Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Miftahur Rahman | -- | 3788 | 2023-05-31 13:30:54 | | | |
| 2 | Sirius Huang | Meta information modification | 3788 | 2023-06-02 09:48:37 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Rahman, M.; Liu, H.; Cardenas, I.D.; Starr, A.; Hall, A.; Anderson, R. Technologies for Railway Track Maintenance. Encyclopedia. Available online: https://encyclopedia.pub/entry/45057 (accessed on 03 August 2026).
Rahman M, Liu H, Cardenas ID, Starr A, Hall A, Anderson R. Technologies for Railway Track Maintenance. Encyclopedia. Available at: https://encyclopedia.pub/entry/45057. Accessed August 03, 2026.
Rahman, Miftahur, Haochen Liu, Isidro Durazo Cardenas, Andrew Starr, Amanda Hall, Robert Anderson. "Technologies for Railway Track Maintenance" Encyclopedia, https://encyclopedia.pub/entry/45057 (accessed August 03, 2026).
Rahman, M., Liu, H., Cardenas, I.D., Starr, A., Hall, A., & Anderson, R. (2023, May 31). Technologies for Railway Track Maintenance. In Encyclopedia. https://encyclopedia.pub/entry/45057
Rahman, Miftahur, et al. "Technologies for Railway Track Maintenance." Encyclopedia. Web. 31 May, 2023.
Copy Citation
Inspection and repair interventions play vital roles in the asset management of railways. Autonomous mobile manipulators possess considerable potential to replace humans in many hazardous railway track maintenance tasks with high efficiency and increased asset utilization. Railway track maintenance technologies ranges from handheld devices to whole train, from manually pushed trolley to autonomous robots.
railway track maintenance
robotic maintenance technology
autonomous systems
mobile manipulator
1. Introduction
Railway infrastructure networks are among the most important transportation assets and have served the worldwide growth of industry and civilization for hundreds of years. The notion of asset management within a railway infrastructure context is developing to fulfil the needs of both users and owners for sustainable railway management. The railway infrastructure network can include vast numbers of tracks, bridges, tunnels, stations, trackside markers, overhead electric lines, etc. For example, the British railway network has approximately 20,000 miles of track, 30,000 bridges, and 2500 stations, some of which are almost 200 years old, as well as a plethora of signalling, electrification, and crossing systems that are geographically spread out [1]. Railway infrastructure operators are responsible for planning, controlling, and maintaining all asset-related hardware operations and maintenance. Railway track inspection and repair are fundamental requirements for ensuring safe transit and long-term growth [2]. The quality of the railway track also impacts both the reliability of pantograph–catenary interactions [3] and ride comforts [4]. Railways maintenance or repair tasks have primarily relied on human interventions for decades. Although many modern tools and machines have been introduced recently, human involvement is still essential. Currently, over 40,000 people are working in Britain to maintain the appropriate operation of infrastructures (e.g., signals and power supplies) and assets (e.g., tracks and bridges) [5].
Train services are considered among the safer, greener, and most reliable public transport systems. Construction of new railway infrastructure is time-consuming and costly. For example, the construction cost of the High Speed 2 (HS2) railway line of 330 miles may rise to more than GBP 100 billion [6]. Moreover, the construction cost per km of railway track is 12.5 to 30 times higher than per km per lane road [7]. Modern asset management systems ensure the life cycle of well-maintained railway assets, producing environmental and financial benefits by balancing maintenance, renewal, and enhancement activities [8]. Thus, governments and stakeholders strive to maximize the availability of railway networks by introducing enhanced asset management systems, including AI-based robotics [2]. As a result, there is avid demand for flexible and autonomous robots that can perform maintenance tasks effectively and which possess remote, reliable communication and sensing technology. Maintaining adequate track quality ensures a safe and comfortable journey for passengers and timely freight delivery. Railway maintenance tasks demand dexterity, quality, versatility, and speed. Some tasks can be repetitive and need to be performed out of hours or in adverse weather conditions.
2. Current Technologies for Railway Track Maintenance
Railway asset maintenance systems range in size from carriages to hand-held devices. These can be stationary or movable. Fixed maintenance assets are usually positioned along the railway infrastructure network at crucial locations. They record information, such as passing train information, and monitor track components. On the other hand, movable devices are designed to run along the railway track in order to perform specific tasks at a certain speed. In some cases, the movable platform can be airborne, such as an unmanned aerial vehicle (UAV) or a helicopter. Table 1 shows the advantages and disadvantages of several devices for use in railway track maintenance. These devices are equipped with various types of sensors for navigation, monitoring, surveying, and inspection. Common inspection methods used so far include visual inspection, digital image correlation (DIC) [9] and thermal cameras [10] for rail component inspection, laser vision sensors [11] for rail wear and track geometry assessments, laser distance meters [12] for rail corrugation, ultrasonic sensors [13] for surface and internal defect determination, light detection and ranging (LiDAR) [14] for track clearance and vegetation detection, eddy currents [15] for internal rail defect inspection, electromagnetic acoustic transducers (EMAT) [16] for surface and internal defect analysis, ground-penetrating radar (GPR) [17] for ballast fouling and moisture assessment, interferometric synthetic aperture radar (InSAR) [18] for track settlement, etc.
Table 1. Type of track maintenance devices and systems used in railway.
| Type | Main Tasks | Advantages | Disadvantages |
|---|---|---|---|
| Push trolley | Track inspection, carry material | Smaller in size, easy to transport | Slow speed, human-operated |
| Road-Rail Vehicle (RRV) | Repair, transport material, inspection |
High speed, easy to transport | Costly, human-operated |
| Specialist trains | Repair and inspection of track | High speed and payload, multiple measurements | Very costly to operate |
| Train-borne system | Track inspection, track repair | Moderate cost, easy to install | Limited validation |
2.1. Push-Trolley
Inspection trolleys used in railway maintenance are capable of on-track navigation because of their rail-shaped wheels. The size of the trolley used depends on the payload requirements. They can be used for different purposes, whether carrying materials for maintenance or carrying people. Depending on their size and design, these simple trolleys can carry up to 60 kg of material [19].
Inspection trolleys are typically trimmed to reduce mass and increase sensor payload capability. They are ideal for use in ultrasonic inspection systems because of their slower operating speed. Moreover, they are widely used for track geometry validation on short track lengths [20]. GPS capability provides the defect location [21]. However, as humans typically push these devices, their maximum speed is limited, and they are only suitable for use over short distances. Figure 1 is an example of a track geometry inspection trolley. The disadvantage of using a push-trolley for smart maintenance is that it can only carry a limited payload before it becomes cumbersome. Moreover, it lacks the capability for payload deployment.

2.2. Road–Rail Vehicle
Road–rail vehicles (RRV) are a unique type of maintenance equipment with both pneumatic and retractable rail wheels, as shown in Figure 2. These multipurpose maintenance machines can be used for transporting material or persons or as an inspection device with a proper sensor attachment. The Rail Industry Safety and Standards Board (RISSB) classifies RRVs into three main categories based on power transmission mechanism: self-powered, friction drive and direct drive RRVs [22]. Moreover, braking power, safety procedures during road–rail conversion and seating arrangements are also standardized by the Rail Safety and Standard Board (RSSB) to reduce accidents and maintain safety [23].

High-load-carrying RRVs are usually used for repair or construction tasks, while smaller RRVs are used for inspection. For example, Unimog, shown in Figure 2a, from Mercedes-Benz [24] can tow up to 1000 t, and has served the railway industry for a long time. A range of instruments can be installed in to the RRVs to convert them into a mobile asset management platform for surveying and inspecting the railway environment to assess the condition of road–rail access points, vegetation, and track infrastructure. Figure 2b shows a mobile asset management platform which can provide LiDAR point cloud and images at a maximum speed of 20 mph [25]. RRVs are much faster than manual inspection trolleys and can carry more weight, as demonstrated by Runner Wizard V2R [26]. The localization of defects and payload deployment are still challenging and control of RRVs remains in the hand of a human operator.
2.3. Train-Borne System
Train-borne systems are convenient for assessing the geometrical or structural properties of railways or for performing remote condition monitoring. These can be adapted to train vehicles and do not need separate power sources. They are economically viable and can be more efficient than the conventional track inspection method [27]. For example, machines with vision have been used to develop a train-borne track condition monitoring system based on computer vision and condition monitoring sensors for preventive maintenance [28]. With easy-to-fit hardware, this system is capable of millimetre-level accuracy and real-time data communications and processing software. Another example of a train-borne system is the RILA system from Furgo [29]. This is a remote train-mounted system combining laser scanners, computer vision, and GPS to perform unmanned remote track surveys. These systems provide significant advantages for inspection as they are easy to install on a running passenger or a freight train. However, the lack of actuation capability is the most significant disadvantage of these systems.
2.4. Specialist Train
The inspection and monitoring of vast railway networks require faster inspection methods and specialist trains. Equipped with a variety of sensors, these trains can finish inspection tasks quickly and carry repair crews and materials. The new measurement train (NMT) [30] and mobile maintenance train (MMT) [31] are two state-of-the-art specialist trains, used in the UK for track inspection and repair, as shown in Figure 3.

NMT, shown in Figure 3a, is fitted with multiple cameras, laser sensors, transducers, and accelerometers [30]. Plain line pattern recognition (PLPR) methods [32] can detect anomalies with the camera at a top speed of 125 mph, while the transducers and accelerometers can record the track geometry. This model generates and records almost 10 terabytes of data on an onboard computer for every 440 miles. On the other hand, MMT, shown in Figure 3b, is a specially designed and equipped train for track maintenance tasks and has been described as a “workshop on wheels,” providing a workplace which is from the sun, rain, and trains in operation [31]. Based on their design, attached sensors, and actuation systems, specialist trains can perform inspections at a higher speed or can perform some repair tasks. However, these specialist trains require human involvement, are costlier to run, and reduce track possession while in operation.
3. Robotic Technologies Used in Railway Track Inspection and Maintenance
Due to their efficiency and safety reasons, robotic technologies are being gradually adopted by the railway industry [33]. Though railway track is one of the most critical infrastructures in railway, most RASs are developed for rolling stock maintenance. This section will report on the state-of-the-art robotic inspection technologies for railway tracks, tunnels, and bridges to show the trend of past research and the future need for research into robotic maintenance technologies for railway tracks.
3.1. Robotic Inspection Technologies in Railway
3.1.1. Track Inspection
Railway track constantly degrades with use. It is subject to the enormous stresses of the lateral and longitudinal forces from trains [34]. Environmental conditions such as heavy rain, extreme cold, snow, scorching heat, etc., accelerate degradation. The first significant study on the use of robotic technology for track maintenance was carried out by Trivedi et al. The project, SysTem for Autonomous Railway TRACK operations (STAR-TRACK), aimed to studying the feasibility of using robots in track maintenance and developing a multi-robot autonomous track maintenance system for the high-speed Shinkansen line to perform two specific tasks; loosening bolts after detection and assembling new fasteners automatically [35]. Other attempts have been made to address different tasks, such as railroad crossing inspection [36], faulty rail profile detection [37], crack detection [38], etc. Table 2 shows a summary of different track inspection robots.
Table 2. Track inspection robots.
| Type | Main Function | Sensing Method | Key Technology and Contribution |
|---|---|---|---|
| STAR-TRACK [35] | Fastener maintenance | Monocular camera | Multi-robot autonomous track maintenance |
| Train-borne system [39] | Fastener inspection | TV camera | Neural classifier for fastener detection |
| Train-borne system [40] | Fastener detection | Video camera | Artificial lighting source to reduce ambiance noise |
| Visual inspection system for railway (VISyR) [41] | Fastener detection | Camera | Computer vision and machine learning, a maximum speed of 200 km/h |
| Train-borne system [42] | Fastener detection | Camera | Machine learning, structured lighting condition |
| Manual trolley [43] | Turn out and tie detection | Multiple cameras | Slow speed, a machine learning algorithm |
| RRV [44] | Track inspection | Four cameras, GPS | Defect location based on GPS |
| Train-borne system [45] | Fastener detection | CCD camera, GPS | Machine learning for detection and GPS for location information |
| Comprehensive track inspection vehicle (CTIV) [46] | Fastener detection | Camera | Fastener quality based on image and machine learning algorithm |
| Modified truck with sensor [36] | Railroad crossing inspection | Camera, LiDAR | Pattern recognition, 3D point cloud using support vector machine (SVM) |
| Diagnostic analysis for railways and trams (DART) [47] | Track geometry | Track measurement | Computer-assisted diagnostic tool |
| Hand-pushed inspection device [37] | Faulty rail profile detection | Multiple laser camera | 3D modeling, deep learning model for fault detection |
| Railpod [48] | Track inspection | Customizable based on requirements | Easy to transport, both rail and pneumatic wheel |
| Robot trolley with sensors [49] | Fatigue cracks on track | Alternating current field measurement (ACFM) | Automatic crack detection robot |
| AutoScan [38] | Crack detection on track | Electromagnetic acoustic transducer (EMAT) | Manipulator for inspection |
| RIIS1005 [11] | Multiple track defects | Camera, LiDAR | Easy-to-assemble and -disassemble, pattern recognition, deep learning |
| Felix [50] | Switches and crossings (S&C) | laser | Artificial vision system, wireless data transfer |
Fasteners fix the rails to the sleepers. If fasteners are missing, the stiffness of the track is reduced. A computer vision-based approach, based on wavelet transform (WT) and principal component analysis (PCA), was developed by Mazzeo et al. to detect the absence of fasteners [39] using a camera, which increased detection reliability than manual inspection. Another computer vision-based missing clip detection technique was developed by Singh et al. using a video camera and an artificial lighting source to eliminate the inconsistent illumination effect in image processing [40]. Marino et al. presented a visual inspection system for railways (VISyR) to determine the presence of fasteners using computer vision and machine learning at a maximum speed of 200 km/h [41]. Another machine learning-based fastener inspection method was proposed by Zhang et al., who combined unstructured and structured lighting conditions to reduce the impact of light, vibration, and obstacles [42]. This proposed method was more reliable in practical conditions as its training dataset was robust.
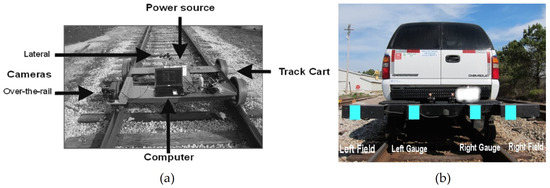
A conceptual hand-pushed cart with computer vision and a machine learning algorithm was developed for turnout detection and tie detection [43], as shown in Figure 4a. Li et al. proposed another vision-based track component inspection system that could detect multiple components using 4 cameras with geo-location from onboard GPS, as shown in Figure 4b [44]. Wang et al. also used machine learning and computer vision for missing fastener detection with a high-speed charge-coupled device (CCD) camera [45]. Gibert et al. proposed a machine learning approach based on histograms of oriented gradients (HOG) and trained the model using images collected from the comprehensive track inspection vehicle (CTIV), which could detect missing clips and classify existing clips into different categories [46].
Track geometry parameters describe the quality of the track and issues that might need repair interventions. The diagnostic analysis of railways and trams (DART) was able to point out the weak location of railway tracks by calculating and measuring multiple geometrical components using a laser scanner [47]. Later, those degraded or deteriorated track locations for potential future defects were further inspected by a human. Using multiple laser cameras, Santur et al. created 3D modeling of the rail track in order to train it and thus identify defects [37].
In recent years, multiple state-of-the-art robotic solutions have been developed for track inspection, as shown in Figure 5, which are easy to transport and reduce human involvement. Railpod, shown in Figure 5a, is an inspection platform that can perform autonomous navigation along the track or can be controlled by remote operation. Because of having both the pneumatic and rail wheels, it can be easily transported along the road [48]. Rowshandel et al. proposed a system consisting of a commercially available alternating current field measurement (ACFM) sensor attached to a trolley and a robot for detecting rolling contact fatigue cracks in rails [49], as shown in Figure 5b.

AutoScan, a project from Horizon 2020, is another example of an autonomous robotic inspection platform with a manipulator for close inspection, shown in Figure 5c. Initially, rolling contact fatigue (RCF) or electromagnetic acoustic transducer (EMAT) sensors are used to find the defect [38]. Then, the operator can use the manipulator to perform further inspection by standing on the side of the rail. RIIS1005 is another intelligent track inspection robot developed by Shenhao Technology, as shown in Figure 5d [11]. The combination of deep learning, pattern recognition, and feature-matching algorithms can detect multiple defects on rail surfaces, fasteners, ties, etc. Finally, Felix, shown in Figure 5e, an automated inspection kart developed by Loccioni, was designed to inspect the switches and crossings (S&C) and track with a maximum operational speed of 5 km/h [50].
3.1.2. Tunnel and Bridge Inspection
Tunnels and bridges are essential components of the infrastructure of the railway network. The inspection of bridges poses fatal risks for the operator from ergonomics and workplace perspectives. Tunnels are usually dark and enclosed, lacking a cellular signal or GPS. Apart from the track inspection in the bridge and tunnel, a particular inspection method is required to inspect structural integrity.
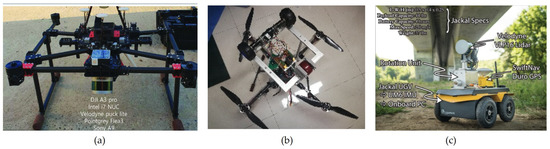
An unmanned aerial vehicle (UAV) can navigate in remote places both with and without the help of a human. Jung et al. proposed a framework for autonomous bridge inspection using a UAV equipped with LiDAR, GPS, IMU, and a camera [51], as shown in Figure 6a. Initially, a map of the test area was created with the help of a human operator, and then the UAV localized and navigated between different waypoints on a predefined map and acquired inspection data which were processed later. Wang et al. also demonstrated automatic data acquisition for bridge bottom inspection using a tethered UAV [52], which is shown in Figure 6b. Phillips et al. developed an autonomous bridge bottom inspection robot with an unmanned ground vehicle (UGV) [53], as shown in Figure 6c.
Liu et al. designed a prototype of a steel bridge inspection robot, a combination of a rail kart and a manipulator, to discover research challenges [54]. Next, Rui Wang and Youhei Kawamura designed and experimented with a robot with a magnetic wheel for steel bridge inspection. Magnetic wheels provide two advantages: they can climb vertical steel structures and create magnetic fields for sensing [55]. A specially designed robotic system with a guide rail was proposed, which came with a user interface for controlling it from a long distance [56].
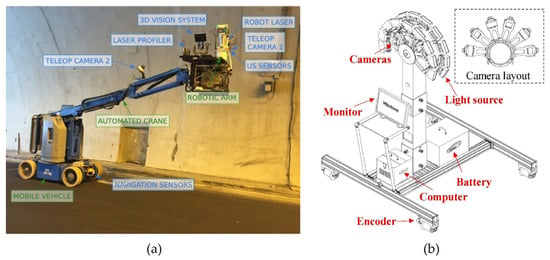
Cracks are common in tunnel walls. Zhang et al. presented tunnel wall surface crack detection and classification techniques based on a camera [57]. A semi-supervised computer vision-based robotic system, named ROBO-SPECT, with multiple degree-of-freedom was designed by Menendez et al. for use on a road tunnel [33]. As shown in Figure 7a, with the help of a robotic arm, the robot was able to inspect the crack on the surface wall with an ultrasonic sensor. Huang et al. used deep learning-based semantic segmentation of images to detect cracks on the surface [58]. Moving tunnel inspection (MTI-200a), shown in Figure 7b, was used to acquire data which were later analysed using a deep learning algorithm.
3.2. Robotic Repair Technology in Railway
Inspections are important in railway asset management to verify the integrity of assets and to prevent catastrophic failures. For example, in the UK, once a defect is detected on the track, details of the defect are recorded in track geometry reports (TGR). Based on the standards of Network Rail Limited (NR-L2-TRK-001-MOD11), infrastructure maintenance engineers (IMEs) and track maintenance engineers (TME) categorize the defects as immediate action-level (IAL), intervention-level (IL), and alert-level (AL) faults [60]. Both IAL and IL defects require repair without delay, while AL defects can be scheduled. Repair tasks in railways vary, including bolt or clip removing or fastening, grinding rail surface, welding, removing obstacles, demolishing trackside vegetation, fixing overhead electric lines, cleaning snow or leaf from the track, cleaning rolling stock, repairing rolling stock, etc. Most repairs involve humans and specially designed tools and machines. Moreover, adverse weather conditions and out-of-hours work can create hazardous conditions. Some tasks are physically demanding, involving heavy loads that result in the fatiguing of railway workers, posing a risk to their health and safety. Although robots are used in many inspection tasks around the railway network, they are rarely used in any repair task. This section will summarize all the repair robot-related literature, despite focusing only on the track. Even after scrutinizing the literature rigorously, very few examples of repair robots have been found; those discovered are mostly used in cleaning tasks and are related to the repair task of rolling stock.
The first attempt to determine the usability of robots in repair tasks was carried out in 1987. After considering 24 technically viable processes in locomotive rebuilding, the researchers concluded that most of the processes were neither economically beneficial nor productive [61]. Just 2 years later, carrying out a separate study in Toronto Subway, Wiercienski and Leek assessed that robots are economically and technologically advantageous for cleaning rolling stock [62].
Four types of cleaning robots were introduced by the East Japan Railway to tackle the problem posed by the lack of cleaning staff. Among the 4 types of self-propelled cleaning robots, 2 types were for stations, and 2 types were for rolling stock, including dust-collector or sweeper types and floor cleaning or scrubber types [63]. Those robots were equipped with ultrasonic sensors and laser sensors for navigation and obstacle avoidance. Xu et al. designed and demonstrated a self-traction model for cleaning the vehicles used for urban mass transit in China. The robot was designed with a mobile platform and a manipulator to save energy and water. Apart from the path planning and control algorithm, the researchers also developed an efficient energy and water management algorithm [64]. Tomiyama et al. discussed the requirements and conceptual design of a rolling stock front cleaning robot [65], and a prototype was built to analyse the cleaning time and force applied at the cleaning head [66].
Apart from cleaning, robots are also used for cutting, welding, grinding, or material handling. Vale, a mining company in Brazil, developed a robot to repair the rail cars used for the mining operation. As shown in Figure 8, the system had multiple manipulators capable of cutting and welding carbon steel [67]. The wheelset of rolling stock, a combination of 2 wheels with a shaft, is very heavy and requires expertise for repair. NSH USA, formerly known as the SIMMONS Machine Tool Corporation, utilized a robot and overhead cranes to altogether remove the human involvement in transporting wheel sets in different workshop locations [68].

Figure 8. Robot used for repairing rail cars in mining operations [67].
A novel technology has been developed in Britain for in situ rail defect repair which is both cost-effective and semi-automated. The discrete defect repair (DDR) process removes the defective part of the rail head and then repairs the defective rail using semi-automatic arc welding [69]. Finally, a milling tool was used in grinding the rail profile, and quality has been ensured with an automatic inspection process. Figure 9a shows the railhead repair machine, while Figure 9b–d show the intermediate process of DDR technology, respectively.
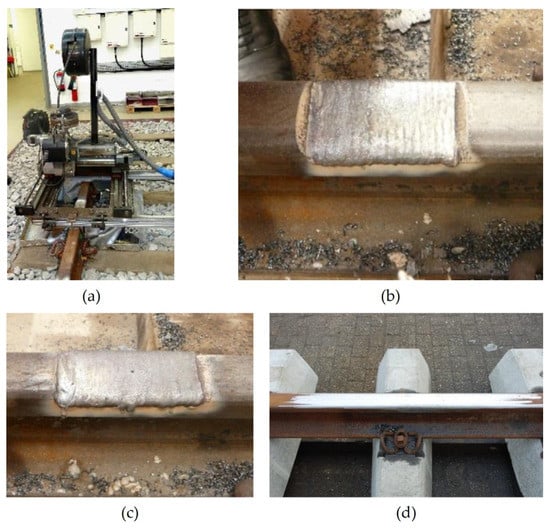
Figure 9. DDR technology [69]: (a) the machine; (b) cavity created after removing defected rail head; (c) the rail head after arc welding; (d) final repaired railhead.
References
- Giordano, V. Robotic Non-Contact Rail Inspection Feasibility Study. Masters’s Thesis, Cranfield University, Bedford, UK, 2018.
- Intelligent Innovative Smart Maintenance of Assets by IntegRated Technologies|IN2SMART Project|Fact Sheet|H2020|CORDIS|European Commission. Available online: https://cordis.europa.eu/project/id/730569 (accessed on 23 May 2022).
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A Spatial Coupling Model to Study Dynamic Performance of Pantograph-Catenary with Vehicle-Track Excitation. Mech. Syst. Signal Process. 2021, 151, 107336.
- Azzoug, A.; Kaewunruen, S. RideComfort: A Development of Crowdsourcing Smartphones in Measuring Train Ride Quality. Front. Built Environ. 2017, 3, 3.
- Vithanage, R.; Harrison, C.; DeSilva, A. Importance and Applications of Robotic and Autonomous Systems (RAS) in Railway Maintenance Sector: A Review. Computers 2019, 8, 56.
- HS2 Costs Could Rise to £106bn, Government Review Says 2020. Available online: https://www.therailwayhub.co.uk/9839/hs2-costs-could-rise-to-106bn-government-review-says/ (accessed on 10 February 2023).
- Transport-Watch. Capital for Track 2008; Transport-Watch: Northampton, UK, 2008.
- Landgraf, M.; Enzi, M. Smart Data for a Pro-Active Railway Asset Management. In Proceedings of the 7th Transport Research Arena TRA 2018, Vienna, Austria, 16–19 April 2018.
- Chen, G.; Liang, Q.; Zhong, W.; Gao, X.; Cui, F. Homography-Based Measurement of Bridge Vibration Using UAV and DIC Method. Measurement 2021, 170, 108683.
- Stypułkowski, K.; Gołda, P.; Lewczuk, K.; Tomaszewska, J. Monitoring System for Railway Infrastructure Elements Based on Thermal Imaging Analysis. Sensors 2021, 21, 3819.
- Railway-News Railway Inspection Robot Takes on Maintenance Challenges. Available online: https://railway-news.com/railway-inspection-robot-takes-on-maintenance-challenges/ (accessed on 3 November 2022).
- Hisa, T.; Kanaya, M.; Sakai, M.; Hamaoka, K. Rail and Contact Line Inspection Technology for Safe and Reliable Railway Traffic. Hitachi Rev. 2012, 61, 325.
- Ganesh, V.; Mm, M. Automotive Crack Detection for Railway Track Using Ultrasonic Sensorz. Int. J. Eng. Technol. Comput. Res. (IJETCR) 2016, 4, 34–37.
- Li, Z.; He, Q. Predicting Failure Times of Railcar Wheels and Trucks by Using Wayside Detector Signals. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1113–1118.
- Rajamäki, J.; Vippola, M.; Nurmikolu, A.; Viitala, T. Limitations of Eddy Current Inspection in Railway Rail Evaluation. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 121–129.
- A New Electromagnetic Acoustic Transducer (EMAT) Design for Operation on Rail—ScienceDirect. Available online: https://www.sciencedirect.com/science/article/pii/S0963869514000413?via%3Dihub (accessed on 13 February 2023).
- Wang, H.; Silvast, M.; Markine, V.; Wiljanen, B. Analysis of the Dynamic Wheel Loads in Railway Transition Zones Considering the Moisture Condition of the Ballast and Subballast. Appl. Sci. 2017, 7, 1208.
- Wang, H.; Chang, L.; Markine, V. Structural Health Monitoring of Railway Transition Zones Using Satellite Radar Data. Sensors 2018, 18, 413.
- Trolleys & Vehicles Archives. Available online: https://permaquip.co.uk/shop/product-category/trolleys-vehicles/ (accessed on 28 October 2022).
- Majstorović, I.; Ahac, M.; Lakusic, S. Track Gauge Monitoring Scope Optimization on Small Urban Railway Systems. In Proceedings of the 6th International Conference on Road and Rail Infrastructure CETRA 2020, Zagreb, Croatia, 20–21 May 2020.
- Track Geometry Trolley. Available online: https://www.pandrol.com/product/track-geometry-trolley/ (accessed on 28 October 2022).
- AS 7502:2016; Road Rail Vahicles. Rail Industry Safety and Standard Board: Brisbane, QLD, Australia, 2016.
- RIS-1530-PLT; Rail Industry Standard for Engineering Acceptance of On-Track Plant and Associated Equipment. RSSB: London, UK, 2014.
- Unimog U 219—U 535: Road-Rail—Mercedes-Benz Trucks—Trucks You Can Trust. Available online: https://www.mercedes-benz-trucks.com/en_GB/models/unimog-implement-carrier/applications/road-rail.html (accessed on 28 October 2022).
- Asset Management & Scanning—Aquarius Railroad Technologies. Available online: https://www.aquariusrail.com/products/scan-r2r4x4/ (accessed on 12 January 2023).
- Inspection & Transport Road-Rail Vehicle Runner Wizard—V2R. Available online: https://geismar.com/products/inspection-transport-road-rail-vehicle-v2r-runner-wizard/?lang=en (accessed on 28 October 2022).
- Yang, Y.B.; Wang, Z.-L.; Shi, K.; Xu, H.; Wu, Y.T. State-of-the-Art of Vehicle-Based Methods for Detecting Various Properties of Highway Bridges and Railway Tracks. Int. J. Struct. Stab. Dyn. 2020, 20, 1793–6764.
- Our Solution. Available online: https://www.machineswithvision.com/oursolution (accessed on 31 October 2022).
- RILA® 3.0. Available online: https://www.fugro.com/about-fugro/our-expertise/innovations/rila (accessed on 31 October 2022).
- New Measurement Train (NMT)—Network Rail. Available online: https://www.networkrail.co.uk/running-the-railway/looking-after-the-railway/our-fleet-machines-and-vehicles/new-measurement-train-nmt/ (accessed on 17 June 2020).
- Britain’s First ‘Workshop on Wheels’ Set to Revolutionise Railway Maintenance. Available online: https://www.networkrailmediacentre.co.uk/news/britains-first-workshop-on-wheels-set-to-revolutionise-railway-maintenance (accessed on 24 May 2022).
- Erridge, C. How Cutting-Edge Track Technology Is Reducing Delays for Passengers. Available online: https://www.networkrail.co.uk/stories/how-cutting-edge-track-technology-is-reducing-delays-for-passengers/ (accessed on 13 February 2023).
- Menendez, E.; Victores, J.G.; Montero, R.; Martínez, S.; Balaguer, C. Tunnel Structural Inspection and Assessment Using an Autonomous Robotic System. Autom. Constr. 2018, 87, 117–126.
- Yucel, M.; Ozturk, N. Real-Time Monitoring of Railroad Track Tension Using a Fiber Bragg Grating-Based Strain Sensor. Instrum. Sci. Technol. 2017, 46, 519–533.
- Trivedi, M.M.; Ng, K.C.; Lassiter, N.; Capella, R. New Generation of Multirobot Systems. In Proceedings of the SMC’98 Conference Proceedings, 1998 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.98CH36218), San Diego, CA, USA, 14 October 1998; IEEE: San Diego, CA, USA, 1998; Volume 4, pp. 3342–3346.
- Ranganathan, P.; Olson, E. Automated Safety Inspection of Grade Crossings. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 2149–2154.
- Santur, Y.; Karakose, M.; Akin, E. A New Rail Inspection Method Based on Deep Learning Using Laser Cameras. In Proceedings of the 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–6.
- AutoScan—Rail Inspection by Autonomous Systems. Available online: https://cordis.europa.eu/project/id/720506 (accessed on 25 September 2022).
- Mazzeo, P.L.; Nitti, M.; Stella, E.; Distante, A. Visual Recognition of Fastening Bolts for Railroad Maintenance. Pattern Recognit. Lett. 2004, 25, 669–677.
- Singh, M.; Singh, S.; Jaiswal, J.; Hempshall, J. Autonomous Rail Track Inspection Using Vision Based System. In Proceedings of the 2006 IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety, Alexandria, VI, USA, 16–17 October 2006; pp. 56–59.
- Marino, F.; Distante, A.; Mazzeo, P.L.; Stella, E. A Real-Time Visual Inspection System for Railway Maintenance: Automatic Hexagonal-Headed Bolts Detection. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 418–428.
- Zhang, H.; Yang, J.; Tao, W.; Zhao, H. Vision Method of Inspecting Missing Fastening Components in High-Speed Railway. Appl. Opt. 2011, 50, 3658–3665.
- Resendiz, E.; Hart, J.M.; Ahuja, N. Automated Visual Inspection of Railroad Tracks. IEEE Trans. Intell. Transp. Syst. 2013, 14, 751–760.
- Li, Y.; Trinh, H.; Haas, N.; Otto, C.; Pankanti, S. Rail Component Detection, Optimization, and Assessment for Automatic Rail Track Inspection. IEEE Trans. Intell. Transp. Syst. 2014, 15, 760–770.
- Wang, L.; Zhang, B.; Wu, J.; Xu, H.; Chen, X.; Na, W. Computer Vision System for Detecting the Loss of Rail Fastening Nuts Based on Kernel Two-Dimensional Principal Component—Two-Dimensional Principal Component Analysis and a Support Vector Machine. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2016, 230, 1842–1850.
- Gibert, X.; Patel, V.M.; Chellappa, R. Robust Fastener Detection for Autonomous Visual Railway Track Inspection. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 5–9 January 2015; pp. 694–701.
- Madejski, J. Autonomous Track Geometry Diagnostics System. J. Mater. Process. Technol. 2004, 157–158, 194–202.
- Our Platform—RailPod, Inc. Available online: https://rail-pod.com/?page_id=2527 (accessed on 25 December 2022).
- Rowshandel, H.; Nicholson, G.L.; Davis, C.L.; Roberts, C. An Integrated Robotic System for Automatic Detection and Characterisation of Rolling Contact Fatigue Cracks in Rails Using an Alternating Current Field Measurement Sensor. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2013, 227, 310–321.
- Mobile Robotic Inspection for Railway Infrastructures. Available online: https://www.loccioni.com/en/railway/ (accessed on 3 November 2022).
- Jung, S.; Song, S.; Kim, S.; Park, J.; Her, J.; Roh, K.; Myung, H. Toward Autonomous Bridge Inspection: A Framework and Experimental Results. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; pp. 208–211.
- Wang, H.-F.; Zhai, L.; Huang, H.; Guan, L.-M.; Mu, K.-N.; Wang, G. Measurement for Cracks at the Bottom of Bridges Based on Tethered Creeping Unmanned Aerial Vehicle. Autom. Constr. 2020, 119, 103330.
- Phillips, S.; Narasimhan, S. Automating Data Collection for Robotic Bridge Inspections. J. Bridge Eng. 2019, 24, 04019075.
- Liu, D.; Dissayanake, G.; Manamperi, P.; Brooks, P.; Paul, G.; Webb, S.; Kirchner, N.; Chotiprayanakul, P.; Kwok, N.; Ren, T. A Robotic System for Steel Bridge Maintenance: Research Challenges and System Design. In Proceedings of the 2008 Australasian Conference on Robotics and Automation, ACRA 2008, Canberra, Australia, 3–5 December 2008.
- Wang, R.; Kawamura, Y. A Magnetic Climbing Robot for Steel Bridge Inspection. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3303–3308.
- Oh, J.-K.; Lee, A.-Y.; Oh, S.M.; Choi, Y.; Yi, B.-J.; Yang, H.W. Design and Control of Bridge Inspection Robot System. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 3634–3639.
- Zhang, W.; Zhang, Z.; Qi, D.; Liu, Y. Automatic Crack Detection and Classification Method for Subway Tunnel Safety Monitoring. Sensors 2014, 14, 19307–19328.
- Huang, H.; Li, Q.; Zhang, D. Deep Learning Based Image Recognition for Crack and Leakage Defects of Metro Shield Tunnel. Tunn. Undergr. Space Technol. 2018, 77, 166–176.
- The Mobile Robots at LAAS. Available online: https://homepages.laas.fr/matthieu/robots/h2bis.shtml (accessed on 16 November 2022).
- NR-L2-TRK-001-MOD11; Track Geometry—Inspections and Minimum Actions. Network Rail Standard, Network Rail: London, UK, 2015.
- Martland, C.D. Analysis of the Potential Impacts of Automation and Robotics on Locomotive Rebuilding. IEEE Trans. Eng. Manag. 1987, EM-34, 92–100.
- Wiercienski, W.; Leek, A.R. Feasibility of Robotic Cleaning of the Undersides of Toronto Subway Cars. In Proceedings of the IEEE 39th Vehicular Technology Conference, San Francisco, CA, USA, 1–3 May 1989; Volume 2, pp. 884–887.
- Yaguchi, H. Robot Introduction to Cleaning Work in the East Japan Railway Company. Adv. Robot. 1995, 10, 403–414.
- Xu, H.; Xue, K.; Yu, S.; Gao, X.; Qing, C.; Wei, R. Control for an Innovative Robotics Platform of Rinsing System for Vehicles of Urban Mass Transit. In Proceedings of the 2007 IEEE International Conference on Mechatronics, Kumamoto, Japan, 8–10 May 2007; pp. 1–6.
- Tomiyama, T.; García, L.R.; Kršlin, A.; Taykaldiranian, G. Systems and Conceptual Design of a Train Cab Front Cleaning Robot. Procedia CIRP 2017, 59, 61–66.
- García, L.R. Conceptual Design of Cab Front Robotic Cleaner; Cranfield University: Bedford, UK, 2016.
- Robot in the Maintenance of Cars. Available online: http://www.vale.com/brasil/EN/aboutvale/news/Pages/robos-manutencao-vagoes.aspx (accessed on 4 November 2022).
- Railway Wheel Set Maintenance, Production. Available online: https://nsh-usa.com/ (accessed on 4 November 2022).
- Jaiswal, J.; Smith, S.F.; Cox, R.; Kabo, E. Repair of Discrete Rail Head Defect—A Novel Technology. Collect. Open Conf. Res. Transp. 2018, 2018, 1005.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
3.5K
Revisions:
2 times
(View History)
Update Date:
02 Jun 2023
Table of Contents



Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No