Intelligent connected vehicle formation is mainly for more intelligent snatched vehicles in a complex traffic environment. By adjusting their driving speed and steering, it makes itself and nearby intelligent connected vehicles keep relatively stable geometric posture and the same movement, and meets the task requirements and constraints (such as obstacle avoidance), so as to realize more intelligent connected vehicles between wireless communication collaborative driving behavior. The main technologies involved in the autonomous vehicle formation include: vehicle combination positioning and multi-sensor and multi-source information fusion technology, collaborative formation control technology, and cooperative perception and communication technology.
- intelligent connected vehicle
- cooperative driving system
- V2X
1. Introduction
The direction of automobile development is intelligent and networked. Intelligence includes the perception, decision making, and control of intelligent cars. Car intelligence is usually through the radar system (laser radar, millimeter wave radar, and ultrasonic radar) and visual system (camera) to collect the surrounding environment, and then through the vehicle computer and algorithm for data processing, it makes the optimal decision, the decision signal goes to the vehicle chassis control system, and the intelligent control is realized [3][1]. Networking refers to the function of communication and real-time information between the network environment and real-time information interaction, which can be divided into vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N), and vehicle-to-pedestrian (V2P). An intelligent connected vehicle generally refers to a single vehicle to achieve intelligence through sensor technology. At present, in order to improve the safety and comfort of intelligent vehicles, intelligent connected vehicles, in addition to directly perceiving the environment to make decisions, also need to have the ability to cooperate and act, and reflect the advantages of multi-vehicle intelligence through the cooperation and coordination of vehicle to vehicle [4][2].
In the development and advancement in vehicle-to-everything (V2X) technologies, including vehicle-to-vehicle communication technologies and vehicle and roadside infrastructure communication technologies, collaborative vehicle infrastructure systems (CVIS) and information factors play an increasingly important role in transportation systems [5,6,7][3][4][5]. Intelligent collaborative vehicle control based on vehicle–road cooperation will enable all-round information sensing and compensate for the lack of on-board computing power, which is a future direction in this field. Under the conditions of intelligent networks, vehicles on the road are no longer isolated individuals but multi-vehicle systems formed by wireless communication networks. In the vehicle network environment, intelligent vehicles can obtain information about other vehicles and roads within the communication range based on workshop communication and vehicle–road communication, and they use this information for distributed decision making and control in order to realize the collaborative control of the whole system.
32. Cooperative Control
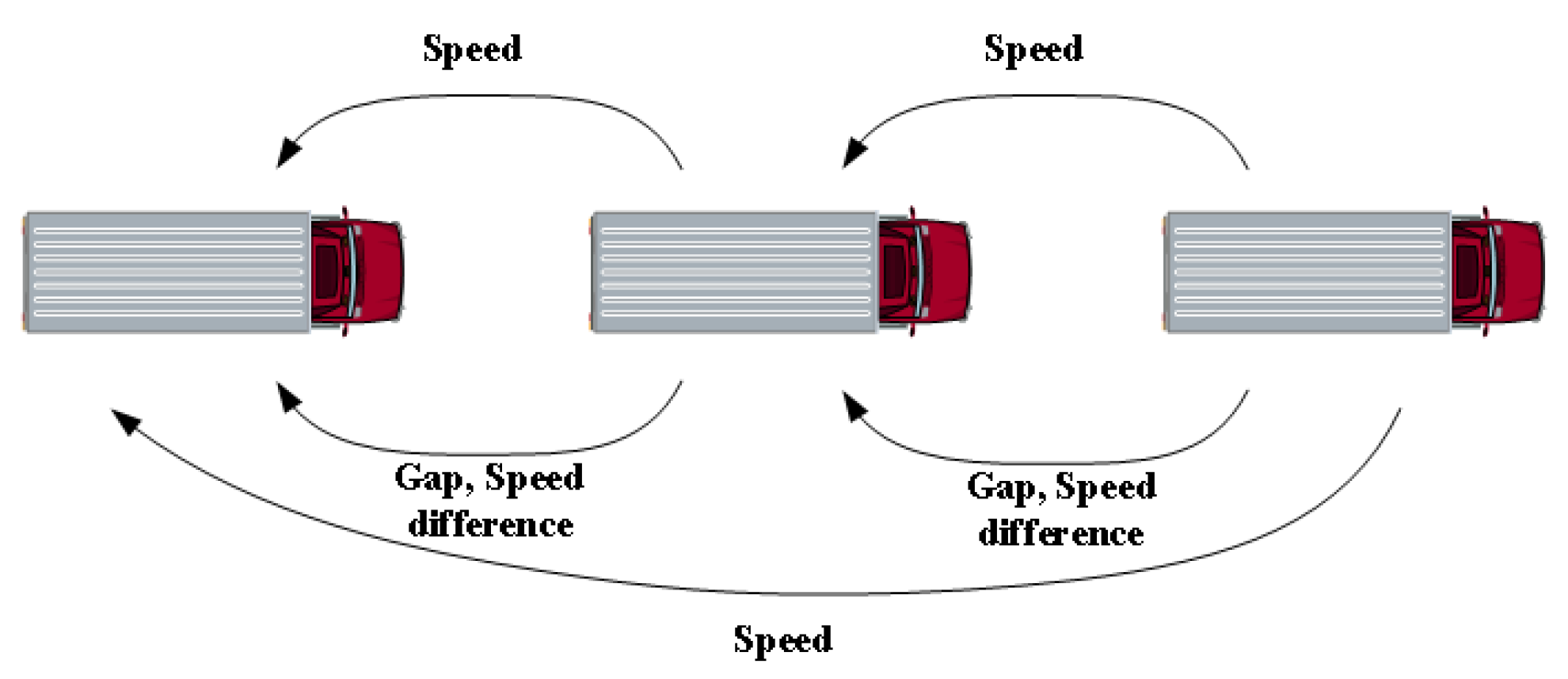
3.1. Vertical Formation
2.1. Vertical Formation
3.2. Vehicle Collaborative Decision-Making and Control Strategy
2.2. Vehicle Collaborative Decision-Making and Control Strategy
3.3. Collaborative Positioning
2.3. Collaborative Positioning
The vehicle–road collaboration technology in the automotive internet integrates modern communication technology and network platforms. Through information sharing among vehicles, roads, and people, it realizes complex environmental sensing, collaborative decision making, and intelligent control functions to build a safe, comfortable, and energy-efficient automotive internet platform. Vehicle GPS technology is usually used to achieve positioning. Due to signal blockage and the multiplex effect, GPS positioning technology often suffers from missing signals or insufficient accuracy to achieve lane-level positioning accuracy and cannot meet the requirements of vehicle–road collaboration applications [74][22]. Cooperative positioning (CP) technology is another method to improve the positioning accuracy of vehicle–road collaboration networks [75][23]. Currently, using various methods to obtain more and more meters or even centimeter-level high precision position information research, based on the global navigation satellite system positioning technology, based on computer vision sensor positioning technology, based on the laser radar sensor positioning technology, and based on super broadband signal positioning technology, the four methods are the mainstream of the high-precision positioning technology route. The global navigation satellite system is the existing and widely used positioning technology in the field of road traffic, and the GPS, Beidou, and other systems are integrated to improve the positioning accuracy and reliability of the positioning system. Zeng Qinghua and others of Nanjing University of Aeronautics and Astronautics proposed that the positioning method of multi-constellation-combined navigation can improve the accuracy of users. [76][24]. Robert Odolinski and others of Otago University also did relevant research in order to reduce the cost of RTK and improve the positioning accuracy, and proposed that [77][25] uses the measurement antenna to improve the positioning accuracy of the receiver. However, the impact on the interference of streamers and tall buildings on satellite signals is [78][26], and satellite signals are vulnerable to road conditions and weather, which will cause signal drift and signal loss, affect normal driving, and even cause safety accidents, which cannot meet the conditions of the high reliability requirements of the positioning system. Computer visual positioning can be divided into: monocular visual positioning navigation, binocular visual positioning navigation, and multiocular visual positioning navigation [79,80,81,82][27][28][29][30]. These positioning and navigation technologies achieved good results in the research of visual positioning. However, bad weather can lead to poor work normally, and existing technology can only well solve the identification of specific targets. The complex scene of the social road cannot well identify any problems, nor can it meet the requirements of real-time and the reliability of the positioning system. Lidar positioning technology uses adjacent point cloud data to derive the rigid body transformation [83][31] between two adjacent frames through feature extraction and a registration algorithm. Compared with other sensors, lidar has incomparable advantages in the unmanned positioning system, and the positioning algorithm, based on lidar sensors, plays an important role in the intelligent driving positioning module of [84,85][32][33]. Ultra wiband technology is a new wireless communication technology. Its positioning technology has low system complexity, low power consumption, good anti-interference ability, high multi-path resolution, and high positioning accuracy [86,87][34][35]. Kegen et al. [88][36] proposed that in order to locate and track the target, we applied the Kalman filtering algorithm in an ultra-wideband positioning system is applied. Car–car and car–road information collaborative interaction drives multiple collaborative positioning applications, for example, car–car collaborative positioning [89][37], based on roadside positioning enhancement [90][38], car–car collaborative integrity monitoring [91][39], and beyond visual distance detection perception [92][40]; at the same time, it also greatly expands the traditional bicycle autonomous positioning weight calculation based on the perceptual range in the weight distribution and actual satellite observation quality level to establish closer correlations. Liu [93][41] et al. established the overall framework of vehicle satellite positioning and collaborative positioning enhancement based on vehicle–road information interaction for the tracking and adaptation of navigation satellite positioning and weight allocation in a complex dynamic operating environment. Based on high-precision mapping and multi-sensor fusion positioning technology, Yao [94][42] and others complement the advantages of various sensing and positioning methods, such as the global navigation satellite system and roadside multi-sensor sensing, and realize the continuous tracking and high-precision positioning of vehicles in urban ground and underground garage scenes. In view of the problem of large positioning errors of unmanned vehicles in unstructured scenarios, combined with on-board lidar and a roadside binocular camera, the dual-layer fusion collaborative positioning algorithm is adopted to achieve high-precision positioning.43. Vehicle Communication
As one of the key technologies in this field, vehicle communication refers to the use of wireless communication, physical terminals, and intelligent sensors to realize V2V, vehicle–road communication (V2I), to enhance traffic efficiency, improve traffic safety and travel experiences, and construct the vehicle network (IOV) or vehicle self-organization network (VANET). The frequency band of on-board communication is mainly divided into low frequency, intermediate frequency, and high frequency. The application representative of low-frequency technology mainly includes automobile anti-theft and keyless systems. The product application of this technology mainly includes vehicle remote control keys; high-frequency communication mainly includes Bluetooth communication, mobile communication, dedicated short-range communication (DSRC), ultra-wideband (UWB) communication, etc.4.1. Communication Security
3.1. Communication Security
With the rapid development of wireless communication technology, intelligent vehicle communication is becoming more vulnerable to potential security attacks [105][43]. Due to the openness of wireless channels, the signal exposed in the open environment is likely to be stolen, interfered with, or even modified by the attacker [106][44]. If the attacker maliciously impersonates the vehicle to release false information and mislead other vehicles to form incorrect judgments, serious consequences may result. At present, the homomorphic aggregation scheme [112][45], elliptic curve encryption algorithm [113][46], and Chinese residual theorem [114][47] are often used to achieve data aggregation. The homomorphic encryption algorithm is the most commonly used technical method of data aggregation [115][48] because it satisfies the cipheric homomorphism operation properties. Homomorphic encryption (HE) refers to the specific calculation of the ciphertext after homomorphic encryption, and the ciphertext calculation results are equivalent to the same calculation [116][49] after the corresponding homomorphic data. Although the scheme in literature [117,118][50][51] can meet the basic privacy protection requirements and efficiency requirements in the internet of vehicles, it still has some deficiencies. The homomorphic encryption algorithm used in the scheme includes the elliptic curve-based encryption algorithm and the Paillier homomorphic encryption algorithm. The scheme based on the Paillier homomorphic encryption algorithm is not based on an elliptical curve. To protect the privacy of the internet of vehicles, there should be the following points: First, ensure that all the vehicles received by the nodes in the vehicle ad hoc network send and receive messages can be verified. The authentication is a method to determine whether the information received is true when the receiving vehicle successfully receives the information sent to it, as well as a method to determine whether the vehicle sending the message is a registered vehicle in the network. Second, ensure the integrity of the messages in the vehicle self-group network. Integrity refers to the message, from sending to receiving, not being tampered with by unauthorized vehicle nodes, add, delete, or packaging. However, a message integrity defect is not necessarily caused by an attacker, but also may be caused by the roadside units, relay vehicle node, routing, and other network line hardware or software equipment failure leading to timeout, packet loss, and other phenomena. Third, ensure that the communication of vehicles in the ad hoc network is confidential. Communication confidentiality means that only the parties sending and receiving the information can correctly interpret the information content, and other vehicle nodes or devices that relay the message cannot obtain the true content of the message. Fourth, ensure the traceability of messages in the vehicle ad hoc network. Traceability means that any message sent, received, relayed, or forwarded by the sender, relay, or receiver of the information will be recorded and retained. The vehicle cannot change or delete the sending, receiving, or relay records, nor can it deny the message sent, received, or relay by itself. Traceability plays an important role in investigating traffic crimes and confirming vehicle tracks. Fifth, it must be ensured that the spatiotemporal correlation of the vehicle’s location is cut off for the attacker in the network. The spatial and temporal correlation of the location is cut off, which means that the attacker cannot know the name, position, and corresponding time of the vehicle at the same time. Once the attacker knows the three points, the location information of the owner or the vehicle can be judged according to the spatial and temporal correlation of the vehicle. There are two kinds of types of privacy protection for in-car ad hoc networks, namely the protection of information privacy and location privacy.4.2. Control Strategy for Communication Delay
3.2. Control Strategy for Communication Delay
At present, the limited computing resources of vehicles are unable to meet the computing resource requirements of many delay-sensitive messages [124][52]. In order to cope with the expanding computing requirements of this vehicle terminal, the existing cloud computing technology can process a large amount of data information, which effectively reduces the local computing burden to a certain extent. However, when the security message is sent to the cloud server for processing through the core network, the processing delay of the message may be greatly affected. At the same time, the transmission of security messages often displays the phenomenon of redundant propagation, which causes a broadcast storm during message transmission and leads to the poor performance of message transmission. Generally, the transmission of emergency messages involves directional propagation, and the emergency messages are broadcast to the farthest receiving vehicles within the communication range [125][53]. The existence of communication delay will affect the following performance of the vehicle, and even threaten the driving safety. Therefore, it is necessary to design [126][54] for CACC control strategy for communication delay. On the one hand, the internal performance of the network can be studied from the perspective of communication, and the communication efficiency and quality can be improved by designing a reasonable network scheduling algorithm and communication protocol, so as to reduce its adverse impact on the control system. On the other hand, the optimization design of the control strategy under limited communication restriction gradually became a research hotspot, and a variety of solutions [127,128,129,130][55][56][57][58] were formed.54. Test Method and Evaluation
5.1. Real Vehicle Road Test Platform
4.1. Real Vehicle Road Test Platform
The real vehicle road test of an intelligent network includes three test scenarios: a closed scene test, a semi-open road test, and an open road test. Firstly, the representative closed test sites in foreign countries include the following: the Asta Zero test site in Sweden, which contains complete experimental facilities and has the capacity to test vehicle dynamics, driver behavior, and V2X technology; the Mria City Circuit test site in the UK, whose main features are simulated signal masking and various V2X communication facilities, with the flexible design of traffic lights and transmitting towers, and is oriented towards the testing of intelligent transportation systems and intelligent networked vehicles [158][59]; the Willow Run test site in Michigan, U.S., which is suitable for the extreme testing of V2X technology and autonomous driving technology, etc. [159][60]. The closed test sites also occupy a large proportion of the domestic real-world test sites. On July 30, 2021, the Ministry of Industry and Information Technology, the Ministry of Public Security, and the Ministry of Communications jointly issued the “Management Specification for Road Testing and Demonstration Application of Intelligent Connected Vehicles (Trial)” [160][61], adding the demonstration application of manned vehicles and special operating vehicles, and opening some expressway tests. At present, there are around 50 test sites in a state of completion or under construction, 30 of which are equipped with testing capability for intelligent networked vehicles. The intelligent driving test base of the Ministry of Transport in Beijing contains traffic scenes of various road shapes and surfaces, such as urban and rural roads, high-speed roads, and their ramps, and is equipped with street lights, traffic lights, weather simulation equipment, and other facilities, which can be used for intelligent driving, intelligent road networks, and other tests. Changsha, Wuhan, and other cities within intelligent network pilot demonstration areas can simulate a variety of road conditions, including wet roads, mountain roads, woodlands, high-speed roads, masonry, bridges, etc.; equipped with intelligent sensors and other monitoring equipment, they can be used for intelligent networked vehicle testing. Secondly, the domestic open test sites mainly include the following: the Shanxi (Yangquan) autonomous driving vehicle–road cooperation demonstration area, where roadside sensing, collection, and transmission systems are being built, and the deployment of the vehicle–road cooperation cloud control platform and autonomous driving vehicle supervision platform based on Baidu’s public cloud was completed, so as to realize object detection technology based on environmental sensing and V2X communication technology to support L4-level autonomous driving vehicle over the horizon, etc. The Yongchuan Baidu Western Autonomous Driving Open Test Base is an open test and demonstration operation base for L4-level autonomous driving. The base deploys 5G communication in the road network environment in all aspects and includes more than 30 typical open road test scenarios in the mountain city, such as interchanges, tunnels, and bridges, with the unique traffic terrain of Chongqing, and it can accommodate 200 intelligent driving vehicles for testing at the same time. The efficient data transmission based on 5G technology and intelligent data processing based on artificial intelligence technology are of great significance for the application of intelligent connected vehicles. The Changsha test demonstration area has a wealth of intelligent connected vehicle test scenarios, and 5G widely covers the intelligent connected vehicle test area. It is the first [161][62] demonstration area to carry out high-speed tests and manned tests in China.5.2. Virtual Test Platform
4.2. Virtual Test Platform
The simulation test experiments of intelligent network connected systems seek to establish a real static scene and carry out dynamic scene modeling according to the actual situation through computer simulation technology, so as to realize the model and algorithm of the network-connected vehicle. The system can carry out a variety of test verification experiments in the simulated traffic scene, reducing the dependence on real vehicle experiments to a certain extent, such as the current mainstream of intelligent driving vehicle sensor physical model simulation authenticity, intelligent transportation system V2X model construction, and the construction of dynamic traffic flow in the simulation scene. At present, a new generation of intelligent driving simulation systems integrating physical characteristic information is being gradually developed, which cannot only verify and iterate intelligent driving algorithms more effectively, but also meet the overall test requirements of intelligent driving simulation platforms for physical information systems more comprehensively. With the rapid development of advanced driver assistance systems (ADAS) and intelligent driving, the development of simulation software underwent the following stages: The early simulation test software mainly used dynamic simulation. The Simulink module of control design simulation software MATLAB was used to build the vehicle dynamics model and carry out real-time simulation, such as Carmaker [162][63], CarSim, Panosim [163][64], and other simulation software. With the further development of the ADAS function, simulation and test software to assist this function began to appear, such as Prescan [164][65]. In recent years, the ability of unreal engines to restore the virtual environment became stronger, and more researchers paid attention to the open-source simulators, such as AirSim [165][66], CARLA [166][67], and Unity. However, due to the diversity and functional complexity of the current mainstream intelligent driving simulation tools, most of them cannot support multi-agent co-simulation or simulation in large-scale scenarios, so the test verification of the off-vehicle networking system in large-scale complex traffic environments is not yet realized. At present, the optimization control of urban traffic in intelligent vehicle network systems is mainly concentrated within single-point traffic control, lacking real-time linkage control. However, the simulation of intelligent driving in large-scale open scenes shifted from macro-centralized control to meso-edge-side coordination control, and then to micro-single-car intelligent control. Therefore, it is necessary to develop simulation tools that can support this hierarchical control model. A microscopic traffic flow simulation model takes vehicles as the description unit, which can describe in detail the car-following and lane-changing behavior between vehicles. At present, the more common ones include SUMO [167][68] and PTV-Vissim [168][69], both of which have corresponding interfaces for secondary development. An intelligent driving simulation simulator based on SUMO and Unity3D [169][70] was proposed through the TraCI protocol. It can be seen that the use of intelligent driving simulation tools to provide single-vehicle intelligent decision making, traffic flow simulation models to provide specific traffic scene modeling and design, and the combination of the two through an interface, can support intelligent networked vehicle collaborative simulation in large-scale open scenes.5.3. Test Method and Evaluation
4.3. Test Method and Evaluation
The test and evaluation of intelligent connected vehicles is an important stage in the development of its vehicle functions. Similar to human drivers, the test method can be divided into three parts: the perception function test, the decision function test based on perception information, and the action function test. Vargas et al. [174][71] proposed a conceptual sensor testing framework for automatic driving vehicles, which is oriented towards different types of sensors and communication mechanisms, and provides a means of performing test scenarios similar to those occurring in the physical world. Wei et al. [175][72] implemented a parallel computing framework and system for intelligent driving tests and verification. It constructs a set of intelligent test models, which enables the system to develop a cognitive mechanism of automatic self-upgrading under the guidance of human experts, and further improves the ability of intelligent driving vehicles to adapt to complex environments. In order to speed up the scene testing, virtual environment simulation can be used. The mainstream virtual environment simulation software includes Prescan, Carmaker, dSpace, etc. At present, most of the tests only cover intelligent driving, and the test methods for intelligent driving vehicles in static, dynamic, and uncertain environments are not perfect. The vehicle decision-making ability test and V2X-based traffic integration test also need to be improved. Domestic and foreign scholars and institutions carried out a lot of basic research work in simulation test methods, test scenarios, simulation modeling, tool chain reliability, and other aspects of [176,177,178,179][73][74][75][76]. For the different stages of the product, different types of simulation and simulation test methods are not only applied to the development process of intelligent and connected vehicles, but also gradually play an important role in the product verification, confirmation, and evaluation. The UN is in the automatic lane keeping system for L3 automated lane keeping systems (ALKS)-type approval regulations for test verification, and put forward the relevant requirements for the simulation tools and models [180,181][77][78]. Japan explicitly introduced the software in the rings in its software-in-the-loop (SIL) and hardware-in-the-loop (HIL) to test the [182][79]. The new test assessment method proposed by the United Nations Informal Working Group on Autonomous Driving Verification Methods requires the use of a proven simulation tool chain to conduct simulation tests to evaluate the safety of autonomous driving systems, and proposes SIL testing for driving safety and critical safety scenario assessment [183][80]. In the draft regulation on the type approval requirements of autonomous driving systems, the EU made it clear that simulation, closed sites, and practical law can be adopted, and roads introduced the United Nations study of [184][81] on the credibility of simulation tests. The vehicle dynamics simulation model and test methods developed by ISO provide the basic [185,186][82][83] for the vehicle dynamics simulation test and verification.References
- Zhao, J.; Song, D.; Zhu, B.; Liu, B.; Chen, Z.; Zhang, P. Intelligent car following control strategy based on the hybrid drive of self-learning and supervised learning. J. Highw. China 2022, 35, 55–65.
- Autonomous Driving Working Committee of China Highway Society. Development Trend and Suggestions of vehicle-road collaborative autonomous driving. Intell. Connect. Car 2019, 4, 50–60.
- Daganzo, C.; Lehe, L. Traffic flow on signalized streets. Transport. Res. B-Meth. 2016, 90, 56–69.
- Evers, R.; Proost, S. Optimizing intersections. Transport. Res. B-Meth. 2015, 71, 100–119.
- Wong, S.; Sze, N.; Li, Y. Contributory factors to traffic crashes at signalized intersections in Hong Kong. Accid. Anal. Prev. 2007, 39, 1107–1113.
- Biswas, S.; Tatchikou, R.; Dion, F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Commun. Mag. 2006, 44, 74–82.
- Rangesh, A.; Trivedl, M. No blind spots: Full-surround multi-object tracking for autonomous vehicles using cameras and lidars. IEEE Trans. Intell. Veh. 2019, 4, 588–599.
- Pan, C.; Huang, A.; Chen, L. A review of the development trend of adaptive cruise control for ecological driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 1931–1948.
- Calvert, S.C.; van Arem, B. Cooperative adaptive cruise control and intelligent traffic signal interaction: A field operational test with platooning on a suburban arterial in real traffic. IET Intell. Transp. Syst. 2020, 14, 1665–1672.
- Isaac, O.; Lagouge, K.; Modestus, O.; Alessandro, S. Comparative Traffic Flow Prediction of a Heuristic ANN Model and a Hybrid ANN-PSO Model in the Traffic Flow Modelling of Vehicles at a Four-Way Signalized Road Intersection. Sustainability 2021, 13, 10704.
- Myungeun, E.; Byung-In, K. The traffic signal control problem for intersections: A review. Eur. Transp. Res. Rev. 2020, 12, 50.
- Dresner, K.; Stone, P. A multiagent approach to autonomous intersection management. J. Artif. Intell. Res. 2018, 31, 591–656.
- Rosolia, U.; Bruyne, D.; Alleyne, A.G. Autonomous vehicle control: A nonconvex approach for obstacle avoidance. IEEE Trans. Control. Syst. Technol. 2016, 25, 469–484.
- Galceran, E.; Cunningham, A.G.; Eustice, R.M.; Olson, E. Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction: Theory and experiment. Auton. Robot. 2017, 41, 1367–1382.
- Chen, L.; Englund, C. Cooperative intersection management: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 17, 570–586.
- Levin, M.W.; Boyles, S.D.; Patel, R. Paradoxes of reservation-based intersection controls in traffic networks. Transp. Res. Part A Policy Pract. 2016, 90, 14–25.
- Jablonský, J. Benchmarks for current linear and mixed integer optimization solvers. Acta Univ. Agric. Silvic. Mendel. Brun. 2015, 63, 1923–1928.
- Zhou, Y.; Ahn, S.; Chitturi, M.; Noyce, D.A. Rolling horizon stochastic optimal control strategy for ACC and CACC under uncertainty. Transp. Res. Part C Emerg. Technol. 2017, 83, 61–76.
- Li, Z.; Pourmehrab, M.; Elefteriadou, L.; Ranka, S. Intersection control optimization for automated vehicles using genetic algorithm. J. Transp. Eng. Part A Syst. 2018, 144, 04018074.
- Wu, J.; Abbas-Turki, A.; Moudni, A.E. Cooperative driving: An ant colony system for autonomous intersection management. Appl. Intell. 2012, 37, 207–222.
- Ying, Z.B.; Ma, M.; Yi, L. Bavpm: Practical autonomous vehicle platoon management supported by blockchain technique. In Proceedings of the 2019 4th International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 5–7 September 2019; pp. 256–260.
- Orujov, F.; Maskeliunas, R.; Damasevicius, R.; Wei, W.; Li, Y. Smartphone based intelligent indoor positioning using fuzzy logic. Future Gener. Comput. Syst. 2018, 89, 335–348.
- Liu, J.; Cai, B.; Wang, J. Cooperative Localization of Connected Vehicles: Integrating GNSS With DSRC Using a Robust Cubature Kalman Filter. IEEE Trans. Intell. Transp. Syst. 2017, 18, 111–2125.
- Zeng, Q.; Liu, J.; Hu, Q.; Yang, D. The Beidou system and GNSS multi-constellation combination navigation performance research. Glob. Position. 2011, 36, 53–57.
- Odolinski, R.; Teunissen, P.J.G. Low-cost, high-precision, single-frequency GPS–BDS RTK positioning. GPS Solut. 2017, 21, 1315–1330.
- Yang, L.; Li, B.; Lou, L. Effect of different tropospheric models on the GPS localization results. Surv. Mapp. Bull. 2009, 4, 9–11.
- Milford, M.J.; Wyeth, G.F. Single camera vision-only SLAM on a suburban road network. In Proceedings of the Robotics and Automation IEEE, Pasadena, CA, USA, 19–23 May 2008; pp. 3684–3689.
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163.
- MPalzkill, T.; Ledermann, A. Verl. Anticipation-Preprocessing for Object Pose Detection. In Proceedings of the ISR 2010 and ROBOTIK 2010, Munich, Germany, 7–9 June 2010; pp. 1–6.
- Brand, C.; Schuster, M.J.; Hirschmüller, H.; Suppa, M. Submap matching for stereo-vision based indoor/outdoor slam. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5670–5677.
- Wang, L.; Zhang, Y.; Wang, J. Map-based localization method for autonomous vehicles using 3D-LIDAR. IFAC-Pap. 2017, 50, 276–281.
- Javanmardi, E.; Gu, Y.; Javanmardi, M.; Kamijo, S. Autonomous vehicle self-localization based on abstract map and multi-channel Li DAR in urban area. IATSS Res. 2019, 43, 1–13.
- Magnusson, M.; Andreasson, H.; Nüchter, A.; Lilienthal, A.J. Automatic appearance-based loop detection from three-dimensional laser data using the normal distributions transform. J. Field Robot. 2009, 26, 892–914.
- Fontana, R.J. Recent system applications of short-pulse ultra-wideband (UWB) technology. IEEE Trans. Microw. Theory Tech. 2004, 52, 2087–2104.
- Parwari, N.; Joshua, N.A.; Kyperountas, S. Locating the Nodes-Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–59.
- Oppermann, I.; Yu, K.; Montillet, J.P.; Rabbachin, A.; Cheong, P. UWB Location and Tracking for Wireless Embedded Networks. Signal Process. 2006, 86, 2153–2171.
- Rohani, M.; Gingras, D.; Vigneron, V.; Gruyer, D. A new decentralized Bayesian approach for cooperative vehicle localization based on fusion of GPS and inter-vehicle distance measurements. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo, Las Vegas, NV, USA, 2–6 December 2013.
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit cooperative positioning in vehicular networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3980.
- Ansari, K.; Feng, Y.; Tang, M. A runtime integrity monitoring framework for real-time relative positioning systems based on GPS and DSRC. IEEE Trans. Intell. Transp. Syst. 2015, 16, 980–992.
- Xiong, J.; Cheong, J.W.; Xiong, Z.; Dempster, A.G.; Tian, S.; Wang, R. Integrity for multi-sensor cooperative positioning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 792–807.
- Liu, J.; Tan, S.; Cai, B.; Wang, J. Based on Vehicle-Road information interaction. Transportation System Engineering and Information. 2022. Available online: https://kns.cnki.net/kcms/detail/11.4520.U.20220811.1444.008.html (accessed on 7 August 2022).
- Yao, H.; Feng, F.; Chen, J. Practical Application of Vehicle⁃Road Cooperation Based on High Precision Map and Multi⁃sensor Fusion Positioning. J. Geomat. 2022, 47, 65–69.
- Wei, W.; Liu, S.; Li, W.; Du, D.Z. Fractal Intelligent Privacy Protection in Online Social Network Using Attribute-Based Encryption Schemes. IEEE Trans. Comput. Soc. Syst. 2018, 6, 189.
- Damaševičius, R.; Woźniak, M.; Alarcon-Aquino, V.; Ganchev, I.; Wei, W. Advances in security and privacy of multimodal interfaces. J. Univers. Comput. Sci. 2018, 24, 338–340.
- Sun, X.; Yu, F.; Zhang, P.; Xie, W.X.; Peng, X. A survey on secure computation based on homomorphic encryption in vehicular Ad Hoc networks. Sensors 2020, 20, 4253.
- Liu, Y.; Lang, X.; Pei, S. Encryption algorithm based on ECC and homomorphic encryption. Comput. Eng. Des. 2020, 41, 1243–1247.
- Wei, X.; Lu, D. Forward secure aggregated signature scheme based on Chinese Remainder Theorem. Comput. Technol. Dev. 2021, 31, 137–141.
- Abbasian Dehkordi, S.; Farajzadeh, K.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K.; Dehkordi, M.A. A survey on data aggregation techniques in IoT sensor networks. Wirel. Netw. 2020, 26, 1243–1263.
- Boudia, O.; Senouci, M. An efficient and secure multidimensional data aggregation for fog computing-based smart grid. IEEE Internet Things J. 2020, 8, 6143–6153.
- Chen, L.; Zhou, J.; Chen, Y.; Cao, Z.F.; Dong, X.; Choo, K.K.R. PADP: Efficient privacypreserving data aggregation and dynamic pricing for vehicle to grid networks. IEEE Internet Things J. 2020, 8, 7863–7873.
- Xie, Y.; Xu, F.; Li, D.; Nie, Y. Efficient message authentication scheme with conditional privacy-preserving and signature aggregation for vehicular cloud network. Wirel. Commun. Mob. Comput. 2018, 2018, 1875489.
- Otomo, M.; Sato, G.; Shibata, Y. In-vehicle Cloudlet Computing System for Disaster Information Based on Delay Tolerant Network Protocol. In Proceedings of the 31st IEEE International Conference on Advanced Information Networking and Applications (IEEE AINA), Taipei, Taiwan, 27–29 March 2017.
- Zhao, H.; Zhu, Y.; Tang, J.; Han, Z.; Aujla, G.S. Message-Sensing Classified Processing and Transmission Scheme Based on Mobile Edge Computing in the Internet of Vehicles. Softw. Pract. Exper. 2020, 51, 2501–2518.
- Zeng, T.; Semiari, O.; Saad, W.; Bennis, M. Joint Communication and Control for Wireless Autonomous Vehicular Platoon Systems. IEEE Trans. Commun. 2019, 67, 7907–7922.
- Bahreini, M.; Zarei, J.; Razavi–Far, R.; Saif, M. Robust Finite-Time Stochastic Stabilization and Fault-Tolerant Control for Uncertain Networked Control Systems Considering Random Delays and Probabilistic Actuator Faults. Trans. Inst. Meas. Control. 2019, 41, 3550–3561.
- Tang, Y.; Peng, C.; Yin, S.; Qiu, J.B.; Gao, H.J.; Kaynak, O. Robust Model Predictive Control Under Saturations and Packet Dropouts With Application to Networked Flotation Processes. IEEE Trans. Autom. Sci. Eng. 2014, 11, 1056–1064.
- Zhang, L.; Xie, W.; Liu, J. Robust Control of Saturating Systems with Markovian Packet Dropouts under Distributed MPC. ISA Trans. 2019, 85, 49–59.
- Li, C.; Jing, H.; Wang, R.; Chen, N. Vehicle Lateral Motion Regulation under Unreliable Communication Links Based on Robust H∞ Output-Feedback Control Schema. Mech. Syst. Signal Process. 2018, 104, 171–187.
- Liu, T.Y.; Yu, Z.P.; Xiong, L.; Zhang, P. Development status and construction suggestions of intelligent Connected Vehicle Test ground. Auto. Technol. 2017, 1, 7–11.
- Zhang, W.; Li, X.H.; Wu, X.Y.; Tang, F.M.; Guo, P.; He, J. Research status of autonomous driving simulation technology. Auto Electric. 2019, 8, 13–15.
- Ministry of Industry and Information Technology; Ministry of Public Security; Ministry of Transport. Notice on the Issuance of the Management Code for Road Testing and Demonstration Application of Intelligent Connected Vehicles (Trial): The Ministry of Industry and Information Technology, No.97,2021. 21 July 2021. Available online: https://baike.baidu.com/item/Managementstandardforroadtestanddemonstrationapplicationofintelligentandconnectedvehicles/55766374?fr=aladdin (accessed on 1 January 2022).
- Changsha Municipal Bureau of Industry and Information Technology. Notice on the issuance of the Implementation Rules of Road Test Management of Intelligent and Connected Vehicle in Changsha City (Trial) V3.0: Changgongxin Digital Issue No. 77,2020. 18 June 2020. Available online: https://baike.baidu.com/item/ImplementationRulesforRoadTestofIntelligentandConnectedVehiclesinChangshaCity(Trial)/23790739?fr=aladdin (accessed on 14 June 2022).
- Varga, B.O.; Burnete, N.; Iclodean, C. Validation Procedure for Worldwide Harmonized Light Vehicles Test Cycle via Hardware in the Loop—Real Time Testing. In Proceedings of the 12th International Congress of Automotive and Transport Engineering (CONAT), Brasov, Romania, 26–29 October 2016.
- Zhang, L.; Du, Z.; Zhao, S.; Zhai, Y.; Shen, Y. Development and Verification of Traffic Confrontation Simulation Test Platform Based on PanoSim. In Proceedings of the 4th IEEE Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Electr, Network, 12–14 June 2020.
- Ortega, J.; Lengyel, H.; Szalay, Z. Overtaking maneuver scenario building for autonomous vehicles with PreScan software. Transport. Engi. 2020, 2, 100029.
- Ates, U. Long-Term Planning with Deep Reinforcement Learning on Autonomous Drones. In Proceedings of the 2020 Innovations in Intelligent Systems and Applications Conference (ASYU), Istanbul, Turkey, 15–17 October 2020.
- Li, G.F.; Yang, Y.F.; Zhang, T.R.; Qu, X.D.; Cao, D.P.; Cheng, B.; Li, K.Q. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios. Transport. Res. C-Emer. 2021, 122, 102820.
- Akhter, S.; Ahsan, N.; Quaderi, S.; Sumit, S.; Rahman, M. A sumo based simulation framework for intelligent traffic management system. Transport. Res. C-Emer. 2020, 8, 1–5.
- Song, Z.; Wang, H.; Sun, J.; Tian, Y. Experimental findings with VISSIM and TransModeler for evaluating environmental and safety impacts using micro-simulations. Transport. Res. Rec. 2020, 2674, 566–580.
- Szalai, M.; Varga, B.; Tettamanti, T.; Tihanyi, V. Mixed reality test environment for autonomous cars using Unity 3D and SUMO. In Proceedings of the 18th IEEE World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 23–25 January 2020.
- Vargas, J.; Alsweiss, S.; Jernigan, M.; Amin, A.; Brinkmann, M.; Santos, J.; Razdan, R. Development of Sensors Testbed for Autonomous Vehicles. In Proceedings of the IEEE SoutheastCon Conference, Huntsville, AL, USA, 11–14 April 2019.
- Wei, B.; Xiao, L.; Wei, W.; Song, Y.; Yan, B.C.; Huo, Z.S. A high-bandwidth and low-cost data processing approach with heterogeneous storage architectures. Pers. Ubiquit. Comput. 2020, 1–18.
- Zhu, B.; Zhang, P.; Zhao, J.; Chen, H.; Xu, Z.; Zhao, X.; Deng, W. Review of Scenario-Based Virtual Validation Methods for Automated Vehicles. China J. Highw. Transp. 2019, 32, 1–19.
- Kirovskii, O. Determination of Validation Testing Scenarios for an ADAS Functionality: Case Study. SAE Tech. Pap. 2019.
- Davision, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067.
- Guo, J.; Deng, W.; Zhang, S.; Qi, S.Q.; Li, X. A Novel Method of Radar Modeling for Vehicle Intelligence. SAE Tech. Pap. 2017, 10, 50–57.
- Economic Commission for Europe. Uniform Provisions Concerning the Approval of Vehicles with Regard to Automated Lane Keeping Systems; United Nations: New York, NY, USA; Economic Commission for Europe: Geneva, Switzerland, 2021.
- Economic Commission for Europe. Proposal for the 01 Series of Amendments to UN Regulation No. 157 (Automated Lane Keeping Systeme); United Nations: Geneva, Switzerland; Economic Commission for Europe: Geneva, Switzerland, 2022.
- Ministry of Land and Communications. TRIAS 48-R157-01 Automated Lane Keeping Systems Test (Agreement No.157); Ministry of Land and Communications: Tokyo, Japan, 2020.
- Economic Commission for Europe. New Assessment/ Test Method for Automated Driving (NATMG) uidelines for Validating Automated Driving (ADS) Safety; United Nations: Geneva, Switzerland; Economic Commission for Europe: Geneva, Switzerland, 2022.
- European Commission. Draft Commission Implementing Regulation: Laying Down Rules for the Application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as Regards Uniform Procedures and Technical Specifications for the Type-Approval of Motor Vehicles with Regard to Their Automated Driving System (ADS) (G/TBT/N/EU/884); European Commission: Geneva, Switzerland, 2022.
- ISO 11010-1: 2022. Passenger Cars—Simulation Model Classification—Part 1: Vehicle Dynamics. International Organization for Standardization: Geneva, Switzerland, 2021.
- ISO 22140: 2021. Passenger Cars—Validation of Vehicle Dynamics Simulation—Lateral Transient Response Test Methods. International Organization for Standardization: Geneva, Switzerland, 2021.