 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Mohammad Zamani Khaneghah | -- | 2804 | 2023-07-20 02:25:30 | | | |
| 2 | Fanny Huang | Meta information modification | 2804 | 2023-07-21 08:03:01 | | |
Video Upload Options
Fault detection and diagnosis (FDD) is of utmost importance in ensuring the safety and reliability of electric vehicles (EVs). The EV’s power train and energy storage, namely the electric motor drive and battery system, are critical components that are susceptible to different types of faults. Failure to detect and address these faults in a timely manner can lead to EV malfunctions and potentially catastrophic accidents. In the realm of EV applications, Permanent Magnet Synchronous Motors (PMSMs) and lithium-ion battery packs have garnered significant attention.
1. Introduction
2. Electric Motor Drive Faults
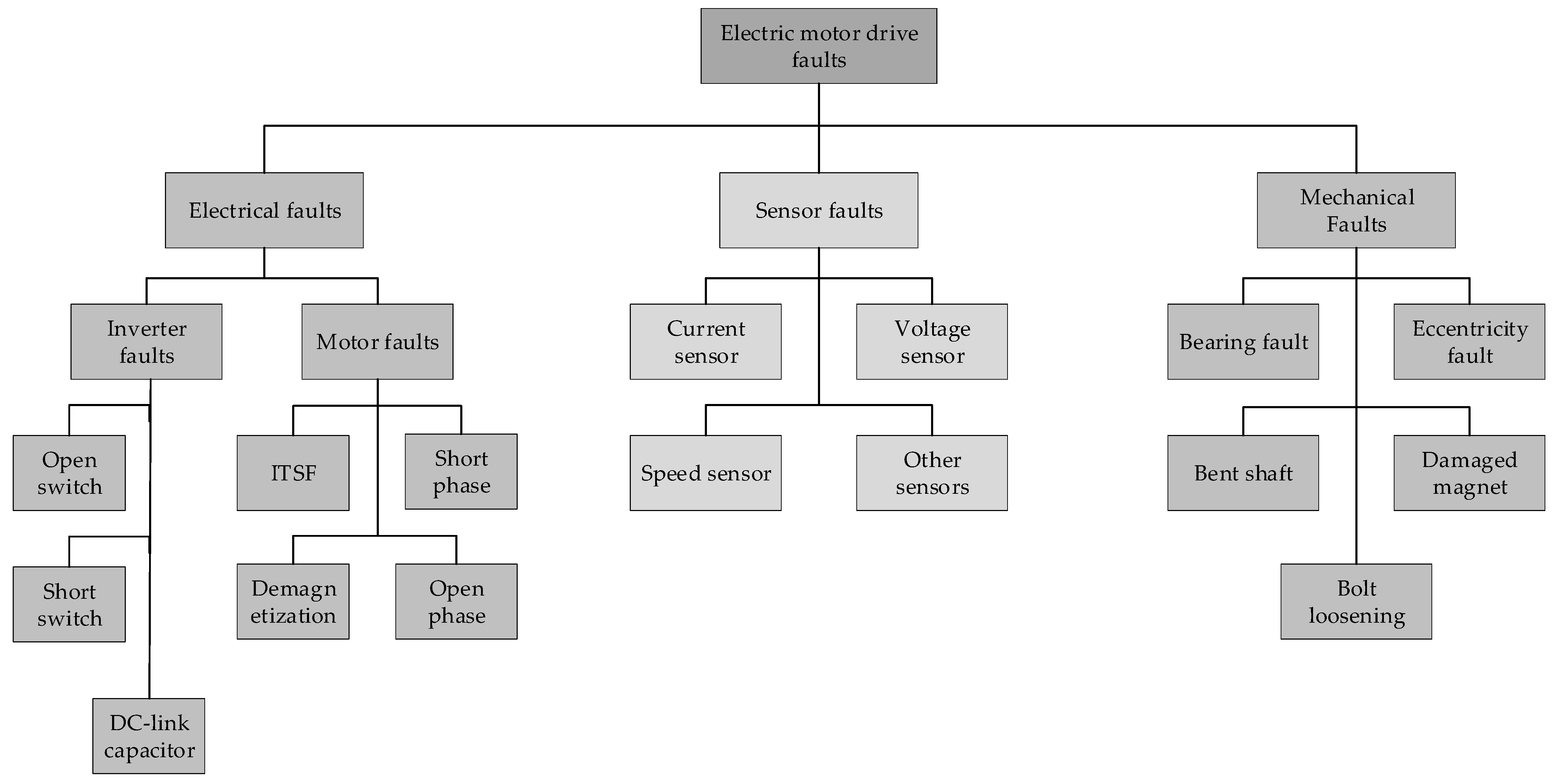
2.1. Electrical Faults
2.1.1. Interturn Short-Circuit Fault
2.1.2. Demagnetization Fault
2.1.3. Open or Short Switches in the Inverter
2.2. Mechanical Faults
2.2.1. Bearing Faults
2.2.2. Air–Gap Eccentricity Faults
2.3. Sensor Faults
2.3.1. Current Sensor Faults
2.3.2. Voltage Sensor Faults
2.3.3. Speed or Position Sensor Faults
3. Battery System Faults
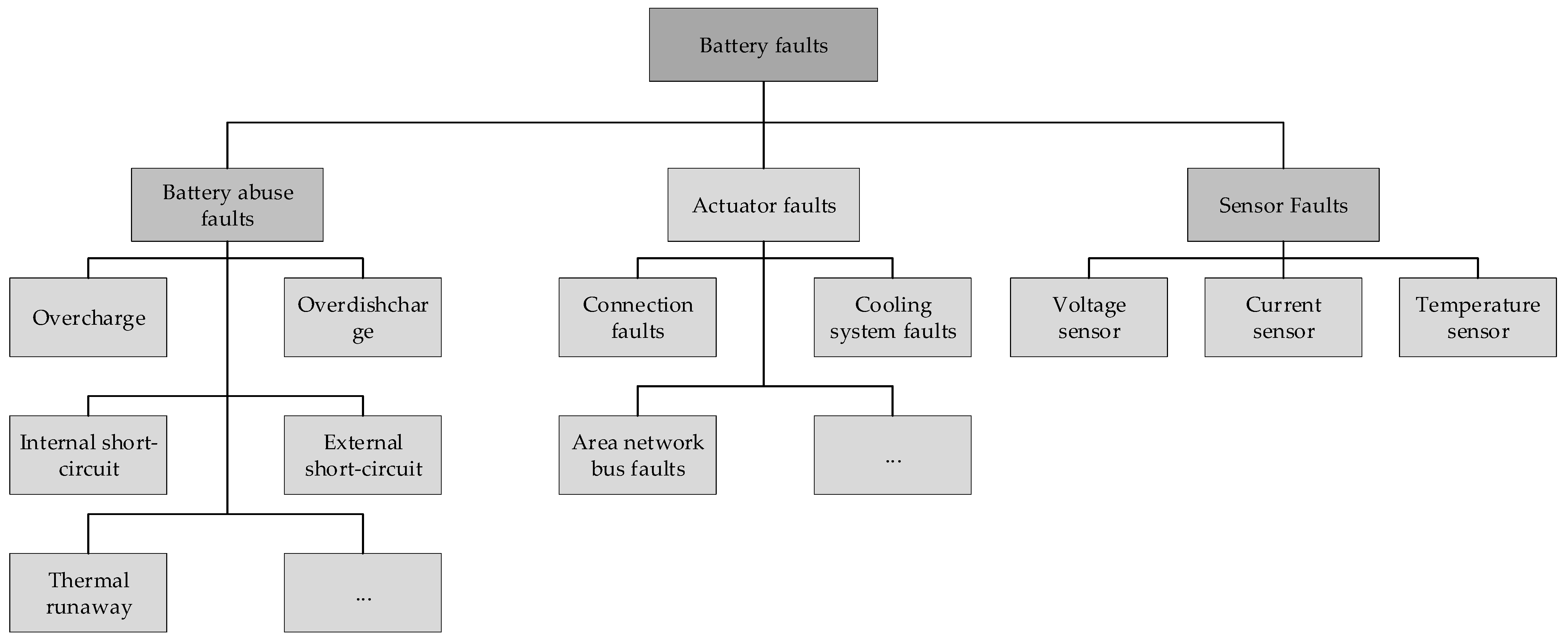
Figure 2. Various battery faults.
3.1. Battery abuse faults
This group of faults contains overcharge, over-discharge, internal short circuits, external short circuit, thermal runaway, etc. which can happen inside the battery. Errors in the battery management system and cell capacity degradation can result in overcharge and over-discharge faults. These faults can lead to chemical and physical damage to the battery, degrading the battery performance and safe operation [36]. The internal short circuit refers to the insulation failure between the layers inside the battery, while the external one notices the shorted positive and negative terminals [37]. An external short circuit is more dangerous and noticeable fault than an internal short circuit, which is negligible in the early stages. However, the internal short circuit can turn into an intense fault after a while [38]. Rapid voltage drop and thermal runaway are expected when a short circuit occurs.
3.2. Actuator Faults
Connection faults, cooling system faults, controller area network bus faults, etc. belong to this group of faults. Due to the need for a high level of energy in EV applications, the battery system usually consists of many battery cells connected in a parallel-series configuration. Due to the working environment of EV, temperature changes, vibration and aging, the connections can become defective. Loose connections can reduce the available power, resulting in potential accidents. Increasing the the resistance of the connection can cause heat production and affect the battery performance [39]. If the cooling system fails, the battery temperature may exceed the allowed temperature range and even lead to thermal runaway, so it is on of the considerable battery faults.
3.3. Sensor Faults
Battery management system (BMS) plays a crucial role in the safe, reliable and effective performance of EVs. This unit is responsible for several tasks, including estimating the state of charge (SOC) and state of health (SOH) of the battery, thermal management, cell balancing, etc., by monitoring the voltage, current and temperature of the cells [40]. In this regard, many current, voltage and temperature sensors are utilized in the battery system. Any defect and fault in these sensor can be reflected in the BMS performance and lead to further faults such as battery abuse faults and significant failures, all of which reduce the battery lifespan and safety.
References
- Popescu, M.; Goss, J.; Staton, D.A.; Hawkins, D.; Chong, Y.C.; Boglietti, A. Electrical Vehicles—Practical Solutions for Power Traction Motor Systems. IEEE Trans. Ind. Appl. 2018, 54, 2751–2762.
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive Diagnosis and Tolerance Strategies for Electrical Faults and Sensor Faults in Dual Three-Phase PMSM Drives. IEEE Trans. Power Electron. 2019, 34, 6669–6684.
- Zhang, L.; Zhu, C.; Yu, S.; Ge, D.; Zhou, H. Status and challenges facing representative anode materials for rechargeable lithium batteries. J. Energy Chem. 2022, 66, 260–294.
- Shete, S.; Jog, P.; Kamalakannan, R.; Raghesh, J.T.A.; Manikandan, S.; Kumawat, R.K. Fault Diagnosis of Electric Vehicle’s Battery by Deploying Neural Network. In Proceedings of the 6th International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud), I-SMAC, Dharan, Nepal, 10–12 November 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 346–351.
- Lang, W.; Hu, Y.; Gong, C.; Zhang, X.; Xu, H.; Deng, J. Artificial Intelligence-Based Technique for Fault Detection and Diagnosis of EV Motors: A Review. IEEE Trans. Transp. Electrif. 2022, 8, 384–406.
- Bhuiyan, E.A.; Akhand, M.A.; Das, S.K.; Ali, F.; Tasneem, Z.; Islam, R.; Saha, D.K.; Badal, F.R.; Ahamed, H.; Moyeen, S.I. A Survey on Fault Diagnosis and Fault Tolerant Methodologies for Permanent Magnet Synchronous Machines. Int. J. Autom. Comput. 2020, 17, 763–787.
- Niu, X.; Zhu, L.; Ding, H. New statistical moments for the detection of defects in rolling element bearings. Int. J. Adv. Manuf. Technol. 2005, 26, 1268–1274.
- Moosavi, S.; Djerdir, A.; Ait-Amirat, Y.; Khaburi, D. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82.
- Nandi, S. Detection of stator faults in induction machines using residual saturation harmonics. IEEE Trans. Ind. Appl. 2006, 42, 1201–1208.
- Bonnett, A.; Soukup, G. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937.
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. Diagnosis of interturn faults in pmsms operating under nonstationary conditions by applying order tracking filtering. IEEE Trans. Power Electron. 2013, 28, 507–515.
- Kim, K.-H.; Choi, D.-U.; Gu, B.-G.; Jung, I.-S. Fault model and performance evaluation of an inverter-fed permanent magnet synchronous motor under winding shorted turn and inverter switch open. IET Electr. Power Appl. 2010, 4, 214–225.
- Kim, K.-T.; Park, J.-K.; Kim, B.-W.; Hur, J. Comparison of the fault characteristics of IPM-type and SPM-type BLDC motors under Inter-Turn Faults conditions using Winding Function Theory. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition, ECCE, Raleigh, NC, USA, 15–20 September 2012; pp. 1262–1269.
- Lee, Y.-S.; Kim, K.-T.; Hur, J. Finite-element analysis of the demagnetization of IPM-type BLDC motor with stator turn fault. IEEE Trans. Magn. 2014, 50, 889–892.
- Qi, Y.; Bostanci, E.; Gurusamy, V.; Akin, B. A Comprehensive Analysis of Short-Circuit Current Behavior in PMSM Interturn Short-Circuit Faults. IEEE Trans. Power Electron. 2018, 33, 10784–10793.
- Lee, H.; Jeong, H.; Kim, S.W. Detection of Interturn Short-Circuit Fault and Demagnetization Fault in IPMSM by 1-D Convolutional Neural Network. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019.
- Hong, J.; Park, S.; Hyun, D.; Kang, T.-J.; Bin Lee, S.; Kral, C.; Haumer, A. Detection and Classification of Rotor Demagnetization and Eccentricity Faults for PM Synchronous Motors. IEEE Trans. Ind. Appl. 2012, 48, 923–932.
- Kim, K.-C.; Lim, S.-B.; Koo, D.-H.; Lee, J. The Shape Design of Permanent Magnet for Permanent Magnet Synchronous Motor Considering Partial Demagnetization. IEEE Trans. Magn. 2006, 42, 3485–3487.
- Ruoho, S.; Kolehmainen, J.; Ikaheimo, J.; Arkkio, A. Interdependence of demagnetization, loading, and temperature rise in a permanent-magnet synchronous motor. IEEE Trans. Magn. 2010, 46, 949–953.
- Espinosa, A.G.; Rosero, J.A.; Cusido, J.; Romeral, L.; Ortega, J.A. Fault detection by means of Hilbert-Huang transform of the stator current in a PMSM with demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318.
- Joo, D.; Cho, J.-H.; Woo, K.; Kim, B.-T.; Kim, D.-K. Electromagnetic field and thermal linked analysis of interior permanent-magnet synchronous motor for agricultural electric vehicle. IEEE Trans. Magn. 2011, 47, 4242–4245.
- Faiz, J.; Nejadi-Koti, H. Demagnetization Fault Indexes in Permanent Magnet Synchronous Motors—An Overview. IEEE Trans. Magn. 2016, 52, 8201511.
- Yang, Z.; Shi, X.; Krishnamurthy, M. Vibration monitoring of PM synchronous machine with partial demagnetization and inter-turn short circuit faults. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo: Components, Systems, and Power Electronics—From Technology to Business and Public Policy, ITEC, Beijing, China, 31 August–3 September 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014.
- Zhang, Z.; Luo, G.; Zhang, Z.; Tao, X. A hybrid diagnosis method for inverter open-circuit faults in PMSM drives. CES Trans. Electr. Mach. Syst. 2020, 4, 180–189.
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A Data-Driven Fault Diagnosis Methodology in Three-Phase Inverters for PMSM Drive Systems. IEEE Trans. Power Electron. 2017, 32, 5590–5600.
- Gan, C.; Chen, Y.; Qu, R.; Yu, Z.; Kong, W.; Hu, Y. An Overview of Fault-Diagnosis and Fault-Tolerance Techniques for Switched Reluctance Machine Systems. IEEE Access 2019, 7, 174822–174838.
- Siddiqui, K.M.; Bakhsh, F.I.; Ahmad, R.; Solanki, V. Advanced Signal Processing Based Condition Monitoring of PMSM for Stator-inter Turn Fault. In Proceedings of the 2021 IEEE 8th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering, UPCON, Dehradun, India, 11–13 November 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021.
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729.
- Ewert, P.; Orlowska-Kowalska, T.; Jankowska, K. Effectiveness analysis of pmsm motor rolling bearing fault detectors based on vibration analysis and shallow neural networks. Energies 2021, 14, 712.
- Guo, Z.; Yang, M.; Huang, X. Bearing fault diagnosis based on speed signal and CNN model. Energy Rep. 2022, 8, 904–913.
- Park, Y.; Fernandez, D.; Bin Lee, S.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Reigosa, D.D.; Briz, F. Online Detection of Rotor Eccentricity and Demagnetization Faults in PMSMs Based on Hall-Effect Field Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509.
- Choi, K.; Kim, Y.; Kim, S.-K.; Kim, K.-S. Current and Position Sensor Fault Diagnosis Algorithm for PMSM Drives Based on Robust State Observer. IEEE Trans. Ind. Electron. 2021, 68, 5227–5236.
- Xia, J.; Guo, Y.; Dai, B.; Zhang, X. Sensor Fault Diagnosis and System Reconfiguration Approach for an Electric Traction PWM Rectifier Based on Sliding Mode Observer. IEEE Trans. Ind. Appl. 2017, 53, 4768–4778.
- El Khil, S.K.; Jlassi, I.; Estima, J.; Mrabet-Bellaaj, N.; Cardoso, A.M. Current sensor fault detection and isolation method for PMSM drives, using average normalised currents. Electron. Lett. 2016, 52, 1434–1436.
- Kang, Y.; Duan, B.; Zhou, Z.; Shang, Y.; Zhang, C. Online multi-fault detection and diagnosis for battery packs in electric vehicles. Appl. Energy 2020, 259, 114170.
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery management system hardware concepts: An overview. Appl. Sci. 2018, 8, 534.
- Rheinfeld, A.; Sturm, J.; Frank, A.; Kosch, S.; Erhard, S.V.; Jossen, A. Impact of Cell Size and Format on External Short Circuit Behavior of Lithium-Ion Cells at Varying Cooling Conditions: Modeling and Simulation. J. Electrochem. Soc. 2019, 167, 013511.
- Ouyang, M.; Zhang, M.; Feng, X.; Lu, L.; Li, J.; He, X.; Zheng, Y. Internal short circuit detection for battery pack using equivalent parameter and consistency method. J. Power Source 2015, 294, 272–283.
- Liu, G.; Ouyang, M.; Lu, L.; Li, J.; Han, X. Analysis of the heat generation of lithium-ion battery during charging and discharging considering different influencing factors. J. Therm. Anal. Calorim. 2014, 116, 1001–1010.
- Samanta, A.; Chowdhuri, S.; Williamson, S.S. Machine Learning-Based Data-Driven Fault Detection/Diagnosis of Lithium-Ion Battery: A Critical Review. Electronics 2021, 10, 1309.
- Samanta, A.; Chowdhuri, S.; Williamson, S.S. Machine Learning-Based Data-Driven Fault Detection/Diagnosis of Lithium-Ion Battery: A Critical Review. Electronics 2021, 10, 1309.

