Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Fouad Agramelal | -- | 16215 | 2023-11-06 17:59:19 | | | |
| 2 | Camila Xu | Meta information modification | 16215 | 2023-11-07 02:21:01 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Agramelal, F.; Sadik, M.; Moubarak, Y.; Abouzahir, S. Smart Street Light Control. Encyclopedia. Available online: https://encyclopedia.pub/entry/51208 (accessed on 17 July 2026).
Agramelal F, Sadik M, Moubarak Y, Abouzahir S. Smart Street Light Control. Encyclopedia. Available at: https://encyclopedia.pub/entry/51208. Accessed July 17, 2026.
Agramelal, Fouad, Mohamed Sadik, Youssef Moubarak, Saad Abouzahir. "Smart Street Light Control" Encyclopedia, https://encyclopedia.pub/entry/51208 (accessed July 17, 2026).
Agramelal, F., Sadik, M., Moubarak, Y., & Abouzahir, S. (2023, November 06). Smart Street Light Control. In Encyclopedia. https://encyclopedia.pub/entry/51208
Agramelal, Fouad, et al. "Smart Street Light Control." Encyclopedia. Web. 06 November, 2023.
Copy Citation
A smart streetlight (SSL) is defined as a LED-equipped lighting system that can monitor and control lighting based on environmental conditions. It is part of a network-based system, capable of sending and receiving data, and features sensors and actuators for various functions like traffic and light sensing, environmental monitoring, and more.
smart streetlight
deep learning
artificial intelligence
smart control
YOLO
LSTM
Computer Vision
Fuzzy logic
1. Introduction
Due to the ongoing trend of urbanization, around 4.4 billion people inhabit cities globally [1]. Although cities serve as hubs of innovation and economic advancement, they are also accountable for nearly 70% of the world’s energy usage and make a substantial contribution to global carbon emissions [2], leading to increased energy consumption and air pollution. Streetlights, a cornerstone of urban infrastructure, play a vital role in large cities, roads, villages, and various open spaces. Properly illuminated streets and public spaces can create a safer and more inviting environment for people to engage in various nighttime activities. They also enhance the feeling of safety and help reduce accidents, in contrast to areas lacking proper illumination [3].
By the end of the present decade, reports state that 360 million streetlights will be installed globally. At present, these lighting systems contribute to 15% of the world’s energy demand [4]. For example, in the United States, streetlights alone consume 14 TWh of energy annually [5]. Furthermore, to ensure the effective functioning of these systems, municipalities allocate over 40% of their budgets to public lighting maintenance. This substantial energy consumption of streetlights can be attributed to several factors. These include the use of inefficient high-intensity discharge (HID) lamps instead of newer generation of LED lamps, unmetered power consumption and power leaks where municipalities are charged a fixed energy fee, and inefficient light control that keeps lamps fully on even when there is no demand for light. Thus, the need for smart and sustainable management of this resource is clear.
A smart streetlight (SSL) is defined as a LED-equipped lighting system that can monitor and control lighting based on environmental conditions [6]. It is part of a network-based system, capable of sending and receiving data [7], and features sensors and actuators for various functions like traffic and light sensing, environmental monitoring, and more. These lights communicate through advanced systems and share data with a central system to regulate urban activities [8].
2. Hardware Related Components to Streetlamps
A streetlamp luminaire is mainly composed of a lamp, a light controller, sensors, a communication module, and a power supply. It may also include devices such as charging ports, WiFi hotspot and other auxiliary devices.
The light controller (LC), acts as the central processing unit of a SL, endowed with varying computing capabilities. It processes and transmits data from integrated IoT sensors, receives commands from a central control, manages the lamp’s brightness by regulating power supply, and continuously monitors the luminaire’s condition and electrical parameters [9]. The LC communicates with the power supply either through an analogue 0–10V signal or through Digital Addressable Lighting Interface (DALI).
The communication module part facilitates a bidirectional exchange of information among SLs and between SLs and the control center. Communication networks for this purpose can be broadly classified into two main categories, namely wireless and wired.
Wireless communication in SLs often uses Wireless Sensor Networks (WSNs) to facilitate data transmission and reception. Various communication protocols such as Zigbee, LoRa, Wi-Fi, or GPRS can be employed within WSNs to ensure communication between the lamps and the control center, each offering different ranges, data rates, and energy consumption characteristics. Wired communication networks use physical cables to connect between SLs and the control center. Common wired technologies include Power Line Communication (PLC) and Ethernet, which facilitate the transmission of data over electrical cables or dedicated data cables, respectively.
2.1. Used Lamps Technologies in Streetlights
Lamps can be broadly categorized into high-intensity discharge, and solid-state light lamps.
HID lamps generally require a warm-up time to achieve nominal temperature and maintain the discharge arc. Additionally, when switched off, a cool-down time referred to as re-strike time is necessary before the lamps can be turned on again. This re-strike time helps prevent damage to the lamp and ensures that it operates correctly. Furthermore, these lamps initially operate at full power and can only be dimmed after a time delay varying with lamp type. There exist various types of HID lamps either operating at high or low pressure. Low-pressure sodium (LPS), and high-pressure mercury (HPM) lamps were initially used for road and residential lighting, respectively, due to their distinct light colors [10]. Fluorescent lamps, preferred for moderate illumination, and Metal Halide (MH) lamps, known for excellent color rendering, were also introduced. High-pressure sodium (HPS) lamps, are prevalent in road lighting due to their high luminous output, efficacy, and longevity [11]. However, they have a low color rendering index and still require 3 to 4 min of warm-up time to reach full output [12][13]. For dimming, they can be reduced to 50% of their light output, commonly achieved by lowering the voltage amplitude or adjusting the phase angle, but certain thresholds must be maintained to ensure proper function [14][15].
LEDs are a form of solid-state lighting where light is emitted as electrons transition between energy levels within a semiconductor under an applied voltage. These LEDs are versatile, can offer very high efficacy, do not require any warm-up or cool-down time, and have a lifespan of up to 100,000 h. They allow for extensive customization in terms of shape, correlated color temperature (CCT), and spectral power distribution. Despite their higher initial costs and sensitivity to heat, LEDs are renowned for their energy efficiency, high Color Rendering Index (CRI), and adaptability, making them a prevalent choice in modern lighting solutions [10][14][16].
2.2. Sensor Overview
The effective control of modern SLs involves a wide range of sensors. These include light sensors, traffic detection sensors, electrical metering, and sensors that can assess various environmental parameters.
-
Traffic sensors can be categorized into intrusive and non-intrusive types. These sensors allow traffic count, speed measurement, and even traffic classification. Non-intrusive sensors such as active IR emit infrared beams to monitor traffic, counting each interruption of the beam as a vehicle passes. Light-dependent resistors (LDRs), photodiodes and passive infrared (PIR) sensors detect traffic by responding to changes in light intensity or infrared radiation. Doppler-based sensors, like radar, ultrasonic, or LiDAR, can detect vehicles and determine their speeds. Video sensors on the other hand can cover a wide area to detect, count and classify road users through image processing. Intrusive sensors include inductive loops, and piezoelectric sensors which can identify and differentiate various road users based on the applied pressure.
-
The light sensor in a SSL system measures ambient light, assesses SL degradation, and can serve as closed-loop feedback to the controller for system optimization. Cost-effective light sensors like LDRs, photodiodes, and phototransistors detect light changes and measure illuminance, which represents the amount of light falling on a surface area. Lux meters are specialized instruments for precise illuminance measurements. Some applications use photo-voltaic (PV) panels, but they are less common due to their lower resolution, and response time compared to photodiodes. Cameras, particularly CCD cameras due to their high sensitivity, can extract various types of information including luminance, representing the reflected light intensity as perceived by the human eye. Some applications even utilize low-resolution cameras as lux meters, employing a series of image processing and calibration techniques [17].
-
Power metering sensors in SSL control, such as current, voltage, wattmeters and so on, enable fault detection like short circuits or voltage fluctuations. Regular assessment of these power parameters ensures accurate billing for energy usage and system reliability.
-
Environmental sensors equipped on SLs enable adaptive lighting control in response to various weather conditions and can also serve as urban weather and pollution monitors. These sensors include devices for measuring temperature, rain, humidity, and air quality, such as carbon monoxide (CO) and nitrogen monoxide detectors, among others.
3. Lighting Profiles
Lighting profiles or light schemes refer to various patterns and dimming levels, viewed from a spatial-temporal perspective. SLs can be individually controlled—turned on, dimmed, or turned off—regardless of the state of other lamps, or managed as a group. These control patterns take into account several lighting parameters, including usefulness to road users, application type, lighting regulations, luminaire types, traffic flow, weather conditions, and others.
-
Conventional scheme: this is the conventional method where SLs are switched fully ON during sunset, and switched OFF during sunrise, usually by the means of an astronomical clock. The lighting level stays at its maximum during the whole night.
-
Part night: in this lighting category, streetlights are programmed to operate at predefined lighting levels during designated periods of the night. The lamps can be fully turned ON or OFF [18], or set to a specific lighting level as depicted in Figure 1c. This schedule is often determined by either prevailing traffic conditions or the unique requirements of certain locations or applications. For example, in rural areas, parks, or highways with low traffic volume during the night, a modified schedule may be implemented. Another example is how UK city councils sometimes adopt part-night lighting systems, particularly in residential areas, to optimize energy usage and meet local needs [19].
-
Two steps control: in this category, the lighting level is altered between two predetermined states: either ON and OFF, or between a high and low brightness level as shown in Figure 2a. The ON/OFF method is suitable for non-dimmable lamps, provided that the warm-up time is respected [20]. While this approach offers the most significant energy savings by eliminating electricity consumption, it also negates the primary purpose of SLs: enhancing safety and enabling nocturnal activities. Additionally, the abrupt transition from ON to OFF may look unusual to road users. In contrast, maintaining a low light level ensures the uninterrupted operation of various road services at night, such as surveillance cameras, while preserving a city’s aesthetic appeal. This two-state control system has several benefits, including less complex control mechanisms and no significant reduction in lamp lifespan, as only two lighting levels are used [21].
-
Class or step dimming: this scheme adjusts light intensity based on predefined steps or road lighting classes. In the literature, authors may describe light levels in terms of brightness or dimming percentages Figure 2b. These percentages can either correspond to arbitrarily predefined steps or to specific, standardized lighting classes. These classes are determined based on factors such as road type, speed limit, and surrounding area. Three common lighting classes are M for motorists, P for pedestrians, and C for conflict areas. Before the introduction of the CIE 115:2010 standard [22], these classes were determined subjectively. However, CIE 115:2010 revolutionized the calculation of lighting classes by introducing adaptive lighting and an arithmetic approach for quantifying lighting parameters. Subsequent standards, such as CEN/TR 13201-1:2014 [23], have adopted the CIE 115:2010 framework to simplify lighting classes and improve efficiency. It is worth noting that changes in light levels typically occur within sub-classes rather than between different classes. For instance, a change from subclass M5 to M6 could occur if a time-dependent lighting parameter changes.
-
Freely controlled: several works in the literature employ imprecise dimming levels to adjust the luminosity of SLs, without considering road type or regulatory guidelines. This approach allows for stepless lighting adjustments, usually calculated based on a range of lighting parameters. While energy-efficient, the practical utility of this scheme is often questioned due to its imprecise lower bound for illumination. In certain scenarios, the dimming level may be so low that the lamp appears nonfunctional. However, recent developments have addressed this issue. For example, a study by Neveen et al. [24] introduced a continuous lighting range that spans from the lowest to the highest sub-lighting class categories. This modified algorithm outputs lighting class values on a continuous scale, rather than in discrete steps. As a result, it ensures adequate illumination by adhering to the minimum levels prescribed by regulations.
-
Correlated Color Temperature (CCT) control: this control method refers to the ability to adjust the color appearance of a light source, measured in Kelvins (K), to suit specific lighting conditions. The CCT of a light source not only influences visual comfort and color perception but also can affect human circadian rhythms. Lower CCT values, typically between 3000 K and 4000 K, are recommended for residential areas as they create a warm atmosphere and improve visibility in foggy conditions as shown in Figure 1d. Studies suggest that lower CCTs offer longer visibility distances [25], and better dark adaptation [16], and are less likely to contribute to light pollution. However, they may result in a lower Color Rendering Index (CRI). Conversely, higher CCT values, ranging from 5000 K to 6000 K, are suggested for roadways and outdoor areas as they enhance visibility and safety [26], especially in clear conditions, and can improve facial recognition and facilitate nighttime activities [27]. Despite these benefits, high CCT values can increase glare and light pollution. This method of control is still under development and research to optimize both performance and energy efficiency in lighting systems.
-
Group or individual control: this method offers two approaches for adjusting the luminosity of SLs. Individual control allows for the adjustment of each lamp’s brightness irrespective of the state of other lamps. This scheme is particularly useful for spatial alterations of ON and OFF states, as demonstrated by Chung et al. [28] for example, every second or third lamp in a sequence may be turned OFF. While energy-efficient to some extent, this approach can result in uneven light distribution, causing dark patches on the road. Conversely, group control involves adjusting a set of lamps simultaneously, either uniformly or with varying light levels. This ensures a more consistent light distribution or smoother light transitions across a specific section of the roadway. A ‘section’ refers to a portion of a roadway with similar characteristics, such as road width and the number of lanes, as defined in EN 13201 [23]. Separate lane control is a form of group control, as it involves adjusting lamps in each lane based on its distinct characteristics.
-
Zoning (surrounding dimming profile): given that the primary users of roads are moving objects, namely pedestrians and motorists, several experiments have employed a moving light system that adapts to the pathway of the road user.
For pedestrians, an effective SL enhances safety, aids in obstacle avoidance, and facilitates facial recognition. As reported by Haans et al. [29], pedestrians feel safer with a descending light distribution. In this scheme, the nearest SL to the pedestrian emits the brightest light, while those farther away gradually dim Figure 1b. The number of functioning SLs is subject to optimization, influenced by factors such as the distance between SLs and the preferred illumination radius for navigation and identification.
From a motorist’s perspective, the primary concern is detecting hazards beyond the illumination provided by headlights. Lau et al. [30]. suggest that higher average luminance and uniformity improve motorists’ ability to detect danger. Therefore, a fading dimming profile is ineffective for motorists, and rear lamps are also irrelevant in this context. Instead, a flat lighting scheme, where distant SLs provide equal brightness to the nearest ones, is applied as depicted in Figure 1a. The number of functioning SLs, depends primarily on the motorist’s speed, and distance between each SL. An added benefit of this scheme is its ability to slow down speeding vehicles [20]. However, this approach requires precise speed measurement and accurate object detection. Further discussions on this topic can be found in the computational section.
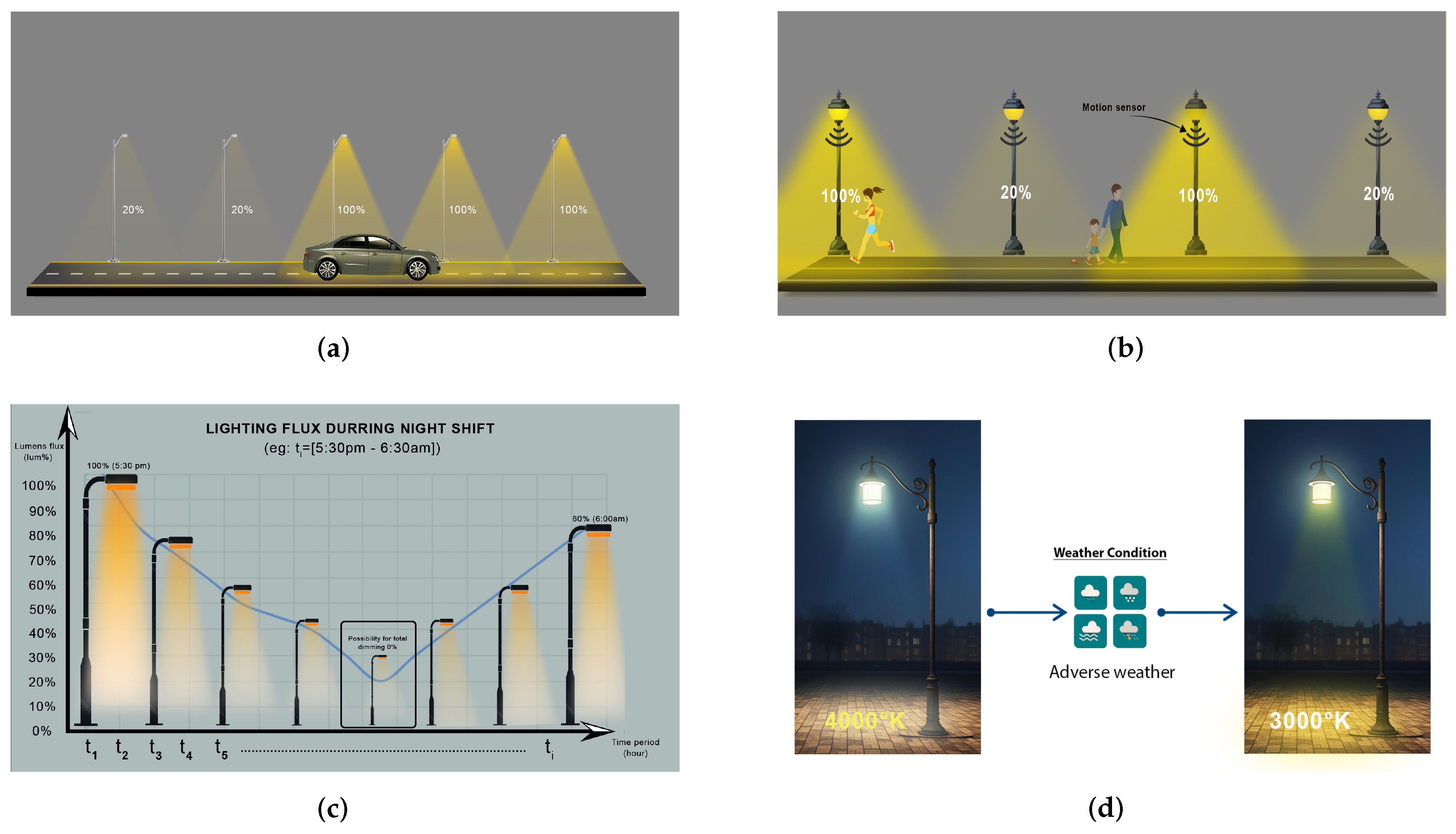
Figure 1. Different light schemes: (a) zoning light scheme for cars; (b) zoning light scheme for pedestrians; (c) part-night (d) correlated color temperature control.
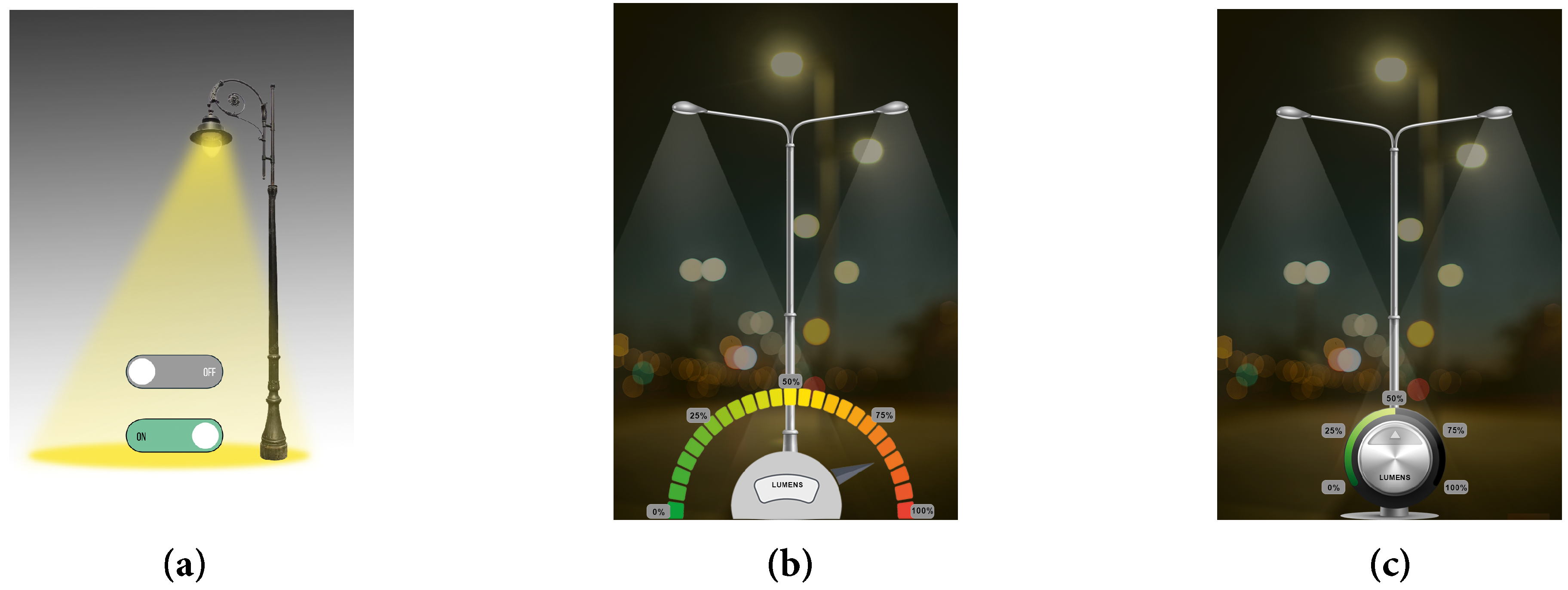
Figure 2. Different light schemes: (a) two-step control; (b) step dimming; (c) freely controlled.
4. Static Control Methods
In a static control system, lights are programmed to maintain a constant brightness level at specified times and locations, using timetables, and regardless of fluctuations in weather, traffic, or other environmental conditions. In the literature, this type of control is commonly referred to as pre-defined regulation, or time-based traffic control [6][19]. The brightness levels are assigned based on an offline assessment of the average traffic and weather patterns over time and space [31].
This control approach, mainly used with HID lamps, is largely based on the part-night scheme. While also, due to limitations like warm-up and cool-down times, several control options are excluded. Chung et al. [28], operated HID lamps at full brightness for the first twenty minutes to reach steady-state temperature, before dimming can be applied. In a related study [32], the authors claimed that using 70% of the lamps’ nominal output during warm-up is sufficient to maintain arc stability, then other dimming levels are enabled. By adopting these strategies, a reliable and stable operation is ensured, while minimizing disruptions to the grid caused by excessive demand for electricity.
Typically, in a static control method, two light levels are used. The first one involves a higher lighting level activated during the first half of the night. The second one is a lower light level and is mostly activated during the other half. The specific time to switch between the two levels depends on the observed traffic in the controlled area [7][33][34]. As user activity decreases during the night, further downgrading steps are added [35]. Then, in the early morning light level is increased again [28][32][36]. The employed sensors are not used for the control itself, but mainly to monitor electric consumption and the environment, aiding municipalities in reducing electricity bills and facilitating the switch to energy-efficient LED lamps [37][38][39].
As discussed before, LED lamps consume less energy than HID lamps. Even non-regulated LED lamps remain more energy-efficient compared to regulated HID lamps [19]. A slight difference may appear during winter, where non-regulated LED lamps consume more energy due to longer operating times [35]. Other trends use the mesopic vision in conjunction with LED lamps. Mesopic vision refers to the intermediate lighting levels between daylight and complete darkness, activating both the rods and cones in the eye. It enables seeing in low-light conditions, blending luminances from bright sources like car headlights and dim areas like distant roads [14]. According to MB Kostic et al. [40], LED lamps provide lower photopic luminance than HPS lamps, when their mesopic luminances are equal. The conversion to the photopic range is necessary, because road lighting regulations use photopic vision properties for design. For this purpose, the CIE standard defines a luminous efficiency function to convert between photopic and mesopic luminances. Studies suggest that aligning road lighting standards with mesopic vision, especially when using LED lamps, results in enhanced energy efficiency [41][42]. However, the effectiveness of street lighting while using mesopic vision is still under investigation, as some reports [43] state that respondents prefer LED lamps in a photopic regime.
It is also worth noting that few references use static control in conjunction with stand-alone SLs, as energy efficiency in this case is marginal due to driver losses [37], and it may not meet energy needs during the winter [44].
The energy efficiency of static control depends on the applied light scheme. It was shown that the largest energy savings were reported by adopting a part-time ON/OFF approach, particularly in zones with low frequencies of users such as parks or university campuses [33][34]. Overall, this control strategy has several advantages, including low implementation costs as no permanent sensor equipment needs to be installed on roads. In comparison to adaptive control, the control algorithm is less complex. Among the disadvantages, this method is not responsive to weather changes or traffic jams, plus the security and the effectiveness of other security measures can drop in low light levels. For example, with CCTV surveillance cameras [19], there can also be a risk of providing insufficient light if some unexpected traffic variation occurs [45]. Table 1 presents an overview of selected papers adopting a static control scheme.
Table 1. Related works on control methods employing a static control strategy.
| Paper | Energy Source | Used Sensors | Used Lamps | System Implementation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|
| [41] | Grid | None | LED | Real implementation | Part night + step dimming | 15% energy reduction when using mesopic vision and class dimming |
| [37] | Solar with PV | Electrical metering | LED | Real implementation in a refugee camp | Part night | Unspecified |
| [32] | Grid | None | HID | Real implementation in Cordoba, south Spain | Part night + step dimming | From 30% to 40% |
| [33] | Grid | None | HPS | Installed on a University campus | Part night + two steps | 36% reduction |
| [38] | Grid | Acoustic; presence; air quality | LED with different colors | Simulations | Part night | 15% |
| [46] | Grid | None | LED | Simulations | Part night + step dimming | 67% |
| [34] | Grid | Light | HPS and LED | Installed on a University campus | Part night + two steps + step dimming | First scenario: 50%; second scenario: 30%; third scenario: 40%; fourth scenario: 60% |
| [19] | Grid | None | LED and HPS | Simulations | Part night on HPS lamps conventional scheme on LED lamps | 21% energy saving with part-night (HPS)44% energy savings using LED |
| [39] | Grid | None | LED and Induction lamps | Pilot project in Jakarta | Part night | 38% reduction just by replacing lamps56% by using static control |
| [6] | Grid | None | LED | Pilot project in Rome, Italy | Part night + step dimming | 37% reduction |
| [35] | Grid | None | LED and HPS | Case study | Part night + step dimming | 46% reduction with part-time HPS 66% reduction with part-time LED |
| [28] | Grid | None | HID | Real Implementation in Heshan city, china | Part night + step dimming | 27% |
| [7] | Grid | None | HPS and LED | Pilot site on a university campus | Conventional scheme + two steps | 40% |
| [42] | Grid | None | HPS and LED and MH | Simulations | Conventional scheme | 62% savings using LED against HPS and MH |
| [36] | Grid | Power metering | HPS | Real implementation in a university in Turkey | Step dimming + group controlled | 24.1 yearly energy savings |
5. Dynamic Control
5.1. Simple Rule-Based Control
Rule-based methods manage SLs using simplistic procedures and minimal computing, utilizing sensor readings and basic computing units [7][47][48][49][50][51]. For instance, motion sensors adjust SL brightness based on detected activity, optimizing illumination levels and allowing for the complete switch-off of lamps, particularly battery-powered ones.
Optimizing the ON/OFF timing of lamps is essential. Astronomical clocks, which operate based on predetermined sunrise and sunset times, do not account for ambient light variations due to weather. In contrast, light sensors and solar panels actively monitor ambient light, enabling more precise control over lamp operations [52][53][54][55]. This approach saves more energy and reduces operating times, especially in winter. Other methods consider factors such as lighting class and visibility, or maintain consistent illumination levels during specific times [56][57].
The number of installed sensors on SLs depends on the application, site type, and communication technology. Sensors can be selectively placed on strategic lamps or installed on each lamp. The selective placement follows a hierarchical approach where a sensor-equipped head lamp controls a group, adjusting brightness based on road user presence and reverting to minimum brightness or turning off when the user leaves. This method involves simplistic control procedures, where the duration of time for road users to leave the corresponding section is either estimated or based on simple calculations, as illustrated in studies like [58]. This approach is cost-effective and suitable for sites with predictable road user trajectories [49]. However, it relies heavily on sensor accuracy, necessitating careful sensor selection or combined sensor methods to minimize detection errors, for example the use of Doppler, microwave, a combination PIR and light sensors, or cameras [20][58][59][60]. Furthermore, this method may compromise safety and in some cases consume more energy if the number of lamps in a group is not optimized.
The method where all lamps are equipped with sensors allows for either a hierarchical or decentralized method of control. This approach enables the application of more light schemes. For instance, vehicles can be detected at each SL, allowing light intensity to increase in accordance with the vehicle’s journey [52]. This creates what is referred to as a zoning light scheme, giving a perception of continuous lighting. In this scheme, brightness adjusts based on user presence, turning lamps ON as users approach and dimming them afterwards [59][61][62][63]. The optimization of this light scheme can be furthered by measuring speed, such as calculating the average speed between two IR sensors, allowing for the categorization of road users and the application of suitable zoning light profiles [64].
Other studies have explored a combination of static and dynamic control methods. For example, some applied full rated power during the first half of the night, transitioning to detection-enabled control later on, adjusting light levels based on detection and rain [55][65]. Another approach set predefined light levels for specific times throughout the night, using motion sensors to trigger full brightness when necessary, ensuring a blend of static and adaptive control for enhanced safety [66]. Economic analysis demonstrated low payback periods and a promising internal return rate [67]. However, in terms of energy consumption, some cases exceeded the static control scheme due to maintaining high light levels, especially in busy roads [68]. This highlights the importance of balancing energy efficiency with safety in SL systems. Table 2 presents an overview of selected papers adopting simplistic rule-based methods.
Table 2. Related works on control methods employing rule-based methods.
| Paper | Energy Source | Used Sensors | Used Lamps | System Implementation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|
| [63] | Grid | LDR; proximity; ultra sonic | LED | Prototype + simulations | Group control + two steps | Unspecified |
| [52] | Grid | PIR; LDR; current and voltage sensors; | LED | Small prototype | Zoning | 43% |
| [47] | Grid | Infrared; light; electrical metering | Unspecified | Real implementation in Xiasha district, China | Two steps + individual control | Unspecified |
| [66] | Grid | PIR; LDR; humidity; fire sensor | LED | Simulations | Part night + step dimming | 20% |
| [68] | Grid | Motion; illumination; current sensor; voltage sensor; GPS | HPS | Implemented on a university campus | Part night + step dimming + group control | 13 KWh annual savings |
| [54] | Solar PV | PV panel as a sensor | LED | Simulations + prototype | Part night + step dimming | Unspecified |
| [62] | Grid | Motion; LDR | LED | None | Zoning + step dimming | Unspecified |
| [64] | Grid | Infrared; LDR | LED | Simulation + Prototypes | Zoning | 42% |
| [67] | Grid | Luminosity; presence sensors | LED | Simulations | Part night + two levels | Unspecified |
| [7] | Grid | Infrared | LED | Implementation in pilot sites | Part night + step dimming | 70% |
| [49] | Solar PV | PIR; light sensor; electrical metering | LED and HPM | Implemented in a rural area | Two steps + individual control | 90% against grid powered HPM |
| [57] | Solar PV | PIR; light; electrical metering | LED | Implemented in a crossroad in a rural area | Two steps + group control | From 220 KWh to 67 KWh annually |
| [50] | Grid | Camera; air quality; PIR; LDR; power sensor | LED | Simulation | Two steps | Unspecified |
| [51] | Grid | Infrared; voltage sensor | LED | Small prototype | Two steps | 45% on weekdays and 32% on weekends |
| [65] | Grid | Camera; rain sensor; vehicle counter; power meters | LED | Prototype | Part night + step dimming | From 29% to 77%, depending on the implemented zone |
| [55] | Grid | Motion; light | LED | None | Part night + two steps | 17% using only light sensor, 20% with motion sensor and up to 33% using both sensors. |
| [48] | Solar PV | Motion | LED | None | Two steps + group control | Unspecified |
| [61] | Grid | Brightness; motion | LED | None | Two steps | None |
| [20] | Grid | PIR; light | LED and HPS | Simulations | Zoning | Payback time estimation |
| [58] | Grid | Microwave Doppler sensor | HPS | Installed a prototype on a university campus | Group controlled + two steps | 37% |
5.2. Web-Based Control
By leveraging the availability of public data through the use of web APIs in conjunction with installed sensors on SLs, these systems are capable of gathering comprehensive, real-time information across expansive geographic areas, surpassing limitations associated using locally installed sensors alone. To address changes in weather conditions, both Satrya et al. [69], and Daeley et al. [70], integrated micro-services into the SL monitoring and control system to obtain real-time weather data. Leveraging this data, Satrya et al. [69], proposed the adjustment of LED lamps from a CCT value of 5000 K to 3000 K during adverse weather conditions. On the other hand, Daeley et al. [70], considered both brightness and CCT control in foggy conditions. The transition in CCT for SLs was automated on the Streetlight Web server side, with a proposal to use two LED arrays, one at 3000 K and another at 5000 K, in each SL. According to Rami et al. [71], integrating these two factors could yield additional energy savings. However, these models did not take into account changes in traffic flow while making brightness adjustments.
Expanding on this concept, the authors of [72] present an intelligent control framework for smart streetlights based on weather and traffic density data obtained through APIs, along with demand response signals. The framework optimizes streetlight usage by dynamically adjusting lights based on demand response signals, considering cloud cover, visibility, and traffic density. The algorithm is executed twice daily, targeting peak electrical demand periods. It incorporates additional factors like jam levels, road priorities, and demand response requests. Results demonstrate successful satisfaction of demand response requirements, contingent on visibility and cloud cover conditions.
Addressing sensor inaccuracies is crucial to prevent unnecessary energy expenditure or safety risks in SLs systems. Zhang et al. [73], tackles this issue by introducing a voting mechanism within a WSN-based SL system. Within this setup, the decision to either activate or deactivate a cluster of lamps is determined by a lamp leader. This leader assesses the voting results based on the readings from each SL’s installed light sensor. If the count exceeds a predefined threshold, the leader issues a command to switch on the lights; if it falls short, a command to switch off is sent. This voting strategy ensures control decisions are reached based on the agreement of multiple sensors. In another study, He Meng et al. [74], mitigates sensor inaccuracies through multi-sensor information fusion, using an average value fusion algorithm. This strategy gives equal importance to all sensors, thereby reducing the effect of individual faulty readings. The unified sensor data informs the control terminal, which regulates the lighting accordingly. This approach has demonstrated substantial power savings, emphasizing the effectiveness of techniques designed to counter sensor inaccuracies; other techniques relying on fuzzy logic to deal with sensor inaccuracies are discussed in another section.
Moving beyond individual sensor inaccuracies, a more complex scenario arises when considering the light at intersections. These areas demand specific attention due to their critical role in road safety and traffic flow. To adapt drivers’ vision when approaching a lit intersection, Linhong et al. [75], proposed using transition zones to facilitate visual adaptation from dark to light. They introduced an exponential model to assess the pupil’s contraction phase during light intensity transitions, aiding in determining optimal illumination settings. This approach allowed for the design of shorter, cost-effective transition zones, varying the number of LED lamps based on speed limits. While innovative in enhancing drivers’ visual performance, the model’s reliance on speed limits instead of actual vehicle speeds could impact safety and energy efficiency. Another study, [76], aimed to optimize roadway lighting to improve drivers’ recognition distance and response time by dynamically adjusting illumination based on vehicle speed and real-time data. Using binary linear regression, their method prioritized areas where pedestrians and cyclists posed significant traffic risks, such as intersections. The study found that increased illumination improved visual recognition distance and safety at higher vehicle speeds, but it also highlighted a trade-off with energy efficiency, suggesting a need for a balanced approach in lighting optimization.
5.3. Control Strategies for Building-Adjacent Lamps
A special case emerges when SLs are incorporated into building automation control systems (BACS). These lamps, often found within gardens, walkways, residential complexes, university campuses, etc., may need to operate during daylight hours. This typically occurs in shaded areas or during cloudy conditions, where additional illumination is needed. In these situations, outdoor lighting arrangements need to align with the different efficiency classes for BACS defined by EN 15232 [77]. The research in Andrzej et al. [78], proposed functional strategies for BACS efficiency classes ‘A’ and ‘B’, exploiting various control scenarios and daylight monitoring using a lux sensor. The efficiency classes comprise advanced control functions, including automated time schedules and individual or group lamp control, as seen in class B. Moreover, class A integrates even more complex controls, maximizing daylight usage, notably by using a lux sensor to monitor daylight levels. Various control strategies corresponding to these classes were tested, focusing on different time schedules and light intensity levels. The tested strategies showed potential energy savings of up to 45% compared to conventional systems. In another study, Marina et al. [79], addressed some gaps within EN 15232 [77], particularly its omission of outdoor lighting among building services and its disregard for the latitude of the installation site. To rectify these limitations, they proposed four distinct controlling scenarios, each aligned with the efficiency classes defined by the standard. In the developed control scenarios, class A utilizes a predefined control scheme using a timer with an ON/OFF feature tied to illumination levels, while class B solely employs a predefined control scheme. Results show that class A systems generally exhibit substantial energy savings. The efficiency of the lighting system, according to the study, is influenced not just by the energy consumption of its control system, but also by the latitude of its installation. Other studies provide valuable insights without explicitly focusing on these efficiency categories. The authors of [80] developed a smart lighting system for managing lamps within university campus buildings. Utilizing a central real-time expert system and microcontrollers, lamps were categorized into groups based on factors like daylight, real-time data, and campus usage patterns. The system, comprising an inference engine and a knowledge base, used logical rules for decision-making and included a feature measuring ambient illuminance using PV cells, allowing lamps to activate outside predefined schedules if necessary. This approach achieved significant energy savings.
5.4. Traffic-Based Control
-
Simple traffic count
Leveraging traffic data for the control of SLs has emerged as a powerful strategy, as evidenced by various studies explored in this section. These methodologies span a broad spectrum, ranging from the relatively simple to the remarkably sophisticated. A basic yet effective approach entails counting vehicles, which can serve as a trigger for certain control modes. For example, In Jing et al. [81], two control scenarios were examined, when a single vehicle is detected, the measured speed is used to sequentially switch ON and OFF the lamps before and after the vehicle. In the second scenario, when multiple vehicles are counted, lamps are controlled according to the calculated time interval of the fastest and slowest vehicle in a group of vehicles.
Leveraging regulations that allow for light adjustment based on traffic count, Petritoli et al. [6] propose a Traffic Adaptive Installation (TAI) that adjusts lighting based on 15-min traffic intervals, following local regulations. The system downgrades lighting levels if traffic falls below certain thresholds, using an algorithm that considers past and current traffic flow. Lighting adjustments are made based on consecutive traffic measurements, ensuring energy efficiency. The study suggests that TAI is more energy-efficient compared to baseline controls and hints at further adaptability by considering additional environmental data. The work in [82] incorporated the measure of luminance on the road alongside the counting traffic to design a closed-loop control scheme. First, the system sets the appropriate dimming mode in accordance to the measured traffic flow, then it continuously adjusts to fluctuations in lighting conditions, maintaining constant illumination. However, this study focused only on the methodology of the control system, with no direct claim of energy savings through the use of their proposed system.
-
Parametric and non-parametric traffic models
Other studies use more advanced techniques involving traffic prediction models, which are broadly categorized into parametric and non-parametric models. Parametric models are characterized by a fixed number of parameters and limited complexity. They operate under specific statistical distributions and maintain a predetermined functional relationship between input and output variables. This feature enables them to use training data more efficiently compared to their non-parametric counterparts [83].
In response to the heterogeneity and randomness of traffic flow distributions across time intervals, Shahzad et al. [84], leveraged a probabilistic model, namely the Poisson distribution for traffic flow prediction. This parametric model was built upon VANET parameters, primarily traffic volume and vehicle speed as macroscopic factors, and vehicle headway as a microscopic factor. A chi-square test indicated a robust correlation between theoretical and predicted distributions. For a smooth transition during light changes and to avoid distracting drivers, lamps were controlled in groups. Furthermore, a minimum dimming level was maintained to ensure pedestrian safety and effective CCTV visibility.
Juntunen et al. [85], used a Kalman filter to generate tracking estimates of pedestrians moving along a one-dimensional path, based only on the detection of PIR sensors. The authors used a special PIR sensor with three detection fields which could determine the direction of pedestrian movement based on the sequence of triggering. The system was designed to continuously update and refine its tracking estimates based on new detections, improving the accuracy of the Kalman filter over time. Then, based on the estimated position and movement of pedestrians, a zoning light profile was applied where the illuminated area reaches further in front of the user than behind.
Other parametric models involve a time-series model called the Auto-regressive Integrated Moving Average models (ARIMA). In the study of Agramelal et al. [86], one of the studied forecast models is the seasonal ARIMA model, i.e., SARIMA, which contains seasonal autoregressive, differencing and moving average components to deal with seasonality in data. The model was tested against others in order to predict the upcoming hourly traffic flow on a highway to control stand-alone SLs.
Simulation models, like Cellular Automata (CA), are essential when traffic data is unavailable, such as during renovations or testing changes in road infrastructure. CA divides roads into cells, either vacant or vehicle-occupied, aiding in designing efficient lighting for various traffic situations. Nefedov et al. [87] used a CA model to simulate traffic, dividing roads into cells representing either a car or a gap. Applying Nagel-Schreckenberg rules, they generated traffic speed and vehicle gaps, using segments of eight cells between SLs for control. A zoning light profile was applied in their one-lane vehicular simulation, adjusting illumination based on speed limits. Mustafa et al. [88] found that increasing the number of cells per section, representing the distance between light poles, reduced energy savings as it decreased the chances for lamps to be turned off or dimmed due to less likelihood of sections being unoccupied by vehicles. CA models are simple yet efficient for simulating traffic, making them ideal for complex systems with limited computational resources. In SL applications, other models like multi-agent systems or Simulation of Urban Mobility (SUMO) are also used. SUMO simulates individual vehicle behaviors and interactions with road networks, considering aspects like speed and lane-changing.
Parametric models typically outperform non-parametric models when data structure assumptions are met, offering efficiency and robust results with less data. However, they may struggle to utilize additional information in large datasets and can be negatively affected by deviations from assumed functions. On the other hand, non-parametric models do not assume any specific distribution on the traffic data.
Nikolaus et al. [89] developed a quarter-hour occupancy algorithm to control SLs in a port, using data from port personnel and empirical measurements. The algorithm produced random, non-biased occupancy values, adjusting SLs power based on occupancy. The authors controlled 60% of the brightness, while 40% was maintained for safety, ensuring illumination even in the absence of people in the port. Many contemporary non-parametric models leverage artificial intelligence techniques, including decision trees, support vector machines, and deep learning models, among others. While these models adeptly capture the non-linear characteristics of traffic patterns, they do so at the expense of needing ample high-quality data and significant computational resources for training [90].
5.5. Zoning-Based Control
The core concept of a zoning control scheme revolves around accurately identifying, positioning, and measuring the speed of road users. This approach offers the potential for a more energy-efficient, safety-conscious, and user-responsive lighting system.
Atici et al. [91] and Hans et al. [29] implemented real test-beds to evaluate the influence of light on pedestrian safety and perceptions. Ascending light intensity improved feelings of safety for stationary pedestrians, while moving pedestrians preferred a descending light profile, feeling safest when the nearest lamp emitted maximum illumination that tapered off with distance. Both studies used average pedestrian speed to estimate the timing to switching between light levels, with each SL having a 20% dimming step to enhance visual comfort and account for power-line losses and errors. The exact number of lamps to control in the pedestrian vicinity was not specified in either study, as they did not employ sensory-based control. Jose Poza et al. [92] developed a simulation model to assess pedestrian lighting needs across various illumination zones, taking into account the imprecision of PIR sensors. The proposed system anticipates the future positions of pedestrians, evaluating whether the nearest SL will meet the lighting needs of pedestrians at those anticipated positions. The study utilized arrays to capture the lighting needs of pedestrians and the light intensities of SLs, facilitating a comparison to categorize the outcomes of the control algorithm. Various control strategies were examined, with efficiency assessed through various metrics such as curve analysis and the area under curve metric, ensuring a balance between power consumption and user comfort. The research indicated that using two to three preceding SLs equipped with PIR sensors for tracking pedestrian movement produced optimal results. However, the study did not employ a specific model to precisely quantify utility. Lau et al. [30] introduced a utility model to evaluate the effectiveness of lighting for pedestrians and vehicles. For pedestrians, the model considers avoidance (obstacle detection, face recognition, navigation) and prospect (preference for descending light distribution). For motorists, it assesses hazard detection and stopping capabilities, using undimmed lamps in front. Building upon the utility model, the authors introduced a controller named the Traffic-Aware Lighting Scheme Management Network (TALISMAN). This controller adjusts SL illuminance according to the needs of road users, aiming to balance between maximizing utility and conserving energy. Simulation results indicated that TALISMAN, while not always the most energy-efficient option, consistently optimizes utility for both motorists and pedestrians. Dizon et al. [18], leveraged the TALISMAN controller to assess its practical efficacy, applying real-world data within the StreetLightSim simulation tool. This simulation incorporated a road traffic model, based on the Department for Transport, which distributes annual average daily traffic flow throughout the day. The researchers studied two distinct roads in Sheffield, a residential area and a city center location. Findings indicated that TALISMAN significantly reduced energy consumption on both roads, although results may vary based on location, SL type, and road characteristics.
Both Lau et al. and Dizon et al. [18][30], used fixed speed limits, resulting in inflexible illumination profiles. These profiles often led to inefficient lighting, affecting both slower vehicles and faster emergency vehicles like ambulances and police cars. In this aspect, Knobloch et al. [93] introduced a dynamic, speed-dependent dimming profile called Light on Demand (LoD), which adjusts lighting based on the speed of individual traffic elements, such as cars and buses. The system uses an inverse Time-to-Live (TTL) approach to detect vehicle velocity and direction, considering factors like fear zone radius and stopping distance. This approach allows for significant energy savings, with optimal results at speeds around 50 km/h. Building upon the LoD system, Arben et al. [94] explored its application in non-uniform traffic distributions, influenced by real-world factors like traffic lights and pedestrian crossings. Their findings highlighted that the LoD strategy is most effective in these non-uniform traffic conditions, emphasizing its practical utility and potential for enhanced energy conservation in realistic traffic scenarios.
Previous studies on adaptive lighting systems lacked reliable techniques to distinguish between different types of road users, often resorting to the unreliable method of using speed for differentiation. Previous studies on adaptive lighting systems lacked reliable techniques to distinguish between different types of road users, often resorting to the unreliable method of using speed for differentiation. In response to this shortcoming, Yuxi et al. [95], proposed a novel solution to improve adaptive lighting systems by using received signal strengths (RSS) to distinguish between vehicles and pedestrians without extra sensors. This method utilizes the unique signal absorption and reflection properties of human bodies and vehicles, and their different dimensions and speeds, to create distinct amplitude energy attenuation patterns in wireless signals. An adaptive RSS baseline adjustment was introduced to enhance performance and resilience against environmental noise. While the system showed high accuracy in identifying road users, its robustness could be affected by close proximities between users and other moving objects like trees.
Overall, the zoning light scheme presents several advantages and challenges. It has the potential to significantly save energy by tailoring lighting based on the presence and behavior of road users, enhancing visibility and awareness for safety, and possibly restraining speeding vehicles. However, its effectiveness is most prominent with individual road users, typically during late-night hours or in areas with low traffic density. Challenges arise from complications due to mixed road user types, an issue not addressed in prior studies. Additionally, the scheme requires a sophisticated and accurate sensor network for precise detection, speed measurement, and user identification.
5.6. Cost-Effective Optimization Control
An objective function, in optimization, is a mathematical construct used to maximize or minimize a set of variables. In SL, it often aims to minimize energy consumption or installation costs while maximizing safety, operating within constraints like regulations, lamp specifications such as minimum dimming level, and control schedules. Various techniques, from exhaustive searches to genetic algorithms, are employed to solve these objective functions.
Viani et al. [96], leveraged a particle swarm optimization (PSO) algorithm to minimize a cost function aiming to find optimal dimming profiles for a set of lamps in a SSL system. By doing so, they aimed to optimize energy consumption while maintaining the desired brightness levels. The input data for the PSO included environmental brightness and energy consumption, and the output provided the best dimming profiles to meet the brightness values and energy consumption targets. After the initial setup, the system demonstrated nearly constant energy savings for two years. However, the paper notes the need for further large-scale testing in complex urban environments.
Mahoor et al. [97], employed a brute force algorithm for optimizing a cost function, with group arrangement and dimming level as primary inputs. The goal was to identify the best group of SLs to activate and determine an energy-efficient dimming level, considering local traffic data and ambient luminance. The model, updated every 30 min, aimed to manage constraints related to HID lamps and ensure uniform light distribution. Results showed that incorporating traffic data led to higher energy consumption compared to conventional lighting control, yet it still achieved notable energy savings, indicating significant potential for further energy savings by adopting LED lamps. Sutil et al. [98], employed the Artificial Bee Colony (ABC) optimization algorithm to optimize energy consumption within a university campus. Their study focused on three different zones, each conforming to a specific light subclass. The optimization focuses on minimizing the illumination level during reduction periods, while adhering to a set of constraints, including illumination levels with respect to the P subclasses, dimming levels of the MH lamps, and ensuring maximum illumination when a pedestrian enters the area covered by the SLs. Tested across various scenarios, considering academic activity and examination periods, the system demonstrated adaptability, configuration flexibility, and significant yearly energy savings.
Seeking the optimal control plan for a micro-grid photovoltaic SL installation, Kov’acs et al. [99], used a linear programming approach to optimize energy management, aiming to minimize electricity costs based on fluctuating tariffs. They designed a controller deciding on electricity buying or selling, requiring accurate forecasts of energy production and consumption, using Auto-Regressive with eXogenous inputs models. The controller’s energy flow was formulated as an LP problem to minimize the cost function, considering variables like electricity purchase and feed-in rates and battery states at each time step. Annual results showed a positive energy balance with higher energy export, emphasizing that the benefits of an intelligent lighting system depend on specific scenarios, considering traffic, weather, and energy tariffs. Tutus et al. [100], introduced the P-System Outdoor Illumination System (PSOIS), a multi-objective optimization approach aimed at maximizing illumination efficiency and luminaire lifespan while minimizing power consumption. PSOIS considers factors such as luminaire characteristics and status, installation zones, and peak and off-peak durations, and operates in four phases: registration, initialization, evaluation, and reorganization. Luminaires register with the closest local controller, which then registers with the central controller. The local controller assigns illumination modes to each luminaire based on computed luminaire fitness values, and luminaires update their configurations accordingly. Simulations showed that PSOIS is more energy-efficient compared to other evaluated methods.
Table 3 provides detailed information on light schemes and energy savings applied for the aforementioned dynamic control methods.
Table 3. Related work on control methods employing computational techniques.
| Paper | Energy Source | Used Sensors | Used Lamps | System Implementation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|
| [69][70] | Grid | Temperature; humidity; particle concentration; power meters | LED | Simulation and prototype | CCT + group controlled + step dimming | Unspecified |
| [72] | Grid | None | LED | Simulations using a real case study | Step dimming | Connectivity should be maintained at all time |
| [73] | Grid | Light sensor | Not specified | Experiments in laboratory | Group controlled + two steps (ON/OFF) | Unspecified |
| [75] | Grid | Eye-tracking glasses | LED | Simulations + indoor | Step dimming + group controlled | Unspecified |
| [76] | Grid | Road side sensors | Not specified but LED | Prototype | Step dimming, each speed corresponds to a light level | Unspecified |
| [78] | Grid | Lux; temperature; power meters | HPS | Implemented in university parking | Step dimming + part night | Up to 45% |
| [79] | Grid | Light | LED | Simulations | Step dimming | Up to 70% |
| [80] | Grid | Motion, photo-electric, pv panels | MH, HPS, LED | Implemented on a university campus | Group control + step dimming | 33% |
| [81] | Grid | Doppler sensor | LED | Installed in Luyang Avenue, Lucheng City, China | Predefined + zoning (ahead) + two steps control | Up to 19% |
| [6] | Grid | Cameras; infrared; inductive loops; | LED | Installed on a pilot street | Step dimming | 59% |
| [84] | Grid | Light sensor | LED | Installed at a university sub-street | Step dimming + group control | From 68% to 80% in winter and summer |
| [85] | Grid | Custom PIR sensor | LED | Real implementation | Zoning with two steps | From 60% to 77% |
| [87] | Grid | Vehicular sensor | LED | Simulations | Zoning + two steps | Up to 60% |
| [88] | Grid | Presence sensors | LED | Simulation | Zoning + two steps | Up to 57% |
| [89] | Grid | Photodetector; occupancy sensors | Fluorescent; LED | Simulations using a port in Greece as testbed | Step dimming + group control | 56% reduction |
| [91] | Grid | Presence sensor | LED | Prototype at a campus | Zoning | Unspecified |
| [92] | Grid | PIR | LED | Simulations | Step dimming + zoning | Unspecified |
| [30] | Grid | Light; presence sensor | LED | Simulations | Zoning + step dimming | Up to 37% |
| [18] | Grid | Traffic sensor | LED | Simulations |
|
from 12% to 94% |
| [93] | Grid | Radar; photo diodes | LED | Simulations | Zoning + two steps | Up to 60% |
| [94] | Grid | Light; motion | LED | Simulations | Zoning + two steps | Up to 52% for non-uniform traffic distribution. |
| [95] | Grid | Light sensor | LED | Implemented in a testbed | Zoning + step dimming | 90% |
| [96] | Grid | Lux meters, power meters | LED | Installed in two different test sites | Step dimming + group controlled | 30% |
| [97] | Grid | Ambient | HID lamps | Installed on a pilot street | Step dimming + group control | Between 35% and 45% |
| [98] | Grid | Motion; current; voltage | MH | Implemented for pedestrians on a campus | Zoning + group control + freely controlled | 12,165 KWh energy savings for 107 campus SLs |
| [99] | Grid + solar PV | Infrared | LED | Installed prototype at a campus | Zoning + group control + two steps | 55%, with 6043 KWh annual positive energy balance |
| [100] | Grid | Not specified | MH and LED | Simulations | Step dimming + group controlled | 37% |
5.7. Camera-Based Control
Video sensors, compared to other types, provide unique benefits such as extracting data on road user positioning, speed, object classification, and brightness. However, they require an advanced processing pipeline to manage challenges like low-light conditions, image noise, variable brightness, and mounting position. This subsection specifically addresses computer vision-driven approaches and algorithms, the AI-based methods are further discussed in the AI-based control section. Table 4 provides detailed information on light schemes and energy savings.
In the context of SLs, cameras usually function in low-brightness conditions or during nighttime. The minimum level of brightness required for a camera to operate effectively during nighttime can vary based on several factors, including the camera’s sensor, lens, and its low-light capabilities. Studies suggest various brightness levels, ranging from 10% to 50%, to optimize camera functionality in the absence of road users [101][102][103][104]. Different cameras operate effectively at varied light levels; monochrome cameras work at levels below 0.01 lux, while advanced cameras with infrared or thermal imaging operate in near or total darkness [105]. While vehicle headlights aid in detection, a minimum brightness level or advanced cameras are crucial for pedestrian detection.
Deploying video sensors on several SLs is effective but costly. Murthy et al. [101], installed cameras on each luminaire, covering a 30m–20m area for vehicle and pedestrian detection. To minimize costs, efficient techniques based on geometrical constraints are suggested, allowing cameras to cover wider areas. However, this presents challenges in positioning and speed measurement due to a lack of a unified field of view, requiring careful calibration techniques or multiple camera perspectives. Solutions include establishing a conversion ratio to standardize the field of view, using predetermined camera heights and angles, and employing camera calibration and multi-view geometry to estimate 3D information from 2D images [106]. Deep learning methods can also assist in overcoming the challenges of video sensor deployment for traffic monitoring and control.
The general steps of image processing are illustrated in Figure 3. The process begins with Image Acquisition, where video frames are captured from the camera feed. The quality and clarity of these images are paramount, and this stage often involves adjusting camera settings for optimal capture, especially in low-light conditions. The next step, Preprocessing, involves improving image quality for easier analysis. This can include noise reduction, brightness normalization, and contrast adjustment to ensure the details of interest are discernible. The third stage, Segmentation, is where the images are partitioned into regions or objects of interest. This could involve separating moving objects like vehicles or pedestrians from the static background. Feature Extraction follows, where specific attributes from the segmented objects are gathered. These features can range from basic geometric properties like size or shape, to more complex visual characteristics, like texture or color. Finally, in the Decision Making stage, the system uses the extracted features to make a determination or prediction. This might involve classifying an object, estimating speed, or determining the level of activity in a scene. Following this pipeline, the extracted information can be used to control the brightness level of the SLs, among other applications.

Figure 3. Sequential workflow of key processes in image processing.
Veena et al. [60], used an image processing method that begins with converting video into individual frames. Each frame is converted from RGB to grayscale and binarized. Contour mapping is then employed to distinguish the object from the background, with the area of the object subsequently calculated. Objects smaller than a certain area are discarded. This processing is implemented through edge computing, utilizing a Raspberry Pi and OpenCV libraries. The system, as proposed, can differentiate between pedestrians and vehicles based on the measured area. In the proposed scenario of a highway, lamps are switched on in the direction of detected vehicles, however the paper does not specify the number of lamps to be operated in front of each detected vehicle.
Gagliardi et al. [107], utilized image processing, starting with the conversion of RGB images to grayscale, followed by foreground detection using a mixture of Gaussian models for background subtraction. A binary mask is then created to distinguish objects from the background, and binary image analysis helps in detecting and identifying vehicles and pedestrians using an algebraic procedure based on the eigenface approach. However, no distinct control between pedestrians and vehicles was implemented. The study demonstrated that the system is energy-efficient compared to HPS lamps and LED installations. Higinio et al. [102], initiated their study with image acquisition, followed by filtering to enhance contrast and luminosity. Specific areas, believed to potentially contain a human figure, are identified and features such as edge, texture, or color are extracted to generate human descriptors. Classifiers and learning algorithms then discern human from non-human descriptors, controlling the SLs accordingly. Additionally, behavioral analysis techniques are suggested for predicting a person’s movements, allowing anticipatory activation of SLs along their path.
Esben et al. [105], used three thermal cameras and a Kalman filter for tracking and detecting pedestrians in a parking lot. They applied background subtraction for pedestrian detection and adjusted for scene changes. Post-processing involved binarization and coordinate mapping of detected objects. Groups of pedestrians were considered a single object, and their positions and velocities were calculated using the Kalman filter. The system was tested under various lighting scenarios, including dimmed lights, fading lights, and lights following pedestrians, to evaluate its effectiveness. Castellano et al. [104], utilized an upgraded ORB algorithm (Oriented FAST and Rotated BRIEF) for effective image feature detection in various settings. The algorithm compares the current image frame with a dynamic background that adapts to changing conditions, with an in-field tuning applied to reduce false negatives. When a vehicle is detected, an event is generated, including details like detection area, object ID, vehicle direction, and speed. The experimental setup consisted of a single detection point with ambient sensors and three vehicle-detecting cameras mounted on a SL, along with four actuation points featuring PV powered LED luminaires.
Mahmood et al. [108], used license plate detection for vehicle identification, dividing roads into zones with sensors and night cameras. When an object is detected, the camera captures an image, identifies the vehicles license plate, and activates the zones lamps. Umar et al. [108], enhanced computational efficiency by combining cameras with LiDAR sensors, focusing the detection algorithm on a LiDAR-informed Region of Interest (ROI), improving detection efficiency and accuracy. Subaie et al. [109], avoided unnecessary energy consumption by activating lamps and cameras in relevant zones upon detection, adjusting luminosity based on classification outcomes, optimizing energy usage while maintaining effective illumination.
Table 4. Related works on control methods employing cameras and computer vision.
| Paper | Energy Source | Used Sensors | Used Lamps | System Implementation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|
| [103] | Grid | IP camera | LED | University campus | Two steps | Unspecified |
| [102] | Grid | Camera | Not specified but since it is 20% min then LED lamps | Simulations | Step dimming | Up to 68% |
| [107] | Grid | Motion; camera; weather sensors; | LED | Real implementation | Step dimming + group control | 80% against HPS with no control and 70% against LED lamps |
| [105] | Grid | Thermal camera | RGB LED lamps | Real implementation | Zoning + freely controlled + group control | 90% |
| [109] | Grid | Ultrasonic; LDR; PIR | LED | Simulation | Step dimming | Unspecified |
| [108] | Solar PV | LDR; camera; PIR | LED | Simulation | Two steps + group control + zoning | 86% |
| [104] | Solar PV | Camera; illuminance; rain; temperature; humidity | LED | Prototype installed in an intersection | Step dimming + part night | 36% |
| [110] | Grid and solar PV | LDR; infrared camera | LED and HPS | Laboratory tests and simulations | Step dimming + group control | 30% |
| [60] | Grid | Camera | LED | Prototype | Zoning + two steps | Unspecified |
| [101] | Grid | Camera | LED | Implemented in a US military base | Two steps + group control | 90% energy savings vs. uncontrolled HPS lamps |
5.8. User-Driven Control
Leveraging the connectivity offered by various devices and networks, a few studies explored user interaction with SLs. Recognizing that individuals can have different lighting preferences, these approaches range from sensing the proximity of road users through their connected devices, to empowering users to communicate and interact directly with the lighting system. Most commonly, this is facilitated via smartphones, graphical user interface (GUI), touchscreens, or via emerging networks such as VANETs, specifically for vehicular users.
Mullner et al. [111], used GPS and smartphones to track pedestrian locations, enabling a zoning light profile. Pedestrians could adjust the lighting radius via an app, designed for areas with low pedestrian frequency and high crime rates. The system, incorporating LED lighting and web applications, dynamically controlled SLs based on pedestrian location. Administrators could define zones and manage lampposts through a web application, activating lamps based on user-defined safety zones and recent user location. Cho et al. [112], proposed a security lighting system that uses beacon devices, smartphones, and IR sensors to detect pedestrians, enhancing safety in lit alleys. The system activates additional lighting attached to the luminaire when a pedestrian is detected. In another study [113], a mobile application was used to control SLs, allowing authorized users to adjust brightness based on ambient light, movement, and personal preferences, and to remotely monitor the system.
Previous approaches to such systems require a subscription for use, which limits user accessibility. Additionally, relying on smartphones raises concerns about location privacy and can lead to rapid battery depletion due to constant usage of GPS, Bluetooth, and internet connectivity [114].
Other studies have emphasized the importance of Graphic User Interfaces (GUIs) in managing and controlling SL systems. Kovács et al. [99], developed a GUI that provides real-time status updates, customization of dimming levels, and system administration features, ensuring regulated access based on user roles. Dolores et al. [115], proposed a smart central management system with a map-based GUI, allowing users to manage luminaires, configure light points, and access diagnostic tools for system failures. Abarro et al. [116], offered a GUI that enables users to switch between various operational modes of the lighting system, ensuring customizable control based on specific needs. Additionally, Beccali et al. [38], used touchscreen technology to enhance visitor interactions, allowing selection from various lighting configurations and access to information, making the user experience more engaging.
Mohamed et al. [117], used Vehicular Ad-hoc Networks (VANETs) for SL control, where vehicles act as mobile nodes, enabling real-time tracking of their presence and count. They proposed two solutions: coarse-grained, involving virtual road zones controlled by Roadside Units (RSUs), and fine-grained, allowing individual SL control by their own controllers or by the RSU. VANETs offer cost-effectiveness by eliminating the need for specific networks and equipment, thereby reducing costs and accelerating system deployment. However, the study only used vehicle presence and count, leaving aspects like location, direction, and speed unexploited in SL controls.
5.9. Artificial Intelligence-Based Control
5.9.1. Artificial Neural Networks and Deep Learning
In the context of SLs control, ANNs can be used to: (1) forecast time-series data like traffic volume, weather or renewable energy production; (2) process video frames for object detection and classification; and (3) output the desired light intensity directly, based on the analyzed data. The control modes in an ANN-based system can either involve an intermediary controller to translate the ANN output into lighting adjustments or can directly set the light level without such an intermediary as depicted in Figure 4.
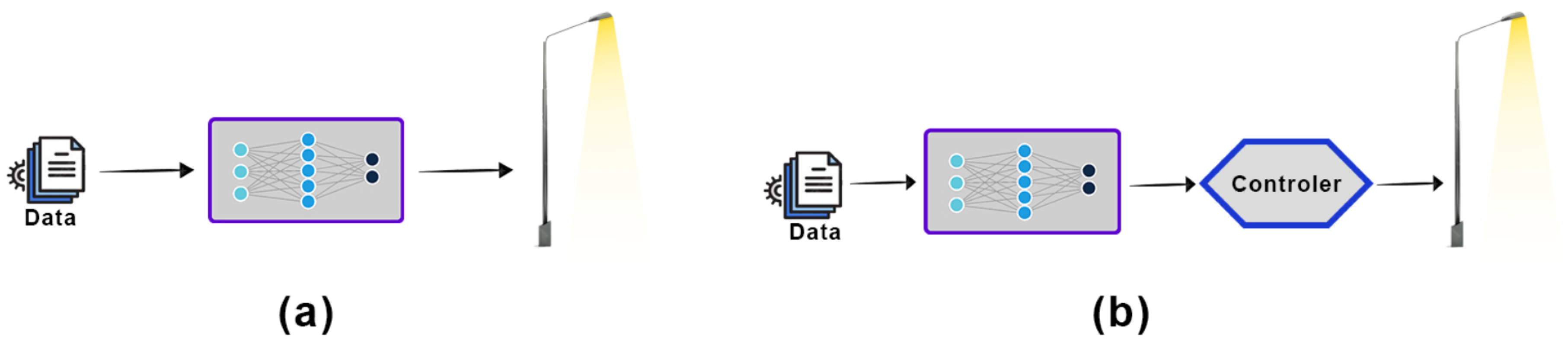
Figure 4. Control modes of an ANN-based lighting system: (a) the ANN directly outputs the light level, and (b) the ANN processes data and sends it to a lighting controller.
In their respective studies, Kolasa [118], and Smys et al. [119], proposed the use of feed-forward neural networks (FFNN) to control SLs based on meteorological data. The FFNN was utilized in two ways: prognostic functionality for generating a control plan based on meteorological data for the next 24 h, and ongoing correction functionality for continuously adjusting lighting intensity in real-time. The system featured three operational modes, determining the number of NN outputs and the level of control over the lighting units. Kolasa implemented an FFNN with an input size of nine, representing data such as date, time, and weather factors. The hidden layer contained 16 neurons, and the output size corresponded to the light intensity of a group of lamps. The choice of the number of neurons in the hidden layer was optimized through experimentation. Smys et al. [119], on the other hand, used an FFNN trained on meteorological data from various weather stations, incorporating inputs such as rain, temperature, and atmospheric pressure. The FFNN outputted the light intensity for the next 24 h. In both studies, the training process involved backpropagation with a momentum factor and continued until a minimum root mean square error was achieved.
Pragna et al. [120] used an ANN to optimize SL brightness and energy consumption, based on traffic volume and inter-distance between luminaires. The ANN, consisting of three layers, took inputs like traffic volume and inter-distance to predict energy consumption and was trained using backpropagation with a variable learning rate. The model showed improvements in terms of energy consumption compared to the work of Lau et al. [30]. However, their model incorporated a pedestrian zoning profile for vehicles, causing more energy waste by unnecessarily activating rear lamps. Additionally, their model assumed a linear relationship between dimming and power variation, which contrasts with experimental findings of non-linearity [6].
De Paz et al. [121], used an ANN to accurately model the non-linear relationship between dimming levels and power consumption in SLs. They trained two separate NNs specific to the type of luminaires, one converting dimming levels to power consumption and the other calculating light intensity based on allocated power. Their comprehensive approach also included optimization techniques such as ANOVA and expectation-maximization clustering for data analysis, and an algorithm for cost minimization while maintaining adequate luminosity. A smart server continuously adjusted the lighting schedule in real-time, ensuring optimal illumination and energy efficiency.
In all the aforementioned studies, ANN were used to directly output a variable reflecting the light level. Additionally, ANN can be employed to process data, as demonstrated in the work of Mohandas et al. [122]. In their study, an ANN was used to generate new projections for unforeseen scenarios and to process information based on SL characteristics such as height, arm length, and inter-spacing, along with data collected from motion and light sensors.
To forecast traffic flow in the upcoming hour, Pizzuti et al. [123], and Marino et al. [124], employed a basic ensemble learning model (BEM). In time-series forecasting, a set number of previous observations, known as lag or time window, are used as inputs to the Neural Network (NN) to make future predictions. The size of the time window, which is subject to optimization, determines the input size of the NN. Pizzuti et al. found an 8-h time window to be optimal based on preliminary analysis, employing a FFNN with eight input neurons, 10 neurons in the hidden layer, and one output neuron for each ANN used in the BEM. The brightness was adjusted linearly based on normalized traffic flow, ranging from 50% to 100%. On the other hand, Marino et al. used a 24 h window and implemented a “save best” approach during training to avoid overfitting. They referred to the EN 13201-2 [125], norm to translate the forecasted traffic into appropriate lighting classes. Agramelal et al. [86], explored various types of ANNs for traffic forecasting and controlling PV-powered streetlights. They tested a single hidden layer FFNN and a deep neural network (DNN) with multiple hidden layers, using different lag values to predict traffic on a highway for the upcoming hour. The performance of these NN models was compared against a statistical forecast method, specifically the SARIMA model. The authors evaluated the forecast accuracy using RMSE and MAPE as metrics. The DNN model with a 24 h time window and two hidden layers containing 100 and 64 neurons, respectively, outperformed other traffic forecast models, demonstrating superior accuracy for controlling PV-powered streetlights. In a similar work [126], the authors examined various traffic prediction models to forecast the hourly traffic on two separate carriageways of a highway. They used a multivariate traffic model incorporating traffic volume, speed, and occupancy rate. Superior performance was noted from both the Long Short-Term Memory (LSTM) and DNN models, each with a 48 h lag. Both models utilized a dropout rate to prevent overfitting and had two hidden layers with 100 and 50 neurons, respectively. In both cases, the authors fed the predicted traffic volume to a fuzzy controller to control SLs.
Although previous studies have demonstrated notable energy savings, leveraging a shorter time horizon for traffic prediction can further enhance these savings, especially with the development of deep learning. A 15-min time horizon was reported as optimal by Wojnicki et al. [127], for forecasting to optimize energy savings while addressing concerns related to light fluctuation and reduced visibility.
To forecast PV power generation, in the study by Tukymbekov et al. [128], a deep learning model using LSTM was employed to predict power generation in adverse weather conditions for PV-powered SLs. Historical data from an installed weather station were used to train the model, while meteorological forecast data obtained from the internet were utilized to forecast hourly power generation for the next five days. The generated forecasts were used to optimize the consumption of the SLs by calculating an optimal lamp brightness coefficient, ensuring a minimum battery charge of 30% and a minimum lamp brightness of 20%. The accuracy and storage capabilities of the LSTM model proved effective in improving the energy management of the SL system. In Agramelal et al. [44], a multivariate multistep gate recurrent unit (GRU) was employed to forecast the solar irradiance for the upcoming 3 days. The predicted irradiance values were used to reflect the power generation of PV SL for the upcoming 3 days. The authors then aggregated the total predicted values during the 3 days and used it along with the forecasted traffic flow in the upcoming hour to control brightness through a fuzzy logic controller.
Zamanidou et al. [129], used a multivariate LSTM model for day-ahead power generation forecasting from a PV panel and wind turbine in a hybrid renewable energy system. They optimized energy management by incorporating weather variables and historical data. The model considered cloud cover for solar power and wind direction for wind power, significantly improving prediction accuracy. An energy management algorithm balanced power production and consumption, adjusting LED lights and charging hotspots based on forecasts. Testing showed a 23% average reduction in power consumption and savings of 80.63 KWh of battery capacity over ten days, while minimizing reliance on the grid.
AI in computer vision has become increasingly popular due to its ability to provide powerful tools for extracting valuable features from visual data. This enables computer systems to effectively perceive and interpret images and videos, facilitating tasks such as object detection, recognition, and segmentation.
Bilal et al. [130] used a FFNN for real-time object detection at night, turning SLs fully ON when a pedestrian or vehicle is detected. However, they did not explore various light control schemes based on object classification. Supriya et al. [50], focused on identifying vehicles through license plate numbers using a Convolutional Neural Network (CNN), mainly for speed measurement and tracking fast-moving vehicles. Qi Yun et al. [131] utilized a Support Vector Machine (SVM) for recognizing vehicle lamps at night, aiding in traffic flow measurement and illumination level estimation. Their approach involved processing video frames through various steps such as grayscale transformation and binarization, followed by SVM-based vehicle lamp recognition. A multi-model fusion approach, combining NNs and exponential smoothing, was used for predicting traffic flow and adjusting brightness levels accordingly. The system also featured real-time control, activating based on adjacent area illumination levels, and could provide early warnings for consistent abnormal illumination values, indicating a need for intervention.
In Yuan Xu et al. [132], surveillance cameras were deployed to detect pedestrians in parks and plazas. The system, implemented on a Raspberry Pi, uses a Histogram of Oriented Gradient (HOG) for fast detection and a CNN. The CNN, inspired by the You Only Look Once (YOLO) architecture, helps eliminate false positives caused by the HOG confusing humans and animals. The system has demonstrated higher accuracy in pedestrian detection compared to other sensors, effectively avoiding false lamp activations triggered by animals.
YOLO (You Only Look Once) is a real-time object detection system that utilizes a CNN to analyze entire images in one pass. It divides images into grids, predicting bounding boxes and object probabilities within each cell, enabling swift and accurate object identification.
In SL control, YOLO is considered as the optimal choice due to its speed, efficiency, and ability to detect multiple objects simultaneously. When combined with other sensors, YOLO can reduce processing time and enable quick adjustments in lighting intensity based on detected pedestrians or vehicles [133]. Additionally, YOLO exhibits strong generalization performance, making it effective in handling diverse traffic scenarios and lighting conditions.
Shoaib et al. [134], evaluated object detectors like YOLOv2, YOLOv3, SSD, and Faster RCNN with various architectures to improve SL efficiency. Faster RCNN with Efficientnet-B0 had the highest mean average precision (mAP), while YOLOv2 and v3 had the quickest detection times. Their approach involves dynamically adjusting SL intensity based on vehicle proximity, optimizing energy use. Chen et al. [135], utilized YOLOv3 for object detection in SL control due to its Feature Pyramid Network (FPN), improving the detection accuracy of small objects at various scales and resolutions. In their design, SL in a parking lot adjusted brightness based on vehicle detection. Edge computing was emphasized to minimize data transfer needs, distributing processing closer to data generation, reducing reliance on remote cloud servers [102].
Jang woon Baek et al. [136] used Tiny-YOLO in edge cameras for object detection, dynamically adjusting SL brightness based on detected pedestrians and vehicles. Ren Tang et al. [137] developed an intelligent dimming method specifically for intersections, using the YOLOv5s detection model. Their system was designed to adapt the dimming profile based on the type of road user detected, assigning different output powers and dimming priorities for various modes such as motor vehicle mode, non-motor vehicle mode, and pedestrian mode. The YOLOv5s model outperformed other models like SSD, YOLOv4, and YOLOv3 in terms of detection speed and classification accuracy, achieving significant energy savings compared to traditional and LED streetlighting technologies. Asif et al. [138], tested a SSL system at two sites. The system used YOLOv5 for real-time vehicle and pedestrian detection on the NVIDIA Jetson Nano multimedia processing unit. It controlled the intensity of SL based on the detected traffic flow. The algorithm consisted of flow control for video data processing and a prediction model combining YOLO and region-based techniques to identify different types of vehicles within a region of interest (ROI). The evaluation of the system showed reduced power consumption across various periods of the day. The authors of [139] present a system based on a responsive sensor network, adjusting the intensity of SLs in response to traffic volume. An IP camera equipped with the YOLOv5 algorithm captured and classified the type of traffic, with hourly counts stored for analysis. Lighting classifications were calculated per the CEN/TR 13201-1:2014 standard, accounting for traffic volume and composition, while other parameters remained constant. Findings revealed that the responsive sensor network delivered the highest energy savings. Table 5 details the specific NN architectures, their associated input-output, and the corresponding lighting schemes in each reviewed study.
Table 5. Related works on control methods employing ANNs.
| Paper | NN Application | Type of NN | Inputs | Outputs | Intermediate Controller | System Validation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|---|---|
| [137] | Detect vehicles, pedestrians and motorists in night conditions | YOLOv5s | High-definition video images | Predicted bounding boxes and class labels of the detected objects | Controller outputs different brightness level based on the class of detected road user. | Experimental setup on an intersection | Step dimming | Up to 35.2% energy savings |
| [130] | Detection and classification of objects at night | FFNN | Video images | Predicted bounding boxes | Simple if-then rules based on if there is a valid detection | Simulations | Two steps (20% minimum) | Not specified |
| [134] | Detect and identify road users from video | SSD, YOLOv3, YOLOv2 | High-definition video images | Predicting bounding boxes and class probabilities | If-then rules are used to change the brightness level when a vehicle approaches or leaves the detection area | Simulations | Zoning | Not specified |
| [129] | Multivariate time-series forecast: predict energy generation of PV panel and wind turbines | LSTM | For PV power: solar irradiation, temperature, and cloud cover prediction data.For wind power: historical data and climate prediction data, including wind speed and direction | Day-ahead hourly power generation of a PV panel and wind turbine | If-then rules based on load demand and power production | Simulations | Step dimming | An average of 23% across 10 days, while day-to-day it ranged from 6% to 80% |
| [139] | Image processing | YOLOv5 | Video images from IP camera | Classification of road users and traffic count | Light classes obtained from traffic count and traffic composition along with other fixed road parameters | Simulations | Step dimming (classes) | Up to 55% reduction in electricity costs |
| [50] | Image processing | CNN | Video images | Detect vehicle through license plate numbers | Controller not based on results of image processing | Simulation | Two steps | Not specified |
| [135] | Image processing | YOLOv3 | Video images | Bounding boxes, along with their class labels and confidence scores; | If-then rules switching ON lamps in front of detected vehicles on a parking lot | Simulation and small scale prototype | Two steps + zoning (in front of vehicles) | Not specified |
| [136] | Image processing | Tiny-YOLO | Video images | Detect, track and classify type of road users | Simple if-then rules based on if there is a valid detection | Simulation | Two steps | Not specified |
| [120] | Predict energy consumption | FFNN | Three inputs: inter-distance between streetlights; energy consumption of the SLs; traffic volume on the road; | Reduced energy consumption of the street lighting system | None | Simulations | Zoning | Various energy savings for different interspaces and traffic flow between SLs |
| [119] | Control lamps | FFNN | Meteorological data | Light level of SLs | None | Simulations | Freely controlled + individual or group controlled | Up to 60% |
| [131] | Time-series forecast: predict traffic flow | Not specified | Previous traffic flow data | Predict traffic flow for the upcoming 15 min | Lamp brightness adjusted based on traffic flow | Simulations | Group controlled + step dimming | 30% energy reduction |
| [132] | Image processing | CNN | Video images | Bounding boxes, along with their class labels and class probabilities | Lamps turn ON if there is a detection | Simulations + small prototype | Two steps (on/off) | 30% energy savings |
| [128] | Multivariate time-series forecast: predict energy generation | LSTM | Historical data on weather comprising 11 features | Predict the hourly PV panel energy generation for the upcoming 5 days | Brightness coefficients for the upcoming 5 nights are calculated based on the forecast results | Meteorological prototype | Freely controlled | Battery charge always maintained above 30% |
| [118] | Control lamps | FFNN | Meteorological data comprising nine inputs | Light level of SLs for the upcoming 24 h | None | Simulations | Freely controlled + individual or group controlled | Not specified |
| [123] | Univariate time-series forecast: predict traffic flow | FFNN | Previous 8 h historic traffic flow data | Traffic flow for the upcoming 1 h | A linear function converts predicted traffic to corresponding light levels | Simulations | Two steps + freely controlled | Up to 50% |
| [124] | Univariate time-series forecast: predict traffic flow | FFNN | Previous 24 h historic traffic flow data | Traffic flow for the upcoming 1 h | A downgrade by two classes or one class occurs if normalized traffic flow decreases by 25% or 50%, according to the EN 13201 | Simulations | Step dimming (EN classes) | Up to 40% energy reduction |
| [122] | Process data | FFNN | Four inputs comprising arm length, mounting height, inter-distance between lamps and normalized sensor values | Inferences from previously acquired data | Fuzzy logic controller | Implemented in a residential area | Step dimming + zoning with two levels (on/off) | Power consumption reduced by 13.5% |
| [121] | Predict power from luminosity level and vice-verse | Two FFNNs | FFNN1: power consumption;FFNN2: luminosity level | FFNN1: luminosity level; FFNN2: power consumption | None | Prototype | Step dimming + group control | Up to 25% |
| [86] | Univariate time-series forecast: predict traffic flow | FFNN | Previous 24 h historic traffic flow data | Traffic flow for the upcoming 1 h | Fuzzy logic controller | Simulations | Freely controlled + group controlled | Battery charge always maintained above 30% even in worst case scenarios |
| [126] | Multivariate time-series forecast: traffic flow prediction | FFNN, LSTM | Previous 48 h historic traffic data including traffic volume, speed, and occupancy rate | Traffic flow for the upcoming 1 h | Fuzzy logic controller | Simulations | Freely controlled + group controlled | Saves up to 58% |
| [44] | Multistep multivariate time-series forecasting: solar irradiance prediction | FFNN, LSTM, GRU, CNNLSTM | Previous 7-days hourly weather data comprising: temperature, wind speed, wind direction, solar irradiance | Hourly irradiace values for the upcoming 3 days | Fuzzy logic controller | Simulations | Freely controlled + group controlled | Battery charge always maintained above 90% even in worst case scenarios |
5.9.2. Fuzzy Logic Controller
Derived from the approximate and fuzzy way of human reasoning, fuzzy logic, first founded by Zadeh et al. [140], is used to handle the concept of partially true and partially false values [141]. It uses a fixed set of linguistic IF-THEN rules derived from expert knowledge to control non-linear and complex systems. The basic structure of a FLC is shown in Figure 5—it primarily consists of a fuzzifier, a decision-making block (i.e., rules and inferences), and a defuzzifier. In addition, it contains a knowledge base which contains the used IF-THEN rules and membership functions.
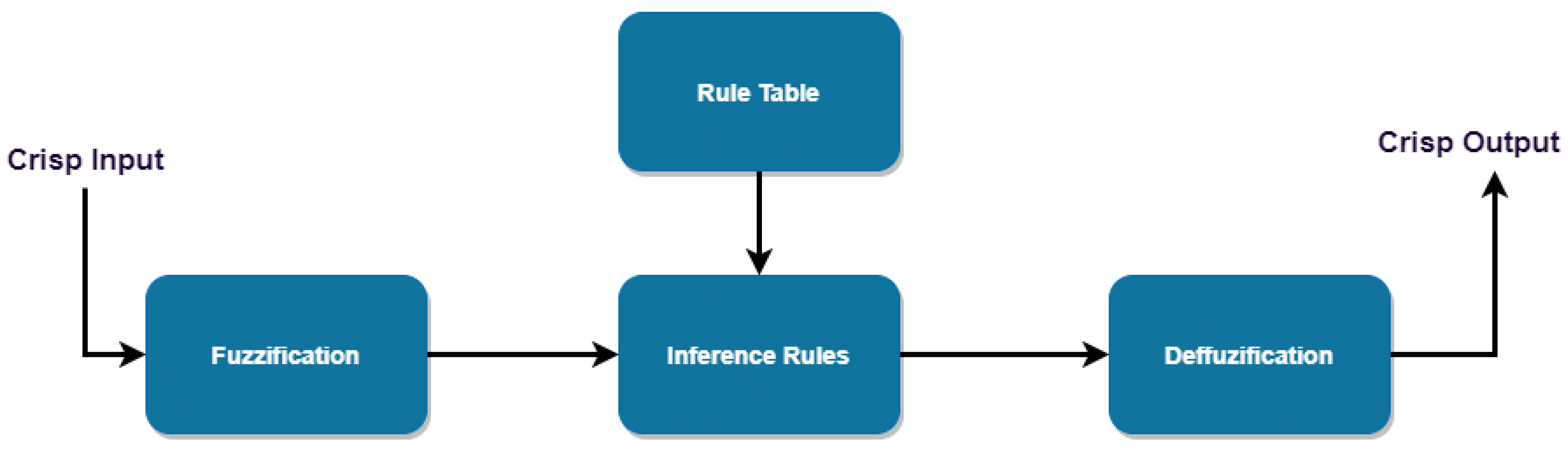
Figure 5. Sequential workflow of key processes in an FLC framework.
In the context of SSL, FL is primarily used to control lamp brightness, or can be used for data aggregation or even in some cases for forecasting.
The inputs to the FL-based SSL system are usually the crisp sensor readings which are fuzzified to fuzzy linguistic sets using membership functions. Then the control is achieved by using the IF-THEN rules linking between the input and output fuzzy sets. The output in a SSL system corresponds normally to the dimming or light level expressed linguistically, which is defuzzified back to a crisp value to control the lamps brightness. For instance, in [142], the system employs a fuzzy rule-based system to dynamically control SL intensity. The system adjusts lamp intensity based on factors such as time of day, month of the year, weather conditions, and detected traffic. The fuzzy system operates on the principle of maximum operator for aggregation, ensuring precise decisions across varied input combinations. The output represented by nine liguistic variables, is defuzzified using the center of area method and transmitted to a cluster of SLs. In Altun et al.’s [143] research, a FLC adjusts light intensity, taking into account the measured light level and battery’s state of charge. Similarly, Wadi et al. [144], employed a FLC using battery level and wind speed as inputs, each characterized by three linguistic variables. The system’s output was computed using the Mamdani method and center of gravity for defuzzification. In another research, Qian et al. [145], applied two Mamdani FLCs to manage the brightness and color temperature of SLs. The system took readings from temperature, air quality, and humidity sensors. As these sensor readings increased, the controllers were designed to inversely adjust both the color temperature, and brightness. This setup allowed maintaining optimal lighting conditions while maximizing energy efficiency.
Coupled with computer vision, Belan et al. [146], implemented a FLC to control the dimming level of SLs. They used two inputs for the FLC: ambient light and pedestrian volume. The system used a combination of HOG and SVM to process camera-obtained frames for pedestrian presence near light poles. The system employed seven linguistic variables for the ambient light and dimming output, while pedestrian traffic used six linguistic variables. The Takagi-sugeno was choosen as an inference method. Junjian et al. [147] implemented a multi-engine fuzzy inference system for SL brightness control, using various parameters such as traffic flow, ambient brightness, and humidity to determine the relative power output of SLs. A joint decision module aggregated the outputs, ensuring the calculated relative power remained within the specified range. On the other hand, Maohua et al. [148] optimized their FL system using a lookup table, focusing on sensor voltage deviation and change rate as inputs, and employing the max-min method and weighted average for rule inferences. This approach facilitated real-time adjustments of lamp brightness in accordance with natural light conditions, enhancing the system’s overall performance and responsiveness. In a series of studies by Agramelal et al. [44][86][126], a FLC was progressively enhanced for optimizing streetlamp brightness. Initially, the FLC used forecasted traffic flow and battery levels as inputs. Later, expected solar irradiance was incorporated, initially for a one-day forecast and subsequently extended to three days. Additionally, the FLC output was refined to match the road surface illuminance level, ensuring compliance with CIE regulations.
Prior works have predominantly used a fixed set of membership functions and IF-THEN rules, some have explored more adaptive approaches. For instance, Volosencu et al. [149], introduced a two-step control system which involves a high-level light control unit overseeing multiple lower-level Zone Lighting Coordination Units (ZLCUs). Each ZLCU implements its own FLC with default day-to-day fuzzification parameters. The inputs are the aggregated readings of lux-meters and presence sensors, and the output is the dimming level satisfying light constraints of each ZLCU. The light controller unit, a knowledge-based system, dynamically adjusts the fuzzy parameters of each ZLCU, including membership functions and IF-THEN rules, to accommodate unexpected or scheduled city events, providing greater flexibility and adaptability. The adaptability of such systems can be further enhanced by incorporating data-driven learning processes. For example, in Mohandas et al. [122], an ANN processed input data, and the FLC then determined the light level to either dim, low, or high. Elejost et al. [150], used a Sugeono-type Adaptive Neural-based Fuzzy Inference System (ANFIS), to obtain a set of IF-THEN rules that can be integrated into sensor nodes with low computational capabilities. The inputs to the proposed model were light intensity, twilight threshold, pedestrian flow, daytime and location. The outputs were the dimming graduation and an alert signal for abnormal situations. The model was simulated using Matlab fuzzy logic toolbox, with the use of a combination between BP and least-squares to train the proposed system.
FL can also be applied to predict pedestrian pathways, as demonstrated in the study by Kim et al. [151]; their system controls SL brightness by tracking pedestrian locations and motion vectors. Employing both fuzzy logic and neural networks in parallel, the system selects the most suitable approach based on data properties, with the fuzzy system outperforming in low-data situations. A summary of select studies implementing fuzzy logic in SL control is provided in Table 6.
Table 6. Related works on control methods employing fuzzy logic.
| Paper | Inference Methods | Inputs | Input’s Membership Functions | Aggregation Method | Outputs | Output’s Membership Function | Deffuzification | System Implementation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|---|---|---|---|
| [142] | Mamdani | Weather and Time | Triangular | Maximum operator | Brightness level | Trapezoidal | Center of gravity | Simulations | Freely controlled + group controlled | Up to 50% |
| [145] | Two Mamdani inference methods | Humidity, temperature, air quality, illuminance | Unspecified | Maximum operator for both inference methods |
|
Unspecified |
|
Simulations | Group controlled + freely controlled + CCT | Unspecified |
| [147] | Three Mamdani inference methods | Traffic flow, ambient brightness and humidity | Triangular | Unspecified | Relative output power | Triangular and trapezoidal | Center of gravity | Simulations | Freely controlled | Up to 69% |
| [143] | Mamdani | Light level, state of charge of battery | Triangular | Unspecified | Light intensity | Triangular | Unspecified | Simulations | Freely controlled | 24% energy savings |
| [146] | Takagi-sugeno | Ambient light, pedestrian volume | Triangular | Unspecified | Dimming level | Triangular | Unspecified | Simulations | Freely controlled | 44% energy savings |
| [148] | Mamdani | Light level, voltage deviation and change rate | Triangular | Max-min method | Light intensity | Unspecified | Weighted average method | Simulations + prototype | Step dimming | Unspecified |
| [144] | Mamdani | Battery level, wind speed | Triangular | Unspecified | Light intensity | Triangular | Center of gravity | Simulation | Freely controlled | Not specified |
| [149] | Mamdani | Aggregated readings of lux-meters and presence sensors | Triangular and trapezoidal | Min-max | Dimming level | Triangular and trapezoidal | Centroid method | Simulations | Freely controlled | Unspecified |
| [150] | Sugeono-type ANFIS | Light intensity, twilight threshold, pedestrian flow, daytime, location | Bell-shaped | Maximum |
|
Unspecified | Weighted average method | Test bed | Freely controlled | Up to 40% energy savings |
| [86] | Mamdani-sugeono | Traffic flow, battery energy level | Triangular | Min-max | Light level | Triangular | Centroid method | Simulations | Freely controlled + group controlled | Battery charge maintained above 30% |
| [126] | Mamdani-sugeono | Traffic flow, battery energy level, solar irradiance for the upcoming one day | Triangular | Min-max | Light level | Triangular | Centroid method | Simulations | Freely controlled + group controlled | Saves up to 58% |
| [44] | Mamdani-sugeono | Traffic flow, battery energy level, solar irradiance for the upcoming three days | Triangular | Min-max | Illuminance level | Triangular | Centroid method | Simulations | Freely controlled + group controlled | Battery charge maintained above 90% |
5.9.3. Multi-Agent Systems-Based Control
Multi-Agent Systems (MAS), can provide a flexible, distributed solution where individual agents can autonomously control specific SLs or clusters, making intelligent decisions based on a variety of environmental factors and operational conditions.
Integrating both hardware and software agents has been demonstrated to enhance SSL adaptability and intelligence. Klimek et al. [152], introduced a context-aware system composed of diverse agents, each with specific tasks. These agents, including Lamp, Sensor, User, Light, Decision-Making, and Context Interference, work together to deliver light control. The Decision-Making agent, acting as the central controller within the Segment Controller, instructs Light agents to react to control data and adjust to context changes reported by the local context manager. The system also incorporates an Intelligent Agent platform in the central unit that handles context integration and abstraction, deriving higher-level, application-relevant context from lower-level data. A followup work by the same authors [153], showcased a versatile MAS design that allows varied lamp controls, from simple on-off switches to light intensity adjustments based on time and conditions. It even permits the creation of individual rules for lamps situated in areas requiring special caution, such as pedestrian crossings or schools.
Casavola et al. [154] developed a Multi-Agent System (MAS) for optimizing SL and traffic management in urban areas, using a reputation-based mechanism. The system autonomously controls SL brightness in specific urban road segments, adjusting to real-time traffic conditions. A hybrid traffic model estimates vehicle numbers in each road segment. Agents, selected based on a distributed reputation mechanism, identify sensors with the highest informative content or quality of service. The proposed approach demonstrated significant energy savings, effectively identifying the most informative sensors based on shared reputation among agents. In the approach developed by Escolar et al. [155], WSN equipped SL, acts as an autonomous agent that continuously monitors and responds to changes in its environment. These agents were programmed using AgentSpeak (L); the agents are configured with a set of BDIs, each identified into three distinct types: data collectors, sink nodes, and cluster heads. Data collector nodes were responsible for adjusting light intensity based on pedestrian presence and light readings. Depending on the conditions, the lighting could be set to high, medium, low, or even off, enabling energy savings. The simulations using SAMSON and JASON frameworks, provided information on the time spent by each lamppost in each intensity state, from which energy savings were estimated against non-adaptive approaches. The decision-making process of BDI agents operates like a finite state machine.
Alternate decision-making processes can be grounded in ANNs, enabling agents to learn from their experiences and adapt their behavior over time. A particularly noteworthy approach involves integrating evolutionary NNs with MAS, a method that allows the system to adapt and evolve over time, thereby optimizing its performance.
The study of Nascimento et al. [156], introduced a MAS with embodied agents, consisting of physical components like microcontrollers, sensors, and actuators. These agents use a NN for decision-making, allowing each agent to independently learn and adjust its weights based on its environment. They employ an evolutionary algorithm to select the fittest agent, optimizing the system’s performance. Each embodied agent uses a three-layer FFNN. The NN inputs encompass motion and light sensor signals, messages from neighboring agents, and future-oriented feedback signals. Outputs include feedback signals, transmission to other lamps, and light level adjustments. Agents were trained in a simulation environment for easier hardware implementation, using a fitness function that factors in energy consumption, completed routes before simulation termination, and total travel time. Post-evolution, the agents were programmed into an Arduino using pre-determined NN weights. Real-world tests using three Arduino cards validated the simulation results by accurately reflecting the physical agents actions. In another work [157], the authors enhanced their previous work using the Feature Deselective NeuroEvolution of Augmenting Topologies algorithm (FD-NEAT) to optimize neural networks by eliminating non-useful features and adjusting connections. They also introduced a human-in-the-loop approach, allowing manual intervention for managing IoT agents’ variability and automatic feature reconfiguration based on environmental changes.
Other studies, adopted FL as a decision-making process within MAS for SL management. For instance, Moghadam et al. [158], created an energy-efficient system using a hierarchical holonic MAS. Here, the head agents calculated optimal lamp operation times using geographical and climatic factors, while learner agents controlled the lighting using a fuzzy inference engine. Their experiment on a small traffic network demonstrated significant energy reductions. Similarly, Kviesis et al. [159], developed a SSL control framework using a MAS that communicated with a cloud-based central control system. The system employed an adaptive fuzzy logic rule block in a cost-effective FPGA for decentralized control, enabling self-adaptation and learning based on weight change commands from the cloud. Such agent-cloud interactions optimized the lighting control.
While there have been considerable advancements in the use of MAS for SL control, the application of reinforcement learning in this context seems underexplored. Reinforcement learning could potentially introduce significant improvements by enabling agents to learn from their experiences and adjust their actions based on rewards and penalties. Future research could focus on integrating reinforcement learning within the MAS framework to harness these potential benefits. Table 7 provides an overview of the employed light schemes for each reviewed paper.
Table 7. Related works on control methods employing Multi-Agent Systems.
| Paper | Energy Source | Used Sensors | Used Lamps | System Implementation | Dimming Profile | Energy Savings |
|---|---|---|---|---|---|---|
| [154] | Power Grid | Camera, noise sensor | LED and HPS | Simulations | Two steps + freely controlled | 70% savings |
| [152] | Grid | Electrical measurement, presence, temperature, light | Unspecified | Simulations | Two steps + group controlled + step dimming | Unspecified |
| [153] | Power grid | PIR, light sensor, velocity sensor | Unspecified | Simulations | Two steps + group controlled + step dimming | Unspecified |
| [156] | Power grid | Brightness, motion | Unspecified | Simulations + prototype | Step dimming | Unspecified |
| [157] | Power grid | Brightness, motion | Unspecified | Simulations | Step dimming | Unspecified |
| [155] | Power grid | Voltage, light, presence | LED | Simulations | Step dimming | 40% savings |
| [159] | Power grid | Special quad PIR sensor; IR sensors; temperature; light; humidity; moisture | LED | Simulations | Step dimming | Unspecified |
| [158] | Power grid | Special quad PIR sensor; IR sensors; temperature; light; humidity; moisture | HPS | Simulations | Step dimming | Paper reports several energy consumption measurements |
5.9.4. Control Based on Other AI Models
Other AI models applied in the context of SL control includes SVM. Chen et al. [160], present an enhanced dimming algorithm that uses SVM and directed acyclic graphs for categorizing dimming levels based on factors like light intensity and traffic flow. To address SVM’s binary classification restriction, the authors employed directed acyclic graphs for category division and subsequent SVM classification. A multistage timing dimming strategy is also proposed for energy-saving control.
In Yu Hu et al. [161], the K-means++ algorithm clusters data concerning light intensity and traffic flow, leading to a six-category dimming model. This model uses SVM with linear, polynomial, and Gaussian kernel functions for classification based on a directed acyclic graph. The resulting categories then control the brightness of the streetlights. While the above-discussed research demonstrates promising utility of SVM in SL control, other machine learning algorithms such as decision trees, and XGBoost have also shown significant potential in this field. Somrudee et al. [162] used an AI platform to predict day-ahead illuminance in a campus setting, applying machine learning models like gradient boosting, random forest, decision tree, and XGBoost to environmental data. XGBoost was the most effective, using five parameters: humidity, temperature, air pressure, illuminance, wind velocity, and timestamp. Despite its efficiency in control based on illuminance predictions, the system ran at full intensity when illuminance fell below a certain threshold, leading to unnecessary energy usage throughout most of the night. System efficiency could be enhanced by taking into account the presence of nearby individuals.
6. Miscellaneous Functions
SLs, traditionally employed for illumination, are evolving into multifunctional platforms with the integration of sensors, communication technologies, and innovative energy solutions. These enhanced capabilities enable SLs to serve as hubs for connectivity, including Wi-Fi and 5G networks, sources for alternative power such as charging EVs, monitors for urban environments assessing air quality and weather, and facilitators for parking and security measures.
-
Streetlamps and Connectivity
- -
-
WiFi hotspot: SL as Wi-Fi hotspots provide essential internet access and enhance urban connectivity. This transformation aligns with the shift towards smart city development, where Wi-Fi-enabled SLs can serve as integral components of a city’s digital infrastructure. Various studies in the literature highlight the potential of SLs as Wi-Fi hotspots [129][163].
- -
-
5G or Beyond5G/6G: SLs play a key role in integrating 5G and 6G networks within smart cities, aiding the high-density base station requirements of these technologies [9]. By leveraging existing SL infrastructure, including 5G/6G femtocell connectivity for green highway management [164], cities can achieve an optimal solution for network deployment. This approach ensures comprehensive coverage, minimizes signal gaps, and contributes to timely energy re-distribution. Transforming SL into base stations also reduces costs and visual clutter, enhancing wireless connectivity for various applications. This integration fosters smart city applications like traffic management, environmental monitoring, and public safety, paving the way for a more connected and sustainable urban landscape.
- -
-
Visible Light Communication (VLC) is a technology that enables data transmission through the use of visible light as the medium. It uses LEDs or other sources of visible light to modulate data signals, and photodetectors or cameras to receive the transmitted information. This allows for data communication while simultaneously providing illumination. Building on this technology, advancements in vehicle positioning have been explored. LED SLs have been used to transmit identification codes with real-world coordinates, which are received by CMOS image sensors in vehicles, enabling the determination of the vehicle position [165][166]. SLs can also transmit information captured by smartphone cameras [167]. These developments in VLC aim to enhance data rates and immunity to radio frequency interference, particularly in Vehicle-to-Infrastructure (V2I) and Infrastructure-to-Vehicle (I2V) communications.
- -
-
Li-Fi technology, a subset of VLC, utilizes LED light for high-speed data communication, offering benefits such as high-speed internet, two-way communication, and enhanced safety in certain environments [168]. Integrated with streetlamps, it has been used to improve toll collection systems and provide location-based services, enhancing navigation and traffic monitoring [168][169]. This technology faces challenges such as the inability to penetrate opaque objects and the necessity for a direct line of sight between transmitters and receivers [170]. Despite these limitations, Li-Fi in SLs presents promising opportunities for smart city applications and enhanced communication infrastructures.
-
Streetlamps as a Power SourceIn response to the growing demand for battery charging in EVs and personal devices, there is an increasing need for accessible power sources. SLs present a promising solution as convenient charging points. Various studies in the literature have proposed innovative solutions for leveraging SLs as EV charging infrastructure [171][172]. Additionally, when stand-alone SLs generate excess energy, this surplus can be used for EV charging or re-injected into the electrical grid [173]. These solutions are particularly impactful in remote and humanitarian settings, where solar-powered SLs can be designed with ground-level AC sockets to provide additional energy access for communities [37].
-
Streetlamps and ParkingSLs, equipped with advanced technologies such as CCD cameras and computer vision techniques, have become crucial in optimizing urban parking solutions. Mounted cameras on SLs offer real-time insights into traffic patterns and parking space availability, aiding in the prevention of traffic congestion due to issues like double-parking [106][174]. Innovative models have been developed to enhance the accuracy and stability of parking space detection, using various methods like overlapping and voting mechanisms [135]. Collectively, these studies demonstrate the growing potential of SLs as multifunctional assets in modern urban planning, specifically in the facilitation and management of parking.
-
Streetlamps and Environmental MonitoringEnvironmental monitoring has become a prominent application for SLs, reflecting their versatile utility in contemporary urban life. Special sensors can detect harmful levels of CO2 and other pollutants in the air [50][163]. These units can also be equipped to measure temperature and humidity, effectively acting as weather stations [66]. Noise pollution is another area where they can contribute. For safety, these installations can be designed to notice strange activities and trigger alarms [47][175], and even listen for unusual noises like gunshots [176]. Additionally, they can look for signs of fire or other emergencies using special sensors [66][163].Extended functions of SLs include street sign queries, push-to-talk features, and speakers [177]. Another exploration involves using footsteps to power streetlamps using the piezoelectric effect, turning everyday human motion into a valuable energy source for urban lighting [178]. The integration of these auxiliary uses within SL emphasizes their potential to enhance urban living.
References
- The World Bank. Urban Development Kernel Description. Available online: https://www.worldbank.org/en/topic/urbandevelopment/overview (accessed on 8 September 2023).
- Lin, B.; Zhu, J. Impact of energy saving and emission reduction policy on urban sustainable development: Empirical evidence from China. Appl. Energy 2019, 239, 12–22.
- Jackett, M.; Frith, W. Quantifying the impact of road lighting on road safety—A New Zealand Study. IATSS Res. 2013, 36, 139–145.
- IEA. Greenhouse Gas Emissions Kernel Description. Available online: www.iea.org/data-and-statistics/data-tools/greenhouse-gas-emissions-from-energy-data-explorer (accessed on 8 September 2023).
- Li, F.; Chen, D.; Song, X.; Chen, Y. LEDs: A promising energy-saving light source for road lighting. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 27–31 March 2009; pp. 1–3.
- Petritoli, E.; Leccese, F.; Pizzuti, S.; Pieroni, F. Smart lighting as basic building block of smart city: An energy performance comparative case study. Measurement 2019, 136, 466–477.
- Avotins, A.; Apse-Apsitis, P.; Kunickis, M.; Ribickis, L. Towards smart street LED lighting systems and preliminary energy saving results. In Proceedings of the 2014 55th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 14 October 2014; pp. 130–135.
- Beccali, M.; Lo Brano, V.; Bonomolo, M.; Cicero, P.; Corvisieri, G.; Caruso, M.; Gamberale, F. A multifunctional public lighting infrastructure, design and experimental test. J. Sustain. Dev. Energy Water Environ. Syst. 2017, 5, 608–625.
- Pasolini, G.; Toppan, P.; Zabini, F.; De Castro, C.; Andrisano, O. Design, deployment and evolution of heterogeneous smart public lighting systems. Appl. Sci. 2019, 9, 3281.
- Bommel, W.V. Road Lighting: Fundamentals, Technology and Application; Springer International Publishing: Cham, Switzerland, 2015.
- Gutierrez-Escolar, A.; Castillo-Martinez, A.; Gomez-Pulido, J.M.; Gutierrez-Martinez, J.M.; Stapic, Z.; Medina-Merodio, J.A. A study to improve the quality of street lighting in Spain. Energies 2015, 8, 976–994.
- Denardin, G.W.; Barriquello, C.H.; Campos, A.; Pinto, R.A.; Dalla Costa, M.A.; do Prado, R.N. Control network for modern street lighting systems. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 1282–1289.
- Viswanathan, S.; Momand, S.; Fruten, M.; Alcantar, A. A model for the assessment of energy-efficient smart street lighting—A case study. Energy Effic. 2021, 14, 52.
- Tetri, E.; Bozorg Chenani, S.; Räsänen, R.S.; Baumgartner, H.; Vaaja, M.; Sierla, S.; Tähkämö, L.; Virtanen, J.P.; Kurkela, M.; Ikonen, E.; et al. Tutorial: Road lighting for efficient and safe traffic environments. Leukos 2017, 13, 223–241.
- Burgio, A.; Menniti, D. A novel technique for energy savings by dimming high pressure sodium lamps mounted with magnetic ballasts using a centralized system. Electr. Power Syst. Res. 2013, 96, 16–22.
- Jin, H.; Jin, S.; Chen, L.; Cen, S.; Yuan, K. Research on the lighting performance of LED street lights with different color temperatures. IEEE Photonics J. 2015, 7, 1–9.
- Ismail, A.; Azmi, M.M.; Hashim, M.; Ayob, M.N.; Hashim, M.M.; Hassrizal, H. Development of a webcam based lux meter. In Proceedings of the 2013 IEEE Symposium on Computers & Informatics (ISCI), Langkawi, Malaysia, 7–9 April 2013; pp. 70–74.
- Dizon, E.; Pranggono, B. Smart streetlights in Smart City: A case study of Sheffield. J. Ambient. Intell. Humaniz. Comput. 2022, 13, 2045–2060.
- Pagden, M.; Ngahane, K.; Amin, M.S.R. Changing the colour of night on urban streets-LED vs. part-night lighting system. Socio-Econ. Plan. Sci. 2020, 69, 100692.
- Todorović, B.M.; Samardžija, D. Road lighting energy-saving system based on wireless sensor network. Energy Effic. 2017, 10, 239–247.
- Askola, J.; Kärhä, P.; Baumgartner, H.; Porrasmaa, S.; Ikonen, E. Effect of adaptive control on the LED street luminaire lifetime and on the lifecycle costs of a lighting installation. Light. Res. Technol. 2022, 54, 75–89.
- CIE 115:2010; Commission International de l’Éclairage. Lighting of Roads for Motor and Pedestrian Traffic. CIE: Vienna, Austria, 2010.
- CEN/TR 13201-1:2014; Road Lighting—Part 1: Guidelines on Selection of Lighting Classes. European Commitee for Standardization: Brussels, Belgium, 2015.
- Shlayan, N.; Challapali, K.; Cavalcanti, D.; Oliveira, T.; Yang, Y. A novel illuminance control strategy for roadway lighting based on greenshields macroscopic traffic model. IEEE Photonics J. 2017, 10, 1–11.
- Park, W.; Jin, M.; Kim, Y.; Kim, K.; Lee, S. Investigating the effect of road lighting color temperature on road visibility in night foggy conditions. Appl. Ergon. 2023, 106, 103899.
- Peña-García, A.; Hurtado, A.; Aguilar-Luzón, M. Impact of public lighting on pedestrians’ perception of safety and well-being. Saf. Sci. 2015, 78, 142–148.
- Raynham, P.; Saksvikronning, T. White light and facial recognition. Light. J. 2003, 68, 29–33.
- Chung, H.; Ho, N.; Hui, S.; Mai, W. Case study of a highly-reliable dimmable road lighting system with intelligent remote control. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; p. 1.
- Haans, A.; De Kort, Y.A. Light distribution in dynamic street lighting: Two experimental studies on its effects on perceived safety, prospect, concealment, and escape. J. Environ. Psychol. 2012, 32, 342–352.
- Lau, S.P.; Merrett, G.V.; Weddell, A.S.; White, N.M. A traffic-aware street lighting scheme for Smart Cities using autonomous networked sensors. Comput. Electr. Eng. 2015, 45, 192–207.
- Novak, T.; Pollhammer, K.; Zeilinger, H.; Schaat, S. Intelligent streetlight management in a smart city. In Proceedings of the 2014 IEEE emerging technology and factory automation (ETFA), Barcelona, Spain, 16–19 September 2014; pp. 1–8.
- Bellido-Outeiriño, F.J.; Quiles-Latorre, F.J.; Moreno-Moreno, C.D.; Flores-Arias, J.M.; Moreno-García, I.; Ortiz-López, M. Streetlight control system based on wireless communication over DALI protocol. Sensors 2016, 16, 597.
- Thungtong, A.; Chaichan, C.; Suwannarat, K. A web-based control system for traditional street lighting that uses high-pressure sodium lamps. Heliyon 2021, 7, e08329.
- Gorgulu, S.; Kocabey, S. An energy saving potential analysis of lighting retrofit scenarios in outdoor lighting systems: A case study for a university campus. J. Clean. Prod. 2020, 260, 121060.
- Beccali, M.; Bonomolo, M.; Ciulla, G.; Galatioto, A.; Brano, V.L. Improvement of energy efficiency and quality of street lighting in South Italy as an action of Sustainable Energy Action Plans. The case study of Comiso (RG). Energy 2015, 92, 394–408.
- Ergüzel, A.T. A study on the implementation of dimmable street lighting according to vehicle traffic density. Optik 2019, 184, 142–152.
- Nixon, J.; Bhargava, K.; Halford, A.; Gaura, E. Analysis of standalone solar streetlights for improved energy access in displaced settlements. Renew. Energy 2021, 177, 895–914.
- Beccali, M.; Bonomolo, M.; Galatioto, A.; Pulvirenti, E. Smart lighting in a historic context: A case study. Manag. Environ. Qual. Int. J. 2017, 28, 282–298.
- Al Irsyad, M.I.; Nepal, R. A survey based approach to estimating the benefits of energy efficiency improvements in street lighting systems in Indonesia. Renew. Sustain. Energy Rev. 2016, 58, 1569–1577.
- Kostic, M.; Djokic, L. A modified CIE mesopic table and the effectiveness of white light sources. Light. Res. Technol. 2012, 44, 416–426.
- Fryc, I.; Czyżewski, D.; Fan, J.; Gălăţanu, C.D. The Drive towards Optimization of Road Lighting Energy Consumption Based on Mesopic Vision—A Suburban Street Case Study. Energies 2021, 14, 1175.
- Davidovic, M.; Kostic, M. Comparison of energy efficiency and costs related to conventional and LED road lighting installations. Energy 2022, 254, 124299.
- Djokic, L.; Cabarkapa, A.; Djuretic, A. Drivers’ impressions under high-pressure sodium and LED street lighting. Light. Res. Technol. 2018, 50, 1212–1224.
- Agramelal, F.; Sadik, M.; Sabir, E.; Saad, A. A Context-Aware Street Light System Based on Multi-variate Forecast and Fuzzy Logic. In Proceedings of the Science and Information Conference; Springer: Cham, Switzerland, 2023; Volume 2, pp. 11–25.
- Wojnicki, I.; Ernst, S.; Kotulski, L. Economic impact of intelligent dynamic control in urban outdoor lighting. Energies 2016, 9, 314.
- Cerezo-Narváez, A.; Otero-Mateo, M.; Pastor-Fernández, A.; Sánchez-Ramos, J.; Ballesteros-Pérez, P. Digital Transformation of a Public Lighting Infrastructure: A Sustainable Proposal. In Digital Transformation in Industry: Digital Twins and New Business Models; Springer: Cham, Switzerland, 2022; pp. 227–245.
- Jia, G.; Han, G.; Li, A.; Du, J. SSL: Smart street lamp based on fog computing for smarter cities. IEEE Trans. Ind. Inform. 2018, 14, 4995–5004.
- L’hadi, I.; Rifai, M.; Alj, Y.S. An energy-efficient WSN-based traffic safety system. In Proceedings of the 2014 5th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 1–3 April 2014; pp. 1–6.
- Leccese, F. Remote-control system of high efficiency and intelligent street lighting using a ZigBee network of devices and sensors. IEEE Trans. Power Deliv. 2012, 28, 21–28.
- Kamoji, S.; Koshti, D.; Noronha, J.; Arulraj, E.; Clement, E. Deep Learning-based Smart Street Lamps—A Solution to Urban Pollution. In Proceedings of the 2020 Second International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 15–17 July 2020; pp. 478–482.
- Yusoff, Z.M.; Muhammad, Z.; Razi, M.M.; Razali, N.F.; Hashim, M.H.C. IOT-Based smart street lighting enhances energy conservation. Indones. J. Electr. Eng. Comput. Sci. 2020, 20, 528.
- Dwiyaniti, M.; Nitisasmita, K.M. Energy efficiency on smart street lighting using raspberry Pi based on SCADA and Internet of Things (IoT). In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1364, p. 012034.
- Gehlot, A.; Alshamrani, S.S.; Singh, R.; Rashid, M.; Akram, S.V.; AlGhamdi, A.S.; Albogamy, F.R. Internet of things and long-range-based smart lampposts for illuminating smart cities. Sustainability 2021, 13, 6398.
- Bora, S.A.; Pol, P.V. Development of solar street lamp with energy management algorithm for ensuring lighting throughout a complete night in all climatic conditions. In Proceedings of the 2016 International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016; Volume 2, pp. 1–5.
- Sikder, A.K.; Acar, A.; Aksu, H.; Uluagac, A.S.; Akkaya, K.; Conti, M. IoT-enabled smart lighting systems for smart cities. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 639–645.
- Galatanu, C.D. On/off optimization of public lighting systems depending on the road class. Procedia Manuf. 2020, 46, 378–383.
- Leccese, F.; Cagnetti, M.; Trinca, D. A smart city application: A fully controlled street lighting isle based on Raspberry-Pi card, a ZigBee sensor network and WiMAX. Sensors 2014, 14, 24408–24424.
- Zotos, N.; Pallis, E.; Stergiopoulos, C.; Anastasopoulos, K.; Bogdos, G.; Skianis, C. Case study of a dimmable outdoor lighting system with intelligent management and remote control. In Proceedings of the 2012 International Conference on Telecommunications and Multimedia (TEMU), Heraklion, Greece, 30 July–1 August 2012; pp. 43–48.
- Lavric, A.; Popa, V.; Sfichi, S. Street lighting control system based on large-scale WSN: A step towards a smart city. In Proceedings of the 2014 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 16–18 October 2014; pp. 673–676.
- Veena, P.; Tharakan, P.; Haridas, H.; Ramya, K.; Joju, R.; Jyothis, T. Smart street light system based on image processing. In Proceedings of the 2016 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 18–19 March 2016; pp. 1–5.
- Yoshiura, N.; Fujii, Y.; Ohta, N. Smart street light system looking like usual street lights based on sensor networks. In Proceedings of the 2013 13th International Symposium on Communications and Information Technologies (ISCIT), Surat Thani, Thailand, 4–6 September 2013; pp. 633–637.
- Mary, M.C.V.S.; Devaraj, G.P.; Theepak, T.A.; Pushparaj, D.J.; Esther, J.M. Intelligent energy efficient street light controlling system based on IoT for smart city. In Proceedings of the 2018 international conference on smart systems and inventive technology (ICSSIT), Tirunelveli, India, 13–14 December 2018; pp. 551–554.
- Rahman, M.A.; Asyhari, A.T.; Obaidat, M.S.; Kurniawan, I.F.; Mukta, M.Y.; Vijayakumar, P. IoT-enabled light intensity-controlled seamless highway lighting system. IEEE Syst. J. 2020, 15, 46–55.
- Abdullah, A.; Yusoff, S.H.; Zaini, S.A.; Midi, N.S.; Mohamad, S.Y. Energy efficient smart street light for smart city using sensors and controller. Bull. Electr. Eng. Inform. 2019, 8, 558–568.
- Pardo-Bosch, F.; Blanco, A.; Sesé, E.; Ezcurra, F.; Pujadas, P. Sustainable strategy for the implementation of energy efficient smart public lighting in urban areas: Case study in San Sebastian. Sustain. Cities Soc. 2022, 76, 103454.
- Garg, S.; Ahuja, S.; Randhawa, S. Real time adaptive street lighting system. In Proceedings of the Advances in Computational Intelligence, Security and Internet of Things: Second International Conference, ICCISIoT 2019, Agartala, India, 13–14 December 2019; Springer: Singapore, 2020; pp. 223–239.
- Pinto, M.F.; Mendonça, T.R.; Coelho, F.; Braga, H.A. Economic analysis of a controllable device with smart grid features applied to LED street lighting system. In Proceedings of the 2015 IEEE 24th International Symposium on Industrial Electronics (ISIE), Buzios, Brazil, 3–5 June 2015; pp. 1184–1189.
- Sánchez Sutil, F.; Cano-Ortega, A. Smart public lighting control and measurement system using LoRa network. Electronics 2020, 9, 124.
- Satrya, G.B.; Reda, H.T.; Woo, K.J.; Daely, P.T.; Shin, S.Y.; Chae, S. IoT and public weather data based monitoring & control software development for variable color temperature LED street lights. Int. J. Adv. Sci. Eng. Inf. Technol. 2017, 7, 366–372.
- Daely, P.T.; Reda, H.T.; Satrya, G.B.; Kim, J.W.; Shin, S.Y. Design of smart LED streetlight system for smart city with web-based management system. IEEE Sensors J. 2017, 17, 6100–6110.
- Saad, R.; Portnov, B.A.; Trop, T. Saving energy while maintaining the feeling of safety associated with urban street lighting. Clean Technol. Environ. Policy 2021, 23, 251–269.
- Hettiarachchi, A.; Islam, S.N. IoT-enabled smart street light control for demand response applications. In Emerging Real-World Applications of Internet of Things; CRC Press: Boca Raton, FL, USA, 2022; pp. 183–202.
- Zhang, J.; Qiao, G.; Song, G.; Sun, H.; Ge, J. Group decision making based autonomous control system for street lighting. Measurement 2013, 46, 108–116.
- Meng, H.; Sun, Y. Deconstruction of Urban Public Space Art Design Using Intelligent Sensor and Information Fusion. J. Sensors 2022, 2022, 9360982.
- Wang, L.; Li, H.; Li, S.; Bie, Y. Gradient illumination scheme design at the highway intersection entrance considering driver’s light adaption. Traffic Inj. Prev. 2022, 23, 266–270.
- Li, H.; Wang, L.; Hu, H.; Bie, Y. Optimal Matching between Vehicle Speed and Lighting at Intersection Based on Traffic Risk Analysis. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2023, 9, 04023004.
- EN 15232 Standard; Energy performance of buildings impact of building automation, controls and building management. CEN/CENELEC: Brussels, Belgium, 2012.
- Ożadowicz, A.; Grela, J. Energy saving in the street lighting control system—A new approach based on the EN-15232 standard. Energy Effic. 2017, 10, 563–576.
- Bonomolo, M.; Ferrari, S.; Zizzo, G. Assessing the electricity consumption of outdoor lighting systems in the presence of automatic control: The OL-BAC factors method. Sustain. Cities Soc. 2020, 54, 102009.
- Atis, S.; Ekren, N. Development of an outdoor lighting control system using expert system. Energy Build. 2016, 130, 773–786.
- Zhang, J.J.; Zeng, W.H.; Hou, S.L.; Chen, Y.Q.; Guo, L.Y.; Li, Y.X. A low-power and low cost smart streetlight system based on Internet of Things technology. Telecommun. Syst. 2022, 79, 83–93.
- Shnayder, D.; Filimonova, A.; Panda, S. Intelligent distributed monitoring and control system for lighting networks based on smart grid concept. In Proceedings of the 2018 International Russian Automation Conference (RusAutoCon), Sochi, Russia, 9–16 September 2018; pp. 1–5.
- Nagy, A.M.; Simon, V. Survey on traffic prediction in smart cities. Pervasive Mob. Comput. 2018, 50, 148–163.
- Shahzad, G.; Yang, H.; Ahmad, A.W.; Lee, C. Energy-efficient intelligent street lighting system using traffic-adaptive control. IEEE Sensors J. 2016, 16, 5397–5405.
- Juntunen, E.; Sarjanoja, E.M.; Eskeli, J.; Pihlajaniemi, H.; Österlund, T. Smart and dynamic route lighting control based on movement tracking. Build. Environ. 2018, 142, 472–483.
- Agramelal, F.; Sadik, M.; El Hannani, A.; Moubarak, Y. A Traffic-Aware Street Lighting System Based on Fuzzy Logic Controller. In Proceedings of the 2022 IEEE 18th International Colloquium on Signal Processing & Applications (CSPA), Selangor, Malaysia, 12 May 2022; pp. 132–137.
- Nefedov, E.; Maksimainen, M.; Sierla, S.; Flikkema, P.; Yang, C.W.; Kosonen, I.; Luttinen, T. Energy efficient traffic-based street lighting automation. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1718–1723.
- Mustafa, A.M.; Abubakr, O.M.; Derbala, A.H.; Ahmed, E.; Mokhtar, B. Towards a smart highway lighting system based on road occupancy: Model design and simulation. In Proceedings of the Applications for Future Internet: International Summit, AFI 2016, Puebla, Mexico, 25–28 May 2016; Revised Selected Papers; Springer: Cham, Switzerland, 2017; pp. 22–31.
- Sifakis, N.; Kalaitzakis, K.; Tsoutsos, T. Integrating a novel smart control system for outdoor lighting infrastructures in ports. Energy Convers. Manag. 2021, 246, 114684.
- Boukerche, A.; Wang, J. Machine learning-based traffic prediction models for intelligent transportation systems. Comput. Netw. 2020, 181, 107530.
- Atıcı, C.; Ozcelebi, T.; Lukkien, J.J. Exploring user-centered intelligent road lighting design: A road map and future research directions. IEEE Trans. Consum. Electron. 2011, 57, 788–793.
- Poza-Lujan, J.L.; Sáenz-Peñafiel, J.J.; Posadas-Yagüe, J.L.; Conejero, J.A.; Cano, J.C. Use of receiver operating characteristic curve to evaluate a street lighting control system. IEEE Access 2021, 9, 144660–144675.
- Knobloch, F.; Braunschweig, N. A traffic-aware moving light system featuring optimal energy efficiency. IEEE Sensors J. 2017, 17, 7731–7740.
- Cela, A.; Natowicz, R.; Abidi, S. Smart street lighting energy consumption simulation. In Proceedings of the 2019 International Conference in Engineering Applications (ICEA), Sao Miguel, Portugal, 8–11 July 2019; pp. 1–5.
- Jiang, Y.; Shuai, Y.; He, X.; Wen, X.; Lou, L. An energy-efficient street lighting approach based on traffic parameters measured by wireless sensing technology. IEEE Sensors J. 2021, 21, 19134–19143.
- Viani, F.; Polo, A.; Robol, F.; Giarola, E.; Ferro, A. Experimental validation of a wireless distributed system for smart public lighting management. In Proceedings of the 2016 IEEE International Smart Cities Conference (ISC2), Trento, Italy, 12–15 September 2016; pp. 1–6.
- Mahoor, M.; Salmasi, F.R.; Najafabadi, T.A. A hierarchical smart street lighting system with brute-force energy optimization. IEEE Sensors J. 2017, 17, 2871–2879.
- Sanchez-Sutil, F.; Cano-Ortega, A. Smart regulation and efficiency energy system for street lighting with LoRa LPWAN. Sustain. Cities Soc. 2021, 70, 102912.
- Kovács, A.; Bátai, R.; Csáji, B.C.; Dudás, P.; Háy, B.; Pedone, G.; Révész, T.; Váncza, J. Intelligent control for energy-positive street lighting. Energy 2016, 114, 40–51.
- Issac, T.; Silas, S.; Rajsingh, E.B. Modelling a P-System inspired multi-objective centralized heterogeneous wireless outdoor illumination. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 2935–2950.
- Murthy, A.; Han, D.; Jiang, D.; Oliveira, T. Lighting-enabled smart city applications and ecosystems based on the IoT. In Proceedings of the 2015 IEEE 2nd World Forum on Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 757–763.
- Mora, H.; Peral, J.; Ferrandez, A.; Gil, D.; Szymanski, J. Distributed architectures for intensive urban computing: A case study on smart lighting for sustainable cities. IEEE Access 2019, 7, 58449–58465.
- Saokaew, N.; Kitsatit, N.; Yongkunawut, T.; Ayudhya, P.N.N.; Mujjalinvimut, E.; Sapaklom, T.; Aregarot, P.; Kunthong, J. Smart street lamp system using LoRaWAN and artificial intelligence PART I. In Proceedings of the 2021 9th International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 10–12 March 2021; pp. 189–192.
- García-Castellano, M.; González-Romo, J.M.; Gómez-Galán, J.A.; García-Martín, J.P.; Torralba, A.; Pérez-Mira, V. ITERL: A wireless adaptive system for efficient road lighting. Sensors 2019, 19, 5101.
- Poulsen, E.S.; Andersen, H.J.; Jensen, O.B.; Gade, R.; Thyrrestrup, T.; Moeslund, T.B. Controlling urban lighting by human motion patterns results from a full scale experiment. In Proceedings of the 20th ACM International Conference on Multimedia, Nara, Japan, 29 October–2 November 2012; pp. 339–348.
- Ho, G.T.S.; Tsang, Y.P.; Wu, C.H.; Wong, W.H.; Choy, K.L. A computer vision-based roadside occupation surveillance system for intelligent transport in smart cities. Sensors 2019, 19, 1796.
- Gagliardi, G.; Lupia, M.; Cario, G.; Tedesco, F.; Cicchello Gaccio, F.; Lo Scudo, F.; Casavola, A. Advanced adaptive street lighting systems for smart cities. Smart Cities 2020, 3, 1495–1512.
- Mahmoud, M.M.; Muradkhanli, L. Safer design and less cost operation for low-traffic long-road illumination using control system based on pattern recognition technique. Intell. Control. Autom. 2020, 11, 47.
- Al-Subaie, S.; Jambi, L.; Reda, R.; Qaisar, S. Event-driven smart lighting and surveillance system: A KSA perspective. In Proceedings of the 2018 21st Saudi Computer Society National Computer Conference (NCC), Riyadh, Saudi Arabia, 25–26 April 2018; pp. 1–5.
- Chiradeja, P.; Yoomak, S.; Ngaopitakkul, A. Economic analysis of improving the energy efficiency of nanogrid solar road lighting using adaptive lighting control. IEEE Access 2020, 8, 202623–202638.
- Müllner, R.; Riener, A. An energy efficient pedestrian aware Smart Street Lighting system. Int. J. Pervasive Comput. Commun. 2011, 7, 147–161.
- Cho, Y.; Jeong, H.; Choi, A.; Sung, M. Design of a connected security lighting system for pedestrian safety in smart cities. Sustainability 2019, 11, 1308.
- Kanthi, M.; Dilli, R. Smart streetlight system using mobile applications: Secured fault detection and diagnosis with optimal powers. Wirel. Netw. 2023, 29, 1–14.
- Pramanik, P.K.D.; Sinhababu, N.; Mukherjee, B.; Padmanaban, S.; Maity, A.; Upadhyaya, B.K.; Holm-Nielsen, J.B.; Choudhury, P. Power consumption analysis, measurement, management, and issues: A state-of-the-art review of smartphone battery and energy usage. IEEE Access 2019, 7, 182113–182172.
- Escriva, D.M.L.; Torres-Sospedra, J.; Berlanga-Llavori, R. Smart outdoor light desktop central management system. IEEE Intell. Transp. Syst. Mag. 2018, 10, 58–68.
- Abarro, C.C.; Caliwag, A.C.; Valverde, E.C.; Lim, W.; Maier, M. Implementation of IoT-Based Low-Delay Smart Streetlight Monitoring System. IEEE Internet Things J. 2022, 9, 18461–18472.
- Mohamed, S.A.E. Smart street lighting control and monitoring system for electrical power saving by using VANET. Int. Commun. Netw. Syst. Sci. 2013, 6, 351.
- Kolasa, M. The concept of intelligent system for street lighting control using artificial neural networks. Prz. Elektrotechniczny 2016, 92, 32–37.
- Smys, D.S.; Basar, D.A.; Wang, D.H. Artificial neural network based power management for smart street lighting systems. J. Artif. Intell. Capsul. Netw. 2020, 2, 42–52.
- Sikdar, P.L.; Thakurta, P.K.G. An energy efficient street lighting framework: ANN-based approach. Innov. Syst. Softw. Eng. 2021, 17, 131–139.
- De Paz, J.F.; Bajo, J.; Rodríguez, S.; Villarrubia, G.; Corchado, J.M. Intelligent system for lighting control in smart cities. Inf. Sci. 2016, 372, 241–255.
- Mohandas, P.; Dhanaraj, J.S.A.; Gao, X.Z. Artificial neural network based smart and energy efficient street lighting system: A case study for residential area in Hosur. Sustain. Cities Soc. 2019, 48, 101499.
- Pizzuti, S.; Annunziato, M.; Moretti, F. Smart street lighting management. Energy Effic. 2013, 6, 607–616.
- Marino, F.; Leccese, F.; Pizzuti, S. Adaptive street lighting predictive control. Energy Procedia 2017, 111, 790–799.
- CEN/TR 13201-2:2015; Road Lighting—Part 2: Performance requirements. European Commitee for Standardization: Brussels, Belgium, 2015.
- Agramelal, F.; Sadik, M.; Sabir, E. A Dual Carriageway Smart Street Lighting Controller Based on Multi-variate Traffic Forecast. In Proceedings of the International Conference on Advanced Intelligent Systems for Sustainable Development; Springer: Cham, Switzerland, 2022; pp. 476–488.
- Wojnicki, I.; Kotulski, L. Empirical study of how traffic intensity detector parameters influence dynamic street lighting energy consumption: A case study in Krakow, Poland. Sustainability 2018, 10, 1221.
- Tukymbekov, D.; Saymbetov, A.; Nurgaliyev, M.; Kuttybay, N.; Dosymbetova, G.; Svanbayev, Y. Intelligent autonomous street lighting system based on weather forecast using LSTM. Energy 2021, 231, 120902.
- Zamanidou, A.; Giannakopoulos, D.; Pappa, D.; Pitsilis, V.; Makropoulos, C.; Manolitsis, K. Day-ahead scheduling of a hybrid renewable energy system based on generation forecasting using a deep-learning approach. Energy Sci. Eng. 1704, 11, 1688–1704.
- Bakri, B.I.; Abid, Y.M.; Ali, G.A.; Mahdi, M.S.; Omran, A.H.; Jaber, M.M.; Jalil, M.A.; Kadhim, R.A. Using deep learning to design an intelligent controller for street lighting and power consumption. East.-Eur. J. Enterp. Technol. 2022, 117, 25–31.
- Yun, Q.; Leng, C. Intelligent control of urban lighting system based on video image processing technology. IEEE Access 2020, 8, 155506–155518.
- Yuan, X.; Tongsheng, T.; ZHENG, Y.; Kezhong, Y.; Zhiyong, X. Smart street light towards energy saving and neighborhood security. In Proceedings of the 2019 IEEE Green Energy and Smart Systems Conference (IGESSC), Long Beach, CA, USA, 4–5 November 2019; pp. 1–4.
- Umar, M.; Gill, S.; Shaikh, R.; Rizwan, M. Cloud-based energy efficient smart street lighting system. Indian J. Sci. Technol. 2020, 13, 2311–2318.
- Shoaib, A.M.; Liwen, C.; Saleem, A.; Ullah, H. Automatic street lighting system with vehicle detection using deep-learning based remote sensing. Int. J. Eng. Manag. Res. 2022, 12, 1–7.
- Chen, L.C.; Sheu, R.K.; Peng, W.Y.; Wu, J.H.; Tseng, C.H. Video-based parking occupancy detection for smart control system. Appl. Sci. 2020, 10, 1079.
- Baek, J.W.; Choi, Y.W.; Lee, J.G.; Lim, K.T. Edge camera based dynamic lighting control system for smart streetlights. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 732–734.
- Tang, R.; Zhang, C.; Tang, K.; He, X.; He, Q. An Energy-Saving Road-Lighting Control System Based on Improved YOLOv5s. Computation 2023, 11, 66.
- Asif, M.; Shams, S.; Hussain, S.; Bhatti, J.A.; Rashid, M.; Zeeshan-ul Haque, M. Adaptive Control of Streetlights Using Deep Learning for the Optimization of Energy Consumption during Late Hours. Energies 2022, 15, 6337.
- Balázs, L.; Braun, F.; Lengyel, J. Energy Saving Potential of Traffic-Regulated Street Lighting. Sustainability 2023, 15, 6750.
- Zadeh, L. Fuzzy sets. Inf. Control. 1965, 8, 338–353.
- Chen, S.; Gooi, H.; Wang, M. Solar radiation forecast based on fuzzy logic and neural networks. Renew. Energy 2013, 60, 195–201.
- Sultan, K. Fuzzy Rule Based System (FRBS) assisted Energy Efficient Controller for Smart Streetlights: An approach towards Internet-of-Things (IoT). J. Commun. 2018, 13, 518–523.
- Altun, S.N.; Dörterler, M.; Dogru, I.A. Fuzzy logic based lighting system supported with IoT for renewable energy resources. In Proceedings of the 2018 Innovations in Intelligent Systems and Applications Conference (ASYU), Adana, Turkey, 4–6 October 2018; pp. 1–4.
- Wadi, M.; Shobole, A.; Tur, M.R.; Baysal, M. Smart hybrid wind-solar street lighting system fuzzy based approach: Case study Istanbul-Turkey. In Proceedings of the 2018 6th International Istanbul Smart Grids and Cities Congress and Fair (ICSG), Istanbul, Turkey, 25–26 April 2018; pp. 71–75.
- Qian, J.; Duan, B.; Xie, W.; Zhao, Y. Edge computing for brightness and color temperature of smart streetlight. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; pp. 699–703.
- Belan, P.; Vanin, A.S.; Netzer, E. Computer vision System for Public Illumination Management. Int. J. Comput. Appl. 2020, 975, 8887.
- He, J.; Zhu, Z.; Wang, F.; Li, J. Illumination control of intelligent street lamps based on fuzzy decision. In Proceedings of the 2019 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Changsha, China, 12–13 January 2019; pp. 513–516.
- Ai, M.; Wang, P.; Ma, W. Research and application of smart streetlamp based on fuzzy control method. Procedia Comput. Sci. 2021, 183, 341–348.
- Volosencu, C.; Curiac, D.I.; Banias, O.; Ferent, C.; Pescaru, D.; Doboli, A. Hierarchical approach for intelligent lighting control in future urban environments. In Proceedings of the 2008 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–25 May 2008; Volume 1, pp. 158–163.
- Elejoste, P.; Angulo, I.; Perallos, A.; Chertudi, A.; Zuazola, I.J.G.; Moreno, A.; Azpilicueta, L.; Astrain, J.J.; Falcone, F.; Villadangos, J. An easy to deploy street light control system based on wireless communication and LED technology. Sensors 2013, 13, 6492–6523.
- Kim, T.Y.; Park, N.H. Design of path prediction smart street lighting system on the Internet of Things. J. Chosun. Nat. Sci. 2019, 12, 14–19.
- Klimek, R.; Rogus, G. Modeling context-aware and agent-ready systems for the outdoor smart lighting. In Proceedings of the Artificial Intelligence and Soft Computing: 13th International Conference, ICAISC 2014, Zakopane, Poland, 1–5 June 2014; Proceedings, Part II 13; Springer: Cham, Switzerland, 2014; pp. 257–268.
- Klimek, R. Proposal of a multi-agent system for a smart outdoor lighting environment. In Proceedings of the Artificial Intelligence and Soft Computing: 16th International Conference, ICAISC 2017, Zakopane, Poland, 11–15 June 2017; Proceedings, Part II 16; Springer: Cham, Switzerland, 2017; pp. 255–266.
- Casavola, A.; Franzè, G.; Gagliardi, G.; Tedesco, F. Improving Lighting Efficiency for Traffic Road Networks: A Reputation Mechanism Based Approach. IEEE Trans. Control. Netw. Syst. 2022, 9, 1743–1753.
- Escolar, S.; Carretero, J.; Marinescu, M.C.; Chessa, S. Estimating energy savings in smart street lighting by using an adaptive control system. Int. J. Distrib. Sens. Netw. 2014, 10, 971587.
- do Nascimento, N.M.; de Lucena, C.J.P. Engineering cooperative smart things based on embodied cognition. In Proceedings of the 2017 NASA/ESA Conference on Adaptive Hardware and Systems (AHS), Pasadena, CA, USA, 24–27 July 2017; pp. 109–116.
- Nascimento, N.; Alencar, P.; Lucena, C.; Cowan, D. Machine Learning-based Variability Handling in IoT Agents. arXiv 2018, arXiv:1802.03858.
- Moghadam, M.H.; Mozayani, N. A street lighting control system based on holonic structures and traffic system. In Proceedings of the 2011 3rd International Conference on Computer Research and Development, Shanghai, China, 11–13 March 2011; Volume 1, pp. 92–96.
- Kviesis, K.; Adrian, L.R.; Avotins, A.; Tetervenoks, O.; Repole, D. MAS Concept for PIR Sensor-Based Lighting System Control Applications. In Proceedings of the 2020 IEEE 8th Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE), Vilnius, Lithuania, 22–24 April 2021; pp. 1–5.
- Chen, Z.; Li, M.; Liu, P.; Fan, S. An Intelligent Lighting Control System for Urban Street Lamps Using Internet of Things. Mob. Inf. Syst. 2022, 2022, 5678532.
- Hu, Y.; Wu, J.; Shi, T.; Ding, L. Research and design based on smart street lights network and adaptive dimming method. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020; Volume 1654, pp. 1–8.
- Deepaisarn, S.; Yiwsiw, P.; Chaisawat, S.; Lerttomolsakul, T.; Cheewakriengkrai, L.; Tantiwattanapaibul, C.; Buaruk, S.; Sornlertlamvanich, V. Automated Street Light Adjustment System on Campus with AI-Assisted Data Analytics. Sensors 2023, 23, 1853.
- Baumgärtner, L.; Höchst, J.; Lampe, P.; Mogk, R.; Sterz, A.; Weisenburger, P.; Mezini, M.; Freisleben, B. Smart street lights and mobile citizen apps for resilient communication in a digital city. In Proceedings of the 2019 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 17–20 October 2019; pp. 1–8.
- Mukta, M.Y.; Rahman, M.A.; Asyhari, A.T.; Bhuiyan, M.Z.A. IoT for energy efficient green highway lighting systems: Challenges and issues. J. Netw. Comput. Appl. 2020, 158, 102575.
- Do, T.H.; Yoo, M. Visible light communication based vehicle positioning using LED street light and rolling shutter CMOS sensors. Opt. Commun. 2018, 407, 112–126.
- He, J.; Zhou, B. Vehicle positioning scheme based on visible light communication using a CMOS camera. Opt. Express 2021, 29, 27278–27290.
- Zadobrischi, E. Analysis and experiment of wireless optical communications in applications dedicated to mobile devices with applicability in the field of road and pedestrian safety. Sensors 2022, 22, 1023.
- Albraheem, L.I.; Alhudaithy, L.H.; Aljaser, A.A.; Aldhafian, M.R.; Bahliwah, G.M. Toward designing a Li-Fi-based hierarchical IoT architecture. IEEE Access 2018, 6, 40811–40825.
- Chopra, S.R.; Kumar, S.; Kumar, N.; Balakrishna, S.; Jha, A. Smart highway navigation system with toll collector using Li-Fi. In Proceedings of the AIP Conference Proceedings; AIP Publishing: College Park, MD, USA, 2022; Volume 2421, p. 050004.
- Ibhaze, A.E.; Orukpe, P.E.; Edeko, F.O. Li-Fi prospect in Internet of things network. In Proceedings of the Advances in Information and Communication: Proceedings of the 2020 Future of Information and Communication Conference (FICC); Springer: Cham, Switzerland, 2020; Volume 1, pp. 272–280.
- Bruno, S.; Giannoccaro, G.; La Scala, M.; Lopopolo, G.; Rodio, C. A microgrid architecture for integrating EV charging system and public street lighting. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–5.
- Simović, U.; Clémençon-Charles, E.; Flignor, M. Let There Be Charge: Using Streetlights to Enable Vehicle Electrification. Clim. Energy 2022, 39, 1–8.
- Divyapriya, S.; Amudha, A.; Vijayakumar, R. Design of solar smart street light powered plug-in electric vehicle charging station by using internet of things. J. Inst. Eng. (India) Ser. B 2021, 102, 477–486.
- Yaman, O.; Karakose, M. New approach for intelligent street lights using computer vision and wireless sensor networks. In Proceedings of the 2019 7th International Istanbul Smart Grids and Cities Congress and Fair (ICSG), Istanbul, Turkey, 25–26 April 2019; pp. 81–85.
- Rajendhar, P.; Belwin Edward, J.; Jacob Raglend, I. Energy-Efficient and Emergency Dispatch System for Smart Street Lighting. In Proceedings of the Advances in Automation, Signal Processing, Instrumentation, and Control: Select Proceedings of i-CASIC 2020; Springer: Singapore, 2021; pp. 3221–3233.
- Alvarez, R.; Duarte, F.; Frenchman, D.; Ratti, C. Sensing Lights: The Challenges of Transforming Street Lights into an Urban Intelligence Platform. J. Urban Technol. 2022, 29, 25–40.
- Singh, R.; Sharma, R.; Akram, S.V.; Gehlot, A.; Buddhi, D.; Malik, P.K.; Arya, R. Highway 4.0: Digitalization of highways for vulnerable road safety development with intelligent IoT sensors and machine learning. Saf. Sci. 2021, 143, 105407.
- Ahmad, H.; Naseer, K.; Asif, M.; Alam, M.F. Smart street light system powered by footsteps. In Proceedings of the 2019 International Conference on Green and Human Information Technology (ICGHIT), Kuala Lumpur, Malaysia, 15–17 January 2019; pp. 122–124.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
4.9K
Revisions:
2 times
(View History)
Update Date:
07 Nov 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No