 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Borja Bordel Sánchez | -- | 1087 | 2023-09-13 10:18:19 | | | |
| 2 | Alfred Zheng | Meta information modification | 1087 | 2023-09-13 10:20:32 | | |
Video Upload Options
Vehicle-to-Vehicle (V2V) networks, specifically Vehicular Ad Hoc Networks (VANETs), are central to enhancing road safety by improving vehicle visibility, particularly when traditional onboard sensors fall short. The crucial role that VANETs play in modern transportation systems is increasingly being recognized, with the ability to facilitate real-time communication between vehicles, improving situational awareness, and thereby enhancing road safety. However, the accuracy, integrity and security of these data are of paramount importance, as any inaccuracies or compromises could lead to incorrect hazard perception and possibly catastrophic consequences. Hence, substantial effort is required to maintain these data characteristics while enabling efficient and rapid data exchange.
1. Introduction
2. Obstacle Detection and Mapping in Vehicle-to-Vehicle Networks
References
- Li, S.; Da Xu, L.; Zhao, S. The internet of things: A survey. Inf. Syst. Front. 2015, 17, 243–259.
- Rosen, P.; Underwood, S.; Zacharias, G. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2015.
- Rawashdeh, Z.Y.; Mahmud, S.M. A novel algorithm to form stable clusters in vehicular ad hoc networks on highways. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 15.
- Dwivedi, S.K.; Amin, R.; Das, A.K.; Leung, M.T.; Choo, K.K.R.; Vollala, S. Blockchain-based vehicular ad-hoc networks: A comprehensive survey. Ad Hoc Netw. 2022, 137, 102980.
- Nakamoto, S. Bitcoin: A Peer-to-Peer Electronic Cash System. Decentralized Business Review. 2008. Available online: https://bitcoin.org/bitcoin.pdf (accessed on 9 August 2023).
- Baras, S.; Saeed, I.; Tabaza, H.A.; Elhadef, M. VANETs-based intelligent transportation systems: An overview. Adv. Comput. Sci. Ubiquitous Comput. CSA-CUTE 2018, 17, 265–273.
- Daeinabi, A.; Rahbar, A.G. Detection of malicious vehicles (DMV) through monitoring in vehicular ad-hoc networks. Multimed. Tools Appl. 2013, 66, 325–338.
- Liao, S.; Wu, J.; Bashir, A.K.; Yang, W.; Li, J.; Tariq, U. Digital twin consensus for blockchain-enabled intelligent transportation systems in smart cities. IEEE Trans. Intell. Transp. Syst. 2021, 23, 22619–22629.
- Benslimane, A.; Taleb, T.; Sivaraj, R. Dynamic clustering-based adaptive mobile gateway management in integrated VANET—3G heterogeneous wireless networks. IEEE J. Sel. Areas Commun. 2011, 29, 559–570.
- Nakrani, N.M.; Joshi, M.M. A human-like decision intelligence for obstacle avoidance in autonomous vehicle parking. Appl. Intell. 2022, 52, 3728–3747.
- Aggarwal, C.C. Neural Networks and Deep Learning; Springer: Berlin/Heidelberg, Germany, 2018.
- Levinson, J.; Askeland, J.; Becker, J.; Dolson, J.; Held, D.; Kammel, S.; Zico Kolter, J.; Langer, D.; Pink, O.; Pratt, V.; et al. Towards fully autonomous driving: Systems and algorithms. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 163–168.
- Siyal, A.A.; Junejo, A.Z.; Zawish, M.; Ahmed, K.; Khalil, A.; Soursou, G. Applications of blockchain technology in medicine and healthcare: Challenges and future perspectives. Cryptography 2019, 3, 3.
- Lin, J.; Shen, Z.; Zhang, A.; Chai, Y. Blockchain and IoT based food traceability for smart agriculture. In Proceedings of the 3rd International Conference on Crowd Science and Engineering (ICCSE), Singapore, 28–31 July 2018.
- Kim, S. Impacts of mobility on performance of blockchain in VANET. IEEE Access 2019, 7, 68646–68655.
- Shrestha, R.; Bajracharya, R.; Shrestha, A.P.; Nam, S.Y. A new type of blockchain for secure message exchange in VANET. Digit. Commun. Netw. 2020, 6, 177–186.
- Ma, Z.; Zhang, J.; Guo, Y.; Liu, Y.; Liu, X.; He, W. An efficient decentralized key management mechanism for VANET with blockchain. IEEE Trans. Veh. Technol. 2020, 69, 5836–5849.
- Luo, B.; Li, X.; Weng, J.; Guo, J.; Ma, J. Blockchain enabled trust-based location privacy protection scheme in VANET. IEEE Trans. Veh. Technol. 2019, 69, 2034–2048.
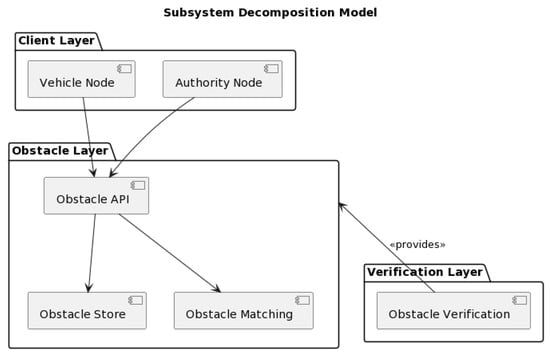
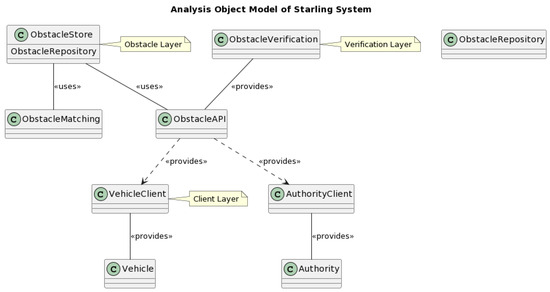
- Miehle, D.; Pfurtscheller, A.; Bruegge, B. Starling: A Blockchain-based System for Coordinated Obstacle Mapping in Dynamic Vehicular Environments. In Proceedings of the 53rd Hawaii International Conference on System Sciences, Maui, HI, USA, 7–10 January 2020; pp. 4033–4042.
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616.
- Saad, M.; Khan, M.K.; Ahmad, M.B. Blockchain-enabled vehicular ad hoc networks: A systematic literature review. Sustainability 2022, 14, 3919.
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge computing: Vision and challenges. IEEE Internet Things J. 2016, 3, 637–646.
- Papadimitratos, P.; De La Fortelle, A.; Evenssen, K.; Brignolo, R.; Cosenza, S. Vehicular communication systems: Enabling technologies, applications, and future outlook on intelligent transportation. IEEE Commun. Mag. 2009, 47, 84–95.
- Rakesh, G.; Belwal, M. Vehicle collision avoidance in a vanet environment by data communication. In Proceedings of the 2019 3rd International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 27–29 March 2019; pp. 238–242.
- Zheng, D.; Jing, C.; Guo, R.; Gao, S.; Wang, L. A traceable blockchain-based access authentication system with privacy preservation in VANETs. IEEE Access 2019, 7, 117716–117726.
- Grover, J. Security of Vehicular Ad Hoc Networks using blockchain: A comprehensive review. Veh. Commun. 2022, 34, 100458.
- Xue, K.; Ma, C.; Hong, P.; Ding, R. A temporal-credential-based mutual authentication and key agreement scheme for wireless sensor networks. J. Netw. Comput. Appl. 2013, 36, 316–323.

