 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Rakibuzzaman Shah | -- | 3045 | 2023-04-21 12:43:42 | | | |
| 2 | Jason Zhu | Meta information modification | 3045 | 2023-04-23 03:58:18 | | |
Video Upload Options
The microgrid (MG) system is a controlled and supervised power system consisting of renewable energy (RE)-based distributed generation (DG) units, loads, and energy storage. The MG can be operated autonomously or while connected to the grid. Higher intermittencies and uncertainties can be observed in MGs compared to the conventional power system, which is the possible source of small-signal stability in MG systems. It can be seen as disturbances around the stable operating point, which potentially lead to the small-signal instability problem within MGs. Small-signal instability issues also emerge due to the lack of damping torque in the MG. The integration of power electronic devices and complex control algorithms within MGs introduces novel challenges in terms of small-signal stability and possible resonances. The occurrence of interaction in a low- or no-inertia system might worsen the stability margin, leading to undamped oscillatory instability. The interaction within the MG is characterized by various frequency ranges, from low-frequency subsynchronous oscillation to high-frequency ranges around the harmonic frequencies.
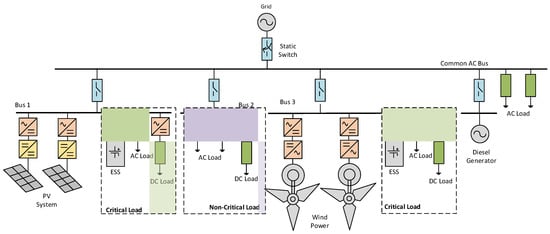
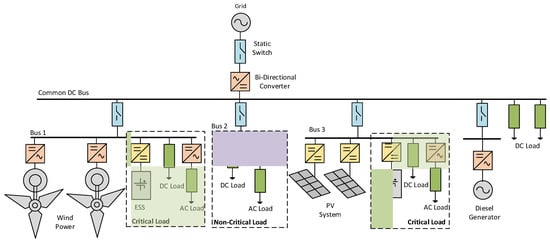
1. Microgrid Architectures
2. Small-signal Model for Power Electronic Devices
3. Small-Signal Stability in Microgrid
References
- Patrao, I.; Figueres, E.; Garcerá, G.; González-Medina, R. Microgrid architectures for low voltage distributed generation. Renew. Sustain. Energy Rev. 2015, 43, 10. Available online: https://196.160.120.134/Microgrid-architectures-for-low-voltage-distri.pdf (accessed on 26 November 2022).
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.-W. AC-Microgrid versus DC-Microgrid with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. Available online: https://218.58.112.154/AC-microgridsversusDC-microgridswithdistribute.pdf (accessed on 15 November 2022).
- Wu, R.; Dewan, S.; Slemon, G. A PWM AC-to-DC Converter with Fixed Switching Frequency. IEEE Trans. Ind. Appl. 1990, 26, 6. Available online: https://0803104022/A PWM-AC-to-DC-Converter-with-Fixed-Switching.pdf (accessed on 10 November 2022).
- Wu, R.; Dewan, S.B.; Slemon, G.R. Analysis of an AC-to-DC Voltage Source Converter using PWM with Phase and Amplitude Control. IEEE Trans. Ind. Appl. 1991, 27, 12. Available online: https://0878116090/Analysis of an ac-to-dc Voltage Source 1991.pdf (accessed on 20 October 2022).
- Rahim, N.A.; Quaicoe, J.E. Small Signal Model and Analysis of a Mulitple Feedback Control Scheme for Three Phase Voltage Source UPS Inverter. In Proceedings of the Power Electronics Specialist Conference, Baveno, Italy, 23–27 June 1996; pp. 188–194. Available online: https://211.213.252.125/Small-Signal-Model-and-Analysis-of-A-Multiple.pdf (accessed on 26 November 2022).
- Rahim, N.; Quaicoe, J. Multiple Feedback Loop Control Strategy for Single Phase Voltage Source Inverter. In Proceedings of the 1994 Power Electronics Specialist Conference, Taipei, Taiwan, 20–25 June 1994; Volume 2, pp. 958–964. Available online: https://0460809759/Multiple-Feedback-Loop-Control-Strategy-for.pdf (accessed on 20 October 2022).
- Nimpitiwan, N.; Kaitwanidvilai, S. Static Output Feedback Robust Loop Shaping Control for Grid Connected Inverter using Genetic Algorithms. Int. J. Innov. Comput. Inf. Control 2012, 8, 6081–6093. Available online: https://100.232.110.74/Static-Output-Feedback-Robust-loop-Shaping.pdf (accessed on 19 November 2022).
- Rese, L.; Costa, S.; Silva, A.S. Enhanced Modeling and Control of VSIs in Microgrids Operating in Grid-Connected Mode. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; pp. 1–8. Available online: https://121.76.110.230/Enhanced-Modeling-and-Control-of-VSIs-in.pdf (accessed on 20 October 2022).
- Majumder, R. Some Aspects of Stability in Microgrids. IEEE Trans. Power Syst. 2013, 28, 3243–3252.
- Krismanto, A.; Mithulananthan, N.; Krause, O. Small Signal Stability of Renewable Energy based Microgrid in Autonomous Operation. Sustain. Energy Grid Netw. J. 2018, 13, 134–147.
- Parol, M.; Rokicki, Ł. Voltage stability in low voltage microgrids in aspects of active and reactive power demand. Arch. Electr. Eng. 2016, 65, 19.
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage Stability and Reactive Power Sharing in Inverter-Based Microgrids with Consensus-Based Distributed Voltage Control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109.
- Wang, X.; Guerrero, J.M.; Blaabjerg, F.; Chen, Z. A review of power electronics based microgrids. J. Power Electron. 2012, 12, 181–192.
- Dobson, I.; Zhang, J.; Greene, S.; Engdahl, H.; Sauer, P.W. Is Strong Modal Resonance a Precursor to Power System Oscillations? IEEE Trans. Circuit Syst. Fundam. Theory Appl. 2001, 48, 340–349. Available online: https://99.93.194.209/Is-Strong-Modal-Resonance-a-Precursor-to-Power.pdf (accessed on 20 October 2022).
- Katerei, F.; Iravani, M.R.; Lehn, P.W. Small-signal dynamic model of a micro-grid including conventional and electronically interfaced distributed resources. IET Gen. Transm. Distrib. 2007, 1, 369–378. Available online: https://207.62.183.137/Small-signal dynamic-model-of-a-micro-grid.pdf (accessed on 20 October 2022).
- Kroutikova, N.; Hernandez-Aramburo, C.A.; Green, T.C. State-space model of grid-connected inverters under current control mode. IET Electr. Power Appl. 2007, 1, 329–338.
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625.
- Krismanto, A.; Mithulananthan, N.; Lee, K.Y. Comprehensive Modelling and Small Signal Stability Analysis of RES-based Microgrid. In Proceedings of the 9th IFAC Symposium on Control of Power and Energy Systems CPES, New Delhi, India, 9–11 December 2015; Elsevier: Amsterdam, The Netherlands, 2015; pp. 282–287. Available online: https://204.222.114.95/Comprehensive-Modelling-and-Small-Signal-Stabi.pdf (accessed on 20 October 2022).
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924.
- Coelho, E.; Cortizo, P.C.; Garcia, P.F.D. Small-signal stability for parallel-connected inverters in stand-alone AC supply systems. IEEE Trans. Ind. Appl. 2002, 38, 533–542.
- Karimi, H.; Nikkhajoei, H.; Iravani, R. Control of an Electronically-Coupled Distributed Resource Unit Subsequent to an Islanding Event. IEEE Trans. Power Deliv. 2008, 23, 493–500. Available online: https://72.111.107.171/Control of an Electronically-Coupled Distribut.pdf (accessed on 20 October 2022).
- Etemadi, A.H.; Iravani, R. Eigenvalue and Robustness Analysis of a Decentralized Voltage Control Scheme for an Islanded Multi-DER Microgrid. In Proceedings of the Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. Available online: https://78.108.109.189/Eigenvalue-and-Robustness-Analysis-of-a.pdf (accessed on 20 October 2022).
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An Accurate Small-Signal Model of Inverter-Dominated Islanded Microgrids Using dq Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. Available online: https://205.228.117.138/An Accurate Small-Signal Model of Inverter-.pdf (accessed on 20 October 2022).
- Farrokhabadi, M.; Canizares, C.A.; Simpson-Porco, J.W.; Nasr, E.; Fan, L.; Mendoza-Araya, P.A.; Tonkoski, R.; Tamrakar, U.; Hatziargyriou, N.D.; Lagos, D.; et al. Microgrid Stability Definitions, Analysis, and Examples. IEEE Trans. Power Syst. 2020, 35, 13–29.
- Barklund, E.; Pogaku, N.; Prodanovic, M.; Hernandez-Aramburo, C.; Green, T.C. Energy Management in Autonomous Microgrid Using Stability-Constrained Droop Control of Inverters. IEEE Trans. Power Electron. 2008, 23, 2346–2351. Available online: https://174.250.184.177/Energy-Management-in-Autonomous-Microgrid-Usin.pdf (accessed on 20 October 2022).
- Tang, X.; Deng, W.; Qi, Z. Investigation of the Dynamic Stability of Microgrid. IEEE Trans. Power Syst. 2014, 29, 698–706. Available online: https://204.159.118.22/Investigation-of-the-Dynamic-Stability-of-Micr.pdf (accessed on 20 October 2022).
- Bottrell, N.; Prodanovic, M.; Green, T. Dynamic Stability of a Microgrid with an Active Load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. Available online: https://215.254.111.145/Dynamic-Stability-of-a-Microgrid-with.pdf (accessed on 26 November 2022).
- Bottrell, N.; Green, T.C. Control and Modelling for Power Electronics. 2012, pp. 1–8. Available online: https://161.141.109.80/Modeling-Microgrids-with-Active-Loads.pdf (accessed on 20 October 2022).
- Kahrobaeian, A.; Mohamed, Y.-R.I. Analysis and Mitigation of Low-Frequency Instabilities in Autonomous Medium-Voltage Converter-Based Microgrids with Dynamic Loads. IEEE Trans. Ind. Electron. 2014, 61, 1643–1658. Available online: https://173.217.114.17/Analysis and Mitigation of Low-Frequency.pdf (accessed on 20 October 2022).
- Radwan, A.; Mohamed, Y.-R. Stabilization of Medium-Frequency Modes in Isolated Microgrids Supplying Direct Online Induction Motor Loads. IEEE Trans. Smart Grid 2014, 5, 358–370. Available online: https://143.157.116.113/Stabilization-of-Medium-Frequency-Modes.pdf (accessed on 20 October 2022).
- Mohamed, Y.-R.I.; El-Saadany, E.F. Adaptive Decentralized Droop Controller to Preserve Power Sharing Stability of Paralleled Inverters in Distributed GenerationMicrogrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. Available online: https://75.42.185.218/Adaptive-Decentralized-Droop-Controller-to-Pre.pdf (accessed on 20 October 2022).
- Krismanto, A.; Mithulananthan, N.; Setiadi, H.; Setyawan, E.; Abdillah, M. Impacts of grid-tied microgrid on stability and interaction of power systems considering RE uncertainties. Sustain. Energy Grids Netw. 2021, 28, 100537.
- Krismanto, A.; Mithulananthan, N.; Krause, O. Microgrid Impact on Low Frequency Oscillation and Resonance in Power System. In Proceedings of the ISGT Asia Pacific 2016, Melbourne, Australia, 28 November–1 December 2016; Available online: https://164.248.212.185/Microgrid-Impact-on-Low-Frequency-Oscillation.pdf (accessed on 26 November 2022).
- Leitner, S.; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-Signal Stability Analysis of an Inverter-Based Microgrid with Internal Model-Based Controllers. IEEE Trans. Smart Grid 2018, 9, 5393–5402.
- Krismanto, A.U.; Nadarajah, M. Identification of Modal Interaction and Small Signal Stability in Autonomous Microgrid Operation. IET Gener. Transm. Distrib. 2017, 12, 247–257.
- Hamzeh, M.; Ghafouri, M.; Karimi, H.; Sheshyekani, K.; Guerrero, J.M. Power Oscillations Damping in DCMicrogrids. IEEE Trans. Energy Convers. 2016, 31, 970–980. Available online: https://154.4.106.88/Power-Oscillations-Damping-in-DC-Microgrids.pdf (accessed on 20 October 2022).
- Rashidirad, N.; Hamzeh, M.; Sheshyekani, K.; Afjei, E. A Simplified Equivalent Model for the Analysis of Low-Frequency Stability of Multi-Bus DC Microgrids. IEEE Trans. Smart Grid 2017, 9, 6170–6182. Available online: https://177.70.202.67/A Simplified Equivalent Model for the Analysis.pdf (accessed on 20 October 2022).
- Krismanto, A.U.; Mithulananthan, N.; Lomi, A. Dynamic droop control in microgrid for stability enhancement considering RES variation. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6.
- Karimi, A.; Pirayesh, A.; Aghdam, T.S.; Ajalli, M. DC micro grid small signal stability analysis. In Proceedings of the 18th Electric Power Distribution Conference, Kermanshah, Iran, 30 April–1 May 2013; pp. 1–4.
- Zhao, F.; Li, N.; Yin, Z.; Tang, X. Small-signal modeling and stability analysis of DC microgrid with multiple type of loads. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014; pp. 3309–3315.
- Kwasinski, A.; Onwuchekwa, C.N. Dynamic Behavior and Stabilization of DC Microgrids with Instantaneous Constant-Power Loads. IEEE Trans. Power Electron. 2011, 26, 822–834.
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836.
- Liu, S.; Zhu, W.; Cheng, Y.; Xing, B. Modeling and small-signal stability analysis of an islanded DC microgrid with dynamic loads. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 866–871.
- Liu, Z.; Su, M.; Sun, Y.; Han, H.; Hou, X.; Guerrero, J.M. Stability analysis of DC microgrids with constant power load under distributed control methods. Automatica 2018, 90, 62–72.
- Krismanto, A.; Mithulanthan, N. Probabilistic Small Signal Stability Analysis of Autonomous Wind-Diesel Microgrid. In Proceedings of the ISGT Asia Pacific 2017, Auckland, New Zealand, 4–7 December 2017.
- Krismanto, A.U.; Mithulananthan, N.; Kamwa, I. Oscillatory stability assessment of microgrid in autonomous operation with uncertainties. IET Renew. Power Gener. 2018, 12, 494–504.
- Xu, X.; Lin, T.; Zha, X. Probabilistic Analysis of Small Signal Stability of Microgrid Using Point Estimate Method. In Proceedings of the Sustainable Power Generation and Supply 2009 SUPERGEN’09, Nanjing, China, 6–7 April 2009; Available online: https://0966507968/Probabilistic Analysis of Small Signal Stabili.pdf (accessed on 20 November 2022).
- Krismanto, A.; Nadarajah, M.; Lomi, A.; Setiadi, H.; Abdillah, M. Copula-Monte Carlo Based Probabilistic Oscillatory Stability Analysis of Microgrid. Int. J. Intell. Eng. Syst. 2021, 14, 479–491.

