Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Kunle Oguntoye | -- | 2370 | 2023-05-16 22:06:32 | | | |
| 2 | Jason Zhu | -4 word(s) | 2366 | 2023-05-17 03:38:53 | | | | |
| 3 | Sirius Huang | Meta information modification | 2366 | 2023-05-18 11:08:23 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Oguntoye, K.S.; Laflamme, S.; Sturgill, R.; Eisenmann, D.J. AI Applications for Virtual Sensing of Underground Utilities. Encyclopedia. Available online: https://encyclopedia.pub/entry/44400 (accessed on 23 July 2026).
Oguntoye KS, Laflamme S, Sturgill R, Eisenmann DJ. AI Applications for Virtual Sensing of Underground Utilities. Encyclopedia. Available at: https://encyclopedia.pub/entry/44400. Accessed July 23, 2026.
Oguntoye, Kunle S., Simon Laflamme, Roy Sturgill, David J. Eisenmann. "AI Applications for Virtual Sensing of Underground Utilities" Encyclopedia, https://encyclopedia.pub/entry/44400 (accessed July 23, 2026).
Oguntoye, K.S., Laflamme, S., Sturgill, R., & Eisenmann, D.J. (2023, May 16). AI Applications for Virtual Sensing of Underground Utilities. In Encyclopedia. https://encyclopedia.pub/entry/44400
Oguntoye, Kunle S., et al. "AI Applications for Virtual Sensing of Underground Utilities." Encyclopedia. Web. 16 May, 2023.
Copy Citation
Accurately identifying the location and depth of buried utility assets became a considerable challenge in the construction industry, for which accidental strikes can cause important economic losses and safety concerns. While the collection of as-built utility locations is becoming more accurate, there still exists an important need to be capable of accurately detecting buried utilities in order to eliminate risks associated with digging. With advances in artificial intelligence (AI), an opportunity arose in conducting virtual sensing of buried utilities by combining robotics (e.g., drones), knowledge, and logic.
artificial intelligence
virtual sensing
underground utilities
buried utilities
data fusion
knowledge database
1. Aerial Mapping
Aerial mapping (AM) of mapping underground utility typically consists of locating aboveground utility appurtenances to infer the likelihood of buried utility based on the utility flow of operations and industry rules. AM techniques are known to be cost-effective and non-intrusive [1]. AI in applications to AM is typically used as either (1) a computer vision tool to identify the assets or (2) a utility-mapping tool based on inference or logic rules to identify assets and predict the underground network. While it was argued by White et al. [2] that the concept of AM is more suitable for fluid-carrying utilities that depend on a gravity-flow rather than being pressurized, other works demonstrated the potential of AM to be successful for both fluid and non-fluid carrying utilities. For instance, Hassan et al. [3] generated an electrical utility map based on the location of transformers and poles using geographic information system (GIS) data.
One of the limitations of generating a utility map with the AM technique is its reliance on a knowledge database. While standards exist to harness such databases, such as those from the National Electric Safety Code and American Water Works Association, various uncertainties could lead to high variability in the accuracy of an automated process, including non-compliance [4] among utility operators and the presence of abandoned or out-of-service aboveground assets [5]. Additionally, the use of AM as an automated process was widely researched and demonstrated with manhole assets, but applications with other utility classes are still lacking.
A popular method to automate AM mapping of aboveground assets is through computer vision algorithms. This task consists of identifying key utility assets from pictures. Figure 1 illustrates an example through a street-level image, showing identifiable utility-related appurtenances and the position of underground utilities at that location.
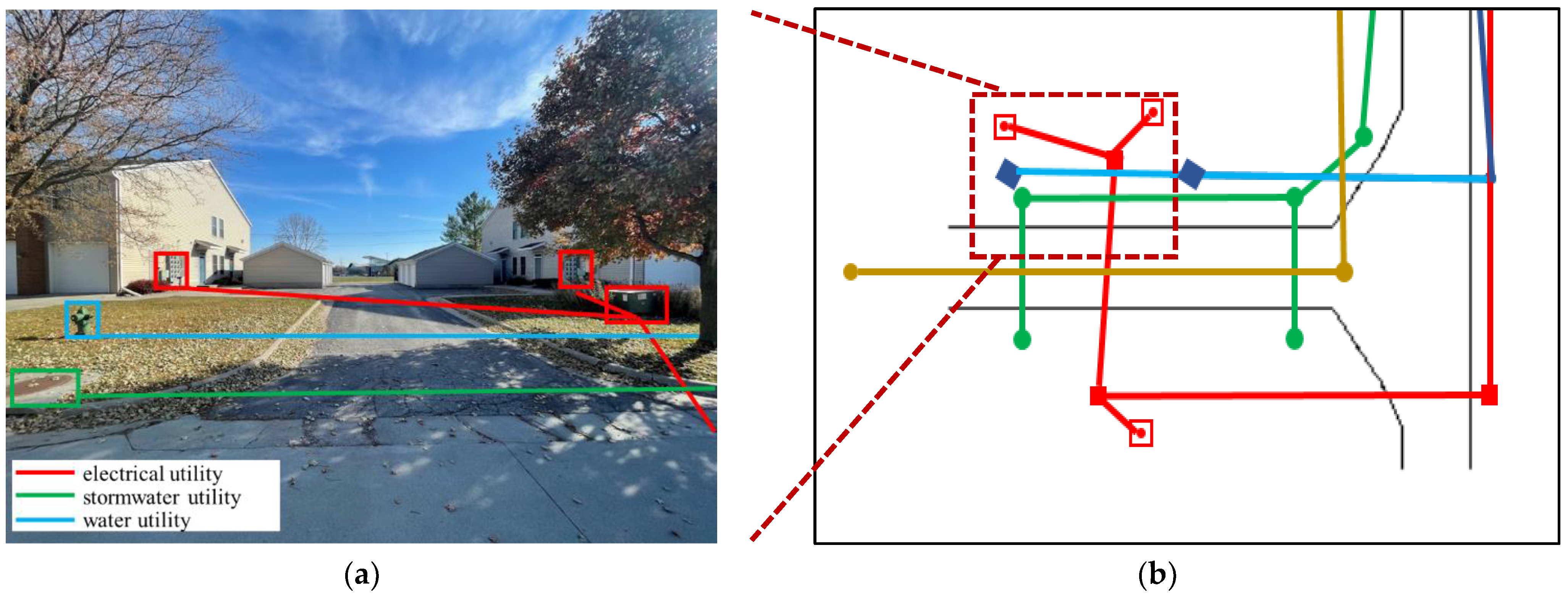
Figure 1. (a) Street-level image showing positions of utility appurtenance in rectangular boxes and the underground utility asset location in continuous lines; (b) utility map at the given location.
Potential sources of image inputs for AM include satellite imagery, aerial photographs, mobile images, photogrammetry, and light detection and ranging (LiDAR) technology collection. In particular, the use of satellite and aerial imagery can yield improved object recognition performance due to their improvement in image resolution [6]. As an example, Shermeyer et al. [7] found that the improvement in satellite imagery resolution from 30 cm/pixel to 15 cm/pixel upgraded the mean average precision of their object detection algorithm from 13% to 36%. Related to the application of satellite and aerial imagery to mapping utilities, Mnih et al. [8] applied a neural network approach to learn and detect road patterns. The detection of road patterns can be critical in mapping utilities as these sets of infrastructure are typically co-located [9]. There are additional examples of utility mapping using imagery. Bartoli et al. [10] reconstructed urban drainage networks by detecting manhole covers using a circular detection filter on orthophotos and satellite images. Pasquet et al. [11] identified the presence of underground utilities by locating manhole covers and stormwater drains from high-resolution aerial images using a linear support vector machine (SVM) classifier and a histogram of oriented gradients (HOG) that performed similarly to the circular detection filter used in Bartoli et al. [10].
Overall, the use of AI in conjunction with AM processes includes a vast array of methods to conduct both asset identification and buried utility location. Yet, from the review, the vast majority of works focused on the detection of manholes and their use in utility mapping. This disproportionate attention precluded the applications of AM and AI techniques to other utilities, such as electricity, natural gas, and telecommunication. There is also a lack of frameworks that combine both the tasks of asset identification and utility location.
2. Terrestrial Mapping
Terrestrial mapping (TM), not including photography, is typically conducted to achieve higher levels of mapping accuracy than those attainable via AM techniques. These can include the use of geophysical investigations or intrusive measures to achieve SUE quality-level A mapping accuracy through techniques such as vacuum excavation [12]. This method is widely used in today’s utility locating practices [13][14]. However, intrusive exposures for mapping can be costly as it can potentially disrupt critical activities such as construction and traffic [15], especially where utilities are within transportation right of way. The invasive technique also requires close attention to details during excavation to prevent damage to buried assets. A solution is to adopt non-intrusive sensing systems and geophysical tools such as ground-penetrating radar (GPR), metal detectors, vibro-acoustic systems, radio-frequency locators, and geoelectrical-resistive sensing methods [16]. These sensing methods output SUE quality-level B data [17], which has the potential to be further refined using data fusion techniques [18][19].
However, non-intrusive sensing requires highly trained operators to assess and evaluate information from scanned data [20]. Data processing can also be challenging, even for experts [21]. AI techniques provide a promising solution for assisting the non-intrusive process by automatically and rapidly evaluating sensing data to support actionable decisions.
GPR-generated data can be complex to analyze. Typically, the hyperbolic signatures form by joining the discrete travel time of the electromagnetic waves as they pulse back from the targets [22]. Information such as the object’s depth and horizontal position is estimated using the hyperbolic signature’s spread, position in radargram, and degree of resolution. Yet, the manual reading of radargrams is often challenging due to the intrinsic differences in material properties of targets and soil characteristics. Several AI tools were developed and applied to assist the interpretation of GRP-collected data, in particular for applications regarding underground utilities [23][24][25][26].
One popular tool is the Hough transform (HT), used to extract geometrical features in images [27]. It was used by Capineri et al. [28] in locating the position of buried objects represented by hyperbola in GPR radargrams. The HT was also used in Al-Nuaimy et al. [29], where the HT was combined with a backpropagating neural network to detect buried utilities and other solid objects. Al-Nuaimy et al. [30] proposed an adaptive non-accumulated Hough transform (ANHT) to reduce the memory demand relative to the conventional HT and demonstrated that the technique could be applied to detect linear structures such as pipes and cables. Modified HT variants were proposed. For instance, Simi et al. [31] developed the randomized HT that yielded underground utility detection accuracy greater than 85% over different ground conditions such as asphalt, grass, and concrete; Al-Nuaimy et al. [29] used a modified HT to detect targets in a GPR radargram with a significantly low signal-to-noise ratio; and Maas et al. [32] combined the Viola–Jones learning algorithm with the HT to separate regions of interest and extract vertices and locations of the hyperbola. Other works adopted the HT technique for recognizing, localizing, and evaluating hyperbolic indications, wave velocity, buried pipe diameters, and asset depths in radargram [33][34][35][36].
It was argued in Chen and Cohn [36] that some early methods enabling automatic detection in GPR hyperbolic signatures were not suitable for on-site applications due to their computation complexity and unsatisfactory detection rate resulting from insufficient training. The authors proposed a probabilistic hyperbolae mixture model based on a classification expectation-maximization algorithm and a Bayesian information criterion for model selection. Compared to other HT, their proposed model completed the utility identification task in 1.7 s, while the HT completed a similar task in 226.1 s. In Dou et al. [37], a column-connect clustering algorithm was developed, which first discriminates targeted utilities represented as hyperbolas from the radargram background, with the algorithm yielding a 23% improvement in detection rate than for the pattern recognition technique used for a similar task in [32]. A variant of the column-connect clustering algorithm was investigated by Rosin, P. [38] that resulted in a 6% improvement in the model accuracy (F1-score).
Support vector machine (SVM) gained popularity in GPR data classification tasks. Zhang et al. [39] used SVM for the automatic extraction and classification of buried landmines from a GPR radargram; El-Mahallawy et al. [40] adopted an SVM classifier to identify underground utilities and showed 100% and 78% recognition accuracies in an ideal and noise-degraded environment, respectively; Lu et al. [41] proposed to combine a discrete wavelet transform, fractional Fourier transform, and SVM for classifying subsurface objects material from GPR data; Terrasse et al. [42] detected buried gas pipes using an SVM classifier and reported a 96% detection rate; Kaur et al. [43] combined HOG with SVM to map deteriorated reinforcement bars; Noreen et al. [44] automated buried pipe detections using HOG features clustered with an SVM algorithm; and Ozkaya et al. [45] fed features extracted from GPR radargram images using convolutional neural networks into an SVM algorithm to detect and classify hyperbolic signatures, material, shape and soil type.
Genetic programming (GP) was employed in automating GPR data processing. Pasolli et al. [46] proposed an automatic detection process that uses an iterative genetic algorithm to detect and locate the position of underground utilities in GPR radargrams. Kobashigawa et al. [47] adopted GP to detect buried unexploded ordnances in GPR radargrams. The GP algorithm performance was compared against different neural networks of varying hidden layers and showed improved performance over complex radargrams. Additionally, Harkat et al. [48] proposed to utilize a radial basis network with a multi-objective genetic algorithm to improve region classifications.
There is also a vast amount of research that focused on the use of neural networks in processing GPR radargrams. For example, Birkenfeld, S. [49] presented a non-fully connected neural network model that identifies interfering or incomplete hyperbolas. Lei et al. [21] proposed the faster region-based convolution neural network (R-CNN) and data augmentation to detect regions of buried objects in GPR images. Liu et al. [50] proposed a deep learning model, termed a single shot multi-box detector, to detect hyperbolae. When compared with the faster R-CNN model adopted by Lei et al. [21], the technique showed a higher precision rate with lower computational time. Yamaguchi et al. [51] conducted the 3-D location of buried pipes in GPR radargrams using 3D-CNN. A 10% improvement in accuracy level was observed when compared to an SVM. The extracted positions, inclinations, and arrangement of pipes were visualized in a 3-D map using Kirchhoff migration. Liu et al. [52] identified limitations in using hyperbolic signatures as the primary representative feature for buried utilities. The 3D GPR scan images formed by stitching parallel scan data were used as input to a 3D CNN. The proposed method produced a detection accuracy of 82.7%, compared with 69% for CNN with 2D GPR input data and 61% to 73.5% for other methods that included the AlexNet, ResNet50, VGG16 and 19, and Triplanar algorithms.
In summary, most of the reviewed literature in this section focused more on GPR because it remains the most used electromagnetic sensor for utility mapping. Other sensors demand AI applications to further improve data interpretation, such as vibro-acoustic and metal detectors that are used for non-metallic utility detection and rapid utility probing, respectively.
3. Data/Information Fusion
The previous two sections focused on the use of AI to interpret single-source data. In creating virtual sensors capable of mapping underground utilities based on limited information, one must consider the integration of multi-source data in order to improve the quality of the harnessed information and, thus, the accuracy of maps through a process known as data fusion [53][54][55][56]. For example, Dutta et al. [57] proposed to fuse GPR and vibro-acoustic data to combine sensing performance in reading through non-saturated soils (GPR) and saturated soils (vibro-acoustic), and Metje et al. [1] studied the potential of combining GPR, low-frequency quasi-static electromagnetic fields, and acoustic technologies to improve underground utility mapping accuracy. Generally, while the fusion of data is conducted through user-defined rules and metrics, the iterative process is automated for robustness over extensive knowledge and data space [58]. This section surveys different AI techniques used in fusing data in order to produce maps of underground utilities.
Fuzzy logic was used by Lanka et al. [59] as an approximate reasoning method to fuse data from different sources. The proposed model determines the probability of a utility to be located at any Cartesian point based on (1) proximity to manholes; (2) perpendicular distance from the point of interest to the nearest known utility line; (3) expert knowledge on a possible underground utility route; and (4) GPR data analysis. Another technique studied by Chen and Cohn [60] is based on Bayesian data fusion (BDF) to automatically produce refined utility maps by fusing GPR data, surveyed manholes, assumptions on pipe linearity, and utility records. Manholes are investigated to determine the depths and orientations of the underground pipes. This adopted the joint compatibility branch and bound algorithm developed by Neira and Tardos [61] to establish an initial map by matching utilities discovered from the manhole survey and GPR scan. Prior knowledge used in the BDF is deduced by matching connections in the as-built maps and GPR-detected points. With the Gaussian distribution assumed, the posterior probability of the BDF is estimated from prior and likelihood probabilities. The posterior map is automatically refined through an iterative process guided by a validation threshold.
Recent work by Zhou et al. [62] proposed a probabilistic pipeline mapping model that fuses records, pipe information from manhole covers, and remote sensing technologies such as GPR and electro-magnetic. The model maximizes the likelihood of fitting a pipeline from the set of detected points. By integrating the Bayesian information criterion, the proposed model avoids overfitting when classifying and fitting detected points into the most probable pipeline. The authors compared the performance of their algorithm with that proposed in Chen and Cohn [60] and demonstrated fewer mapping errors.
The reviewed literatures combined different data sources, mostly GPR, utility records, manhole survey, and other sensors. One underlying common limitation to most work is the reliance on manhole surveys. Firstly, it restricts the applicability to manhole-related utilities, and secondly, it is burdensome to open up and determine the geospatial coordinates of every manhole in the area of interest at the same time. It should also be noted that techniques relying on as-built maps as prior knowledge can be challenging to apply when such information is unavailable or outdated.
References
- Metje, N.; Atkins, P.R.; Brennan, M.J.; Chapman, D.N.; Lim, H.M.; Machell, J.; Muggleton, J.M.; Pennock, S.; Ratcliffe, J.; Redfern, M.; et al. Mapping the Underworld—State-of-the-Art Review. Tunn. Undergr. Space Technol. 2007, 22, 568–586.
- White, C.G.; Nielsen, M.G.; Hayward, R. Lessons Learned Mapping Critical Pressure Pipelines: City of Ottawa Case Studies. Pipelines 2017, 78–88.
- Hassan, H.T.; Akhtar, M.F. Mapping of Power Distribution Network Using Geographical Information System (GIS). Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 343–347.
- Li, S.; Cai, H.; Kamat, V.R. Integrating Natural Language Processing and Spatial Reasoning for Utility Compliance Checking. J. Constr. Eng. Manag. 2016, 142, 04016074.
- Anspach, J.H.; Robison, A.G.; Clark, S.T.; Tomanek, M.J. The Need for Utility Data Governance Policies for Improving Lifeline Recovery. Lifelines 2022, 749–755.
- Neupane, B.; Horanont, T.; Aryal, J. Deep Learning-Based Semantic Segmentation of Urban Features in Satellite Images: A Review and Meta-Analysis. Remote Sens. 2021, 13, 808.
- Shermeyer, J.; Van Etten, A. The Effects of Super-Resolution on Object Detection Performance in Satellite Imagery. arXiv 2019, arXiv:1812.04098.
- Mnih, V.; Hinton, G.E. Learning to Detect Roads in High-Resolution Aerial Images. In Computer Vision, Proceedings of the ECCV 2010: 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Daniilidis, K., Maragos, P., Paragios, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 210–223.
- Analysing Utility Tunnels and Highway Networks Coordination Dilemma—ScienceDirect. Available online: https://www.sciencedirect.com/science/article/pii/S0886779808000771 (accessed on 21 December 2022).
- Bartoli, O.; Chahinian, N.; Allard, A.; Bailly, J.-S.; Chancibault, K.; Rodriguez, F.; Salles, C.; Tournoud, M.-G.; Delenne, C. Manhole Cover Detection Using a Geometrical Filter on Very High Resolution Aerial and Satellite Images. In Proceedings of the 2015 Joint Urban Remote Sensing Event (JURSE), Lausanne, Switzerland, 30 March–1 April 2015; pp. 1–4.
- Pasquet, J.; Desert, T.; Bartoli, O.; Chaumont, M.; Delenne, C.; Subsol, G.; Derras, M.; Chahinian, N. Detection of Manhole Covers in High-Resolution Aerial Images of Urban Areas by Combining Two Methods. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1802–1807.
- Sciulli, A.E. Surveys of Subsurface Utilities Can Reduce Risk in Plant Decommissioning. Nat. Gas Electr. 2015, 31, 9–14.
- Uslu, B.; Jung, Y.J.; Sinha, S.K. Underground Utility Locating Technologies for Condition Assessment and Renewal Engineering of Water Pipeline Infrastructure Systems. J. Pipeline Syst. Eng. Pract. 2016, 7, 04016011.
- Jeong, H.; Arboleda, C.; Abraham, D. Imaging and Locating Buried Utilities; JTRP Technical Reports; Joint Transportation Research Program, Indiana Department of Transportation and Purdue University: West Lafayette, IN, USA, 2003; pp. 57–96.
- Najafi, D.M.; Gokhale, D.S.; Calderón, D.R.; Ma, D.B. Overview and Comparison of Trenchless Technologies; McGraw-Hill Education: New York, NY, USA, 2021; ISBN 978-1-260-45873-2.
- Royal, A.C.D.; Atkins, P.R.; Brennan, M.J.; Chapman, D.N.; Chen, H.; Cohn, A.G.; Foo, K.Y.; Goddard, K.F.; Hayes, R.; Hao, T.; et al. Site Assessment of Multiple-Sensor Approaches for Buried Utility Detection. Int. J. Geophys. 2011, 2011, e496123.
- ASCE. Standard Guidelines for the Collection and Depiction of Existing Subsurface Utility Data, 38th ed.; American Society of Civil Engineers: Reston, VA, USA, 2002; ISBN 978-0-7844-0645-8.
- Metwaly, M. Application of GPR Technique for Subsurface Utility Mapping: A Case Study from Urban Area of Holy Mecca, Saudi Arabia. Measurement 2015, 60, 139–145.
- Dou, Q.; Wei, L.; Magee, D.R.; Atkins, P.R.; Chapman, D.N.; Curioni, G.; Goddard, K.F.; Hayati, F.; Jenks, H.; Metje, N.; et al. 3D Buried Utility Location Using A Marching-Cross-Section Algorithm for Multi-Sensor Data Fusion. Sensors 2016, 16, 1827.
- Ambrosanio, M.; Franceschini, S.; Autorino, M.M.; Pascazio, V. Convolutional Neural Networks for Tomographic MIMO Ground Penetrating Radar Imaging. In Proceedings of the 2021 7th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Online, 1–3 November 2021; pp. 1–5.
- Lei, W.; Hou, F.; Xi, J.; Tan, Q.; Xu, M.; Jiang, X.; Liu, G.; Gu, Q. Automatic Hyperbola Detection and Fitting in GPR B-Scan Image. Autom. Constr. 2019, 106, 102839.
- Lee, K.L.; Mokji, M.M. Automatic Target Detection in GPR Images Using Histogram of Oriented Gradients (HOG). In Proceedings of the 2014 2nd International Conference on Electronic Design (ICED), Online, 19–21 August 2014; pp. 181–186.
- Slob, E.C.; Groenenboom, J.; Fokkema, J.T. Automated Acquisition and Processing of 3D GPR Data for Object Detection and Characterization. Subsurf. Sens. Technol. Appl. 2003, 4, 5–18.
- Mazzucchelli, P.; Molteni, D.; di Buono, N.; Cottino, E. 3D GPR Real? Time Automated Detection of Buried Utilities. In Symposium on the Application of Geophysics to Engineering and Environmental Problems Proceedings 2012; Environment and Engineering Geophysical Society: Denver, CO, USA, 2012; pp. 309–315.
- Li, H.; Li, N.; Wu, R.; Wang, H.; Gui, Z.; Song, D. GPR-RCNN: An Algorithm of Subsurface Defect Detection for Airport Runway Based on GPR. IEEE Robot. Autom. Lett. 2021, 6, 3001–3008.
- Singh, N.P.; Nene, M.J. Buried Object Detection and Analysis of GPR Images: Using Neural Network and Curve Fitting. In Proceedings of the 2013 Annual International Conference on Emerging Research Areas and 2013 International Conference on Microelectronics, Communications and Renewable Energy, Online, 4–6 June 2013; pp. 1–6.
- Illingworth, J.; Kittler, J. A Survey of the Hough Transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116.
- Capineri, L.; Grande, P.; Temple, J.a.G. Advanced Image-Processing Technique for Real-Time Interpretation of Ground-Penetrating Radar Images. Int. J. Imaging Syst. Technol. 1998, 9, 51–59.
- Al-Nuaimy, W.; Huang, Y.; Nakhkash, M.; Fang, M.T.C.; Nguyen, V.T.; Eriksen, A. Automatic Detection of Buried Utilities and Solid Objects with GPR Using Neural Networks and Pattern Recognition. J. Appl. Geophys. 2000, 43, 157–165.
- Al-Nuaimy, W.; Lu, H.H.; Shihab, S.; Eriksen, A. Automatic Mapping of Linear Structures in 3-Dimensional Space from Ground-Penetrating Radar Data. In Proceedings of the IEEE/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas (Cat. No.01EX482), Rome, Italy, 8–9 November 2001; pp. 198–201.
- Simi, A.; Bracciali, S.; Manacorda, G. Hough Transform Based Automatic Pipe Detection for Array GPR: Algorithm Development and on-Site Tests. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6.
- Maas, C.; Schmalzl, J. Using Pattern Recognition to Automatically Localize Reflection Hyperbolas in Data from Ground Penetrating Radar. Comput. Geosci. 2013, 58, 116–125.
- Chiang, P.; Tantum, S.L.; Collins, L.M. Signal Processing of Ground-Penetrating Radar Data for Subsurface Object Detection. In Proceedings of the Detection and Remediation Technologies for Mines and Minelike Targets VI, Bellingham, WA, USA, 18 October 2001; Volume 4394, pp. 470–475.
- Shihab, S.; Al-Nuaimy, W. Radius Estimation for Cylindrical Objects Detected by Ground Penetrating Radar. Subsurf. Sens. Technol. Appl. 2005, 6, 151–166.
- Long, K.; Liatsis, P.; Davidson, N. Image Processing of Ground Penetrating Radar Data for Landmine Detection. In Proceedings of the Detection and Remediation Technologies for Mines and Minelike Targets XI, Bellingham, WA, USA, 18 May 2006; Volume 6217, pp. 837–848.
- Chen, H.; Cohn, A.G. Probabilistic Robust Hyperbola Mixture Model for Interpreting Ground Penetrating Radar Data. In Proceedings of the the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–8.
- Dou, Q.; Wei, L.; Magee, D.R.; Cohn, A.G. Real-Time Hyperbola Recognition and Fitting in GPR Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 51–62.
- Rosin, P.L. Unimodal Thresholding. Pattern Recognit. 2001, 34, 2083–2096.
- Zhang, J.; Liu, Q.; Nath, B. Landmine Feature Extraction and Classification of GPR Data Based on SVM Method. In International Symposium on Neural Networks, Proceedings of the Advances in Neural Networks—ISNN 2004, Dalian, China, 19–21 August 2004; Yin, F.-L., Wang, J., Guo, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 636–641.
- El-Mahallawy, M.S.; Hashim, M. Material Classification of Underground Utilities From GPR Images Using DCT-Based SVM Approach. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1542–1546.
- Lu, Q.; Pu, J.; Liu, Z. Feature Extraction and Automatic Material Classification of Underground Objects from Ground Penetrating Radar Data. J. Electr. Comput. Eng. 2014, 2014, 28.
- Terrasse, G.; Nicolas, J.-M.; Trouvé, E.; Drouet, É. Automatic Localization of Gas Pipes from GPR Imagery. In Proceedings of the 2016 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 29 August–2 September 2016; pp. 2395–2399.
- Kaur, P.; Dana, K.J.; Romero, F.A.; Gucunski, N. Automated GPR Rebar Analysis for Robotic Bridge Deck Evaluation. IEEE Trans. Cybern. 2016, 46, 2265–2276.
- Noreen, T.; Khan, U.S. Using Pattern Recognition with HOG to Automatically Detect Reflection Hyperbolas in Ground Penetrating Radar Data. In Proceedings of the 2017 International Conference on Electrical and Computing Technologies and Applications (ICECTA), Ras Al Khaimah, United Arab Emirates, 21–23 November 2017; pp. 1–6.
- Ozkaya, U.; Melgani, F.; Belete Bejiga, M.; Seyfi, L.; Donelli, M. GPR B Scan Image Analysis with Deep Learning Methods. Measurement 2020, 165, 107770.
- Pasolli, E.; Melgani, F.; Donelli, M.; Attoui, R.; de Vos, M. Automatic Detection and Classification of Buried Objects in GPR Images Using Genetic Algorithms and Support Vector Machines. In Proceedings of the IGARSS 2008, 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 6–11 July 2008; Volume 2, pp. II-525–II-528.
- Kobashigawa, J.S.; Youn, H.; Iskander, M.F.; Yun, Z. Classification of Buried Targets Using Ground Penetrating Radar: Comparison between Genetic Programming and Neural Networks. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 971–974.
- Harkat, H.; Ruano, A.E.; Ruano, M.G.; Bennani, S.D. GPR Target Detection Using a Neural Network Classifier Designed by a Multi-Objective Genetic Algorithm. Appl. Soft Comput. 2019, 79, 310–325.
- Birkenfeld, S. Automatic Detection of Reflexion Hyperbolas in Gpr Data with Neural Networks. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010; pp. 1–6.
- Liu, H.; Lin, C.; Cui, J.; Fan, L.; Xie, X.; Spencer, B.F. Detection and Localization of Rebar in Concrete by Deep Learning Using Ground Penetrating Radar. Autom. Constr. 2020, 118, 103279.
- Yamaguchi, T.; Mizutani, T.; Nagayama, T. Mapping Subsurface Utility Pipes by 3-D Convolutional Neural Network and Kirchhoff Migration Using GPR Images. IEEE Trans. Geosci. Remote Sens. 2021, 59, 6525–6536.
- Liu, L.; Yu, H.; Xu, H.; Wang, B.; Li, J. Underground Object Classification Using Deep 3-D Convolutional Networks and Multiple Mirror Encoding for GPR Data. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4021705.
- Hall, D.L.; McMullen, S.A. Mathematical Techniques in Multisensor Data Fusion; Artech House: Norfolk County, MA, USA, 2004.
- Moravec, H.P. Sensor Fusion in Certainty Grids for Mobile Robots. In Sensor Devices and Systems for Robotics, Proceedings of the Special Issue on the IEEE 2008 International Geoscience and Remote Sensing Symposium (IGARSS 2008), Boston, MA, USA, 19 August 2008; Casals, A., Ed.; Springer: Berlin/Heidelberg, Germany, 1989; pp. 253–276.
- Dong, J.; Zhuang, D.; Huang, Y.; Fu, J. Advances in Multi-Sensor Data Fusion: Algorithms and Applications. Sensors 2009, 9, 7771–7784.
- Abdel-Aleem, M.; Chibelushi, C.C.; Moniri, M. Multisensor Data Fusion for the Simultaneous Location and Condition Assessment of Underground Water Pipelines. In Proceedings of the 2011 International Conference on Networking, Sensing and Control, Delft, The Netherlands, 11–13 April 2011; pp. 416–421.
- Dutta, R.; Cohn, A.G.; Muggleton, J.M. 3D Mapping of Buried Underworld Infrastructure Using Dynamic Bayesian Network Based Multi-Sensory Image Data Fusion. J. Appl. Geophys. 2013, 92, 8–19.
- Brierley, N.; Tippetts, T.; Cawley, P. Data Fusion for Automated Non-Destructive Inspection. Proc. R. Soc. Math. Phys. Eng. Sci. 2014, 470, 20140167.
- Lanka, M.; Butler, A.; Sterling, R. Use of Approximate Reasoning Techniques for Locating Underground Utilities. Tunn. Undergr. Space Technol. 2001, 16, 13–31.
- Chen, H.; Cohn, A.G. Buried Utility Pipeline Mapping Based on Multiple Spatial Data Sources: A Bayesian Data Fusion Approach. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Barcelona, Catalonia, Spain, 16–22 July 2011.
- Neira, J.; Tardos, J.D. Data Association in Stochastic Mapping Using the Joint Compatibility Test. IEEE Trans. Robot. Autom. 2001, 17, 890–897.
- Zhou, X.; Chen, Q.; Jiang, B.; Chen, H. An Underground Pipeline Mapping Method Based on Fusion of Multisource Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4511711.
More
Information
Subjects:
Engineering, Civil
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.7K
Revisions:
3 times
(View History)
Update Date:
18 May 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No