 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Yi Han | -- | 4465 | 2022-11-23 03:17:58 | | | |
| 2 | Lindsay Dong | -1 word(s) | 4464 | 2022-11-23 09:41:39 | | |
Video Upload Options
Intelligent connected vehicle formation is mainly for more intelligent snatched vehicles in a complex traffic environment. By adjusting their driving speed and steering, it makes itself and nearby intelligent connected vehicles keep relatively stable geometric posture and the same movement, and meets the task requirements and constraints (such as obstacle avoidance), so as to realize more intelligent connected vehicles between wireless communication collaborative driving behavior. The main technologies involved in the autonomous vehicle formation include: vehicle combination positioning and multi-sensor and multi-source information fusion technology, collaborative formation control technology, and cooperative perception and communication technology.
1. Introduction
The direction of automobile development is intelligent and networked. Intelligence includes the perception, decision making, and control of intelligent cars. Car intelligence is usually through the radar system (laser radar, millimeter wave radar, and ultrasonic radar) and visual system (camera) to collect the surrounding environment, and then through the vehicle computer and algorithm for data processing, it makes the optimal decision, the decision signal goes to the vehicle chassis control system, and the intelligent control is realized [1]. Networking refers to the function of communication and real-time information between the network environment and real-time information interaction, which can be divided into vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N), and vehicle-to-pedestrian (V2P). An intelligent connected vehicle generally refers to a single vehicle to achieve intelligence through sensor technology. At present, in order to improve the safety and comfort of intelligent vehicles, intelligent connected vehicles, in addition to directly perceiving the environment to make decisions, also need to have the ability to cooperate and act, and reflect the advantages of multi-vehicle intelligence through the cooperation and coordination of vehicle to vehicle [2].
In the development and advancement in vehicle-to-everything (V2X) technologies, including vehicle-to-vehicle communication technologies and vehicle and roadside infrastructure communication technologies, collaborative vehicle infrastructure systems (CVIS) and information factors play an increasingly important role in transportation systems [3][4][5]. Intelligent collaborative vehicle control based on vehicle–road cooperation will enable all-round information sensing and compensate for the lack of on-board computing power, which is a future direction in this field. Under the conditions of intelligent networks, vehicles on the road are no longer isolated individuals but multi-vehicle systems formed by wireless communication networks. In the vehicle network environment, intelligent vehicles can obtain information about other vehicles and roads within the communication range based on workshop communication and vehicle–road communication, and they use this information for distributed decision making and control in order to realize the collaborative control of the whole system.
2. Cooperative Control
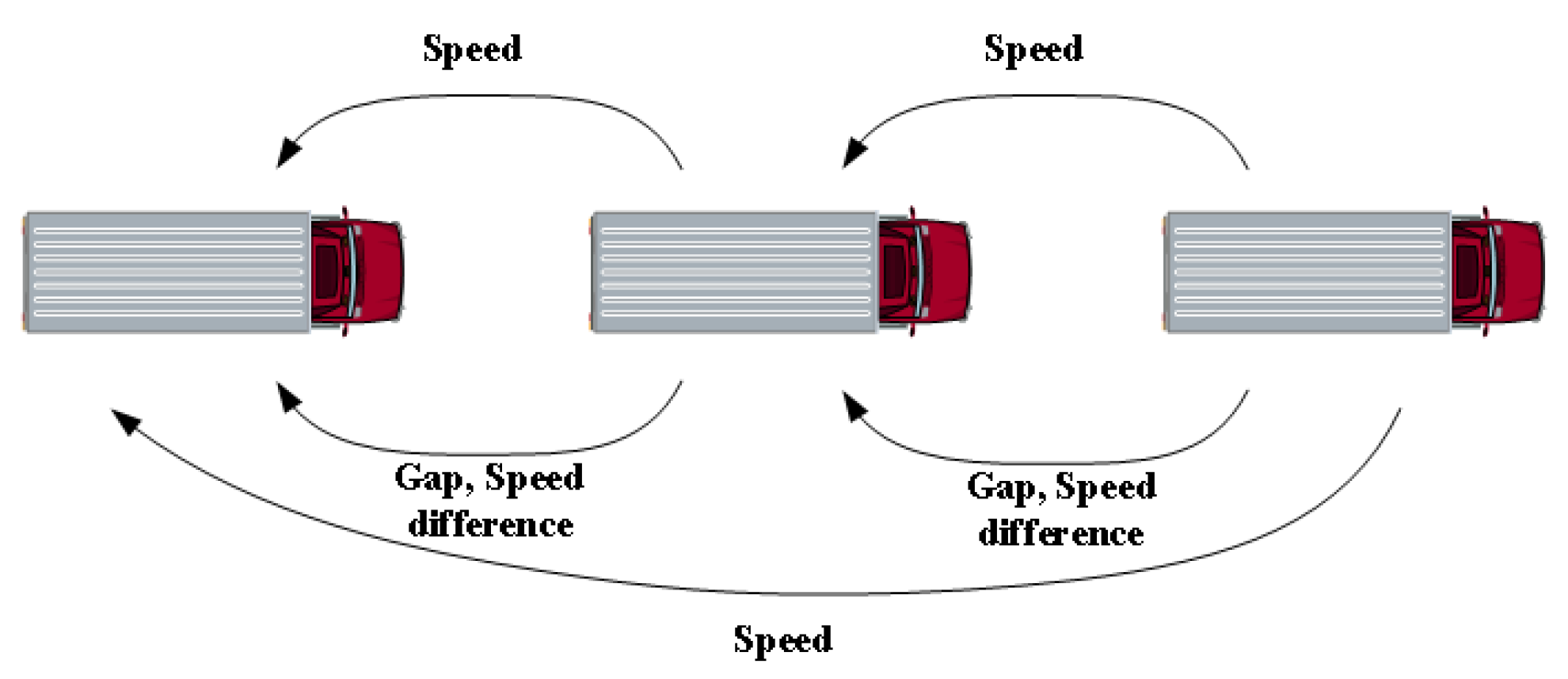
2.1. Vertical Formation
2.2. Vehicle Collaborative Decision-Making and Control Strategy
2.3. Collaborative Positioning
3. Vehicle Communication
3.1. Communication Security
3.2. Control Strategy for Communication Delay
4. Test Method and Evaluation
4.1. Real Vehicle Road Test Platform
4.2. Virtual Test Platform
4.3. Test Method and Evaluation
References
- Zhao, J.; Song, D.; Zhu, B.; Liu, B.; Chen, Z.; Zhang, P. Intelligent car following control strategy based on the hybrid drive of self-learning and supervised learning. J. Highw. China 2022, 35, 55–65.
- Autonomous Driving Working Committee of China Highway Society. Development Trend and Suggestions of vehicle-road collaborative autonomous driving. Intell. Connect. Car 2019, 4, 50–60.
- Daganzo, C.; Lehe, L. Traffic flow on signalized streets. Transport. Res. B-Meth. 2016, 90, 56–69.
- Evers, R.; Proost, S. Optimizing intersections. Transport. Res. B-Meth. 2015, 71, 100–119.
- Wong, S.; Sze, N.; Li, Y. Contributory factors to traffic crashes at signalized intersections in Hong Kong. Accid. Anal. Prev. 2007, 39, 1107–1113.
- Biswas, S.; Tatchikou, R.; Dion, F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Commun. Mag. 2006, 44, 74–82.
- Rangesh, A.; Trivedl, M. No blind spots: Full-surround multi-object tracking for autonomous vehicles using cameras and lidars. IEEE Trans. Intell. Veh. 2019, 4, 588–599.
- Pan, C.; Huang, A.; Chen, L. A review of the development trend of adaptive cruise control for ecological driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 1931–1948.
- Calvert, S.C.; van Arem, B. Cooperative adaptive cruise control and intelligent traffic signal interaction: A field operational test with platooning on a suburban arterial in real traffic. IET Intell. Transp. Syst. 2020, 14, 1665–1672.
- Isaac, O.; Lagouge, K.; Modestus, O.; Alessandro, S. Comparative Traffic Flow Prediction of a Heuristic ANN Model and a Hybrid ANN-PSO Model in the Traffic Flow Modelling of Vehicles at a Four-Way Signalized Road Intersection. Sustainability 2021, 13, 10704.
- Myungeun, E.; Byung-In, K. The traffic signal control problem for intersections: A review. Eur. Transp. Res. Rev. 2020, 12, 50.
- Dresner, K.; Stone, P. A multiagent approach to autonomous intersection management. J. Artif. Intell. Res. 2018, 31, 591–656.
- Rosolia, U.; Bruyne, D.; Alleyne, A.G. Autonomous vehicle control: A nonconvex approach for obstacle avoidance. IEEE Trans. Control. Syst. Technol. 2016, 25, 469–484.
- Galceran, E.; Cunningham, A.G.; Eustice, R.M.; Olson, E. Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction: Theory and experiment. Auton. Robot. 2017, 41, 1367–1382.
- Chen, L.; Englund, C. Cooperative intersection management: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 17, 570–586.
- Levin, M.W.; Boyles, S.D.; Patel, R. Paradoxes of reservation-based intersection controls in traffic networks. Transp. Res. Part A Policy Pract. 2016, 90, 14–25.
- Jablonský, J. Benchmarks for current linear and mixed integer optimization solvers. Acta Univ. Agric. Silvic. Mendel. Brun. 2015, 63, 1923–1928.
- Zhou, Y.; Ahn, S.; Chitturi, M.; Noyce, D.A. Rolling horizon stochastic optimal control strategy for ACC and CACC under uncertainty. Transp. Res. Part C Emerg. Technol. 2017, 83, 61–76.
- Li, Z.; Pourmehrab, M.; Elefteriadou, L.; Ranka, S. Intersection control optimization for automated vehicles using genetic algorithm. J. Transp. Eng. Part A Syst. 2018, 144, 04018074.
- Wu, J.; Abbas-Turki, A.; Moudni, A.E. Cooperative driving: An ant colony system for autonomous intersection management. Appl. Intell. 2012, 37, 207–222.
- Ying, Z.B.; Ma, M.; Yi, L. Bavpm: Practical autonomous vehicle platoon management supported by blockchain technique. In Proceedings of the 2019 4th International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 5–7 September 2019; pp. 256–260.
- Orujov, F.; Maskeliunas, R.; Damasevicius, R.; Wei, W.; Li, Y. Smartphone based intelligent indoor positioning using fuzzy logic. Future Gener. Comput. Syst. 2018, 89, 335–348.
- Liu, J.; Cai, B.; Wang, J. Cooperative Localization of Connected Vehicles: Integrating GNSS With DSRC Using a Robust Cubature Kalman Filter. IEEE Trans. Intell. Transp. Syst. 2017, 18, 111–2125.
- Zeng, Q.; Liu, J.; Hu, Q.; Yang, D. The Beidou system and GNSS multi-constellation combination navigation performance research. Glob. Position. 2011, 36, 53–57.
- Odolinski, R.; Teunissen, P.J.G. Low-cost, high-precision, single-frequency GPS–BDS RTK positioning. GPS Solut. 2017, 21, 1315–1330.
- Yang, L.; Li, B.; Lou, L. Effect of different tropospheric models on the GPS localization results. Surv. Mapp. Bull. 2009, 4, 9–11.
- Milford, M.J.; Wyeth, G.F. Single camera vision-only SLAM on a suburban road network. In Proceedings of the Robotics and Automation IEEE, Pasadena, CA, USA, 19–23 May 2008; pp. 3684–3689.
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163.
- MPalzkill, T.; Ledermann, A. Verl. Anticipation-Preprocessing for Object Pose Detection. In Proceedings of the ISR 2010 and ROBOTIK 2010, Munich, Germany, 7–9 June 2010; pp. 1–6.
- Brand, C.; Schuster, M.J.; Hirschmüller, H.; Suppa, M. Submap matching for stereo-vision based indoor/outdoor slam. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5670–5677.
- Wang, L.; Zhang, Y.; Wang, J. Map-based localization method for autonomous vehicles using 3D-LIDAR. IFAC-Pap. 2017, 50, 276–281.
- Javanmardi, E.; Gu, Y.; Javanmardi, M.; Kamijo, S. Autonomous vehicle self-localization based on abstract map and multi-channel Li DAR in urban area. IATSS Res. 2019, 43, 1–13.
- Magnusson, M.; Andreasson, H.; Nüchter, A.; Lilienthal, A.J. Automatic appearance-based loop detection from three-dimensional laser data using the normal distributions transform. J. Field Robot. 2009, 26, 892–914.
- Fontana, R.J. Recent system applications of short-pulse ultra-wideband (UWB) technology. IEEE Trans. Microw. Theory Tech. 2004, 52, 2087–2104.
- Parwari, N.; Joshua, N.A.; Kyperountas, S. Locating the Nodes-Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–59.
- Oppermann, I.; Yu, K.; Montillet, J.P.; Rabbachin, A.; Cheong, P. UWB Location and Tracking for Wireless Embedded Networks. Signal Process. 2006, 86, 2153–2171.
- Rohani, M.; Gingras, D.; Vigneron, V.; Gruyer, D. A new decentralized Bayesian approach for cooperative vehicle localization based on fusion of GPS and inter-vehicle distance measurements. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo, Las Vegas, NV, USA, 2–6 December 2013.
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit cooperative positioning in vehicular networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3980.
- Ansari, K.; Feng, Y.; Tang, M. A runtime integrity monitoring framework for real-time relative positioning systems based on GPS and DSRC. IEEE Trans. Intell. Transp. Syst. 2015, 16, 980–992.
- Xiong, J.; Cheong, J.W.; Xiong, Z.; Dempster, A.G.; Tian, S.; Wang, R. Integrity for multi-sensor cooperative positioning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 792–807.
- Liu, J.; Tan, S.; Cai, B.; Wang, J. Based on Vehicle-Road information interaction. Transportation System Engineering and Information. 2022. Available online: https://kns.cnki.net/kcms/detail/11.4520.U.20220811.1444.008.html (accessed on 7 August 2022).
- Yao, H.; Feng, F.; Chen, J. Practical Application of Vehicle⁃Road Cooperation Based on High Precision Map and Multi⁃sensor Fusion Positioning. J. Geomat. 2022, 47, 65–69.
- Wei, W.; Liu, S.; Li, W.; Du, D.Z. Fractal Intelligent Privacy Protection in Online Social Network Using Attribute-Based Encryption Schemes. IEEE Trans. Comput. Soc. Syst. 2018, 6, 189.
- Damaševičius, R.; Woźniak, M.; Alarcon-Aquino, V.; Ganchev, I.; Wei, W. Advances in security and privacy of multimodal interfaces. J. Univers. Comput. Sci. 2018, 24, 338–340.
- Sun, X.; Yu, F.; Zhang, P.; Xie, W.X.; Peng, X. A survey on secure computation based on homomorphic encryption in vehicular Ad Hoc networks. Sensors 2020, 20, 4253.
- Liu, Y.; Lang, X.; Pei, S. Encryption algorithm based on ECC and homomorphic encryption. Comput. Eng. Des. 2020, 41, 1243–1247.
- Wei, X.; Lu, D. Forward secure aggregated signature scheme based on Chinese Remainder Theorem. Comput. Technol. Dev. 2021, 31, 137–141.
- Abbasian Dehkordi, S.; Farajzadeh, K.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K.; Dehkordi, M.A. A survey on data aggregation techniques in IoT sensor networks. Wirel. Netw. 2020, 26, 1243–1263.
- Boudia, O.; Senouci, M. An efficient and secure multidimensional data aggregation for fog computing-based smart grid. IEEE Internet Things J. 2020, 8, 6143–6153.
- Chen, L.; Zhou, J.; Chen, Y.; Cao, Z.F.; Dong, X.; Choo, K.K.R. PADP: Efficient privacypreserving data aggregation and dynamic pricing for vehicle to grid networks. IEEE Internet Things J. 2020, 8, 7863–7873.
- Xie, Y.; Xu, F.; Li, D.; Nie, Y. Efficient message authentication scheme with conditional privacy-preserving and signature aggregation for vehicular cloud network. Wirel. Commun. Mob. Comput. 2018, 2018, 1875489.
- Otomo, M.; Sato, G.; Shibata, Y. In-vehicle Cloudlet Computing System for Disaster Information Based on Delay Tolerant Network Protocol. In Proceedings of the 31st IEEE International Conference on Advanced Information Networking and Applications (IEEE AINA), Taipei, Taiwan, 27–29 March 2017.
- Zhao, H.; Zhu, Y.; Tang, J.; Han, Z.; Aujla, G.S. Message-Sensing Classified Processing and Transmission Scheme Based on Mobile Edge Computing in the Internet of Vehicles. Softw. Pract. Exper. 2020, 51, 2501–2518.
- Zeng, T.; Semiari, O.; Saad, W.; Bennis, M. Joint Communication and Control for Wireless Autonomous Vehicular Platoon Systems. IEEE Trans. Commun. 2019, 67, 7907–7922.
- Bahreini, M.; Zarei, J.; Razavi–Far, R.; Saif, M. Robust Finite-Time Stochastic Stabilization and Fault-Tolerant Control for Uncertain Networked Control Systems Considering Random Delays and Probabilistic Actuator Faults. Trans. Inst. Meas. Control. 2019, 41, 3550–3561.
- Tang, Y.; Peng, C.; Yin, S.; Qiu, J.B.; Gao, H.J.; Kaynak, O. Robust Model Predictive Control Under Saturations and Packet Dropouts With Application to Networked Flotation Processes. IEEE Trans. Autom. Sci. Eng. 2014, 11, 1056–1064.
- Zhang, L.; Xie, W.; Liu, J. Robust Control of Saturating Systems with Markovian Packet Dropouts under Distributed MPC. ISA Trans. 2019, 85, 49–59.
- Li, C.; Jing, H.; Wang, R.; Chen, N. Vehicle Lateral Motion Regulation under Unreliable Communication Links Based on Robust H∞ Output-Feedback Control Schema. Mech. Syst. Signal Process. 2018, 104, 171–187.
- Liu, T.Y.; Yu, Z.P.; Xiong, L.; Zhang, P. Development status and construction suggestions of intelligent Connected Vehicle Test ground. Auto. Technol. 2017, 1, 7–11.
- Zhang, W.; Li, X.H.; Wu, X.Y.; Tang, F.M.; Guo, P.; He, J. Research status of autonomous driving simulation technology. Auto Electric. 2019, 8, 13–15.
- Ministry of Industry and Information Technology; Ministry of Public Security; Ministry of Transport. Notice on the Issuance of the Management Code for Road Testing and Demonstration Application of Intelligent Connected Vehicles (Trial): The Ministry of Industry and Information Technology, No.97,2021. 21 July 2021. Available online: https://baike.baidu.com/item/Managementstandardforroadtestanddemonstrationapplicationofintelligentandconnectedvehicles/55766374?fr=aladdin (accessed on 1 January 2022).
- Changsha Municipal Bureau of Industry and Information Technology. Notice on the issuance of the Implementation Rules of Road Test Management of Intelligent and Connected Vehicle in Changsha City (Trial) V3.0: Changgongxin Digital Issue No. 77,2020. 18 June 2020. Available online: https://baike.baidu.com/item/ImplementationRulesforRoadTestofIntelligentandConnectedVehiclesinChangshaCity(Trial)/23790739?fr=aladdin (accessed on 14 June 2022).
- Varga, B.O.; Burnete, N.; Iclodean, C. Validation Procedure for Worldwide Harmonized Light Vehicles Test Cycle via Hardware in the Loop—Real Time Testing. In Proceedings of the 12th International Congress of Automotive and Transport Engineering (CONAT), Brasov, Romania, 26–29 October 2016.
- Zhang, L.; Du, Z.; Zhao, S.; Zhai, Y.; Shen, Y. Development and Verification of Traffic Confrontation Simulation Test Platform Based on PanoSim. In Proceedings of the 4th IEEE Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Electr, Network, 12–14 June 2020.
- Ortega, J.; Lengyel, H.; Szalay, Z. Overtaking maneuver scenario building for autonomous vehicles with PreScan software. Transport. Engi. 2020, 2, 100029.
- Ates, U. Long-Term Planning with Deep Reinforcement Learning on Autonomous Drones. In Proceedings of the 2020 Innovations in Intelligent Systems and Applications Conference (ASYU), Istanbul, Turkey, 15–17 October 2020.
- Li, G.F.; Yang, Y.F.; Zhang, T.R.; Qu, X.D.; Cao, D.P.; Cheng, B.; Li, K.Q. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios. Transport. Res. C-Emer. 2021, 122, 102820.
- Akhter, S.; Ahsan, N.; Quaderi, S.; Sumit, S.; Rahman, M. A sumo based simulation framework for intelligent traffic management system. Transport. Res. C-Emer. 2020, 8, 1–5.
- Song, Z.; Wang, H.; Sun, J.; Tian, Y. Experimental findings with VISSIM and TransModeler for evaluating environmental and safety impacts using micro-simulations. Transport. Res. Rec. 2020, 2674, 566–580.
- Szalai, M.; Varga, B.; Tettamanti, T.; Tihanyi, V. Mixed reality test environment for autonomous cars using Unity 3D and SUMO. In Proceedings of the 18th IEEE World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 23–25 January 2020.
- Vargas, J.; Alsweiss, S.; Jernigan, M.; Amin, A.; Brinkmann, M.; Santos, J.; Razdan, R. Development of Sensors Testbed for Autonomous Vehicles. In Proceedings of the IEEE SoutheastCon Conference, Huntsville, AL, USA, 11–14 April 2019.
- Wei, B.; Xiao, L.; Wei, W.; Song, Y.; Yan, B.C.; Huo, Z.S. A high-bandwidth and low-cost data processing approach with heterogeneous storage architectures. Pers. Ubiquit. Comput. 2020, 1–18.
- Zhu, B.; Zhang, P.; Zhao, J.; Chen, H.; Xu, Z.; Zhao, X.; Deng, W. Review of Scenario-Based Virtual Validation Methods for Automated Vehicles. China J. Highw. Transp. 2019, 32, 1–19.
- Kirovskii, O. Determination of Validation Testing Scenarios for an ADAS Functionality: Case Study. SAE Tech. Pap. 2019.
- Davision, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067.
- Guo, J.; Deng, W.; Zhang, S.; Qi, S.Q.; Li, X. A Novel Method of Radar Modeling for Vehicle Intelligence. SAE Tech. Pap. 2017, 10, 50–57.
- Economic Commission for Europe. Uniform Provisions Concerning the Approval of Vehicles with Regard to Automated Lane Keeping Systems; United Nations: New York, NY, USA; Economic Commission for Europe: Geneva, Switzerland, 2021.
- Economic Commission for Europe. Proposal for the 01 Series of Amendments to UN Regulation No. 157 (Automated Lane Keeping Systeme); United Nations: Geneva, Switzerland; Economic Commission for Europe: Geneva, Switzerland, 2022.
- Ministry of Land and Communications. TRIAS 48-R157-01 Automated Lane Keeping Systems Test (Agreement No.157); Ministry of Land and Communications: Tokyo, Japan, 2020.
- Economic Commission for Europe. New Assessment/ Test Method for Automated Driving (NATMG) uidelines for Validating Automated Driving (ADS) Safety; United Nations: Geneva, Switzerland; Economic Commission for Europe: Geneva, Switzerland, 2022.
- European Commission. Draft Commission Implementing Regulation: Laying Down Rules for the Application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as Regards Uniform Procedures and Technical Specifications for the Type-Approval of Motor Vehicles with Regard to Their Automated Driving System (ADS) (G/TBT/N/EU/884); European Commission: Geneva, Switzerland, 2022.
- ISO 11010-1: 2022. Passenger Cars—Simulation Model Classification—Part 1: Vehicle Dynamics. International Organization for Standardization: Geneva, Switzerland, 2021.
- ISO 22140: 2021. Passenger Cars—Validation of Vehicle Dynamics Simulation—Lateral Transient Response Test Methods. International Organization for Standardization: Geneva, Switzerland, 2021.

