Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Mohammed Ali Khan | -- | 1707 | 2023-10-30 09:10:50 | | | |
| 2 | Sirius Huang | Meta information modification | 1707 | 2023-10-31 02:09:59 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Singh, R.; Kurukuru, V.S.B.; Khan, M.A. Advanced Power Converters in Robotics. Encyclopedia. Available online: https://encyclopedia.pub/entry/50918 (accessed on 24 July 2026).
Singh R, Kurukuru VSB, Khan MA. Advanced Power Converters in Robotics. Encyclopedia. Available at: https://encyclopedia.pub/entry/50918. Accessed July 24, 2026.
Singh, Rupam, Varaha Satya Bharath Kurukuru, Mohammed Ali Khan. "Advanced Power Converters in Robotics" Encyclopedia, https://encyclopedia.pub/entry/50918 (accessed July 24, 2026).
Singh, R., Kurukuru, V.S.B., & Khan, M.A. (2023, October 30). Advanced Power Converters in Robotics. In Encyclopedia. https://encyclopedia.pub/entry/50918
Singh, Rupam, et al. "Advanced Power Converters in Robotics." Encyclopedia. Web. 30 October, 2023.
Copy Citation
The effectiveness and performance of the robot’s manipulative actions in any field of operation primarily depend on the dynamic response of its internal drive system. Power converters play a pivotal role in robotics by facilitating efficient energy conversion and management.
robotics
power converters
energy management
1. Introduction
Industrial robots have a wide range of applications across various industries, including tasks like handling, painting, assembly, welding and more [1][2][3]. In fields like autonomous vehicles, machine-learning algorithms process sensor data to make real-time decisions, enabling vehicles to navigate and respond intelligently to complex environments [4][5][6]. In healthcare, robots equipped with AI can assist in surgeries, diagnose illnesses and even provide emotional support to patients [7][8][9]. Manufacturing processes are streamlined through AI-driven robotics that optimize production lines and adapt to changing demands [10][11].
The integration of AI and machine learning with robotics also enhance the development of human–robot collaboration. Robots can understand and adapt to human behavior, making them safer and more intuitive to work alongside. The effectiveness and performance of the robot’s manipulative actions in any field of operation primarily depend on the dynamic response of its internal drive system [12][13]. This internal drive system has several impacts on the environment, depending on its design, efficiency and energy source. This concept encompasses the idea of robots being able to adapt, improve and learn from their interactions with their environment, tasks and humans.The control and conversion of electrical energy is responsible for highly efficient robotic systems such as when a robot performs a mix of high-energy and low-energy tasks; learning-based control can allocate energy resources dynamically [14][15][16]. It can optimize power distribution to different actuators based on the priority of tasks. They aim to optimize the efficiency of energy transfer from the power source to the actuators. This is particularly important in robotics, where energy efficiency translates to longer battery life, reduced heat generation and overall better performance [17][18].
2. Advanced Power Converters in Robotics
Power converters play a pivotal role in robotics by facilitating efficient energy conversion and management [16][19]. In this section, the significance of power converters in robotics is discussed, as well as the various types utilized, recent technological advancements and case studies, highlighting their influence on robotic performance and energy efficiency. Figure 1 illustrates the schematic representation of the robotic system’s partitioning, shedding light on the essential components that collectively enable the robot’s operation.
2.1. Role of Power Converters in Robotics
In the dynamic landscape of robotics, where energy-efficient operation is predominant, power converters serve as the bridge between energy sources and the electrical demands of robotic subsystems [14][20]. The role of power converters encompasses several key aspects:
-
Voltage Regulation: Robotic systems incorporate components with diverse voltage requirements. Power converters provide efficient voltage regulation, ensuring that sensors, microcontrollers and other components receive the appropriate voltage levels. This not only prevents potential damage due to overvoltage but also maximizes the efficiency of these components [19][21].
-
Current Management: Motors and actuators, crucial for robotic motion and manipulation, often require varying current levels [22]. Power converters enable precise current control, allowing dynamic adjustment to match the specific demands of each task. This adaptability results in optimized motor performance and enhanced control accuracy [23].
-
Waveform Shaping: Certain robotic components require specific waveform characteristics, such as sinusoidal signals for AC motors. Power converters facilitate waveform shaping, converting DC power to AC with the desired frequency and amplitude, thereby enabling precise control over motor behavior [24][25].
-
Energy Efficiency: By minimizing energy losses during conversion and distribution, power converters contribute significantly to overall energy efficiency in robotic systems. Efficient power conversion reduces wasted energy as heat, leading to prolonged operational times and reduced battery replacements [14][19].
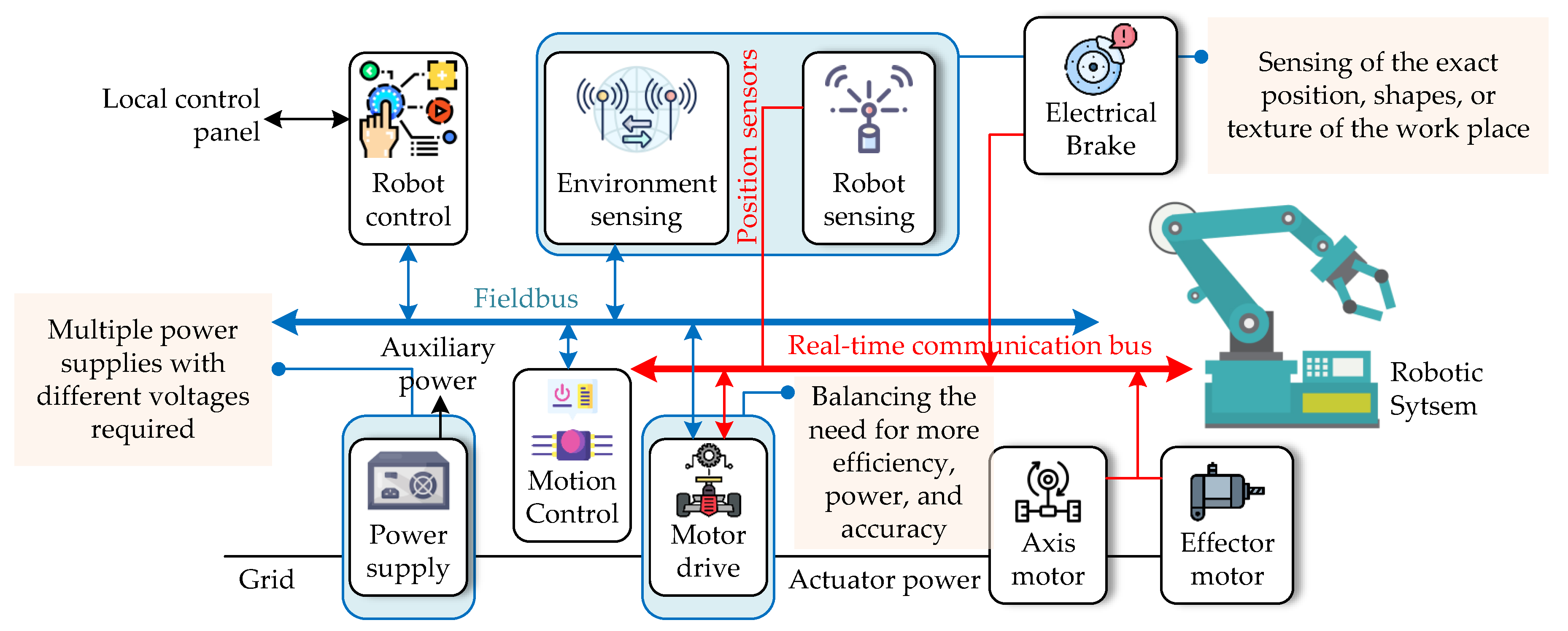
Figure 1. Schematic Representation of Robotic System Partitioning, highlighting the integration of Power Supplies, Converters, Control Box and Sensing Systems for the Robot’s Operation.
2.2. Types of Power Converters in Robotics
The complex landscape of robotic applications necessitates a spectrum of power-converter types tailored to specific demands. Figure 2 presents an overview of the power-converter technologies that find applications across various robotic systems.
2.2.1. DC–DC Converters
DC–DC converters are pivotal in robotics, providing voltage step-up or step-down capabilities. For instance, in battery-powered robots, where the available voltage decreases as the battery discharges, DC–DC converters maintain stable voltage levels for critical components. Additionally, as robots integrate sensors and actuators with distinct voltage requirements, these converters ensure compatibility across the system [26].
2.2.2. DC–AC Converters
In robotics, DC–AC converters or inverters play a central role in converting DC power from batteries to AC power for motor-driven systems [27]. Advanced inverter technologies, including advanced modulation schemes like sinusoidal pulse width modulation (SPWM), enable precise control over AC motor characteristics, such as torque, speed and position. This level of control enhances robotic locomotion, manipulation and even aerial operations [28].
2.2.3. AC–DC Converters
AC–DC converters or rectifiers are essential for robotic systems that require power input from alternating current (AC) sources [29]. These converters not only rectify AC power to DC for internal use but also allow robots to draw power directly from AC grids. Charging stations for electric robots, as well as industrial robots operating in environments with readily available AC power, benefit from AC–DC converters.
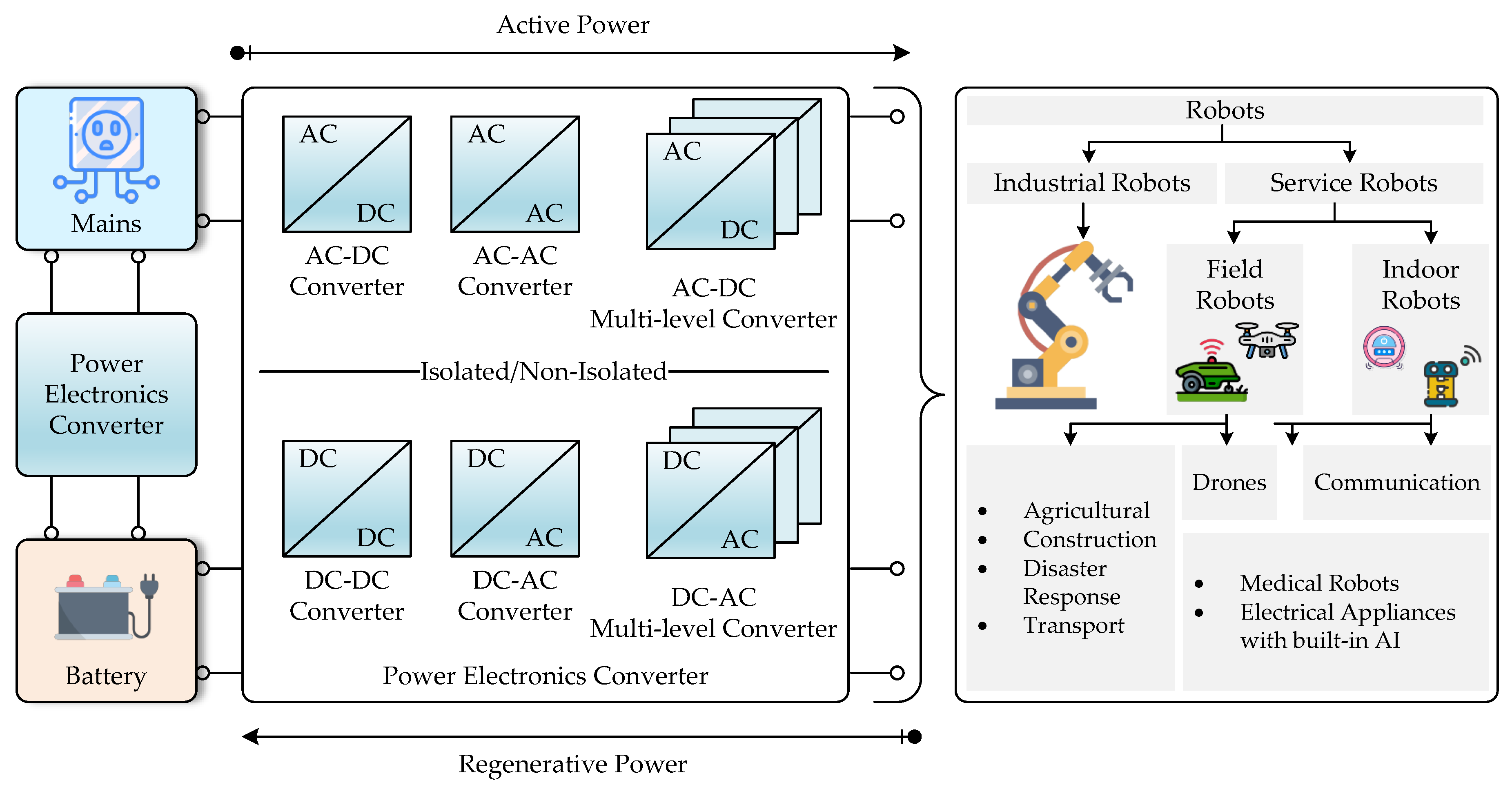
Figure 2. Power Converters for Diverse Robotic Applications.
2.2.4. Resonant Converters
Resonant converters utilize resonant components to achieve efficient power conversion with reduced switching losses. This feature makes them valuable for wireless power-transfer applications within robotics, enabling energy delivery without physical connections [30]. Resonant converters are employed in scenarios like charging robotic devices over short distances or even wirelessly powering sensors in remote locations [31][32].
2.2.5. Multi-Level Converters
Robotic systems often demand power converters that can handle high voltages while minimizing harmonic distortion. Multi-level converters achieve this by generating stepped voltage waveforms, reducing stress on components and improving overall system efficiency [33][34]. Applications include high-power robotic arms, where precise motion control requires efficient and high-voltage power conversion.
2.2.6. Soft-Switching Converters
Soft-switching converters focus on reducing switching losses during power conversion. These converters utilize techniques like Zero Voltage Switching (ZVS) and Zero Current Switching (ZCS) to minimize stress on semiconductor devices, leading to improved efficiency and reduced electromagnetic interference (EMI) [35]. In robotics, soft-switching converters find use in high-frequency motor drives and precision robotics that demand minimal energy loss and EMI [36].
2.2.7. Matrix Converters
Matrix converters perform direct AC–AC conversion without intermediate DC links [37]. This feature offers advantages in terms of efficiency, size and reduced components. In robotics, matrix converters can be applied to variable-speed motor drives and actuators [38], facilitating fine-tuned control and efficient power management.
2.2.8. Dual Active Bridge Converters
Dual Active Bridge (DAB) converters provide bidirectional AC–DC conversion, enabling power flow in both directions. This characteristic suits applications where energy regeneration and grid connection are important, such as grid-tied robotics or robots operating in dynamic environments where power needs fluctuate [39].
By understanding and harnessing the capabilities of these advanced power converters, robotics can achieve higher levels of performance, efficiency and adaptability across a wide range of applications. Table 1 provides a comprehensive overview of the key advancements in power-converter technologies for robotics, highlighting the benefits they offer and the specific applications where they find utility. These advancements represent critical milestones in the evolution of robotic systems, enabling enhanced performance, efficiency and adaptability.
Table 1. Key Advancements in Power-Converter Technologies for Robotics, along with their Benefits and Applications.
| Power Converter | Key Features | Voltage Regulation Range | Efficiency Range | Switching Frequency | Robotics Applications |
|---|---|---|---|---|---|
| Buck Converter [40] | Step-down voltage conversion | Narrow to Moderate | High | Medium to High | Battery-powered robots, sensor nodes |
| Boost Converter [41] | Step-up voltage conversion | Moderate | High | Medium to High | Energy harvesting, charging mobile robots |
| Buck-Boost Converter [42] | Bidirectional voltage conversion | Wide | High | Medium to High | Battery management, variable power demands |
| Resonant Converter [31][32] | Zero-voltage switching, reduced EMI | Wide | Moderate to High | Medium to High | Wireless power transfer, contactless charging |
| Multi-level Converter [33][34] | Reduced harmonics, high voltage capability | Wide | High | Medium to High | High-power robotic arms, electric vehicles |
| Matrix Converter [37][38] | Bi-directional AC–AC conversion | Wide | High | Medium to High | Variable-speed motor drives, robotic actuators |
| Soft-Switching Converters [35][36] | Minimal switching losses | Moderate to Wide | High | High | High-frequency motor drives, precision robotics |
| Dual Active Bridge Converter [39] | Bidirectional AC–DC conversion | Moderate | High | Medium to High | Grid-tied robotics, energy-efficient actuators |
2.3. Advancements in Power-Converter Technologies for Robotics
Robotic systems are witnessing transformative impacts due to advancements in power-converter technologies. Table 2 highlights several significant advancements in power-converter technologies for robotics. These advancements are tailored to address the unique challenges and opportunities in robotics.
2.3.1. Integration of Wide-Bandgap Semiconductors
Wide-bandgap materials, notably silicon carbide (SiC) and gallium nitride (GaN), have revolutionized power-converter design. The unique material properties of SiC and GaN enable higher operating temperatures, reduced conduction and switching losses and faster switching speeds [43][44]. In robotics, this translates to increased power-converter efficiency, reduced cooling requirements and improved power density. These benefits are particularly relevant for robots operating in extreme environments, such as industrial automation, space exploration and search-and-rescue missions [45][46].
2.3.2. Enhanced High-Frequency Operation
Robotics often demands compactness and agility. Advancements in high-frequency operation have enabled power converters to operate at frequencies beyond conventional limits [47]. Higher switching frequencies allow for the miniaturization of passive components like inductors and capacitors, resulting in more compact converter designs. This is pivotal in creating lightweight robots that exhibit improved agility, responsiveness and energy efficiency [48][49].
Table 2. Advancements in Power-Converter Technologies for Robotics.
| Advancement | Description | Benefits | Applications |
|---|---|---|---|
| GaN Transistors [50][51] | High-efficiency, fast-switching transistors enabling compact power converters. | Reduced power losses, smaller form factors, improved thermal management. | Industrial robots, drones, electric vehicles. |
| SiC Devices [52] | High-temperature, high-power devices for efficient and reliable converters. | Higher power handling, reduced cooling requirements, better performance in harsh environments. | Electric propulsion, extreme environment robotics. |
| Digital Power Management [53][54] | Real-time parameter adjustment for adaptable and efficient converters. | Improved adaptability, energy efficiency, remote monitoring. | Mobile robots, medical robots, automation. |
| Resonant Converter Topologies [55][56][57] | Reduced switching losses, high efficiency, low electromagnetic interference. | Improved efficiency, reduced heat, less EMI. | Renewable energy, wireless charging. |
| Hybrid and Multilevel Converters [58][59] | Combined topologies for efficiency and voltage control. | Enhanced efficiency, reduced distortion, improved voltage control. | Electric grids, robotic vehicles, renewables. |
| Advanced Cooling Techniques [60][61][62] | Innovative cooling for efficient operation in confined spaces. | Improved thermal management, higher power handling, compact designs. | High Performance Computing (HPC) clusters, motor drives, confined spaces. |
| Advanced Control Algorithms [63][64][65] | Precise regulation for changing conditions and loads. | Enhanced accuracy, better response, improved stability. | Prosthetics, haptics, precision control. |
| Wireless Power Transfer [50][66][67] | Wireless charging for convenience and seamless integration. | Convenience, reduced wear, seamless integration. | Mobile robotics, drones, underwater robots. |
References
- Bartoš, M.; Bulej, V.; Bohušík, M.; Stanček, J.; Ivanov, V.; Macek, P. An overview of robot applications in the automotive industry. Transp. Res. Procedia 2021, 55, 837–844.
- Chodha, V.; Dubey, R.; Kumar, R.; Singh, S.; Kaur, S. Selection of industrial arc welding robot with TOPSIS and Entropy MCDM techniques. Mater. Today Proc. 2022, 50, 709–715.
- Sherwani, F.; Asad, M.M.; Ibrahim, B.S.K.K. Collaborative Robots and Industrial Revolution 4.0 (IR 4.0). In Proceedings of the 2020 International Conference on Emerging Trends in Smart Technologies (ICETST), Karachi, Pakistan, 26–27 March 2020; pp. 1–5.
- Muhammad, K.; Ullah, A.; Lloret, J.; Del Ser, J.; de Albuquerque, V.H.C. Deep learning for safe autonomous driving: Current challenges and future directions. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4316–4336.
- Khayyam, H.; Javadi, B.; Jalili, M.; Jazar, R.N. Artificial intelligence and internet of things for autonomous vehicles. In Nonlinear Approaches in Engineering Applications: Automotive Applications of Engineering Problems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 39–68.
- Vishnukumar, H.J.; Butting, B.; Müller, C.; Sax, E. Machine learning and deep neural network—Artificial intelligence core for lab and real-world test and validation for ADAS and autonomous vehicles: AI for efficient and quality test and validation. In Proceedings of the 2017 Intelligent Systems Conference (IntelliSys), London, UK, 7–8 September 2017; IEEE: Piscataway, NJ, USA, 2017.
- Lee, D.; Yoon, S.N. Application of artificial intelligence-based technologies in the healthcare industry: Opportunities and challenges. Int. J. Environ. Res. Public Health 2021, 18, 271.
- Alugubelli, R. Exploratory study of artificial intelligence in healthcare. Int. J. Innov. Eng. Res. Technol. 2016, 3, 1–10.
- Denecke, K.; Claude R., B. A review of artificial intelligence and robotics in transformed health ecosystems. Front. Med. 2022, 9, 795957.
- Castañé, G.; Dolgui, A.; Kousi, N.; Meyers, B.; Thevenin, S.; Vyhmeister, E.; Östberg, P.-O. The ASSISTANT project: AI for high level decisions in manufacturing. Int. J. Prod. Res. 2023, 61, 2288–2306.
- Sjödin, D.R.; Parida, V.; Leksell, M.; Petrovic, A. Smart Factory Implementation and Process Innovation: A Preliminary Maturity Model for Leveraging Digitalization in Manufacturing. Moving to smart factories presents specific challenges that can be addressed through a structured approach focused on people, processes and technologies. Res. Technol. Manag. 2018, 61, 22–31.
- Alami, R.; Albu-Schaeffer, A.; Bicchi, A.; Bischoff, R.; Chatila, R.; De Luca, A.; De Santis, A.; Giralt, G.; Guiochet, J.; Hirzinger, G.; et al. Safe and Dependable Physical Human-Robot Interaction in Anthropic Domains: State of the Art and Challenges. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006.
- Smith, C.; Karayiannidis, Y.; Nalpantidis, L.; Gratal, X.; Qi, P.; Dimarogonas, D.V.; Kragic, D. Dual Arm Manipulation—A Survey. Robot. Auton. Syst. 2012, 60, 1340–1353.
- Carabin, G.; Wehrle, E.; Vidoni, R. A Review on Energy-Saving Optimization Methods for Robotic and Automatic Systems. Robotics 2017, 6, 39.
- Mantha, B.R.K.; Jung, M.K.; García de Soto, B.; Menassa, C.C.; Kamat, V.R. Generalized task allocation and route planning for robots with multiple depots in indoor building environments. Autom. Constr. 2020, 119, 103359.
- Ahmad, T.; Zhu, H.; Zhang, D.; Tariq, R.; Bassam, A.; Ullah, F.; AlGhamdi, A.S.; Alshamrani, S.S. Energetics Systems and artificial intelligence: Applications of industry 4.0. Energy Rep. 2022, 8, 334–361.
- Mazumdar, A.; Spencer, S.J.; Hobart, C.; Salton, J.; Quigley, M.; Wu, T.; Bertrand, S.; Pratt, J.; Buerger, S.P. Parallel elastic elements improve energy efficiency on the STEPPR bipedal walking robot. IEEE/ASME Trans. Mechatronics 2016, 22, 898–908.
- Fisk, W.J. Health and productivity gains from better indoor environments and their relationship with building energy efficiency. Annu. Rev. Energy Environ. 2000, 25, 537–566.
- Mikołajczyk, T.; Mikołajewski, D.; Kłodowski, A.; Łukaszewicz, A.; Mikołajewska, E.; Paczkowski, T.; Macko, M.; Skornia, M. Energy Sources of Mobile Robot Power Systems: A Systematic Review and Comparison of Efficiency. Appl. Sci. 2023, 13, 7547.
- Paryanto; Brossog, M.; Bornschlegl, M.; Franke, J. Reducing the energy consumption of industrial robots in manufacturing systems. Int. J. Adv. Manuf. Technol. 2015, 78, 1315–1328.
- Wang, J.; Chortos, A. Control Strategies for Soft Robot Systems. Adv. Intell. Syst. 2022, 4, 2100165.
- Lewis, F.L.; Kreith, F. (Eds.) Robotics. In Mechanical Engineering Handbook; CRC Press LLC: Boca Raton, FL, USA, 1999.
- Afifa, R.; Ali, S.; Pervaiz, M.; Iqbal, J. Adaptive Backstepping Integral Sliding Mode Control of a MIMO Separately Excited DC Motor. Robotics 2023, 12, 105.
- Lorenz, R.D.; Lipo, T.A.; Novotny, D.W. Motion Control with Induction Motors. Proc. IEEE 1994, 82, 1215–1240.
- Dario, P.; Bergamasco, M. An advanced robot system for automated diagnostic tasks through palpation. IEEE Trans. Biomed. Eng. 1988, 35, 118–126.
- Forouzesh, M.; Siwakoti, Y.P.; Gorji, S.A.; Blaabjerg, F.; Lehman, B. Step-Up DC–DC Converters: A Comprehensive Review of Voltage-Boosting Techniques, Topologies and Applications. IEEE Trans. Power Electron. 2017, 32, 9143–9178.
- Musumeci, S.; Mandrile, F.; Barba, V.; Palma, M. Low-Voltage GaN FETs in Motor Control Application; Issues and Advantages: A Review. Energies 2021, 14, 6378.
- Arrigo, D.; Adragna, C.; Marano, V.; Pozzi, R.; Pulicelli, F.; Pulvirenti, F. The Next “Automation Age”: How Semiconductor Technologies Are Changing Industrial Systems and Applications. In Proceedings of the ESSCIRC 2022-IEEE 48th European Solid State Circuits Conference (ESSCIRC), Milan, Italy, 19–22 September 2022; pp. 17–24.
- Paul, S.; Lee, D.; Kim, K.; Chang, J. Nonlinear modeling and performance testing of high-power electromagnetic energy harvesting system for self-powering transmission line vibration deicing robot. Mech. Syst. Signal Process. 2021, 151, 107369.
- Moradewicz, A.J.; Kazmierkowski, M.P. Contactless Energy Transfer System with FPGA-Controlled Resonant Converter. IEEE Trans. Ind. Electron. 2010, 57, 3181–3190.
- Kikuchi, S.; Sakata, T.; Takahashi, E.; Kanno, H. Development of Wireless Power Transfer System for Robot Arm with Rotary and Linear Movement. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 1616–1621.
- Barman, S.D.; Reza, A.W.; Kumar, N.; Karim, M.E.; Munir, A.B. Wireless powering by magnetic resonant coupling: Recent trends in wireless power transfer system and its applications. Renew. Sustain. Energy Rev. 2015, 51, 1525–1552.
- Urrea, C.; Jara, D. Design, Analysis and Comparison of Control Strategies for an Industrial Robotic Arm Driven by a Multi-Level Inverter. Symmetry 2021, 13, 86.
- Ghani, M.A.; Mallet, J. Switched capacitors multilevel converter design for robotics application employing arduino microcontroller. In Proceedings of the 2014 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Kuala Lumpur, Malaysia, 12–15 November 2014; pp. 472–476.
- Ivanovic, B.; Stojiljkovic, Z. A novel active soft switching snubber designed for boost converter. IEEE Trans. Power Electron. 2004, 19, 658–665.
- Hasanpour, S.; Forouzesh, M.; Siwakoti, Y.P.; Blaabjerg, F. A Novel Full Soft-Switching High-Gain DC/DC Converter Based on Three-Winding Coupled-Inductor. IEEE Trans. Power Electron. 2021, 36, 12656–12669.
- Rohouma, W.; Zanchetta, P.; Wheeler, P.W.; Empringham, L. A Four-Leg Matrix Converter Ground Power Unit with Repetitive Voltage Control. IEEE Trans. Ind. Electron. 2015, 62, 2032–2040.
- Szczesniak, P.; Urbanski, K.; Fedyczak, Z.; Zawirski, K. Comparative study of drive systems using vector-controlled PMSM fed by a matrix converter and a conventional frequency converter. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 59.
- Hao, K.; Lu, J. Modeling Research of Dual Active Bridge DC Converter Based on Double Phase Shift Control. In Proceedings of the 2019 3rd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 1–3 June 2019; pp. 79–84.
- Wong, L.H.; Sivanesan, S.; Faisol, M.F.A.; Othman, W.A.F.W.; Wahab, A.A.A.; Alhady, S.S.N. Development of quadruped walking robot with passive compliance legs using XL4005 buck converter. J. Phys. Conf. Ser. 2021, 1969, 012003.
- Abidin, Z.; Faridzi, M.A.; Siwindarto, P. Design of Solenoid Based Kicker with ZVS Boost Converter for Wheeled Soccer Robot. In Proceedings of the 2023 International Electronics Symposium (IES), Denpasar, Indonesia, 8–10 August 2023; pp. 150–154.
- Cruz-Lambert, J.; Benavidez, P.; Ortiz, J.; Richey, J.; Morris, S.; Gallardo, N.; Jamshidi, M. Converter design for solar powered outdoor mobile robot. In Proceedings of the 2016 World Automation Congress (WAC), Rio Grande, PR, USA, 3 July–4 August 2016; pp. 1–6.
- Truong, T.-A.; Nguyen, T.K.; Huang, X.; Ashok, A.; Yadav, S.; Park, Y.; Thai, M.T.; Nguyen, N.-K.; Fallahi, H.; Peng, S.; et al. Engineering Route for Stretchable, 3D Microarchitectures of Wide Bandgap Semiconductors for Biomedical Applications. Adv. Funct. Mater. 2023, 33, 2211781.
- Lee, W.; Li, S.; Han, D.; Sarlioglu, B.; Minav, T.A.; Pietola, M. A Review of Integrated Motor Drive and Wide-Bandgap Power Electronics for High-Performance Electro-Hydrostatic Actuators. IEEE Trans. Transp. Electrif. 2018, 4, 684–693.
- Dorigo, M.; Theraulaz, G.; Trianni, V. Swarm Robotics: Past, Present and Future . Proc. IEEE 2021, 109, 1152–1165.
- Lee, W.; Li, S.; Han, D.; Sarlioglu, B.; Minav, T.A.; Pietola, M. Achieving high-performance electrified actuation system with integrated motor drive and wide bandgap power electronics. In Proceedings of the 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. P.1–P.10.
- Nguyen, K.T.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. High-Frequency and High-Powered Electromagnetic Actuation System Utilizing Two-Stage Resonant Effects. IEEE/ASME Trans. Mechatron. 2020, 25, 2398–2408.
- Hagn, U.; Nickl, M.; Jörg, S.; Passig, G.; Bahls, T.; Nothhelfer, A.; Hacker, F.; Le-Tien, L.; Albu-Schäffer, A.; Konietschke, R.; et al. The DLR MIRO: A Versatile Lightweight Robot for Surgical Applications. Ind. Robot. 2008, 35, 324–336.
- Zhang, T.; Qian, F.; Li, C.; Masarati, P.; Hoover, A.M.; Birkmeyer, P.; Pullin, A.; Fearing, R.S.; Goldman, D.I. Ground fluidization promotes rapid running of a lightweight robot. Int. J. Robot. Res. 2013, 32, 859–869.
- Makhdoom, R.; Maji, S.; Sinha, S.; Etta, D.; Afridi, K. Multi-MHz In-Motion Capacitive Wireless Power Transfer System for Mobile Robots. In Proceedings of the 2022 Wireless Power Week (WPW), Bordeaux, France, 5–8 July 2022; pp. 1–5.
- Lidow, A.; Glaser, J. GaN-based Solutions for Cost-effective Direct and Indirect Time-of-Flight Lidar Transmitters are Changing the Way We Live. In Proceedings of the 2022 International Power Electronics Conference (IPEC-Himeji 2022- ECCE Asia), Himeji, Japan, 15–19 May 2022; pp. 637–643.
- Ino, K.; Miura, M.; Nakano, Y.; Aketa, M.; Kawamoto, N. SiC Power Device Evolution Opening a New Era in Power Electronics. In Proceedings of the 2019 IEEE International Conference on Electron Devices and Solid-State Circuits (EDSSC), Xi’an, China, 12–14 June 2019; pp. 1–3.
- Carlson, S.J.; Arora, P.; Karakurt, T.; Moore, B.; Papachristos, C. Towards Multi-Day Field Deployment Autonomy: A Long-Term Self-Sustainable Micro Aerial Vehicle Robot. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 11396–11403.
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial Capabilities of Robotics in Enhancing Industry 4.0 Implementation. Cogn. Robot. 2021, 1, 58–75.
- Chen, J.; Yang, C.; Zou, J. Robust Enhanced Voltage Range Control for Industrial Robot Chargers. IEEE Access 2022, 10, 132635–132643.
- Natarajan, S.; Kannadasan, R.; Alsaif, F.; Alsharif, M.H. Design of Novel Modified Double-Ended Forward Converter for Stepper Motor Drive. Machines 2023, 11, 777.
- Bodian, A.; Cardenas, A.; Ben Abdelghani, A.B. Double Outputs Resonant-based Wireless Charger for Electric Vehicle and Robotic Applications. In Proceedings of the 2022 5th International Conference on Advanced Systems and Emergent Technologies (IC_ASET), Hammamet, Tunisia, 22–24 March 2022; pp. 439–444.
- Silva, F.A. Advanced DC/AC Inverters: Applications in Renewable Energy (Luo, F.L. and Ye, H.; 2013) . IEEE Ind. Electron. Mag. 2013, 7, 68–69.
- Benmiloud, M.; Benalia, A. Finite-time stabilization of the limit cycle of two-cell DC/DC converter: Hybrid approach. Nonlinear Dyn. 2016, 83, 319–332.
- Moreno, G.; Narumanchi, S.; Feng, X.; Anschel, P.; Myers, S.; Keller, P. Electric-Drive Vehicle Power Electronics Thermal Management: Current Status, Challenges and Future Directions. J. Electron. Packag. 2022, 144, 011004.
- Omura, I. Power Electronics for a Future Sustainable Society. In Proceedings of the PCIM Europe 2022, International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 10–12 May 2022; pp. 1–8.
- Schellenberger, M.; Lorentz, V.; Eckardt, B. Cognitive Power Electronics—An Enabler for Smart Systems. In Proceedings of the PCIM Europe 2022; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 10–12 May 2022; pp. 1–5.
- Dian, S.; Fang, H.; Zhao, T.; Wu, Q.; Hu, Y.; Guo, R.; Li, S. Modeling and Trajectory Tracking Control for Magnetic Wheeled Mobile Robots Based on Improved Dual-Heuristic Dynamic Programming. IEEE Trans. Ind. Inform. 2021, 17, 1470–1482.
- Božek, P.; Nikitin, Y. The Development of an Optimally-Tuned PID Control for the Actuator of a Transport Robot. Actuators 2021, 10, 195.
- Dini, P.; Saponara, S. Model-Based Design of an Improved Electric Drive Controller for High-Precision Applications Based on Feedback Linearization Technique. Electronics 2021, 10, 2954.
- Zhang, Z.; Zhang, B. Omnidirectional and Efficient Wireless Power Transfer System for Logistic Robots. IEEE Access 2020, 8, 13683–13693.
- Zhang, J.; Zhao, J.; Zhang, Y.; Deng, F. A Wireless Power Transfer System With Dual Switch-Controlled Capacitors for Efficiency Optimization. IEEE Trans. Power Electron. 2020, 35, 6091–6101.
More
Information
Subjects:
Engineering, Electrical & Electronic
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
2.0K
Revisions:
2 times
(View History)
Update Date:
31 Oct 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No