Vehicle-to-Vehicle (V2V) networks, specifically Vehicular Ad Hoc Networks (VANETs), are central to enhancing road safety by improving vehicle visibility, particularly when traditional onboard sensors fall short. The crucial role that VANETs play in modern transportation systems is increasingly being recognized, with the ability to facilitate real-time communication between vehicles, improving situational awareness, and thereby enhancing road safety. However, the accuracy, integrity and security of these data are of paramount importance, as any inaccuracies or compromises could lead to incorrect hazard perception and possibly catastrophic consequences. Hence, substantial effort is required to maintain these data characteristics while enabling efficient and rapid data exchange.
- VANET
- security
1. Introduction
2. Obstacle Detection and Mapping in Vehicle-to-Vehicle Networks
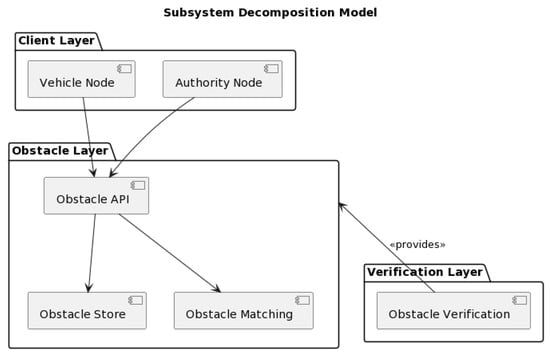
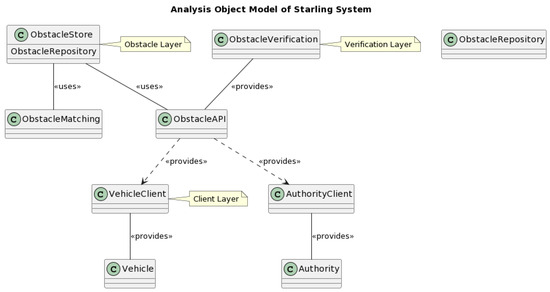
Vehicle-to-Vehicle (V2V) networks, specifically Vehicular Ad Hoc Networks (VANETs), are central to enhancing road safety by improving vehicle visibility, particularly when traditional onboard sensors fall short [4][5][8,9]. The crucial role that VANETs play in modern transportation systems is increasingly being recognized, with the ability to facilitate real-time communication between vehicles, improving situational awareness, and thereby enhancing road safety [6][10]. These networks are fundamentally built upon the exchange of obstacle map data, providing valuable information about potential road hazards, enabling advanced warning systems, and fostering overall safer driving conditions. However, the accuracy, integrity and security of these data are of paramount importance, as any inaccuracies or compromises could lead to incorrect hazard perception and possibly catastrophic consequences [7][8][4,11]. Hence, substantial effort is required to maintain these data characteristics while enabling efficient and rapid data exchange [9][12]. The investigation of obstacle detection for vehicles has a rich history, dating back to the 1980s and 1990s, before the advent of autonomous driving technology [10][11][13,14]. Initial techniques focused primarily on obstacle detection to avoid collisions, often neglecting the crucial aspect of data exchange between vehicles. However, technological advances have reshaped this domain. High-resolution cameras and sophisticated sensors such as LIDAR have elevated detection methods, considerably enhancing their reliability and accuracy [12][13][15,16]. Consequently, evolved detection methods provide a more comprehensive understanding of the driving environment, contributing significantly to reducing collision incidents [1]. Despite these advances, challenges remain to secure an efficient exchange of obstacle data, which is crucial for the comprehensive functionality of V2V networks. Thus, blockchain technology, known for its security and the decentralization advantages, has seen its application in the V2V communication space. But, still, its potential to enable coordinated obstacle mapping, a significant aspect of VANETs, is often neglected [14][15][17,18]. Nevertheless, blockchain has been successfully employed in other VANET subsystems mostly as enabling technology for secure data transmissions or key exchange. Expanding on exciting and innovative research in blockchain-enabled V2V communication systems, several researchers have presented promising methods and architectures to enhance security and efficiency within VANETs. Shrestha et al. [16][5] introduced a novel blockchain system that ensures secure message exchange within VANET. The system utilizes blockchain’s immutability and transparency features to validate the authenticity of transmitted messages, thereby improving the trustworthiness of VANET communications. Furthermore, Ma et al. [17][6] proposed a decentralized key management mechanism that provides robust security in VANET. Leveraging the blockchain’s decentralized nature, the authors built a system that eliminates single points of failure, thereby enhancing the robustness and reliability of key management in VANET. Additionally, Luo et al. [18][19] present a blockchain-enabled trust-based location privacy protection scheme in VANET. This scheme uses blockchain to create a decentralized, trust-based model that protects user privacy while ensuring secure V2V communication. But none of these solutions is designed to protect obstacle information or ensure efficiency or scalability. Only a very few authors have reported blockchain-enabled secure obstacle mapping solutions in VANETs. The Starling system [19][7] is probably the most promising and popular. Starling is an innovative solution designed to improve road safety. This system leverages the strengths of blockchain technology, offering secure storage and retrieval of road obstacle data [20]. The system design aims to minimize the traditional problems associated with obstacle data exchange [21], paving the way for safer and more efficient V2V communications. The proposed Starling system is built on an open-layered architecture that encompasses six autonomous subsystems in three hierarchical layers (see Figure 1). This layout provides a structured and efficient network for communication, making the system capable of handling complex V2V communications with ease [22].