Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Aisyah Marliza Muhmad Kamarulzaman | -- | 6114 | 2023-06-12 08:35:54 | | | |
| 2 | Rita Xu | Meta information modification | 6114 | 2023-06-12 08:54:42 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Muhmad Kamarulzaman, A.M.; Wan Mohd Jaafar, W.S.; Mohd Said, M.N.; Saad, S.N.M.; Mohan, M. Unmanned Aerial Vehicles Implementations in Urban Planning. Encyclopedia. Available online: https://encyclopedia.pub/entry/45432 (accessed on 25 June 2026).
Muhmad Kamarulzaman AM, Wan Mohd Jaafar WS, Mohd Said MN, Saad SNM, Mohan M. Unmanned Aerial Vehicles Implementations in Urban Planning. Encyclopedia. Available at: https://encyclopedia.pub/entry/45432. Accessed June 25, 2026.
Muhmad Kamarulzaman, Aisyah Marliza, Wan Shafrina Wan Mohd Jaafar, Mohd Nizam Mohd Said, Siti Nor Maizah Saad, Midhun Mohan. "Unmanned Aerial Vehicles Implementations in Urban Planning" Encyclopedia, https://encyclopedia.pub/entry/45432 (accessed June 25, 2026).
Muhmad Kamarulzaman, A.M., Wan Mohd Jaafar, W.S., Mohd Said, M.N., Saad, S.N.M., & Mohan, M. (2023, June 12). Unmanned Aerial Vehicles Implementations in Urban Planning. In Encyclopedia. https://encyclopedia.pub/entry/45432
Muhmad Kamarulzaman, Aisyah Marliza, et al. "Unmanned Aerial Vehicles Implementations in Urban Planning." Encyclopedia. Web. 12 June, 2023.
Copy Citation
The rapid growth of urban populations and the need for sustainable urban planning and development has made Unmanned Aerial Vehicles (UAVs) a valuable tool for data collection, mapping, and monitoring.
drones
urban planning
remote sensing
urban development
1. Introduction
Any country’s key economic objectives include urban planning and development, which is attributed to a variety of factors, with the most important being the country’s growing population [1]. To ensure the sustainable growth of cities and to fulfill the exploding demands of their inhabitants, population growth results in the need for increased quantities of resources, new development and optimized residential strategies, land-use/land-cover change policy amendments, and additional environmental management systems. Along with that, there exists an implicit obligation to ensure that the introduction of modern buildings and urban housing schemes does not dismantle the palimpsests of a country’s celebrated past; these heritage monuments hold a colossal amount of unique tales traced from its history that the coming generations can learn from Abdullah et al. [2] From this point of view, current and comprehensive data on the nature and expansion of urban systems on both a regional and global scale are essential for the proper development of any nation and its many cities [3]. The quick expansion of cities, the process of becoming more urbanized, and the difficulties that come with expansion have resulted from the migration of more than half of the populations of rapidly developing nations such as Malaysia, Indonesia, and Thailand [4]. The informal growth of cities in developing regions such as South America and Asia is a complex phenomenon that has several underlying factors. Rapid urbanization, population growth, limited resources, and inadequate urban planning are some of the key drivers behind this informal growth.
Urbanization refers to the change in the proportion of individuals residing in rural versus urban areas, and it should not be combined with urban growth, which measures changes within urban zones. Cities such as Kuala Lumpur, Jakarta, and Bangkok, which serve as hubs for society, politics, commerce, and the arts, are prime examples of where this phenomenon is observable. These crises emphasize the pressing requirement to develop sustainable urban planning strategies that safeguard historic sites, expand green spaces, reduce inequalities in wealth distribution, regulate pollution and carbon emissions, and cater to citizens’ needs through active public participation [5][6]. These strategies must also adhere to the development control guidelines, protocols, and policies established by their respective legislative and administrative bodies. Since limitations frequently constrain these approaches, such as time, capital, and labor availability, researchers cannot identify or solve these problems by solely relying on conventional data collection methods, such as obtaining the information through statistics and field surveys [7].
Mapping from airborne aerial images might be considered a solution for addressing the shortcomings of conventional field-based methods, but its poor spatial and temporal resolution puts constraints on its effectiveness [8]. Recently, emerging remote sensing methods and land-observation-driven spatial modeling approaches have begun to take root in Malaysia and have been developed as viable instruments for supplying current data with sufficient detail to advance the urban sector as well as its strategic planning [9]. Most of the ongoing remote-sensing-based urban development applications employ publicly available optical imagery and, in some instances, airborne laser scanning data (light detection and ranging; LiDAR) or Geographical Information System (GIS) tools were used. For instance, Nor et al. [10] utilized temporal SPOT satellite imagery to analyze the land-use cover change in Melaka City. Using the supervised classification method, Malaysia was able to effectively categorize three types of land use—built-up areas, green spaces, and water bodies. The authors highlighted the prospects of monitoring land-use changes in historical cities using remote sensing techniques; the results are useful to the authorities who are accountable for the creation and maintenance of resilient and sustainable environments. Nevertheless, restrained flexibility in positioning the focus, insufficient spatial resolution, and disturbances caused by clouds and lags in the continuous stream of data restrict satellite-based analyses from being applied to site-specific quotidian construction projects. UAV (Unmanned Aerial Vehicle) LiDAR data have the capability to fill these dents as they can provide high-density point clouds that can replicate the objects and terrain of the study area [11]. The development of UAVs [12] has enabled society’s efforts and demonstrated their potential to supplement and occasionally replace other types of remote sensing for conventional urban area investigation and monitoring methods [10]. UAVs are considered a more powerful tool in urban planning and development fields because they can provide high-quality images, define study areas, create 3D models using detailed point clouds, are easy to operate, are cost-effective, can provide real-time updates, and can be used frequently. Advances in software and machine learning have further expanded the possibilities of UAV applications [13]. The use of deep-learning methods for super-resolution reconstruction has made progress in recent years, but most existing models generate unsatisfactory results on real-world low-resolution images. In aerial photography using UAVs, this problem is exacerbated by compression and fusion processing with a resulting loss of texture detail. To address this, the authors from [14] propose a Novel Dense Generative Adversarial Network For Real Aerial Imagery Super-Resolution Reconstruction (NDSRGAN) which uses smooth L1 loss to accelerate convergence. The model achieves good performance on quantitative metrics and visual perception.
Google Earth is an online geographic information system that offers high-resolution satellite imagery, aerial photographs, and 3D terrain data of the Earth’s surface. Introduced by Google in 2005, as stated in [15], it has become a crucial tool for obtaining territorial information for various purposes, including research, planning, and decision-making. One of its significant advantages is its ability to provide geographical data at various scales, from a global perspective to a detailed street-level view, making it an ideal platform for obtaining territorial information. Additionally, Google Earth is increasingly used in education to provide an interactive and immersive learning experience on topics such as environmental science and geography [16]. UAVs can be used to navigate over a region while carrying cameras or other sensors to take high-resolution pictures or gather information such as height, temperature, or vegetation indices. The processed data and photos can subsequently be integrated into mapping software, such as Google Earth. UAVs are frequently used to collect current imagery and geospatial data for a variety of applications, including urban planning, agriculture, environmental monitoring, and disaster response. In order to create more up-to-date and thorough visualizations of the Earth’s surface, the data collected by UAVs can be processed and integrated into Google Earth. Acknowledging these features, UAVs have started to be utilized for aerial mapping, 3D modeling, and site assessment of various city environments in Malaysia. For instance, Noor et al. [10] analyzed land-use patterns in traditional Malay cities by utilizing point clouds obtained from a multi-rotor UAV. The evaluation centered on three elements—buildings, land use, and street conditions—to determine whether urban growth has exceeded the limits established by cultural heritage values and ancient architecture. Subsequently, Abdullah et al. [2] went a step further in his study and employed the 3D mapping capabilities of UAVs to detect historical buildings and assess the urban layout and height of multi-story buildings in the urban areas of Kota Bharu, Kelantan, Malaysia.
Large-scale UAV applications that utilize the latest technologies, automated workflows, cloud-sharing capabilities, and classification algorithms for providing real-time support to urban planning operations are not yet fully developed in Malaysia. Considering the previous urban application studies undertaken using UAVs and concerning the current urbanization rates in Malaysia, UAVs certainly hold substantial potential for assisting the economic growth and sustainable prospective plans of the country. The large scale of UAVs can, in turn, leverage the design and implementation strategies of large infrastructure projects which require the acquisition of extensive data and detailed mapping, as well as regular inspections in areas that are hard to reach and considered unsafe [17]. In sum, to make the best use of this opportunity, all the locals including city planners, architects, modelers, decision-makers, government officials, and most importantly, the common public need to understand, accept, and adopt integrated approaches that employ UAVs for tackling complex urban-planning-related issues. Only then can synergy be developed between the data and technology at hand and its applicability, which entails the integration of these advancements and information into existing urban systems and concepts [3].
2. Eyes on the Sky: A Transforming Skyline
2.1. UAV Remote Sensing Perspective of Urban Planning
Remote sensing uses sensors to gather data about an object or phenomenon while avoiding direct physical contact [18][19]. Typically, satellite or aerial imagery is used for this, which can offer helpful information on various variables such as land-use patterns, vegetation coverage, and environmental changes. In disciplines such as geography, environmental science, agriculture, and urban planning, remote sensing is frequently used to gather and evaluate data from vast areas that would be challenging or time-consuming to survey on the ground [20]. New sensors and methods are constantly being created to deliver more precise and detailed data, which is how remote sensing technology continuously improves. Remote sensing was first practiced in the 1840s when aerial photos of towns and landscapes were taken using balloons. In their paper, the authors of [21], describe that aerial photography spread throughout the decades, and the military started utilizing it for surveillance during World War I. After the Soviet Union launched Sputnik 1, the first satellite, in 1957, individuals quickly realized the potential of employing satellites to gather data from orbit.
Since the launch of the first remote sensing satellite for earth’s resources and environmental monitoring, i.e., Landsat-1, in 1972, the data received have been used in various applications, including urban planning [22]. The spectral, spatial, radiometric, and temporal resolutions are the limiting factors to a wide range of applications. Since the launch of Satellite Pour l’Observation de la Terre (SPOT-1) in 1986, with better spatial resolution and stereo capability, it has been possible to enhance applications in areas such as topographical mapping. Since then, many satellites have been launched with better spatial and spectral resolutions, broadening the data’s applications [21]. Acquiring data frequently makes it easier to track changes over time and spot trends and anomalies. Many platforms, such as satellites, aircraft, UAVs, and ground-based sensors, can be used for remote sensing. Each platform has pros and cons depending on the application and preferred resolution. They can be used to monitor natural resources, track changes in how land is used, and identify environmental risks. Remote sensing data are frequently processed using image processing techniques such as classification, augmentation, and analysis to extract useful information from the imagery. Automated data processing and analysis can also be done using machine learning methods. Applications that utilize remote sensing technology may move towards using UAVs that can operate at higher altitudes. These UAVs can be larger and can accommodate more safety and security features. With new sensors and platforms such as UAVs, remote sensing technology has evolved dramatically in recent years, making collecting data from locations more straightforward and affordable [23]. Today, a wide range of applications use remote sensing data, from studying the effects of climate change to monitoring natural catastrophes and mapping land use and vegetation cover.
Advancements in UAV remote sensing have brought many benefits, making them an amazing technology with many advantages over traditional data collection methods [24]. UAVs are highly maneuverable and can access difficult or dangerous areas, allowing for greater flexibility in data collection. They can capture high-resolution imagery, providing more detailed information about the target object or environment. UAV remote sensing can be quickly deployed and provide rapid data collection, useful for time-sensitive applications such as disaster response or monitoring rapidly changing conditions. It can also be more cost-effective than traditional methods, especially for smaller areas. It requires fewer resources and can provide real-time data collection and analysis, allowing immediate decision-making and response [25]. This technology captures data across multiple spectral bands, which can provide insights into different properties of the object or environment being studied. Overall, remote sensing offers a powerful data collection, research, and monitoring tool, with many advantages over traditional methods. They are an outstanding and highly advantageous technology because their improvements keep opening new possibilities for various applications in many sectors [26][27]. A systematic literature review by [28] analyzed 186 articles to evaluate the integration of remote sensing, ecology, and urban planning. The study found that only 12% of the articles fully integrated all three disciplines, with the majority of studies focused on contributing to the knowledge base or monitoring the impacts of policies. The accessibility of scientific findings remains limited; most articles are not open access and proprietary software, and data are frequently used. The study suggests future avenues for science and potential entry points for remote sensing to become a vital tool in urban planning.
Remote sensing has been used in urban areas since the early days of aerial photography. Aerial photographs were used to create maps and plans of cities and later to monitor urban growth and development [29]. Satellite remote sensing has been particularly useful for monitoring urban areas because it can cover large areas quickly and cost-effectively. In recent years, advances in satellite technology have made it possible to collect even more detailed and accurate data, enabling urban planners and policymakers to make more informed decisions about managing and developing cities [28]. Large-scale, high-resolution datasets on urban environments, such as land use and land cover, urban expansion, and developments in the built environment through time, are gathered by satellites [30]. The authors of [31] utilize remote sensing data, including land-cover and imperviousness data from the National Land Cover Database (NLCD) 2001–2016, to investigate urban expansion in the Texas Triangle megaregion. Results reveal decreasing urban expansion trends driven by population and economic growth, with pro-sustainability initiatives by anchor cities and metropolitan planning agencies attributed to the changing trend. The study also uses transportation and socio-demographic data from the Texas Department of Transportation (TxDOT) and the U.S. Census Bureau, respectively. Monitoring substantial urban areas and spotting changes that could be challenging to spot on the ground is made possible significantly by satellite data. Lasers are used in the remote sensing technique known as “LiDAR”, which measures the separation between such a sensor and a target [32]. According to [33], LiDAR data can produce accurate 3D models of urban settings, which benefit disaster management, architecture, and urban planning. There are negative impacts of urban sprawl, such as climate change, energy and water resource depletion, pollution, and loss of wildlife and agricultural land, among others. The author of [34] emphasizes the importance of remote sensing techniques, particularly satellite remote sensing, for effective planning and policy support in monitoring urban growth and minimizing urban sprawl and also outlines various methods for monitoring urban changes and the challenges of urban mapping. The benefits of using remote sensing to monitor urban areas include timely and accurate change detection to develop strategies for minimizing urban poverty and related environmental effects. Due to their high spatial resolution data collection capabilities and ease of deployment to targeted regions of interest, UAVs are increasingly employed in urban applications [35]. UAVs are used for various tasks, including mapping urban infrastructure, checking air quality, and determining the extent of natural catastrophe damage [36]. The classification process uses remote sensing data to identify and classify various forms of land cover or land use in metropolitan areas. Area evaluation entails measuring and quantifying several elements of the urban environment using remote sensing data [37]. Examples of this are assessing the size of buildings, roads, and other infrastructure, as well as the amount of open space and water bodies in an urban region. The distribution of resources and infrastructure in metropolitan areas and the location of regions vulnerable to environmental risks can be understood through area assessment. To identify and map the boundaries between various land-use or land-cover categories in urban settings, border estimation uses remote sensing data. Techniques such as image segmentation can be used to separate an image into segments based on similarities in color, texture, or other properties. Many applications, including urban planning, emergency management, and environmental monitoring, might benefit from border estimation [38]. Recent research has indicated that urban planning necessitates two spatial scales, each with unique remote sensing requirements: the local and strategic scales. The local scale focuses on monitoring specific site planning and identifying objects such as building facades. As explained by the authors in [39], the strategic scale is centered on planning and monitoring overall land use (zoning) in cities, which encompasses various categories of urban land-use functions such as residential, industrial, and commercial areas, but at a larger city block scale. A remote sensing task performed can be categorized into classifications: object-based and pixel-based [40][41], urban analysis [42], land-use/land-cover (LULC) change [43], urbanization monitoring [44], monitoring urban heat island [45], and the societal impacts of using UAVs for urban informal settlements by [46]. Pertaining to urban growth, the authors of [47] use night-time light data to analyze urban growth in the Indian-Gangetic planes, proposing a new method for urban area extraction and using machine learning algorithms to predict future growth. The results suggest a methodology for understanding urban areas at the regional scale. A study by [48] highlights the use of remote sensing and GIS to identify the most suitable sites for urban expansion in Haridwar City, Uttarakhand, by analyzing multiple thematic layers, including land use, slope, elevation, NDVI, and ULD. Urban planning is a multifaceted and intricate process that strives to predict and prepare for future situations. Thus, it must balance the advantages and disadvantages concerning all aspects of the urban system [49].
Gallacher et al. [50] pointed out, UAVs have recently demonstrated their potential for usage in a wide range of activities, many of which take place in urban areas. Applications for monitoring in low-risk urban settings include flights over unpopulated locations such as water bodies or steep hills or flights that involve vertical flying.
2.2. Background of UAVs
A UAV can be either a remotely piloted flying robot or an Unmanned Aerial Vehicle that can fly itself using a predetermined flight plane stored in its onboard processor [51][52]. The First World War contributed to the creation of UAVs. The concept of autonomous aerial vehicles is attributed to the Dayton-Wright Airplane Company, which developed a torpedo that would explode at a predetermined time. The Hewitt-Sperry Automatic Airplane project later created another aerial torpedo, which was designed to deliver explosives to enemy territory [53]. As a result, the first UAVs were created in massive amounts during World War II, and their numbers kept increasing as the Cold War started. Although the military sector was the sole focus of UAV development in the early decades, more recent technological advances in the fields of robotics, image processing, machine learning algorithms, artificial intelligence, and global navigation satellite systems (GNSS), as well as an increase in accessibility due to price reductions and production rates, have expanded the uses of UAVs to civilian (non-military) purposes [54].
2.3. UAV Categories
There are numerous categories that UAVs might fall under depending on their uses: size, weight, number of propellers, aerodynamic flight principles, range, equipment, cameras used, and other factors. In activities related to the urban planning industry, rotary-wing and fixed-wing UAVs are the most applied, with the distinction between them being based on variances in their aerodynamic flight principles [55]. Motors that use rotary-wing technology are more commonly used because they are more accessible, simple to operate, provide reasonable camera control, can operate in limited places, and support hover and vertical take-off and landing (VTOL). The rotary-wing UAVs can be further divided into tri-copters, quadcopters, and hexacopters, depending on the rotor configurations. However, in their study on rotary-wing UAVs, González-Jorge et al. [56] stated that the flying times of all these UAVs are constrained to no more than 30 min, and they have a small payload capacity (mostly below 8 kg; USI). Fixed-wing UAVs, on the other hand, have a long endurance and can cover a large area quickly. In this instance, the costs associated with the equipment, the amount of space needed for take-off and landing, and the difficulty of flying—which necessitates sufficient training—are the restraints [57]. Hybrid UAVs, which combine the advantages of fixed-wing UAVs with the capacity to hover and take off and land vertically, have also begun to enter the UAV markets more recently [58]. Irrespective of the UAV’s category, its key components and subsystems include the frame, propeller, brushless motors, motor mount, landing gear, flight controller, batteries, payload (which could be a remote sensing camera, spraying system, or applications that pertain to logistics), and sensors [59].
UAVs of the quadcopter/multirotor and fixed-wing varieties have distinctive design elements and flight characteristics (Figure 1). As the name implies, quadcopter/multirotor UAVs contain several rotors, typically four or more, placed symmetrically. The flight controller controls the electric motors that usually power the rotors. Quadcopters are incredibly agile and can fly in any direction, hover in place, and engage in aerial tricks. They are frequently used for leisure activities, including racing and freestyle flying, aerial photography, and filming. On the other hand, fixed-wing UAVs have a solid, fixed wing that produces lift and enables the UAV to fly ahead. They have a propeller to help them go ahead and are propelled by a motor. Fixed-wing UAVs can travel great distances quickly and are built for more extended flight periods. They are frequently used for military and search and rescue operations and other applications such as monitoring, mapping, and surveying. Based on their capabilities, both types of UAVs are utilized for various applications, each with unique advantages and limitations [60].

Figure 1. A high-quality image of (a) quadcopter/multi-rotor and (b) fixed-wing UAVs.
Yunus et al. [61] clarified several interdependent parts that allow for autonomous flight and precise control (Figure 2). The frame serves as the supporting structure for the rest of the machine. UAVs rely on motors, which are electric motors that turn the UAV’s propellers. Aerodynamic lift is created by rotating the propeller’s blades, which also steer the aircraft. A UAV’s flight path is determined by its flight controller, a miniature computer that receives data from the UAV’s sensors. The UAV’s sensors include an accelerometer, a gyroscope, a barometer, and a Global Positioning System (GPS). The lithium polymer (LiPo) battery can be recharged and supplies energy for electronics and motors. An optional extra, a camera records high-altitude video and stills. The pilot’s ability to direct the UAV’s flight and actions is realized through a transmitter. These parts cooperate to ensure the UAV can take off, fly, and land without incident and gather helpful information or images [61][62].
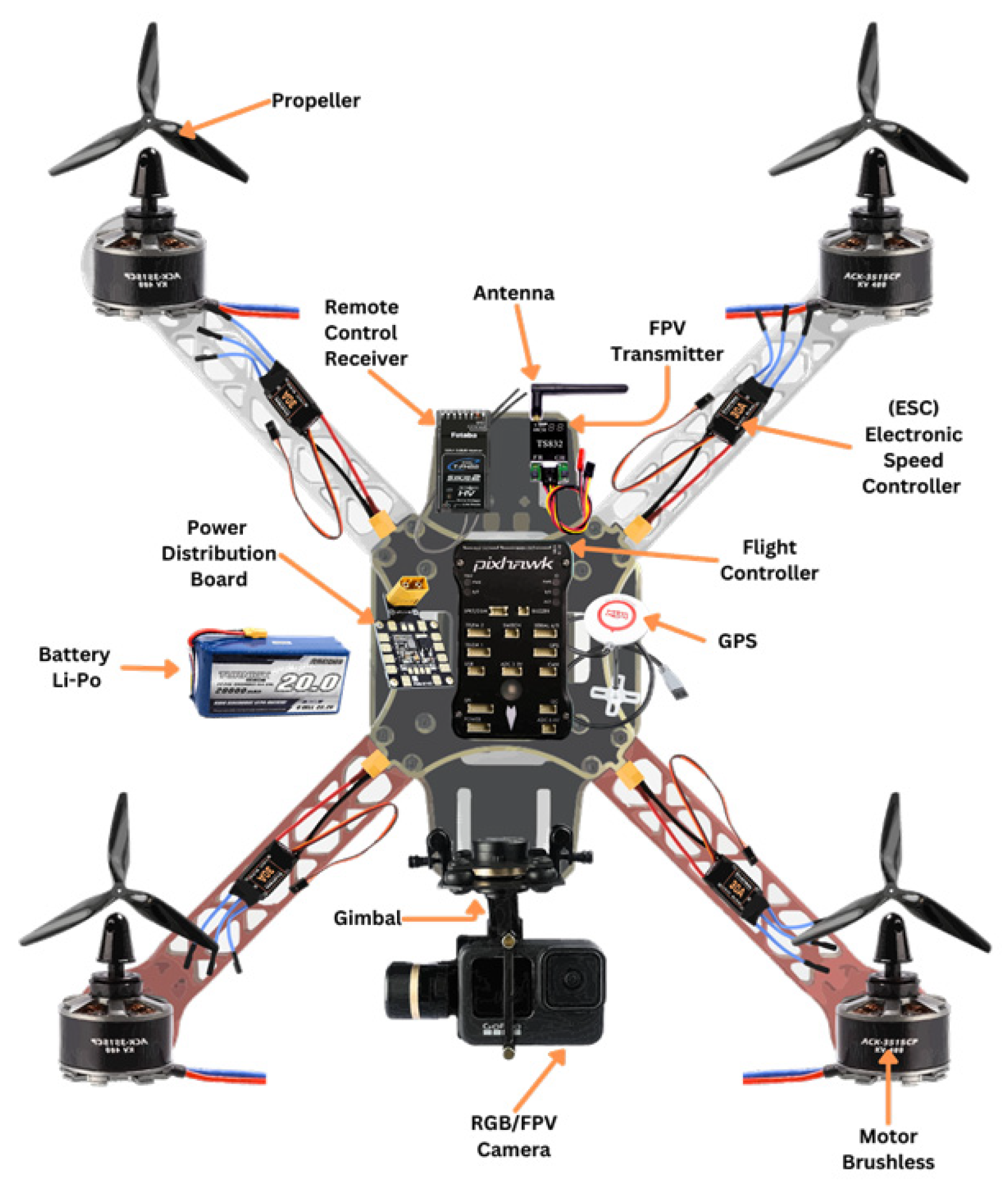
Figure 2. Overview of UAV components.
2.4. UAV Data
Aerial images and 3D point clouds are the two main datum types that UAVs gather for remote sensing and analytic applications. With advancements in UAV technology, 2D aerial imagery acquired via UAV is becoming increasingly accessible and cost-effective, making it a popular tool for various industries and applications [63]. In addition, Latha et al. [64] referred 2D aerial imagery taken by UAVs to two-dimensional (2D) images of the earth’s surface acquired using UAVs. The images captured by these UAVs can give valuable data and insights for various industries, including agriculture, construction, real estate, and environmental monitoring. Using cameras mounted to UAVs, 2D aerial imagery may be taken from multiple angles and heights, offering a full view of the target area. The images are then processed to provide a versatile 2D aerial map or ortho photo. As they offer a precise perspective of the landscape and features, these photos are frequently utilized for mapping, surveying, and monitoring reasons [65]. The author of [66] defines 3D aerial imagery captured by UAVs as aerial photos taken by UAVs that offer a three-dimensional (3D) representation of the earth’s surface. This type of imagery is capable of providing a more detailed view of a location compared to 2D aerial imaging, enabling more precise measurements and analysis (Figure 3). UAVs can take 3D airborne images utilizing various techniques, such as photogrammetry and LiDAR technology [65]. On the other hand, LiDAR technology uses laser sensors to produce a 3D point cloud that may be utilized to build a 3D model. Applications for 3D airborne imaging include geological surveys, monitoring of building sites, and urban planning [67]. It can also be used to create 3D models and maps of structures, infrastructure, and other things and to visualize and analyze topography, such as mountains and valleys. UAV technological advancements have made recording 3D aerial imagery of a particular location more accessible and more affordable than ever, making it a method many businesses utilize.
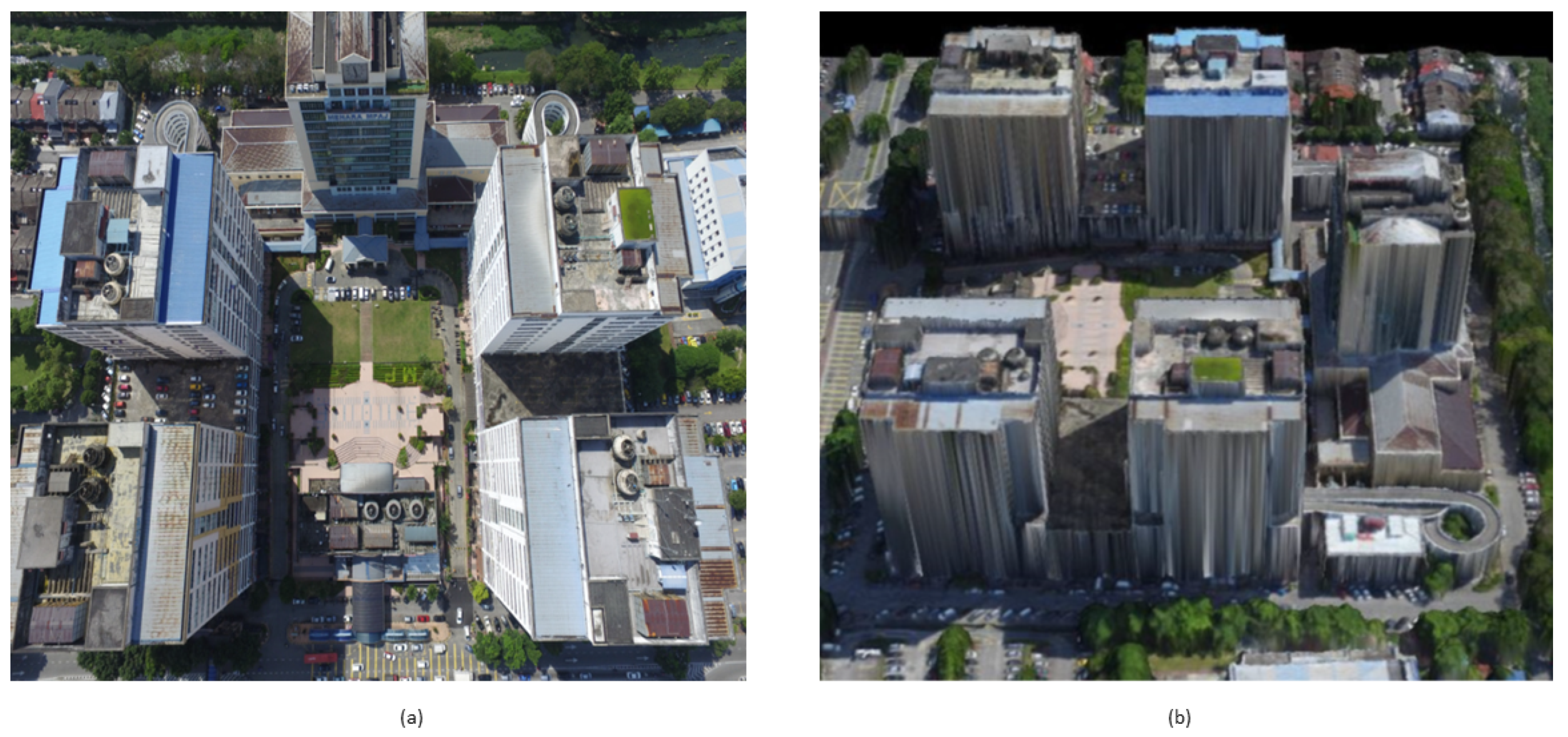
Figure 3. Type of imagery (a) 2D aerial imagery acquired via UAV; (b) 3D model built from UAV imagery.
2.5. UAV-as-a-Service Sector
Researchers have been studying UAVs’ advantages through other remote sensing methods since the early 2000s. Their findings support the conclusion that UAVs are superior because of their high-resolution imagery, accessibility, ease of functionality, applicability in confined spaces, and frequency of operations. Furthermore, all the required tasks could be carried out without compromising the safety of anyone involved [68]. The development of robotic systems, artificial intelligence, data science, and software engineering has facilitated machine learning of flights and workflows associated with data analysis. This includes the implementation of different algorithms for machine learning and classification techniques, as well as the faster processing of software. These advancements have greatly benefited the UAV industry. As a result, when UAVs first appeared on the market, businesses were eager to take advantage of their advantages and frequently decided to replace expensive LiDAR data and low-resolution satellite data with the “newly discovered panacea”. The Federal Aviation Administration (FAA) has become more lenient concerning UAV regulations in the United States, which is one factor in expanding commercial UAVs. As noted by the author of [69], the dominant position of Chinese company Da-Jiang Innovations (DJI) in the consumer-UAV market is an important factor that affects jockeying start-ups in the UAV market. However, the commercial UAV market has changed significantly in recent years, and researchers have seen a shift in the primary focus from UAV services and software solutions to UAV services and robotics research, which was previously focused on hardware components and robotics research [70]. This heralds the beginning of the drone-as-a-service industry and says a lot about the usefulness of the data collected by UAVs (Figure 4).

Figure 4. Pictures showing UAVs being used for (a) delivery/first aid; (b) construction purposes.
Companies specializing in UAV operations, such as Measure and Cyberhawk in the United States, Hemav in Spain, and Aonic in Malaysia, focus on areas such as inspection, mapping, and surveying that are essential for urban planning. These companies aim to provide services that revolutionize the way decision-makers handle their organizations’ time, energy, efficiency, and safety needs [71]. Moreover, the UAV industry has been successful in generating job opportunities for tens of thousands of people within a short span of time and is expected to maintain its dominance in the years ahead. A recent study by the Association for Unmanned Vehicle Systems International (AUVSI) attests to this fact [72], which revealed that the UAV industry is predicted to generate more than 100,000 jobs in the United States alone over the next ten years, contributing USD 13.7 billion to the country’s economy. The author of [73] highlights a major concern arising from the greater automation and adaptability of machines, which is the replacement of human jobs. This is especially worrying for those in the unskilled labor sector.
2.6. Applications of UAVs
UAV use has increased dramatically over the past few years, expanding into new arenas and gaining momentum regularly. Lutkevich et al. [74] emphasized that UAVs are becoming increasingly important to our daily lives as they open new avenues for advancement in various fields. Precision agriculture, forestry, construction, survey, disaster relief, humanitarian aid, anti-poaching, security and surveillance, and education are just a few of these applications’ most important use cases. Farmers can determine environmental indicators such as the Normalized Difference Vegetation Index (NDVI) using multi-spectral cameras mounted on UAVs [75]. Recently, UAVs have also been used for planting trees, and it was discovered that the rate at which they planted trees was ten times faster than that of human labor. This not only enables researchers to save time but also provides an alternative that can be used to combat deforestation more practically [76]. Apvrille et al. [77] analyzed whether UAVs could be useful in the aftermath of natural disasters and proclaimed the potential of UAVs for use in tasks related to safety and security verification.
To push the boundaries of remote sensing research, UAVs have been modified to acquire LiDAR and Synthetic Aperture Radar (SAR) data [78]. Wallace et al. [79] produced 3D point clouds using a low-cost UAV-LiDAR framework and reported improved spatial accuracy when conducting forest inventory operations. Another study, led by [80], compared this same spatial accuracy of a UAV-LiDAR system compared to Structure from Motion (SfM) remote sensing data and found that UAV-LiDAR offers advantages over SfM photogrammetry for estimating vegetation height and surface elevation. UAV technology is continuously developing and improving in ground-breaking ways, and it has become an essential part of how many businesses and governmental organizations operate. Their applications are anticipated to increase tenfold in the upcoming decades as they cut through sectors that are either static or falling behind [81].
2.7. Policies, Rules, Regulations, and Limitations
A significant hurdle to commercial UAV industries was and is still the regulation and policies associated with UAV flying that are put forward by each country or continent’s aviation administration systems. The rules are very lenient in some countries, such as Sweden and Norway. They have enacted relatively unrestricted legislation on commercial UAV use, whereas in countries in East Asia such as Thailand and South Korea, a visual line of sight is required, thus limiting their potential range. Meanwhile, in certain countries such as India and Chile, there still exists an effective ban on the commercial use of UAVs [82]. In Malaysia, a private pilot’s license and an operating permit are needed to fly commercial UAVs that weigh more than 20 kg. The use of aerial mapping is sometimes limited, particularly from a precision agriculture standpoint, because carrying some UAV types, such as those with multiple sensors, is prohibited in some nations. These sensors are regarded as a possible threat to national security. Unfortunately, these disparate regulations and the absence of unified guidelines for using UAVs have hindered opportunities for the exchange and mobility of research in several instances [83].
UAVs are becoming increasingly popular in various industries, including agriculture, construction, surveying, and aerial photography. However, due to their potential impact on the environment, there are some environmental restrictions that apply to their use. Weather UAVs are not built to function in severe weather conditions because such conditions may negatively affect their performance and safety. According to Thibbotuwawa et al. [84], in heavy rain, water could damage the UAV’s electronics and engines, making it prone to malfunction or even a crash. Strong winds may cause the UAV to become unstable and challenging to handle, increasing the risk of accidents. Additionally, high humidity and cold weather may obstruct the UAV’s sensors and cameras, making it difficult to fly and navigate. As per the information presented in [85], it is crucial to verify the weather forecast before flying a UAV to ensure that the operation is safe and effective. If there is a possibility of adverse weather conditions, it is best to avoid operating the UAV entirely or hold off until the conditions improve. Additionally, UAV pilots must know the restrictions and specifications of their UAV, including the manufacturer’s instructions concerning weather conditions. Many areas are designated as protected under national or international laws to conserve wildlife, ecosystems, and cultural heritage sites. UAVs may not be permitted to fly in these areas or may require special permits to do so. Lopez et al. [86], in their study, stated that the use of small UAVs is increasing, but their impact on local fauna has not been systematically evaluated. The authors reviewed existing literature and conducted a pooled analysis, finding that wildlife reactions depend on the attributes of the UAV and the characteristics of the animal. They suggest guidelines to minimize the impact of UAVs on wildlife and proposed that a legal framework needs to be adopted to protect wildlife from negative effects. Duffy et al. [87] indicated that multi-rotors can create more noise pollution than fixed-wing UAVs since they have more rotors and engines, and therefore can cause disturbance to wildlife, which may undermine the purpose of a survey. As the author of CASA et al. [88] points out, there are typically few regulations in place for flying UAVs for recreational or experimental purposes, and in many cases, a pilot’s license is not needed. However, it is important to recognize that the regulations for recreational or experimental UAV use differ significantly from those for commercial UAV use. There are some legal requirements that apply to UAV usage regardless of the purpose or country, such as not flying near airports, government buildings, or monuments; maintaining a line of sight; following height restrictions; and obtaining the necessary licenses and certifications for the pilot. These regulations exist to ensure the safety, security, and privacy of individuals. The allowable proximity to the no-fly zones can vary depending on failure to adhere to the rules, and the requirements for the permit can result in significant financial penalties for the civilian offender. Nevertheless, this obstacle that UAV users must overcome has been a boon to many software companies.
Various mobile applications have been created in this regard to assist UAV users in identifying airspace areas and avoiding non-designated zones. These applications are intended to guide UAV users in these activities [89]. There are several mobile apps available that display UAV-flying zones and policies and regulations related to UAV usage (Figure 5), and these apps are designed to help UAV pilots fly safely and legally within the regulations and policies set forth by governing authorities.
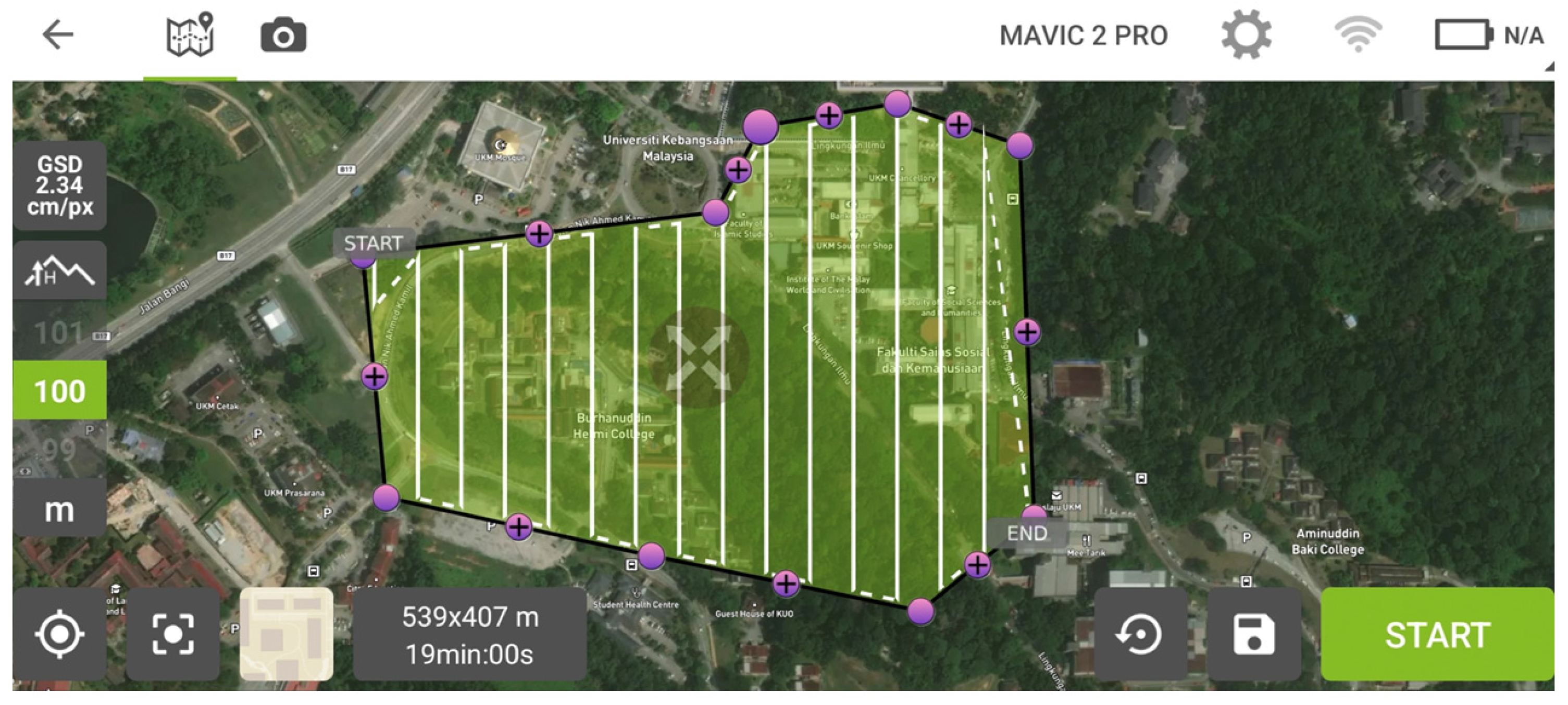
Figure 5. Mobile app displaying UAV-flying zones.
The process of obtaining permits can be time-consuming and may limit the flexibility of UAV operators. In Malaysia, the use of UAVs is regulated by the Civil Aviation Authority of Malaysia (CAAM). According to [89], operators must obtain permits and follow strict guidelines to ensure the safe and responsible use of UAVs. UAV operators in Malaysia must obtain a Permit to Fly from CAAM. The permit specifies the type of UAV, the pilot’s qualifications, and the purpose of the flight. All UAVs weighing more than 20 kg must be registered with CAAM. Operators must provide the UAV’s specifications, serial number, and other information to register the UAV. There are several no-fly zones in Malaysia where UAVs are prohibited. These include airports, military bases, and other sensitive areas. UAVs must not fly higher than 400 feet (121.92 m) above ground level and must maintain a distance of at least 50 m from people, vehicles, and buildings. UAV operators in Malaysia must have liability insurance to cover any damage or injury that may occur during UAV flights. Night flights are prohibited for UAVs in Malaysia unless the operator obtains special permission from CAAM. Operators using drones for commercial purposes must obtain a special permit from CAAM, and the UAV must meet specific requirements for commercial operations. It is critical to understand that the rules and regulations governing UAV usage in Malaysia are subject to change. It is equally necessary to ensure that one is constantly updated on any modifications or updates to the rules and standards [89]. In addition, the individuals who operate UAVs must ensure that they comply with all applicable legislation and applicable guidelines.
Another limitation is the cost associated with high-profile UAVs, mostly fixed-wing, and the processing and analyzing expenses attached to the data analysis procedures. A commercial UAV’s usefulness level is measured by the satisfaction obtained after extracting needed information from the data collected. For that, understanding flight plan settings and values for parameters used while applying an algorithm is important; for example, even when using a UAV for mapping and modeling a study site and taking a colossal number of pictures, if the minimum overlap is very low, then the algorithm cannot build 3D models from it. Since there is not yet an anyone-for-all methodology or parameter threshold that can be applied to UAV data, finding ways to optimize flight and UAV configurations, determining parameter values, and algorithm selection can be demanding for amateur UAV users [90]. External factors such as wind, rain, and level of sunlight may also present additional challenges, affecting the accuracy of the data gathered. The lack of sophisticated hardware in several available UAVs also limits their usage; UAVs that do not feature obstacle detection and collision avoidance features run a high risk of getting damaged fast [91]. However, in the case of fixed-wing UAVs, it is still complicated for an inexperienced operator to pilot the aircraft safely, as noted by Dollesh et al. [92]. When a UAV flies beyond a certain height (or radius) or the battery level drops, it can lose control; this is especially true for rotor-wing UAVs, which have a short battery life and are unsuitable for large-scale studies [57].
References
- Steuteville, R.; Dover, V.; Dittmar, H.; Low, T.; Crabtree, P.; Burden, D.; Marshall, W.; Thadani, D.; Moule, E.; Talen, E.; et al. 25 Great Ideas of New Urbanism; Public Square: La Mesa, CA, USA, 2018; Available online: https://www.cnu.org/sites/default/files/25-great-ideas-book.pdf (accessed on 18 April 2023).
- Abdullah, S.; Abdul Rashid, M.F.; Tahar, K.N.; Osoman, M.A. Tree Crown Mapping Based on Unmanned Aerial Vehicle (UAV) Towards A Green-Sustainable Residential. J. Malays. Inst. Plan. 2021, 19, 97–107.
- Esch, T.; Taubenböck, H.; Heldens, W.; Thiel, M.; Wurm, M.; Geiss, C.; Dech, S. Urban Remote Sensing-How Can Earth Observation Support the Sustainable Development of Urban Environments? In Proceedings of the Real CORP Coreference, Vienna, Austria, 18–20 May 2010; pp. 837–847.
- Ab Rahman, A.A.; Wan Mohd Jaafar, W.S.; Abdul Maulud, K.N.; Noor, N.M.; Mohan, M.; Cardil, A.; Silva, C.A.; Che’Ya, N.N.; Naba, N.I. Applications of Drones in Emerging Economies: A Case Study of Malaysia. In Proceedings of the 2019 6th International Conference on Space Science and Communication IconSpace, Johor Bahru, Malaysia, 28–30 July 2019; pp. 35–40.
- EPU. Twelfth Malaysia Plan, 2O21–2025 A Prosperous, Inclusive, Sustainable Malaysia; Economic Planning Unit, Prime Minister Department: Putrajaya, Malaysia, 2021.
- Castro, M.K.Q.; Agbisit, J.B. The ASEAN—The Road to Sustainable Cities; The ASEAN Secretariat: Jakarta, Indonesia, 2021; pp. 1–56. ISSN 2721-8058.
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking New Ground in Mapping Human Settlements from Space—The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42.
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned Aerial Vehicles (UAVs): Practical Aspects, Applications, Open Challenges, Security Issues, and Future Trends. Intell. Serv. Robot. 2023, 16, 109–137.
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the Advent of the Twenties: Where We Stand and What Is Next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242.
- Nor, M.M.; Mohd Noor, N. Integrating Satellite Temporal Analysis for Urban Morphology Study in Melaka. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012028.
- Hartley, R.J.L.; Leonardo, E.M.; Massam, P.; Watt, M.S.; Estarija, H.J.; Wright, L.; Melia, N.; Pearse, G.D. An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials. Remote Sens. 2020, 12, 4039.
- Granshaw, S.I. RPV, UAV, UAS, RPAS or Just Drone? Photogramm. Rec. 2018, 33, 160–170.
- Zhang, X.; Kusrini, K. Autonomous Long-Range Drone Detection System for Critical Infrastructure Safety. Multimed. Tools Appl. 2021, 80, 23723–23743.
- Guo, M.; Zhang, Z.; Liu, H.; Huang, Y. NDSRGAN: A Novel Dense Generative Adversarial Network for Real Aerial Imagery Super-Resolution Reconstruction. Remote Sens. 2022, 14, 1574.
- Liang, J.; Gong, J.; Li, W. Applications and Impacts of Google Earth: A Decadal Review (2006–2016). ISPRS J. Photogramm. Remote Sens. 2018, 146, 91–107.
- Ngom Vougat, R.R.B.; Chouto, S.; Aoudou Doua, S.; Garabed, R.; Zoli Pagnah, A.; Gonne, B. Using Google EarthTM and Geographical Information System Data as Method to Delineate Sample Domains for an Urban Household Surveys: The Case of Maroua (Far North Region-Cameroon). Int. J. Health Geogr. 2019, 18, 22.
- World Bank Tapping the Potential of Drones for Development. Available online: https://www.worldbank.org/en/topic/transport/brief/drones-for-development.print (accessed on 20 February 2023).
- Jawd, S.M.; Almuhana, W.H.Y.; Hussein, H.A. Technologies and Types of Remote Sensors. Adv. Electr. Devices 2021, 6, 15–23.
- Zhu, W.; Cao, Z.; Luo, P.; Tang, Z.; Zhang, Y.; Hu, M.; He, B. Urban Flood-Related Remote Sensing: Research Trends, Gaps and Opportunities. Remote Sens. 2022, 14, 5505.
- Almalki, R.; Khaki, M.; Saco, P.M.; Rodriguez, J.F. Monitoring and Mapping Vegetation Cover Changes in Arid and Semi-Arid Areas Using Remote Sensing Technology: A Review. Remote Sens. 2022, 14, 5143.
- Khorram, S.; van der Wiele, C.F.; Koch, F.H.; Nelson, S.A.C.; Potts, M.D. Principles of Applied Remote Sensing; Springer: Cham, Switzerland, 2016; ISBN 978-3-319-22560-9.
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current Status of Landsat Program, Science, and Applications. Remote Sens. Environ. 2019, 225, 127–147.
- Gallacher, D. Drone Applications for Environmental Management in Urban Spaces: A Review. Int. J. Sustain. Land Use Urban Plan. 2016, 3, 1–14.
- Mohd Jaafar, W.S.W.; Maulud, K.N.A.; Muhmad Kamarulzaman, A.M.; Raihan, A.; Sah, S.M.; Ahmad, A.; Maizah Saad, S.N.; Mohd Azmi, A.T.; Syukri, N.K.A.J.; Khan, W.R. The Influence of Deforestation on Land Surface Temperature-A Case Study of Perak and Kedah, Malaysia. Forests 2020, 11, 670.
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443.
- Saad, S.N.M.; Maulud, K.N.A.; Jaafar, W.S.W.M.; Kamarulzaman, A.M.M.; Omar, H. Tree Stump Height Estimation Using Canopy Height Model at Tropical Forest in Ulu Jelai Forest Reserve, Pahang, Malaysia. IOP Conf. Ser. Earth Environ. Sci. 2020, 540, 012015.
- Saad, S.N.M.; Wan Mohd Jaafar, W.S.; Omar, H.; Abdul Maulud, K.N.; Muhmad Kamarulzaman, A.M.; Adrah, E.; Mohd Ghazali, N.; Mohan, M. Modeling Carbon Emissions of Post-Selective Logging in the Production Forests of Ulu Jelai, Pahang, Malaysia. Remote Sens. 2023, 15, 1016.
- Wellmann, T.; Lausch, A.; Andersson, E.; Knapp, S.; Cortinovis, C.; Jache, J.; Scheuer, S.; Kremer, P.; Mascarenhas, A.; Kraemer, R.; et al. Remote Sensing in Urban Planning: Contributions towards Ecologically Sound Policies? Landsc. Urban Plan. 2020, 204, 103921.
- Alwedyan, S. Monitoring Urban Growth and Land Use Change Detection with GIS Techniques In Irbid City, Jordan. Int. Rev. Spat. Plan. Sustain. Dev. 2023, 11, 253–275.
- Núñez, J.M.; Medina, S.; Ávila, G.; Montejano, J. Satellite Information Classification and Interpretation; Rustamov, R.B., Ed.; IntechOpen: London, UK, 2019; ISBN 978-1-83880-567-8.
- Guo, J.; Zhang, M. Exploring the Patterns and Drivers of Urban Expansion in the Texas Triangle Megaregion. Land 2021, 10, 1244.
- Adrah, E.; Wan Mohd Jaafar, W.S.; Omar, H.; Bajaj, S.; Leite, R.V.; Mazlan, S.M.; Silva, C.A.; Chel Gee Ooi, M.; Mohd Said, M.N.; Abdul Maulud, K.N.; et al. Analyzing Canopy Height Patterns and Environmental Landscape Drivers in Tropical Forests Using NASA’s GEDI Spaceborne LiDAR. Remote Sens. 2022, 14, 3172.
- Dong, P.; Chen, Q.; Weng, Q. (Eds.) LiDAR Remote Sensing and Applications; CRC Press: Bloomfield, IN, USA, 2018; ISBN 978-1-4822-4301-7.
- De Paul, O.V. Remote Sensing: New Applications for Urban Areas. Proc. IEEE 2007, 95, 2267–2268.
- Soergel, U. Radar Remote Sensing of Urban Areas; Institute of Photogrammetry and GeoInformation: Hannover, Germany, 2010.
- Kucharczyk, M.; Hugenholtz, C.H. Remote Sensing of Natural Hazard-Related Disasters with Small Drones: Global Trends, Biases, and Research Opportunities. Remote Sens. Environ. 2021, 264, 112577.
- Tan, K.C.; Lim, H.S.; MatJafri, M.Z.; Abdullah, K. Landsat Data to Evaluate Urban Expansion and Determine Land Use/Land Cover Changes in Penang Island, Malaysia. Environ. Earth Sci. 2010, 60, 1509–1521.
- Gibril, M.B.A.; Kalantar, B.; Al-Ruzouq, R.; Ueda, N.; Saeidi, V.; Shanableh, A.; Mansor, S.; Shafri, H.Z.M. Mapping Heterogeneous Urban Landscapes from the Fusion of Digital Surface Model and Unmanned Aerial Vehicle-Based Images Using Adaptive Multiscale Image Segmentation and Classification. Remote Sens. 2020, 12, 1081.
- Sliuzas, R.; Kuffer, M.; Masser, I. The Spatial and Temporal Nature of Urban Objects. In Remote Sensing and Digital Image Processing; Springer: Berlin/Heidelberg, Germany, 2010; Volume 10, pp. 67–84.
- Anderson, J.R.; Hardy, E.E.; Roach, J.T.; Witmer, R.E. A Land Use and Land Cover Classification System for Use with Remote Sensor Data; Geological Survey: Alexandria, Egypt, 1976; pp. 1–34.
- Schöpfer, E.; Lang, S.; Srobl, J. Segmentation and Object-Based Image Analysis. In Remote Sensing of Urban and Suburban Areas; Rashed, T., Jurgens, C., Eds.; Springer Science: London, UK, 2010; Volume 10, pp. 181–192. ISBN 978-1-4020-4371-0.
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote Sensing UAV/Drones and Its Applications for Urban Areas: A Review. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012003.
- Lin, X.; Xu, M.; Cao, C.; Singh, R.P.; Chen, W.; Ju, H. Land-Use/Land-Cover Changes and Their Influence on the Ecosystem in Chengdu City, China during the Period of 1992–2018. Sustain. Switz. 2018, 10, 3580.
- Thapa, R.B.; Murayama, Y. Urban Growth Modeling of Kathmandu Metropolitan Region, Nepal. Comput. Environ. Urban Syst. 2011, 35, 25–34.
- Coutts, A.M.; Harris, R.J.; Phan, T.; Livesley, S.J.; Williams, N.S.G.; Tapper, N.J. Thermal Infrared Remote Sensing of Urban Heat: Hotspots, Vegetation, and an Assessment of Techniques for Use in Urban Planning. Remote Sens. Environ. 2016, 186, 637–651.
- Gevaert, C.M.; Persello, C.; Sliuzas, R.; Vosselman, G. Monitoring Household Upgrading in Unplanned Settlements with Unmanned Aerial Vehicles. Int. J. Appl. Earth Obs. Geoinf. 2020, 90, 102117.
- Maithani, S.; Shankar, H.N. Studying Urban Growth Dynamics in Indo-Gangetic Plain. In Advancements in Urban Environmental Studies: Application of Geospatial Technology and Artificial Intelligence in Urban Studies; Rahman, A., Sen Roy, S., Talukdar, S., Shahfahad, Eds.; Springer: Cham, Switzerland, 2023; pp. 101–111. ISBN 978-3-031-21587-2.
- Tiwari, A.; Tyagi, D.; Sharma, S.K.; Suresh, M.; Jain, K. Multi-Criteria Decision Analysis for Identifying Potential Sites for Future Urban Development in Haridwar, India. In ICCCE 2018; Kumar, A., Mozar, S., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2019; Volume 500, pp. 761–777. ISBN 9789811302114.
- Huxley, M.; Inch, A. Urban Planning. In International Encyclopedia of Human Geography, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2019; pp. 87–92. ISBN 978-0-08-102295-5.
- Gallacher, D. Drones to Manage the Urban Environment: Risks, Rewards, Alternatives. J. Unmanned Veh. Syst. 2016, 4, 115–124.
- Gonzalez, B. Issue 2 Article 3 1-3-2017 Drones and Privacy in the Golden State; 33 Santa Clara Computer & High Tech. L. J.: Santa Clara, CA, USA, 2017; Volume 33, p. 288.
- Uddin, M. Drone 101: A Must-Have Guide for Any Drone Enthusiast; Amazon Kindle: Washington, DC, USA, 2020.
- Palik, M.; Nagy, M. Brief History of UAV Development. Repüléstudományi Közlemények 2019, 31, 155–166.
- Kamarulzaman, A.M.M.; Wan Mohd Jaafar, W.S.; Abdul Maulud, K.N.; Saad, S.N.M.; Omar, H.; Mohan, M. Integrated Segmentation Approach with Machine Learning Classifier in Detecting and Mapping Post Selective Logging Impacts Using UAV Imagery. Forests 2022, 13, 48.
- Puchalski, R.; Giernacki, W. UAV Fault Detection Methods, State-of-the-Art. Drones 2022, 6, 330.
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2.
- Rennie, J. Drone Types_ Multi-Rotor, Fixed-Wing, Single Rotor, Hybrid VTOL. Available online: https://www.auav.com.au/articles/drone-types/ (accessed on 16 February 2023).
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A Survey of Hybrid Unmanned Aerial Vehicles. Prog. Aerospace Sci. 2018, 98, 91–105.
- Singh, N.K.; Muthukrishnan, P.; Sanpini, S. Industrial System Engineering for Drones: A Guide with Best Practices for Designing; Apress: Berkeley, CA, USA, 2019; ISBN 978-1-4842-3533-1.
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Engineering 2018, 2018, 110601.
- Yunus, A.M.; Hamzah, A.H.; Azmi, F.A. Drone Technology as A Modern Tool in Monitoring the Rural-Urban Development. IOP Conf. Ser. Earth Environ. Sci. 2020, 540, 012076.
- Nyamuhungu, D. The Design and Manufacture of A VTOL UAV. Master’s Thesis, University of Electronic Science and Technology, Sichuan, China, 2022.
- Liao, Y.; Mohammadi, M.E.; Wood, R.L. Deep Learning Classification of 2D Orthomosaic Images and 3D Point Clouds for Post-Event Structural Damage Assessment. Drones 2020, 4, 24.
- Preethi Latha, T.; Naga Sundari, K.; Cherukuri, S.; Prasad, M.V.V.S.V. Remote Sensing UAV/Drone Technology as A Tool For Urban Development Measures in APCRDA. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 525–529.
- Paul, A.; Nayana, P.N.; Shaji, M.P.; Joseph, M.; Lakshmipriya, K.A. UAV Aerial Imagery: Mapping & 3d Modelling. Int. J. Res. Trends Innov. 2022, 7, 656–662.
- Saifizi, M.; Azani Mustafa, W.; Syahirah Mohammad Radzi, N.; Aminudin Jamlos, M.; Zulkarnain Syed Idrus, S. UAV Based Image Acquisition Data for 3D Model Application. IOP Conf. Ser. Mater. Sci. Eng. 2020, 917, 012074.
- Duran, Z.; Ozcan, K.; Atik, M.E. Classification of Photogrammetric and Airborne LiDAR Point Clouds Using Machine Learning Algorithms. Drones 2021, 5, 104.
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147.
- Chin, K.S.H.; Siu, A.C.Y.; Ying, S.Y.K.; Zhang, Y. Da Jiang Innovation, DJI: The Future of Possible. Acad. Asian Bus. Rev. 2017, 3, 83–109.
- Zanelii, E.; Bodecker, H. Drone-Market-Analysis-2022–2030; Drone Industry Insights UG: Hamburg, Germany, 2022.
- Gallagher, K. Drones, and the Future of Urban Planning. Available online: https://www.simulyze.com/blog/drones-and-the-future-of-urban-planning (accessed on 20 February 2023).
- Jenkins, D.; Vasigh, B. The Economic Impact of Unmanned Aircraft Systems Integration in The United States. Available online: https://www.auvsi.org/our-impact/economic-report (accessed on 18 April 2023).
- Chang, J.-H.; Huynh, P. Asean In Transformation: The Future Of Jobs At Risk Of Automation; International Labour Office Organization: Geneva, Switzerland, 2016; Volume 9, ISBN 978-92-2-130965-9.
- Lutkevich, B. Drone (UAV). Available online: https://www.techtarget.com/iotagenda/definition/drone?vgnextfmt=print (accessed on 20 February 2023).
- Agapiou, A. Vegetation Extraction Using Visible-Bands from Openly Licensed Unmanned Aerial Vehicle Imagery. Drones 2020, 4, 27.
- Murray, L. E&T Engineering & Technology; IET Services: Wales, UK, 2022.
- Apvrille, L.; Roudier, Y.; Tanzi, T.J. Autonomous Drones for Disasters Management: Safety and Security Verifications. In Proceedings of the 2015 1st URSI Atlantic Radio Science Conference (URSI AT-RASC), Gran Canaria, Spain, 18–25 May 2015; pp. 1–2.
- Engel, M.; Andreas, H.; Eric, S.; Stephan, D.; Peichl, M. Recent Results of a UAV-Based Synthetic Aperture Radar for Remote Sensing Applications. In Proceedings of the 13th European Conference on Synthetic Aperture Radar, Online, 29–31 April 2021.
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62.
- Kucharczyk, M.; Hugenholtz, C.H.; Zou, X. UAV–LiDAR Accuracy in Vegetated Terrain. J. Unmanned Veh. Syst. 2018, 6, 212–234.
- Insider Intelligence Future of Drones_ Applications & Uses of Drone Technology in 2021. Available online: https://www.businessinsider.com/drone-technology-uses-applications (accessed on 20 February 2023).
- Jones, G.L. The Use Of Armed Drones By Law Enforcement: A Need For Essential Elements In Policy. Bachelor’s Thesis, Oklahoma State University, Stillwater, OK, USA, 2019.
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry Applications of UAVs in Europe: A Review. Int. J. Remote Sens. 2017, 38, 2427–2447.
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV Mission Planning Resistant to Weather Uncertainty. Sensors 2020, 20, 515.
- Gao, M.; Hugenholtz, C.H.; Fox, T.A.; Kucharczyk, M.; Barchyn, T.E.; Nesbit, P.R. Weather Constraints on Global Drone Flyability. Sci. Rep. 2021, 11, 12092.
- Jiménez López, J.; Mulero-Pázmány, M. Drones for Conservation in Protected Areas: Present and Future. Drones 2019, 3, 10.
- Duffy, J.; Anderson, K.; Shapiro, A.; Avino, F.S.; Glover-Kapfer, P. WWF Conservation Technology, Drone Technologies for Conservation. WWF 2020, 1, 124.
- CASA Drone Safety Rules for Recreational Drone Operators. Available online: https://www.casa.gov.au/sites/default/files/2021-03/transcript-drone-safety-rules-recreational-drone-operators.pdf (accessed on 8 February 2023).
- Civil Aviation Authority of Malaysia. CAAM Report for Standard Requirement for The Application of Drone Permit (Below 20kg); CAAM: UAS–02/2019; Civil Aviation Authority of Malaysia: Kuala Lumpur, Malaysia, 2019.
- Mcllrath, L. Drones: Benefits Study High Level Findings. MOT009.18.; Ministry of Transport: Wellington, New Zealand, 2019. Available online: https://www.transport.govt.nz/assets/Uploads/Report/04062019-Drone-Benefit-Study.pdf (accessed on 8 February 2023).
- Hristozov, S.; Zlateva, P. Concept Model for Drone Selection in Specific Disaster Conditions. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-3/W4, 245–249.
- Dolesh, R.J. The Drones Are Coming. Available online: https://www.nrpa.org/parks-recreation-magazine/2015/march/the-drones-are-coming/ (accessed on 21 February 2023).
More
Information
Subjects:
Remote Sensing
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.6K
Revisions:
2 times
(View History)
Update Date:
12 Jun 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No