Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Shuaicai Li | -- | 2274 | 2023-06-27 04:23:08 | | | |
| 2 | Lindsay Dong | + 14 word(s) | 2288 | 2023-06-28 11:01:36 | | | | |
| 3 | Lindsay Dong | Meta information modification | 2288 | 2023-06-28 11:03:11 | | | | |
| 4 | Lindsay Dong | Meta information modification | 2288 | 2023-06-30 07:21:58 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Li, S.; Yang, X.; Lin, X.; Zhang, Y.; Wu, J. Real-Time Vehicle Detection Based on YOLOv5. Encyclopedia. Available online: https://encyclopedia.pub/entry/46086 (accessed on 25 July 2026).
Li S, Yang X, Lin X, Zhang Y, Wu J. Real-Time Vehicle Detection Based on YOLOv5. Encyclopedia. Available at: https://encyclopedia.pub/entry/46086. Accessed July 25, 2026.
Li, Shuaicai, Xiaodong Yang, Xiaoxia Lin, Yanyi Zhang, Jiahui Wu. "Real-Time Vehicle Detection Based on YOLOv5" Encyclopedia, https://encyclopedia.pub/entry/46086 (accessed July 25, 2026).
Li, S., Yang, X., Lin, X., Zhang, Y., & Wu, J. (2023, June 27). Real-Time Vehicle Detection Based on YOLOv5. In Encyclopedia. https://encyclopedia.pub/entry/46086
Li, Shuaicai, et al. "Real-Time Vehicle Detection Based on YOLOv5." Encyclopedia. Web. 27 June, 2023.
Copy Citation
An improved YOLOv5 model is used to detect vehicles in aerial images, which effectively enhances the detection performance of tiny objects and obscured vehicles.
vehicle detection
UAV imagery
YOLOv5
Feature Fusion Network
Soft-NMS
1. Introduction
The usage of small, low-altitude UAVs has snowballed in recent years [1][2][3][4]. Objection detection techniques based on UAVs equipped with vision sensors have attracted much interest in areas such as unmanned vehicles and intelligent transportation systems [5][6][7][8]. UAV-based aerial vehicle detection techniques are less expensive than cameras installed at fixed locations and produce more extensive image views, greater flexibility, and broader coverage. UAVs can monitor road traffic over any range and provide critical information for subsequent intelligent traffic supervision tasks such as traffic flow calculation, unexpected accident detection, and traffic situational awareness. However, the vast percentage of vehicle targets have few feature points and small sizes [9][10], which presents a difficulty for precise and real-time vehicle detection in the UAV overhead view [11].
Existing vehicle detection approaches can be roughly divided into traditional and deep learning-based vehicle detection algorithms. Traditional vehicle detection algorithms must extract features [12][13] manually and then use SVM (Support Vector Machine), AdaBoost, and other machine learning methods for classification. However, this way is time-consuming and can only extract shallow features, which has significant limitations when applied to aerial photography scenes with small targets. In recent years, with the continuous development of deep learning techniques, various artificial intelligence algorithms based on convolutional neural networks have played a great role in different fields, such as autonomous driving [14], optimization of medicine policies [15], and wildlife census [16]. Deep learning-based target detection algorithms have also been extensively applied, mainly including two-stage and single-stage algorithms. Two-stage target detection algorithms need to extract candidate regions first and then perform regression localization and classification of targets, with common examples including: Fast R-CNN [17], Faster R-CNN [18], and R-FCN [19]. Singh et al. [20] used Fast R-CNN-optimized samples to design a real-time intelligent framework that performs well on vehicle detection tasks with complex backgrounds and many small targets. Nevertheless, the model may not fit well for cases where the objective sizes vary widely. The authors of [21] conducted a study on vehicle detection based on Faster R-CNN, and the improved model reduced the latency and enhanced the detection performance for small targets. However, the model requires high computational resources in the detection process. Kong et al. [22] use a parallel RPN network combined with a density-based sample assigner to improve the detection of vehicle-dense areas in aerial images. However, the model structure is complex and requires two stages to complete the detection, which cannot meet the requirement of real-time detection. Since the two-stage detection algorithm requires the pre-generation of many pre-selected boxes, it is highly accurate but slow and cannot meet the needs of real-time detection [23]. The single-stage target detection algorithm directly transforms the localization and classification problem into a regression problem, which has an absolute speed advantage and accuracy potential compared with the two-stage one. The mainstream single-stage target detection algorithms mainly include the YOLO (You Only Look Once) series [24][25][26][27] and the SSD series [28]. Yin et al. [29] obtained outstanding detection performance for small objects by improving the efficiency of SSD in using feature information at different scales. However, the default box needs to be selected manually, which may affect the performance of the model in detecting small targets. Lin et al. [30] detect oriented vehicles in aerial images based on YOLOv4, and the improved model significantly improved the detection performance in scenarios with densely arranged vehicles and buildings. However, further improvement studies are lacking for scenes with small targets. Adel et al. [31] compared the detection performance of Faster R-CNN, YOLOv3, and YOLOv4 on the UAV aerial vehicle dataset but without considering the impact of vehicle occlusion, shooting angle, and lighting conditions on the model. Zhang et al. [32] propose a novel multi-scale adversarial network for improved vehicle detection in UAV imagery. The model performs great in images from different perspectives, heights, and imaging situations. However, the classification of vehicles is not specific enough, with only two categories: large vehicles and small vehicles.
Because of its excellent detection accuracy and quick inference, YOLOv5 [33] is applied extensively in various fields for practical applications. Niu et al. [34] used the ZrroDCE low-light enhancement algorithm to optimize the dataset and combined it with YOLOv5 and AlexNet for traffic light detection. Sun et al. [35] employed YOLOv5 to identify the marks added to bolts and nuts, from which the relative rotation angle was calculated to determine whether the bolts were loose. Yan et al. [36] applied an enhanced model based on YOLOv5 to apple detection, which improved the detection speed and reduced the false detection rate of obscured targets.
2. Real-Time Vehicle Detection Based on YOLOv5
2.1. Overview of YOLOv5
YOLOv5 is a single-stage target detection algorithm released by Ultralytics in 2020 that consists of four structures: YOLOv5s, YOLOv51, YOLOv5m, and YOLOv5x. The model works by dividing the image into multiple grids, and if the center of the target falls within a grid, that grid is responsible for predicting the object. YOLOv5s is the most miniature model in depth and width among these four models. With the increase in model size, although the detection accuracy improves, the detection speed also becomes slower. As shown in Figure 1, YOLOv5s network is mainly categorized into four parts: input layer(input), backbone, neck, and prediction layer (head).
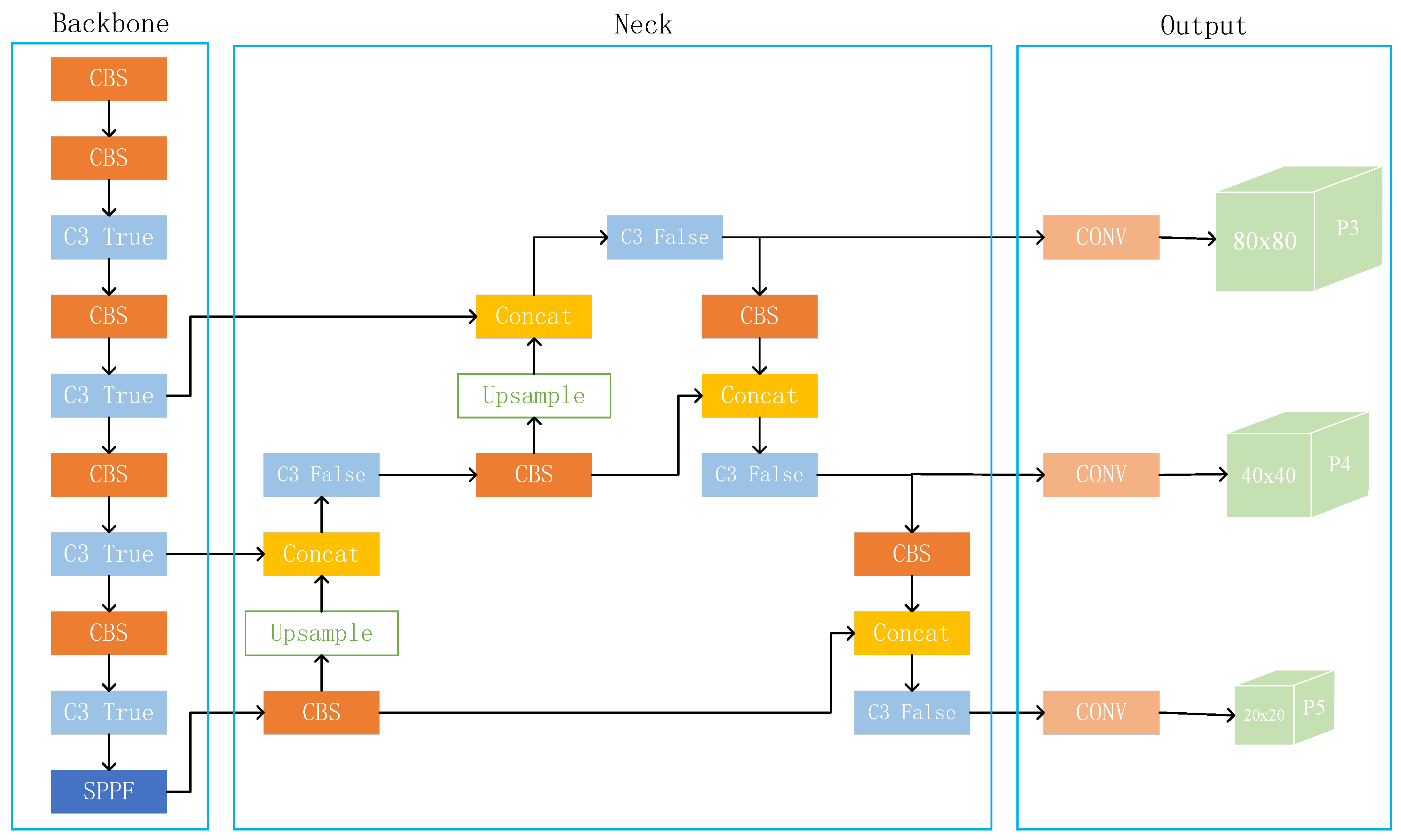
Figure 1. The framework of the YOLOv5s algorithm.
The primary function of the input layer is to unify the size of the input image into a fixed size. The backbone section, which includes the CBS, C3, and SPPF modules, is primarily responsible for extracting essential information from the input picture. The structure of each module is shown in Figure 2. The Neck portion of YOLOv5 employs a mixed structure of FPN [37] and PAN [38]. FPN transfers semantic information from deep to shallow feature maps, while PAN conveys localization information from shallow to deep feature layers. The combination of the two may aggregate characteristics from multiple backbone levels to different detection layers, enhancing the feature fusion capacity of the network.
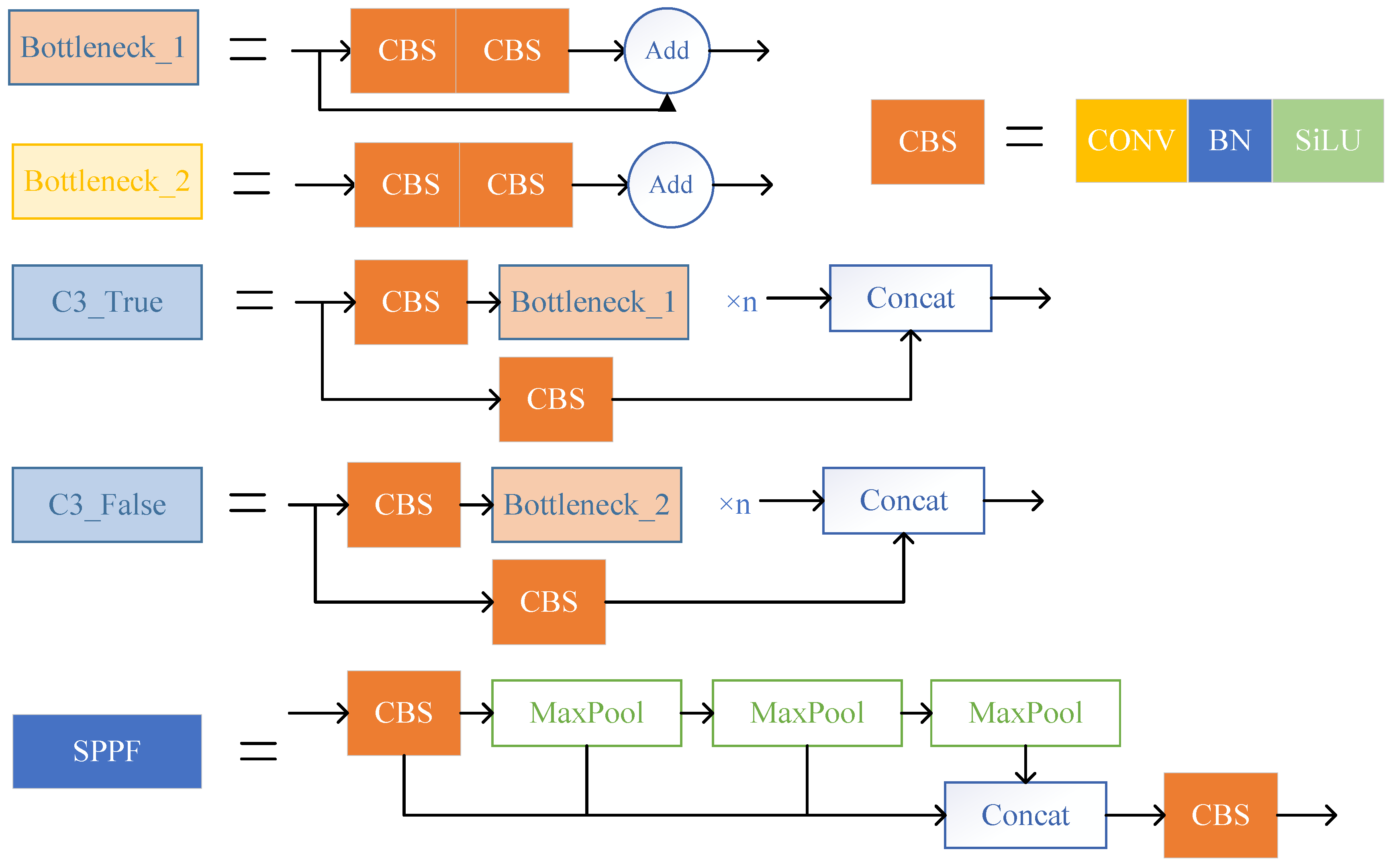
Figure 2. Structure diagram of CBS, C3, and SPPF modules.
2.2. Adding a Prediction Layer for Tiny Objects
The maximum downsampling step of the YOLOv5s network is 32. Therefore, a resolution less than 32 × 32 pixels is regarded as a small target [39], greater than 96 × 96 pixels is defined as a large target, and in between is classified as a medium target. Since there are a large number of targets with tiny scales in the pictures taken by UAVs, scholars further subdivide the targets with a resolution less than 32 × 32 pixels into two cases of tiny (resolution < 16 × l6 pixels) and small (16 × 16 pixels < resolution < 32 × 32 pixels). The obtained target scale distribution is shown in Figure 3. It can be found that the number of tiny objects in train, val, and test are all significant. Therefore, it is essential to customize a detection layer more suitable for detecting tiny targets.
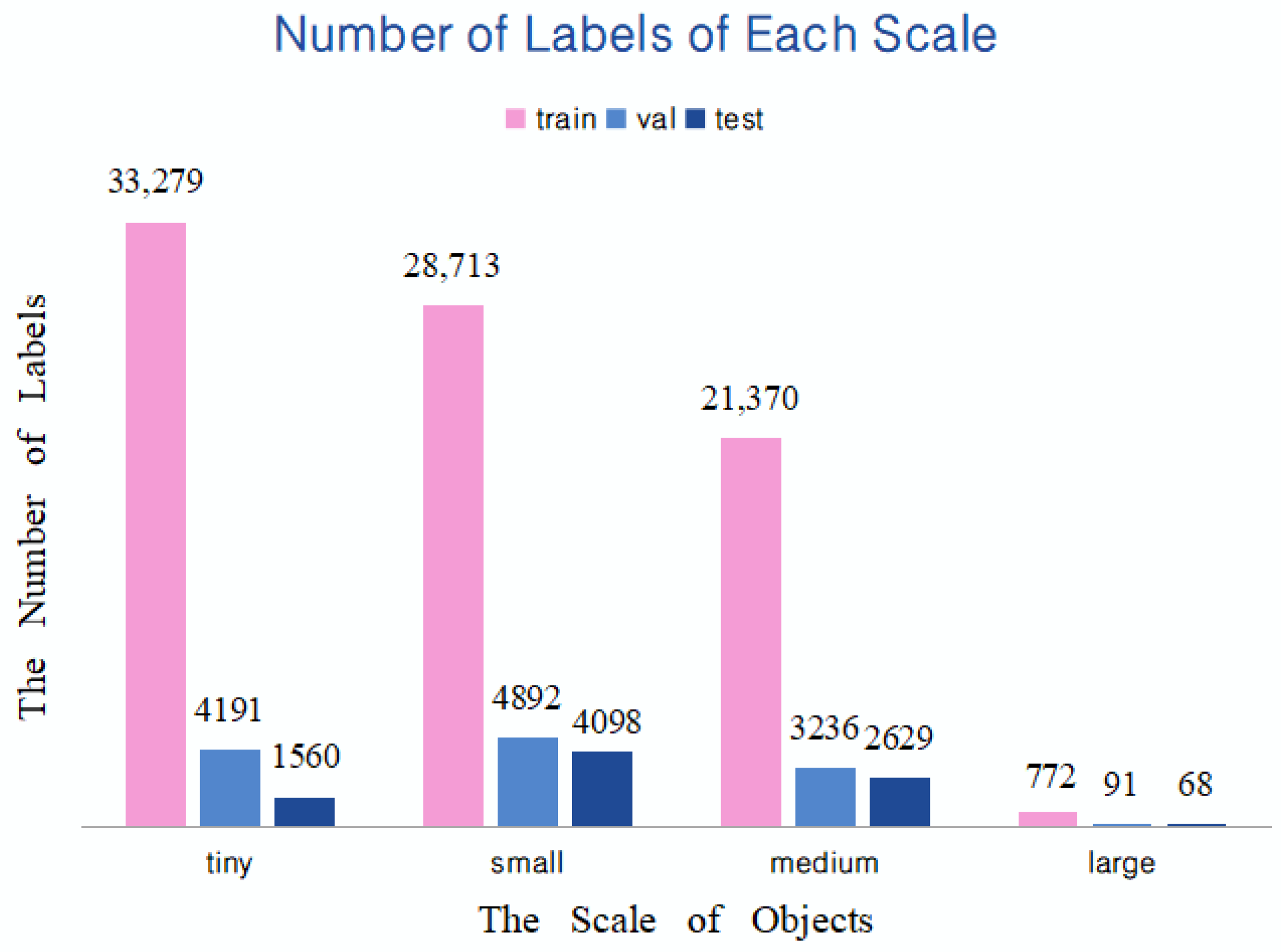
Figure 3. Number of objects at different scales in this dataset.
The YOLOv5s network has three detection layers, P3, P4, and P5, with feature map sizes of 80 × 80, 40 × 40, and 20 × 20, respectively. The larger size of the feature map is responsible for detecting smaller objects. The largest 80 × 80 feature map corresponds to an input size of 640 × 640, and the receptive field size of a grid in the feature map is 8 × 8. If the height or width of a tiny vehicle in the original image is less than 8 pixels, it is difficult for the network to learn the features of the object. The new P2 detection branch can detect targets at the 4 × 4 pixel level while configuring anchor boxes of smaller size, thus effectively reducing the missed detection of tiny vehicles.
From Figure 4, it can see that the first C3 module in the Backbone outputs a feature map of 160 × 160 after two downsamplings, while the second C3 module produces a size of 80 × 80. The scholars fuse the feature map of 160 × 160 with the output of the second C3 module after upsampling to obtain the detection branch P2. In this way, the input of P2 derives mainly from the shallow convolutional layer and contains more information related to shape, position, and size. This information facilitates the model to discriminate fine-grained features more accurately, thus improving the capability to detect small targets.
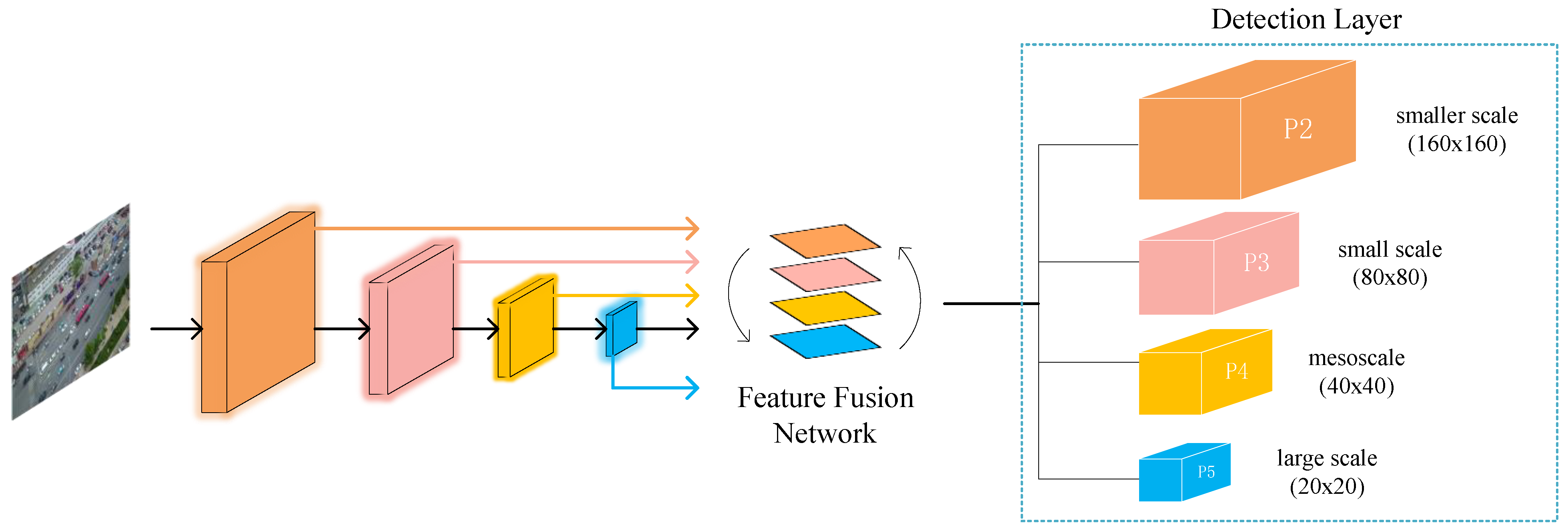
Figure 4. YOLOv5s algorithm framework with the added tiny object detection layer.
2.3. Enhancing Feature Fusion with Bifpn
The Neck part of YOLOv5 uses a combined FPN and PAN structure. When it comes to feature extraction, the shallow network has a higher resolution and more precise position information. On the other hand, the deeper network has a more extensive receptive field and more high-dimensional semantic information that aids with object categorization. FPN facilitates semantic information from deep feature maps to shallow feature maps, while PAN accomplishes a high degree of integration between shallow localization information and deep semantic information. The combination of FPN and PAN, which aggregates parameters from multiple backbone levels to distinct detection layers, significantly improves the feature fusion capabilities of the network.
Nevertheless, there is a problem in that input to the PAN structure is largely feature information processed by FPN, with no original feature information taken from the backbone network. This issue may cause the optimization direction of the model to be biased, affecting the detection impact. The BiFPN first simplifies the PAN structure by removing the nodes with only one input and output edge. Then, an extra edge is added between two nodes at the same level to fuse more differentiated features, and the structure is shown in Figure 5C. The original BiFPN would assign various weights to different input features according to their importance, and this structure is utilized frequently to encourage feature fusion. The introduction of BiFPN with weights, however, increases the number of parameters and calculations for the dataset in this research, and the detection effect is not satisfactory.
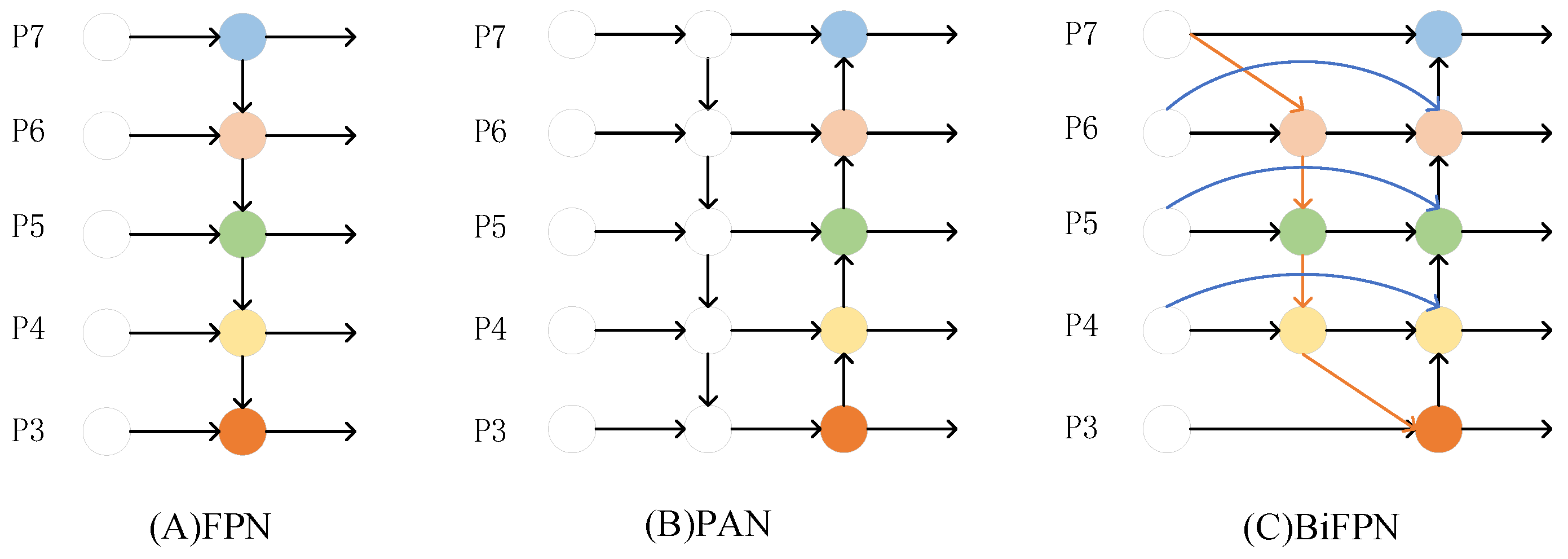
Figure 5. Schematic diagram of different feature fusion structures.
Because the motivation for introducing BiFPN is that PAN can obtain more original feature information as input, scholars remove the weighted part and only reference its cross-scale connection way. By introducing the de-weighted BiFPN, the trade-off between accuracy and efficiency is considered, making the feature fusion process more reasonable and efficient. In this way, each node of PAN has one input edge from the backbone network, making the training process have continuous involvement of the original features and preventing the model from deviating from the expectation during the training process. The feature information of tiny targets is already relatively insufficient, and the features are easily missing after several convolutions. As shown in Figure 6, part of the input of the added prediction layer is from the first C3 module. This module retains most of the original feature information. Thus, more features about the tiny objects can be obtained, and the detection performance of the model can be improved.
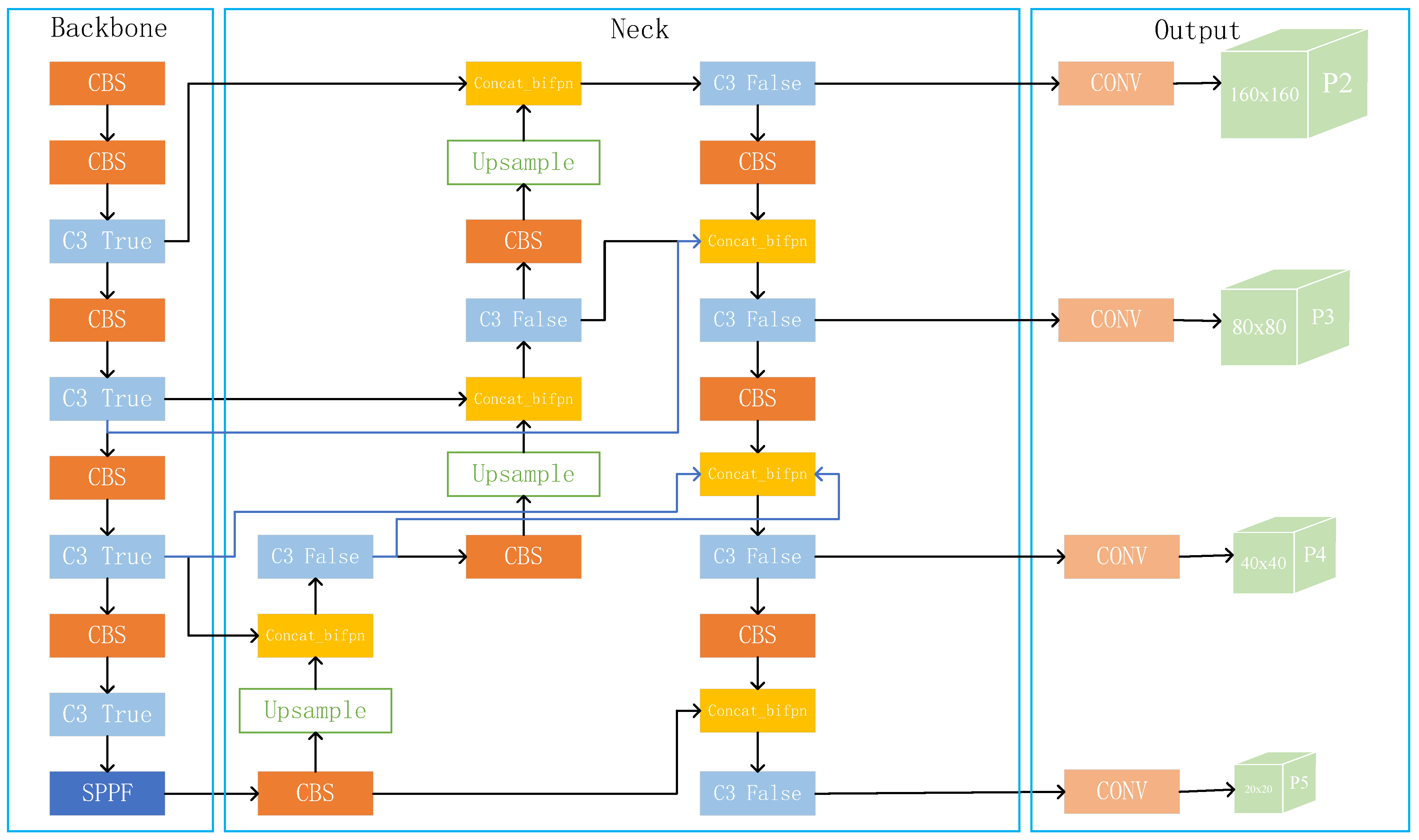
Figure 6. Network structure diagram after improving Neck and Head parts.
2.4. Introducing Soft-NMS to Decrease Missed Detections
The NMS algorithm selects the one with the highest confidence among all the predictor frames then conducts IoU operations sequentially with other predictor frames. For a prediction box whose IoU value exceeds the set threshold, it is directly deleted. During peak commuting hours, the vehicle density in the images captured by the UAV is high and closely aligned. In this circumstance, using the NMS algorithm suppresses many anchor frames that initially belonged to different targets, resulting in the missed detection of obscured vehicles.The NMS algorithm is shown in Equation (1).
where and denote the ith predictor box and its score, respectively, and is the set threshold. M indicates the candidate box with the highest score. When the IoU of M and is greater than the threshold, the score of b is directly set to 0, likely to erroneously remove some prediction boxes containing vehicles.
Unlike the NMS method, Soft-NMS selects M as the benchmark box then calculates the IoU between M and the neighboring predictor boxes. This adjacent prediction frame is not suppressed when the IoU value is less than the set threshold. When the IoU value is greater than the set threshold, the penalty function attenuates the scores of the prediction frames that overlap with the reference frame instead of directly setting the scores to 0. By penalizing the scores of prediction frames with large IoU values, anchor frames with larger overlap areas get higher penalty coefficients and more minor scores 𝑠𝑖. Thus, there is a chance they are preserved during the suppression iterations, avoiding the situation where highly overlapping prediction frames contain targets but are removed.
The expression of the Soft-NMS algorithm is given in Equation (2).
where is the hyperparameter of the penalty function. Combining with Equation (2), it can be seen that when the overlap of two boxes is higher, the value of is larger and is smaller. So the predicted box obtains a smaller score but can be retained instead of directly deleted, thus avoiding the missed detection of overlapping vehicles.
Figure 7a compares the detection performance of YOLOv5 using NMS and Soft-NMS as prediction frame screening algorithms. By focusing on the red dashed box in Figure 7b, it can be found that the application of the Soft-NMS algorithm successfully decreases the number of missed vehicles in the densely arranged region and enhances the detection performance of the model in the high-overlap scenario.

Figure 7. Comparison of YOLOv5s algorithm detection results before and after using Soft-NMS. (a) The detection performance of YOLOv5; (b) The detection performance of YOLOv5 after the introduction of Soft-NMS.
References
- Xiong, J.; Liu, Z.; Chen, S.; Liu, B.; Zheng, Z.; Zhong, Z.; Yang, Z.; Peng, H. Visual detection of green mangoes by an unmanned aerial vehicle in orchards based on a deep learning method. Biosyst. Eng. 2020, 194, 261–272.
- Byun, S.; Shin, I.-K.; Moon, J.; Kang, J.; Choi, S.-I. Road traffic monitoring from UAV images using deep learning networks. Remote Sens. 2021, 13, 4027.
- Peng, X.; Zhong, X.; Zhao, C.; Chen, A.; Zhang, T. A UAV-based machine vision method for bridge crack recognition and width quantification through hybrid feature learning. Constr. Build. Mater. 2021, 299, 123896.
- Jung, H.K.; Choi, G.S. Improved yolov5: Efficient object detection using drone images under various conditions. Appl. Sci. 2022, 12, 7255.
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Vehicle detection from uav imagery with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6047–6067.
- Ali, B.S. Traffic management for drones flying in the city. Int. J. Crit. Infrastruct. Prot. 2019, 26, 100310.
- Srivastava, S.; Narayan, S.; Mittal, S. A survey of deep learning techniques for vehicle detection from uav images. J. Syst. Architect. 2021, 117, 102152.
- Qu, Y.; Jiang, L.; Guo, X. Moving vehicle detection with convolutional networks in UAV videos. In Proceedings of the 2016 2nd International Conference on Control, Automation and Robotics (ICCAR), Hong Kong, China, 28–30 April 2016; pp. 225–229.
- Tang, T.; Zhou, S.; Deng, Z.; Zou, H.; Lei, L. Vehicle Detection in Aerial Images Based on Region Convolutional Neural Networks and Hard Negative Example Mining. Sensors 2017, 17, 336.
- Qu, T.; Zhang, Q.; Sun, S. Vehicle detection from high-resolution aerial images using spatial pyramid pooling-based deep convolutional neural networks. Multimed. Tools. Appl. 2017, 76, 21651–21663.
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-Captured Scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)Workshops, Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788.
- Xu, Y.; Yu, G.; Wang, Y.; Wu, X.; Ma, Y. A Hybrid Vehicle Detection Method Based onViola-Jones and HOG plus SVM from UAV Images. Sensors 2016, 16, 1325.
- Moranduzzo, T.; Melgani, F. Detecting Cars in UAV lmages With a Catalog-Based Approach. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6356–6367.
- Jin, X.; Li, Z.; Yang, H. Pedestrain detection with YOLOv5 in autonomous driving scenario. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–5.
- Tutsoy, O. Pharmacological, Non-Pharmacological Policies and Mutation: An Artificial Intelligence Based Multi-Dimensional Policy Making Algorithm for Controlling the Casualties of the Pandemic Diseases. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 9477–9488.
- Kellenberger, B.; Marcos, D.; Tuia, D. Detecting mammals in UAV images: Best practices to address a substantially imbalanced dataset with deep learning. Remote Sens. Environ. 2018, 216, 139–153.
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision(ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448.
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; pp. 91–99.
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN:Object Detection via Region-based Fully Convolutional Networks. In Proceedings of the Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016.
- Singh, C.H.; Mishra, V.; Jain, K.; Shukla, A.K. FRCNN-Based Reinforcement Learning for Real-Time Vehicle Detection, Tiracking and Geolocation from UAS. Drones 2022, 6, 406.
- Ou, Z.; Wang, Z.; Xiao, F.; Xiong, B.; Zhang, H.; Song, M.; Zheng, Y.; Hui, P. AD-RCNN: Adaptive Dynamic Neural Network for Small Object Detection. IEEE Internet Things J. 2023, 10, 4226–4238.
- Kong, X.; Zhang, Y.; Tu, S.; Xu, C.; Yang, W. Vehicle Detection in High-Resolution Aerial Images with Parallel RPN and Density-Assigner. Remote Sens. 2023, 15, 1659.
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587.
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788.
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525.
- Redmon, J.; Farhadi, A. Yolov3:An incremental improvement. arXiv 2018, arXiv:1804. 02767.
- Bochkovskiy, A.; Wang, C.Y.; Liao, H. YOLOv4:Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934.
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. Lect. Notes Comput. Sci. 2016, 9905, 21–37.
- Yin, Q.; Yang, W.; Ran, M.; Wang, S. FD-SSD: An improved SSD object detection algorithm based on feature fusion and dilated convolution. Signal Process. Image Commun. 2021, 98, 116402.
- Lin, T.; Su, C. Oriented Vehicle Detection in Aerial Images Based on YOLOv4. Sensors 2022, 22, 8394.
- Ammar, A.; Koubaa, A.; Ahmed, M.; Saad, A.; Benjdira, B. Vehicle Detection from Aerial Images Using Deep Learning: A Comparative Study. Electronics 2021, 10, 820.
- Zhang, R.; Newsam, S.; Shao, Z.; Huang, X.; Wang, J.; Li, D. Multi-scale adversarial network for vehicle detection in UAV imagery. ISPRS J. Photogramm. Remote Sens. 2021, 180, 283–295.
- Glenn Jocher YOLOv5. Available online: https://github.com/ultralytics/yolov5 (accessed on 8 November 2022).
- Niu, C.; Li, K. Traffic Light Detection and Recognition Method Based on YOLOv5s and AlexNet. Appl. Sci. 2022, 12, 10808.
- Sun, Y.; Li, M.; Dong, R.; Chen, W.; Jiang, D. Vision-Based Detection of Bolt Loosening Using YOLOv5. Sensors 2022, 22, 5184.
- Yan, B.; Fan, P.; Lei, X.; Liu, Z.; Yang, F. A Real-Time Apple Targets Detection Method for Picking Robot Based on Improved YOLOv5. Remote Sens. 2021, 13, 1619.
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944.
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8759–8768.
- Lin, T.; Maire, M.; Belongie, S. Microsoft COCO: Common Objects in Context. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 740–755.
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.1K
Revisions:
4 times
(View History)
Update Date:
30 Jun 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No