.
- Hussain, M.T.; Sulaiman, N.B.; Hussain, M.S.; Jabir, M. Optimal Management strategies to solve issues of grid having Electric Vehicles (EV): A review. J. Energy Storage 2021, 33, 102114.
- Ireshika, M.A.S.T.; Rheinberger, K.; Lliuyacc-Blas, R.; Kolhe, M.L.; Preißinger, M.; Kepplinger, P. Optimal power tracking for autonomous demand side management of electric vehicles. Journal of Energy Storage 2022, 52, 104917.
- Nimalsiri, N.; Smith, D.; Ratnam, E.; Mediwaththe, C.; Halgamuge, S. A decentralized electric vehicle charge scheduling scheme for tracking power profiles. In Proceedings of the 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; pp. 1–5.
- Faessler, B.; Schuler, M.; Preißinger, M.; Kepplinger, P. Battery storage systems as grid-balancing measure in low-voltage distribution grids with distributed generation. Energies 2017, 10, 2161.
- Ireshika, M.A.S.T.; Preissinger, M.; Kepplinger, P. Autonomous demand side management of electric vehicles in a distribution grid. In Proceedings of the 2019 7th International Youth Conference on Energy (IYCE), Bled, Slovenia, 3–6 July 2019; pp. 1–6.
- Rheinberger, K.; Kepplinger, P.; Preißinger, M. Flexibility control in autonomous demand response by optimal power tracking. Energies 2021, 14, 3568.
- Bhargavi, K.M.; Jayalaksmi, N.S.; Malagi, S.; Jadoun, V.K. Integration of plug-in electric vehicles in smart grid: A review. In Proceedings of the 2020 International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 28–29 February 2020; pp. 214–219.
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63.
- Machura, P.; Li, Q. A critical review on wireless charging for electric vehicles. Renew. Sustain. Energy Rev. 2019, 104, 209–234.
- Townsend, A.; Jiya, I.N.; Martinson, C.; Bessarabov, D.; Gouws, R. A comprehensive review of energy sources for unmanned aerial vehicles, their shortfalls and opportunities for improvements. Heliyon 2020, 6, e05285.
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy consumption in unmanned aerial vehicles: A review of energy consumption models and their relation to the UAV routing. Adv. Intell. Syst. Comput. 2019, 853, 173–184.
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive energy consumption model for unmanned aerial vehicles. IEEE Access 2018, 6, 58383–58394.
- Beigi, P.; Rajabi, M.S.; Aghakhani, S. An Overview of Drone Energy Consumption Factors and Models. arXiv 2022, arXiv:2206.10775.
- Aiello, G.; Inguanta, R.; D’angelo, G.; Venticinque, M. Energy Consumption Model of Aerial Urban Logistic Infrastructures. Energies 2021, 14, 5998.
- Rodrigues, T.A.; Patrikar, J.; Oliveira, N.L.; Matthews, H.S.; Scherer, S.; Samaras, C. Drone flight data reveal energy and greenhouse gas emissions savings for very small package delivery. Patterns 2022, 3, 100569.
- Czachórski, T.; Gelenbe, E.; Kuaban, G.S.; Marek, D. Optimizing Energy Usage for an Electric Drone. Commun. Comput. Inf. Sci. 2022, 1596, 61–75.
- Shivgan, R.; Dong, Z. Energy-Efficient Drone Coverage Path Planning using Genetic Algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020.
- Chen, Y.; Baek, D.; Bocca, A.; Macii, A.; Macii, E.; Poncino, M. A case for a battery-aware model of drone energy consumption. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), Turino, Italy, 7–11 October 2018.
- Farid, G.; Hongwei, M.; Ali, S.M.; Liwei, Q. A Review on Linear and Nonlinear Control Techniques for Position and Attitude Control of A Quadrotor. Mechatron. Syst. Control 2017, 45, 43–57.

