Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Thierry Yonga Chuengwa | -- | 2874 | 2023-03-27 09:34:15 | | | |
| 2 | Dean Liu | Meta information modification | 2874 | 2023-03-28 03:36:51 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Yonga Chuengwa, T.; Swanepoel, J.A.; Kurien, A.M.; Kanakana-Katumba, M.G.; Djouani, K. Enabling Technologies in Collaborative Assembly. Encyclopedia. Available online: https://encyclopedia.pub/entry/42552 (accessed on 24 June 2026).
Yonga Chuengwa T, Swanepoel JA, Kurien AM, Kanakana-Katumba MG, Djouani K. Enabling Technologies in Collaborative Assembly. Encyclopedia. Available at: https://encyclopedia.pub/entry/42552. Accessed June 24, 2026.
Yonga Chuengwa, Thierry, Jan Adriaan Swanepoel, Anish Matthew Kurien, Mukondeleli Grace Kanakana-Katumba, Karim Djouani. "Enabling Technologies in Collaborative Assembly" Encyclopedia, https://encyclopedia.pub/entry/42552 (accessed June 24, 2026).
Yonga Chuengwa, T., Swanepoel, J.A., Kurien, A.M., Kanakana-Katumba, M.G., & Djouani, K. (2023, March 27). Enabling Technologies in Collaborative Assembly. In Encyclopedia. https://encyclopedia.pub/entry/42552
Yonga Chuengwa, Thierry, et al. "Enabling Technologies in Collaborative Assembly." Encyclopedia. Web. 27 March, 2023.
Copy Citation
There is growing interest for manufacturing enterprises to embrace the drivers of the Smart Industry paradigm. Among these drivers, human–robot physical co-manipulation of objects has gained significant interest in the literature on assembly operations. Motivated by the requirement for human dyads between the human and the robot counterpart, the study of task allocation in human-robot collaboration literature shows promising trends for the implementation of ergonomics in collaborative assembly.
HRC
co-assembly
task allocation
modeling
posture estimation
muscle fatigue
1. Task Allocation
Task allocation in manufacturing is the problem of evaluating and assigning operations to existing resources within the most feasible sequence that improves economic performance and social benefits [1]. Traditionally, the division of tasks between the active resources of the production line was based on fixed rules, and both humans and robots performed high-frequency repetitive operations [2]. The allocation of tasks between the human and the robot primarily aims to follow the criteria that satisfy the respective capabilities of the individual resources. Attention must be given to the kind of resources used based on their competence and capabilities [3]. At a deterministic level, HRC deals with the paradigm of shared sequential task execution between the human and the robot. As shown in Figure 1, a task sequence comprising n = five operations is distributed between the human (H) and the robot (R). The human performs tasks k2, k3 and k4, while the robot performs tasks J1, and J5.
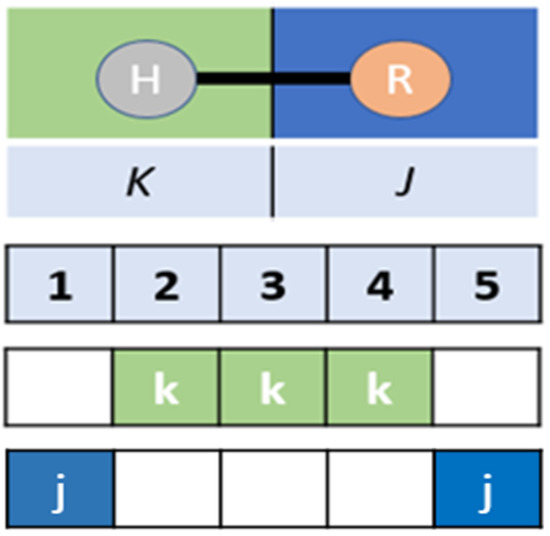
Figure 1. Task allocation between the human and robot.
Current shared industrial workplaces bring numerous uncertainties that cannot be anticipated with rigid automation. Co-operation-based assembly through task sharing using human intelligence for decision making and robots for accurate execution is critical for workload planning in the production environment [4][5]. Task allocation problems in assembly, commonly known as the assembly line balancing problem (ALBP), emerge when the assembly process must be redesigned based on optimization criteria for the proper re-assigning of tasks [3][6].
Several modeling tools are available for solving the task sequence problem. Difficulty score sheets in design for assembly (DFA) were used in [7][8] to provide a good understanding of the attributes that affect the human–robot task assignment. The concept of dynamic function allocation was studied in [9] to resolve the problem of an unbalanced workload by changing the levels of human/machine controls over system functions, which lead into more situational awareness of human factors in automation. The authors in [10] proposed the disassembly sequence planning model that is capable of minimizing the disassembly time without violating the human safety and the resources constraints.
In solving the task allocation problem in the design phase, the authors in [11] used the nominal schedule to best distribute the work among actors. Following an AND/OR graph, the scheduler is capable of allocating the most suitable task for each actor to execute at each point in time, whereby human expertise is exploited to improve the collaboration. While most studies consider the single human–robot collaborative system, Liau and Ryu [12] studied two different HRC modes, namely, multi-station and flexible modes. Through simulation, they proposed a three-level task allocation model to improve the cycle time, human capability and ergonomic factors.
Beyond the suitability of the task distribution strategy, the capability of the HRC system and the optimization of the assembly cycle time and line balancing can also be studied if an appropriate task allocation model demonstrates sufficient levels of situational awareness. This assigns adjustable roles to the active resources in a manner that determines the limits of acceptable physical work requirements. Furthermore, the design of task allocation that ignores the human factors can lead to economic costs associated with health damage and the loss of productivity due to absenteeism [13].
2. Ergonomics in Collaborative Assembly
The requirement of integrating the human factors in operations involving manual material handling has become a growing trend in research. In the effort to involve human analysis in collaborative work design, ergonomics focuses on the human physical and cognitive characteristics and describe the science of designing appropriate working conditions [6]. There are two key aspects considered below: occupational health and safety.
3. Intelligent Controllers
Assembly operations that involve humans can be characterized by the random and uncertain behavior of the agents involved. This leads to unpredictable changes in the occurrence of events over time. In this probabilistic context, the collaborative state must be continuously integrated into the system’s response in terms of both what to execute and when to execute it.
4. Optimization Techniques
Manual operations cannot satisfy the demand for repeated human movements under load in collaborative assembly. Therefore, mathematical models could provide guidelines for making effective decisions within the current insufficient knowledge of the shared assembly tasks. Indeed, assembly task planning can be categorized as a particular optimization problem. One of the challenges in collaborative operations is the minimization of the cycle time, irrespective of the variability of the manual processing time in executing the assembly tasks as compared to automation [14]. When it comes to manufacturing, the first problem is concerned with task allocation and modeling, for which mathematical models and computer languages can provide the quantitative description of tasks to be performed [1]. The optimization of task allocation considering various modalities such as the part geometry, robot model and kinematics, as shown in Figure 2.
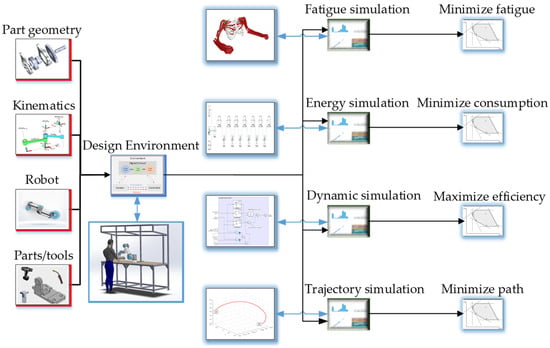
Figure 2. Optimization planning of task allocation for human–robot collaboration. Multi-criteria optimization for minimizing the human fatigue, energy consumption and path and maximizing efficiency.
Adding new constraints to a single-board problem based on constraint programming (CP) is easier to develop and more readable when compared to mixed-integer linear programming (MILP) [15]. The authors’ comparison between MILP and CP revealed that CP offers a superior computational performance for the ALBP of printed circuit boards comprising between 60 and 200 tasks. The authors in [16] proposed an online estimation of the quality of interaction between a human and a robot. Through the computation of fluency metrics, the authors measured the contribution of the human to the interaction. Zhang, Lv [2] used reinforcement learning to optimize the task sequence allocation in the HRC assembly process. A visual interface displays the assembly sequence to the operators to obey the decision of the human agent. The authors in [17] evaluated multiple criteria such as resources availability, suitability and processing time, which they integrated with a modular framework where the individual agents communicate over an ROS-based architecture.
Weckenborg, Kieckhäfer [18] developed a genetic algorithm to minimize the assembly lines’ cycle times for a given number of stations with collaborative robots. Stecke and Mokhtarzadeh [19] presented a use case of an assembly task of a base shaft module to demonstrate the impact of robot mobility on the performance of a hybrid assembly line. The authors used an energy expenditure model to analyze the advantages of collaborative robots in assembly lines. A combination of mixed-integer programming, constraint programming and a bender decomposition algorithm reveals that the configuration for equipping an assembly line with a robot is best when the ratio of robots over the station is near 0.7, with 37% of mobile robots.
The implementation of a multi-modal interface for the fusion of different communication methods such as voice and gesture commands is well reported for the robust human–robot control architecture in manufacturing systems [20][21][22]. However, solutions based on speech recognition face numerous limitations such as the noise in the environment that is characteristic of a real production line. In summary, human and robot characteristics are often considered similar from mathematical and computer modeling perspectives [23]. A summary of the optimization methods reported in the literature for assembly task planning in HRC is captured in Table 1.
Beyond the computational complexity of mathematical modeling approaches and the use of cumbersome data acquisition methods such as direct EMG signals, alternative solutions to assembly systems design such as the virtualization [24] and visualization [25] of manufacturing processes have emerged in recent years. These tools have received growing interest in improving the product design for collaborative assembly for their non-reliance on physical set-ups and the associated reduction in safety risks.
Table 1. Optimization methods for HRC in the recent literature.
| Year | Ref. | Description/Title | ALBP | AD | MM | OT | Key Feature |
|---|---|---|---|---|---|---|---|
| 2018 | [26] | Robot adaptation to human physical fatigue in human–robot co-manipulation |
✔ | DMP | Proposes a new human fatigue model in HRC based on the measurement of EMG signals. | ||
| 2019 | [27] | Sequence Planning Considering Human Fatigue for Human–Robot Collaboration in Disassembly | ✔ | ✔ | ✔ | DBA | Solved the sequence planning considering human fatigue in human–robot collaboration using a bee algorithm. |
| 2019 | [28] | A selective muscle fatigue management approach to ergonomic human–robot co-manipulation | ✔ | ML | Performed experiments on two different HRC tasks to estimate individual muscle forces to learn the relationship between the given configuration and endpoint force inputs and muscle force outputs. |
||
| 2020 | [29] | Mathematical model and bee algorithms for the mixed-model assembly line balancing problem with physical human–robot collaboration |
✔ | ✔ | ✔ | MILP BA ABC |
The authors presented a mixed-model assembly line balancing problem using a combination of MILP, BA and ABC algorithms. To this end, the proposed model and algorithm offer a new line design for increasing the assembly line efficiency. |
| 2020 | [30] | Bound-guided hybrid estimation of the distribution algorithm for energy-efficient robotic assembly line balancing |
✔ | ✔ | ✔ | BGS | The authors proposed a bounded guided sampling method as a multi-objective mathematical model for solving the problem of the energy efficiency of robotic assembly line balancing. |
| 2020 | [15] | Scheduling of human–robot collaboration in the assembly of printed circuit boards: a constraint programming approach |
✔ | ✔ | ✔ | MILP CP |
A comparison between MILP and CP reveals that CP offers a superior computational performance for ALBP, comprising between 60 and 200 task. |
| 2020 | [18] | Balancing of assembly lines with collaborative robots | ✔ | ✔ | ✔ | MILP GA |
The authors developed a genetic algorithm to minimize the assembly lines’ cycle times for a given number of stations with collaborative robots. |
| 2021 | [19] | Balancing collaborative human–robot assembly lines to optimize the cycle time and ergonomic risk | ✔ | ✔ | ✔ | MILP CP BD |
Human–robot collaboration was studied for sensitivity analysis. MILP, CP and BD algorithms were developed to analyze the benefits of human–robot collaboration in assembly lines. To this end, regression lines can help managers determine how many robots should be used for a line. |
| 2022 | [2] | A reinforcement learning method for human–robot collaboration in assembly tasks |
✔ | ✔ | ✔ | RL | The use of reinforcement learning to optimize the task sequence allocation in the HRC assembly process. A visual interface displays the assembly sequence to the operators to obey the decision of the human agent. |
| 2022 | [31] | A dynamic task allocation strategy for mitigating the human physical fatigue in collaborative robotics | ✔ | ✔ | ✔ | DNN | A non-intrusive online fatigue algorithm that predicts the joint muscle activation associated with the human motion. The estimation process allocates the task activities based on a sophisticated musculoskeletal model and a 3D vison system that tracks the human motion in real time. |
| 2022 | [32] | Development of an integrated virtual reality system with wearable sensors for the ergonomic evaluation of human–robot cooperative workplaces | ✔ | Ergonomic analysis strategy of humans in the loop virtual reality technology. The system uses a mixed- prototyping strategy involving a VR environment, computer–aided design (CAD) objects, wearable sensors and human subjects. |
Notes—ALBP: Assembly line balancing problem; AD: Algorithm development; MM: Mathematical modeling; OT: Optimization tool; DMP: Dynamic movement primitive; DBA: Discrete bee algorithm; ML: Machine learning; MILP: Mixed-integer linear programming; BA: Bee algorithm; ABC: Artificial bee colony; BGS: Bounded guided sampling; CP: Constraint programming; GA: Genetic algorithm; BD: Bender decomposition; RL: Reinforcement learning; DNN: Deep neural network.
5. Digital Interface
Previous research has focused on using computer modeling to better identify the system requirements for human–machine task analysis. A way to quickly and safely design and test a manufacturing process such as HRC is by utilizing a virtual space. In Hernández, Sobti [33], motion planning in an augmented reality (AR) interface increased the robot’s autonomy and decision-making capabilities, thereby allowing the human to make more general and open requests. Matsas, Vosniakos [34] positively judged the application of virtual reality (VR) for the experimentation of complex interaction metaphors, especially for the use of cognitive aids.
The experiments in [35] demonstrated the feasibility of pHRI through a VR approach in which the operator achieves the necessary comfort functions. Computer simulation is also used to map a digital counterpart of an HRC work environment in [36][37]. Digital twins help establish each entity in the virtual space, whereby the physical assembly space is driven by real-time simulation, analysis and decision making of the mapping process [20].
Malik, Masood [5] developed a unified framework for integrating human–robot simulation with VR as an event-driven simulation to estimate the H–R cycle times and develop a process plan, layout optimization and robot control. Ji, Yin [38] presented a novel programming-free automated assembly planning and control approach based on virtual training. The variety of goals contained within an HRC assembly system requires special applications for the modeling, simulations and predictive visualization of the collaborative system’s performance. VR and AR offer the interface in which multiple scenarios and components can be configured and tested, as shown in Figure 3.
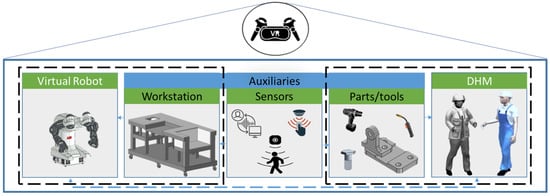
Figure 3. Components of a virtual HRC assembly design. CAD models of humans, collaborative robots and tools are imported into an immersive environment where interaction is enabled through sensors. Such environments allow for the relative safety of testing multiple interaction scenarios prior to physical set-ups.
With the widespread adoption of the digital human model (DHM), the realism and effectiveness of virtual manufacturing planning now enable the experiment of complex process assessments such as motion control and postures prediction. From the static postures of the DHM in the virtual environment, the designers can interpolate key postures to generate a continuous movement [39]. This can be achieved by inserting the anthropometric data of targeted users into a computer-generated environment for the virtual ergonomic evaluation of the human fit with the workstation [40][41].
The integration of biomechanical parameters enables the evaluation of various workload scenarios within the simulation of the DHM. Because it is impractical to infer all functions of a real human, DHMs are generated with simplified features according to specific needs. It may therefore be necessary to model a set of specific postures. During the planning of human–robot collaborative systems for the analysis of physical fatigue, a DHM is used as the complementary agent for the upper body motion study in the interaction with the virtual collaborative robot, as shown in Figure 4. Once the data from the iterative analysis of the postural risks Rxn at times Tn and the desired motion patterns are acquired, the computation of the training data follows for the robotic interaction controller that identifies the variation (∆) in motion patterns.
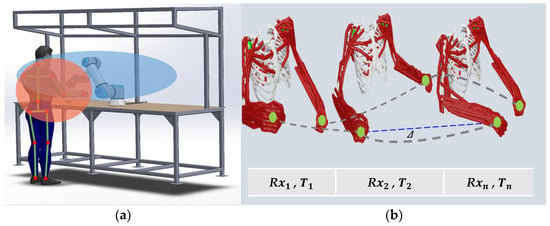
Figure 4. (a) Co-assembly areas of the human (orange) and robot (blue), (b) Biomechanical modeling of upper-body motion patterns. The motion patterns of the upper-body limbs are cataloged, and the visual controller can evaluate the deviations from the prescribed path(s) in both space and time.
Given the stream of continuous movements that moving systems exhibit during their daily routine, a fundamental question that remains is to determine the initial blocks that, looped together, build and execute the motion controls of both artificial and biological entities [42]. The authors in [4] discuss the previous limitation of simulation software for collaborative assembly lines to the modeling of plain action sequences. Progress in virtual technology now enables 3D simulation to automatically generate a work cell with the allocation of tasks between the human and the robot resources [43]. The conceptual simulation in [12] improved the cycle time, ergonomic factor and human utilization in the collaboration modes presented and proved the possibility of HRC application in the mold assembly.
The authors in [32] proposed a novel collaborative assembly design strategy based on virtual reality for ergonomic assessment. The system was made up of four key components: virtual reality devices for the human immersion and interaction, a robotic simulator for modeling the robot in the working environment, surface EMG sensors and accelerometers for measuring the human ergonomic status. After applying the system to a real industrial use-case related to a human–robot task in the automotive industry, it was found that the methodology can effectively be applied in the analysis of physical conditions in human–robot interaction. This was to endow the co-worker with self–awareness with respect to their ergonomic status and safety conditions while the co-worker directly performs the task in the immersive virtual environments. A similar virtual collaborative task-planning set-up is shown in Figure 5.
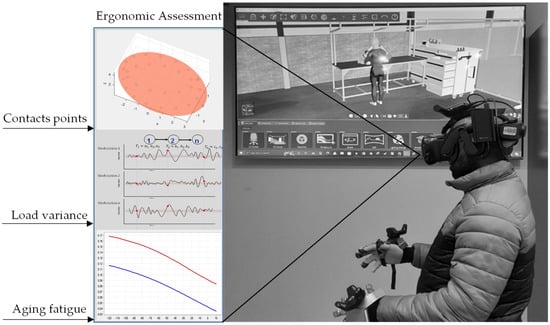
Figure 5. Virtual collaborative assembly design. The development is performed at the X-Reality Lab, RMCERI, Department of Industrial Engineering, TUT. The protocols are designed to enable the co-operator to view the ergonomic characteristics of the assembly task in terms of the contact points in space between the human, the robot and the product, the load variance at various execution times and the aging energy level.
Given the recent development in the fields of vision sensors, VR as a synthetic environment can be used to handle some of the engineering and testing problems in machine vision (MV). It has become possible to develop frameworks for human–robot teams to work collaboratively through gesture recognition [44]. A priori, virtual reality and computer vision may seem to be research areas in HRC, with opposite objectives. Yet, human situational parameters can be monitored with fixed systems such as cameras, and through cognitive enablers, smart actuators can provide triggers to change the system state (flow) if the operator pace is downgrading due to fatigue [45]. In the simulated environment, MV provides the enablers needed to implement intelligent creatures within the virtual environment. In the immersive test environment, MV captures the sensing information of the real human in terms of movement pace. Then, the behavior of the virtual robot is positioned and arranged as the human situation changes.
References
- Cheng, Y.; Sun, F.; Zhang, Y.; Tao, F. Task allocation in manufacturing: A review. J. Ind. Inf. Integr. 2019, 15, 207–218.
- Zhang, R.; Lv, Q.; Li, J.; Bao, J.; Liu, T.; Liu, S. A reinforcement learning method for human-robot collaboration in assembly tasks. Robot. Comput. -Integr. Manuf. 2022, 73, 102227.
- Koltai, T.; Dimény, I.; Gallina, V.; Gaal, A.; Sepe, C. An analysis of task assignment and cycle times when robots are added to human-operated assembly lines, using mathematical programming models. Int. J. Prod. Econ. 2021, 242, 108292.
- Antakli, A.; Spieldenner, T.; Rubinstein, D.; Spieldenner, D.; Herrmann, E.; Sprenger, J.; Zinnikus, I. Agent-based Web Supported Simulation of Human-robot Collaboration. In Proceedings of the 15th International Conference on Web Information Systems and Technologies, WEBIST, Vienna, Austria, 18–20 September 2019.
- Malik, A.A.; Masood, T.; Bilberg, A. Virtual reality in manufacturing: Immersive and collaborative artificial-reality in design of human-robot workspace. Int. J. Comput. Integr. Manuf. 2020, 33, 22–37.
- Mura, M.D.; Dini, G. Optimizing ergonomics in assembly lines: A multi objective genetic algorithm. CIRP J. Manuf. Sci. Technol. 2019, 27, 31–45.
- Tram, A.V.N.; Raweewan, M. Optimal Task Allocation in Human-Robotic Assembly Processes. In Proceedings of the 2020 5th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 20–22 November 2020; IEEE: Piscataway, NJ, USA, 2020.
- Malik, A.A.; Bilberg, A. Complexity-based task allocation in human-robot collaborative assembly. In Industrial Robot: The International Journal of Robotics Research and Application; Emerald Group Publishing: Bingley, UK, 2019.
- Atashfeshan, N.; Saidi-Mehrabad, M.; Razavi, H. A novel dynamic function allocation method in human-machine systems focusing on trigger mechanism and allocation strategy. Reliab. Eng. Syst. Saf. 2021, 207, 107337.
- Lee, M.-L.; Behdad, S.; Liang, X.; Zheng, M. Task allocation and planning for product disassembly with human–robot collaboration. Robot. Comput.-Integr. Manuf. 2022, 76, 102306.
- Pupa, A.; Van Dijk, W.; Brekelmans, C.; Secchi, C. A Resilient and Effective Task Scheduling Approach for Industrial Human-Robot Collaboration. Sensors 2022, 22, 4901.
- Liau, Y.Y.; Ryu, K. Genetic algorithm-based task allocation in multiple modes of human–robot collaboration systems with two cobots. Int. J. Adv. Manuf. Technol. 2022, 119, 7291–7309.
- Mura, M.D.; Dini, G. Job rotation and human–robot collaboration for enhancing ergonomics in assembly lines by a genetic algorithm. Int. J. Adv. Manuf. Technol. 2021, 118, 2901–2914.
- Casalino, A.; Zanchettin, A.M.; Piroddi, L.; Rocco, P. Optimal scheduling of human–robot collaborative assembly operations with time petri nets. IEEE Trans. Autom. Sci. Eng. 2019, 18, 70–84.
- Mokhtarzadeh, M.; Tavakkoli-Moghaddam, R.; Vahedi-Nouri, B.; Farsi, A. Scheduling of human-robot collaboration in assembly of printed circuit boards: A constraint programming approach. Int. J. Comput. Integr. Manuf. 2020, 33, 460–473.
- Mayima, A.; Clodic, A.; Alami, R. Toward a Robot Computing an Online Estimation of the Quality of its Interaction with its Human Partner. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020.
- Tsarouchi, P.; Matthaiakis, A.-S.; Makris, S.; Chryssolouris, G. On a human-robot collaboration in an assembly cell. Int. J. Comput. Integr. Manuf. 2017, 30, 580–589.
- Weckenborg, C.; Kieckhäfer, K.; Müller, C.; Grunewald, M.; Spengler, T.S. Balancing of assembly lines with collaborative robots. Bus. Res. 2020, 13, 93–132.
- Stecke, K.E.; Mokhtarzadeh, M. Balancing collaborative human–robot assembly lines to optimise cycle time and ergonomic risk. Int. J. Prod. Res. 2021, 60, 25–47.
- Wang, L.; Gao, R.; Váncza, J.; Krüger, J.; Wang, X.V.; Makris, S.; Chryssolouris, G. Symbiotic human-robot collaborative assembly. CIRP Ann. 2019, 68, 701–726.
- Liu, H.; Fang, T.; Zhou, T.; Wang, L. Towards robust human-robot collaborative manufacturing: Multimodal fusion. IEEE Access 2018, 6, 74762–74771.
- Maurtua, I.; Fernandez, I.; Tellaeche, A.; Kildal, J.; Susperregi, L.; Ibarguren, A.; Sierra, B. Natural multimodal communication for human–robot collaboration. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417716043.
- Hashemi-Petroodi, S.E.; Thevenin, S.; Kovalev, S.; Dolgui, A. Operations management issues in design and control of hybrid human-robot collaborative manufacturing systems: A survey. Annu. Rev. Control 2020, 49, 264–276.
- Dianatfar, M.; Latokartano, J.; Lanz, M. Review on existing VR/AR solutions in human–robot collaboration. Procedia CIRP 2021, 97, 407–411.
- Xia, P.; Lopes, A.M.; Restivo, M.T. A review of virtual reality and haptics for product assembly (part 1): Rigid parts. Assem. Autom. 2013, 33, 68–77.
- Peternel, L.; Tsagarakis, N.; Caldwell, D.; Ajoudani, A. Robot adaptation to human physical fatigue in human–robot co-manipulation. Auton. Robot. 2018, 42, 1011–1021.
- Li, K.; Liu, Q.; Xu, W.; Liu, J.; Zhou, Z.; Feng, H. Sequence planning considering human fatigue for human-robot collaboration in disassembly. Procedia CIRP 2019, 83, 95–104.
- Peternel, L.; Fang, C.; Tsagarakis, N.; Ajoudani, A. A selective muscle fatigue management approach to ergonomic human-robot co-manipulation. Robot. Comput.-Integr. Manuf. 2019, 58, 69–79.
- Çil, Z.A.; Li, Z.; Mete, S.; Özceylan, E. Mathematical model and bee algorithms for mixed-model assembly line balancing problem with physical human–robot collaboration. Appl. Soft Comput. 2020, 93, 106394.
- Sun, B.-Q.; Wang, L.; Peng, Z.Q. Bound-guided hybrid estimation of distribution algorithm for energy-efficient robotic assembly line balancing. Comput. Ind. Eng. 2020, 146, 106604.
- Messeri, C.; Bicchi, A.; Zanchettin, A.M.; Rocco, P. A Dynamic Task Allocation Strategy to Mitigate the Human Physical Fatigue in Collaborative Robotics. IEEE Robot. Autom. Lett. 2022, 7, 2178–2185.
- Caporaso, T.; Grazioso, S.; Di Gironimo, G. Development of an integrated virtual reality system with wearable sensors for ergonomic evaluation of human–robot cooperative workplaces. Sensors 2022, 22, 2413.
- Hernández, J.D.; Sobti, S.; Sciola, A.; Moll, M.; Kavraki, L.E. Increasing Robot Autonomy via Motion Planning and an Augmented Reality Interface. IEEE Robot. Autom. Lett. 2020, 5, 1017–1023.
- Matsas, E.; Vosniakos, G.C.; Batras, D. Effectiveness and acceptability of a virtual environment for assessing human–robot collaboration in manufacturing. Int. J. Adv. Manuf. Technol. 2017, 92, 3903–3917.
- Shu, B.; Sziebig, G.; Pieskä, S. Human-robot collaboration: Task sharing through virtual reality. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Piscataway, NJ, USA, 2018.
- Malik, A.A.; Brem, A. Digital twins for collaborative robots: A case study in human-robot interaction. Robot. Comput.-Integr. Manuf. 2021, 68, 102092.
- Wang, Y.; Feng, J.; Liu, J.; Liu, X.; Wang, J. Digital Twin-based Design and Operation of Human-Robot Collaborative Assembly. IFAC-Pap. 2022, 55, 295–300.
- Ji, W.; Yin, S.; Wang, L. A virtual training based programming-free automatic assembly approach for future industry. IEEE Access 2018, 6, 43865–43873.
- Zhu, W.; Fan, X.; Zhang, Y. Applications and research trends of digital human models in the manufacturing industry. Virtual Real. Intell. Hardw. 2019, 1, 558–579.
- Maurya, C.M.; Karmakar, S.; Das, A.K. Digital human modeling (DHM) for improving work environment for specially-abled and elderly. SN Appl. Sci. 2019, 1, 1326.
- Matsas, E.; Vosniakos, G.-C. Design of a virtual reality training system for human–robot collaboration in manufacturing tasks. Int. J. Interact. Des. Manuf. 2017, 11, 139–153.
- Schaal, S. Dynamic movement primitives-a framework for motor control in humans and humanoid robotics. In Adaptive Motion of Animals and Machines; Springer: Berlin/Heidelberg, Germany, 2006; pp. 261–280.
- Tsarouchi, P.; Michalos, G.; Makris, S.; Athanasatos, T.; Dimoulas, K.; Chryssolouris, G. On a human–robot workplace design and task allocation system. Int. J. Comput. Integr. Manuf. 2017, 30, 1272–1279.
- Shukla, D.; Erkent, Ö.; Piater, J. Learning semantics of gestural instructions for human-robot collaboration. Front. Neurorobotics 2018, 12, 7.
- Cimini, C.; Pirola, F.; Pinto, R.; Cavalieri, S. A human-in-the-loop manufacturing control architecture for the next generation of production systems. J. Manuf. Syst. 2020, 54, 258–271.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
750
Revisions:
2 times
(View History)
Update Date:
28 Mar 2023
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No