Intelligent connected vehicle formation is mainly for more intelligent snatched vehicles in a complex traffic environment. By adjusting their driving speed and steering, it makes itself and nearby intelligent connected vehicles keep relatively stable geometric posture and the same movement, and meets the task requirements and constraints (such as obstacle avoidance), so as to realize more intelligent connected vehicles between wireless communication collaborative driving behavior. The main technologies involved in the autonomous vehicle formation include: vehicle combination positioning and multi-sensor and multi-source information fusion technology, collaborative formation control technology, and cooperative perception and communication technology.
- intelligent connected vehicle
- cooperative driving system
- V2X
1. Introduction
The direction of automobile development is intelligent and networked. Intelligence includes the perception, decision making, and control of intelligent cars. Car intelligence is usually through the radar system (laser radar, millimeter wave radar, and ultrasonic radar) and visual system (camera) to collect the surrounding environment, and then through the vehicle computer and algorithm for data processing, it makes the optimal decision, the decision signal goes to the vehicle chassis control system, and the intelligent control is realized [1][3]. Networking refers to the function of communication and real-time information between the network environment and real-time information interaction, which can be divided into vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N), and vehicle-to-pedestrian (V2P). An intelligent connected vehicle generally refers to a single vehicle to achieve intelligence through sensor technology. At present, in order to improve the safety and comfort of intelligent vehicles, intelligent connected vehicles, in addition to directly perceiving the environment to make decisions, also need to have the ability to cooperate and act, and reflect the advantages of multi-vehicle intelligence through the cooperation and coordination of vehicle to vehicle [2][4].
In the development and advancement in vehicle-to-everything (V2X) technologies, including vehicle-to-vehicle communication technologies and vehicle and roadside infrastructure communication technologies, collaborative vehicle infrastructure systems (CVIS) and information factors play an increasingly important role in transportation systems [3][4][5][5,6,7]. Intelligent collaborative vehicle control based on vehicle–road cooperation will enable all-round information sensing and compensate for the lack of on-board computing power, which is a future direction in this field. Under the conditions of intelligent networks, vehicles on the road are no longer isolated individuals but multi-vehicle systems formed by wireless communication networks. In the vehicle network environment, intelligent vehicles can obtain information about other vehicles and roads within the communication range based on workshop communication and vehicle–road communication, and they use this information for distributed decision making and control in order to realize the collaborative control of the whole system.
23. Cooperative Control
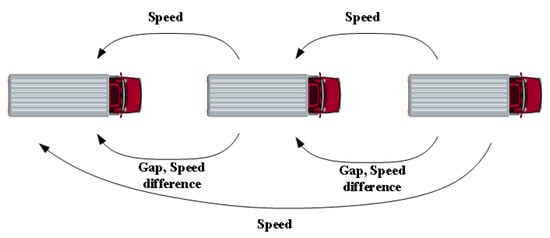
2.1. Vertical Formation
3.1. Vertical Formation