Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Wei Xiao | -- | 1834 | 2022-09-26 13:31:40 | | | |
| 2 | Camila Xu | -1 word(s) | 1833 | 2022-09-27 02:42:57 | | | | |
| 3 | Mingxia Liu | + 6 word(s) | 1839 | 2022-09-27 14:46:30 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Xiao, W.; Liu, M.; Chen, X. Development and Application of Underground Intelligent Load-Haul-Dump Vehicle. Encyclopedia. Available online: https://encyclopedia.pub/entry/27594 (accessed on 26 July 2026).
Xiao W, Liu M, Chen X. Development and Application of Underground Intelligent Load-Haul-Dump Vehicle. Encyclopedia. Available at: https://encyclopedia.pub/entry/27594. Accessed July 26, 2026.
Xiao, Wei, Mingxia Liu, Xubing Chen. "Development and Application of Underground Intelligent Load-Haul-Dump Vehicle" Encyclopedia, https://encyclopedia.pub/entry/27594 (accessed July 26, 2026).
Xiao, W., Liu, M., & Chen, X. (2022, September 26). Development and Application of Underground Intelligent Load-Haul-Dump Vehicle. In Encyclopedia. https://encyclopedia.pub/entry/27594
Xiao, Wei, et al. "Development and Application of Underground Intelligent Load-Haul-Dump Vehicle." Encyclopedia. Web. 26 September, 2022.
Copy Citation
Load-haul-dump vehicle (LHD) is an important and necessary piece of mining equipment, which plays a key role in the transportation of underground ores. Traditional LHD vehicles usually complete ore shoveling, transporting and unloading through manual operation.
underground intelligent LHD
CiteSpace
heap perception
trajectory planning
Autonomous navigation
Real-time monitoring
Fault diagnosis
1. Introduction
Mining is a very important global industry, which is the foundation for industrial development. With the increasing demand of ore raw materials from all over the world and the depletion of shallow mineral resources, following thereupon, the mining scale of underground ore increases greatly [1].
Load-haul-dump vehicle (LHD) is an important and necessary piece of mining equipment, which plays a key role in the transportation of underground ores. Traditional LHD vehicles usually complete ore shoveling, transporting and unloading through manual operation [2][3][4]. However, the following problems always exist [5][6][7][8]. First of all, the production environment is quite harsh. Possible accidents by the underground roadway collapse and the hostile interspace with dust, humidity and noise seriously threaten the health and safety of LHD operators. Second, there are high safety risks upon the driver. Due to underground tunnels normally being narrow and with poor illumination, it is easy for the drivers to experience fatigue while driving, causing accidents. Third, high energy is consumed with low operating efficiency. Since the work efficiency of the LHD mainly depends on the proficiency of the driver, the operating stability of the LHD is unable to be guaranteed. Hence, in order to possibly minimize those issues, how to control and automate the LHDs intelligently have become the main developing trends in this field [9]. In recent years, a large amount of effort has been made on intelligent mining equipment for underground mines, by experts from industry to academia, both overseas and domestically in China. Developed countries, such as Canada, Finland and Sweden, deployed research and application about intelligent and unmanned mining early at the beginning of the 21st century [10]. Various autonomous controlling systems of underground LHDs have been developed successfully and tested in large industrial mines with good results. In China, smart mines have also been constructed gradually with strong technical and financial support from national institutions [11].
Intelligent LHD is a machine system upgraded from traditional LHD by artificial intelligence technology [12], robotic technology [13], information-physics-network technology and image processing technology [14]. It is multi-functionally integrated by remote control, intelligent autonomous operation, intelligent perception and diagnosis, etc. The rapid development of intelligent LHD has really benefitted a lot from the improvements in high-precision positioning and navigation technology. Furthermore, the continuous development and maturity of artificial intelligence (AI) technology also makes significant contributions to it. The intelligent LHD can continue learning new skills to optimize its performance and think like human beings with AI technology [15]. Currently, machine learning (ML) technology has gained wide attention as one of the research directions for artificial intelligence [16][17][18], which has been popularly used in image, speech and other patterns for recognition. Through combining AI technology with automatic control technology, a more effective intelligent trajectory control algorithm has been developed. In addition, the accumulated running data from a real LHD is also conducive to fault prediction and diagnosis.
2. Development and Application Status of Intelligent LHD
The first LHD (version ST-5) was traced back to the 1960s, which was developed successfully in the Grandview Mine by the Wagner Company in the United States. Since then, the LHD has been widely used in underground mining around the world due to its high efficiency and flexibility. According to the level of automation control and development history, LHDs can be divided into four generations [19], as shown in Figure 1. At present, the underground LHD belongs to the fourth generation, with functions of intelligent and independent control [9].
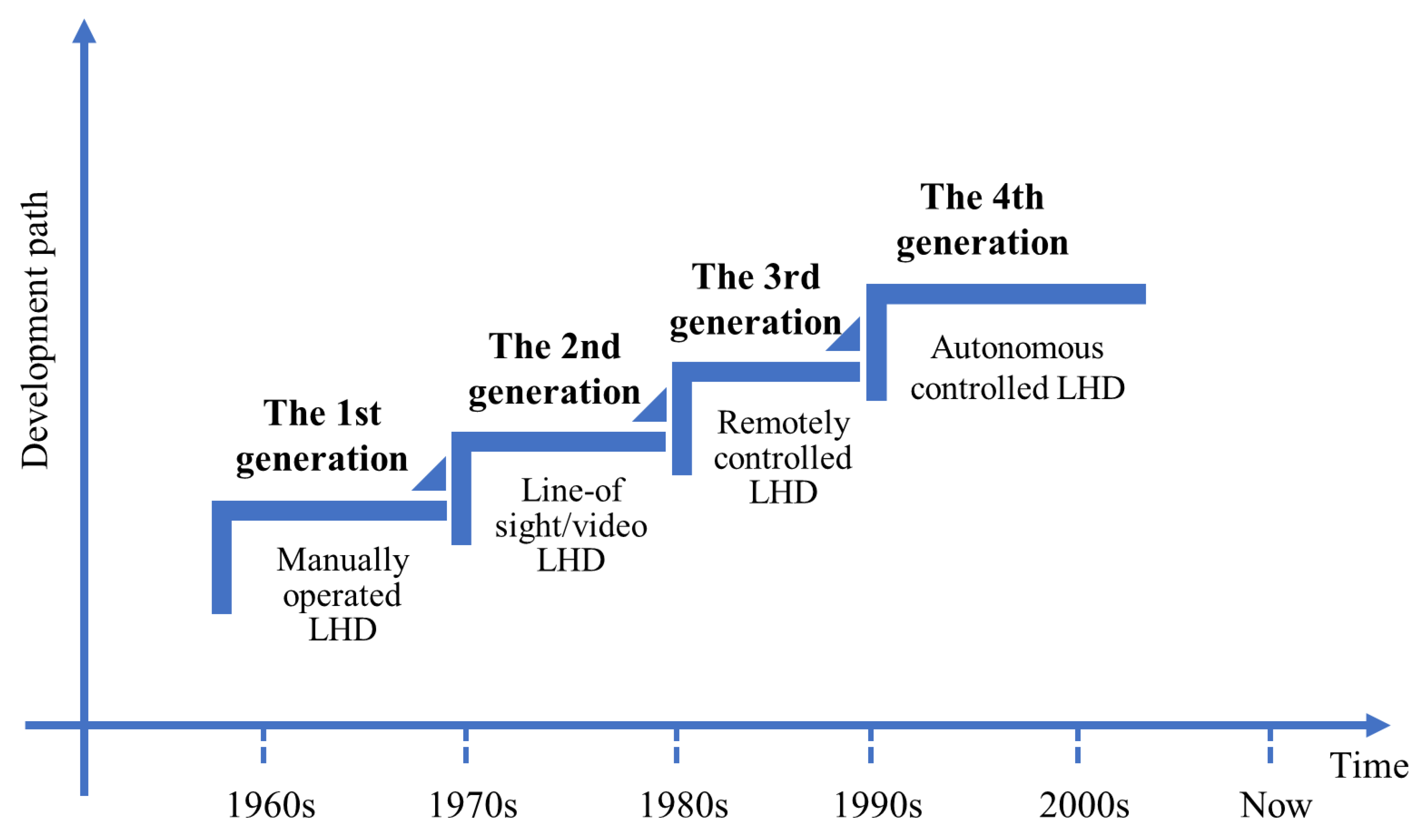
Figure 1. The development history of the LHD.
Foreign research on intelligent LHDs began relatively earlier; hence, many companies invented LHD autonomous driving, uploading controlling systems with their own characteristics after long-term theoretical research and field tests, such as Sandvik in Sweden, Caterpillar in the United States, Atlas Copco in Sweden, etc. [9].
The Tamrock cooperation in Finland (acquired and owned by Sandvik now) was reported to be the first company in the world to exploit automated mining, which developed the AutoMine system with functions of integrated shoveling, transporting, unloading ores and fault diagnosis automatically [20]. The system was helpful for production increases and maintenance and operation cost decreases. The automatic mining yield of each LHD machine (version LH621) in Finland Pyhäsalmi Mine was improved greatly to 300,000 tons per year after being equipped with the AutoMine system. Both the utilization rate of equipment and the output of the entire mine increased significantly [21]. Canada Kidd Creek Mine extended the effective working time of four LH514 LHDs from 12 h to 15 h and increased the production capability by 50% accordingly, after being equipped with four sets of Sandvik company’s single remote-controlling intelligent LHD system [9]. In 2018, Sandvik innovatively invented another new generation of unmanned underground LHDs, which made it possible to shovel, transport and unload ores totally automatically during the whole process. The machine passed through a complicated glass maze successfully with the help of equipped laser scanners, gyroscopes, odometers and angle sensors [22]. However, there has been no industrialization application yet [23]. The MINEGEM system was a new autonomous control system for a new generation of LHDs, jointly developed by Caterpillar and DAS in Australia in around 2004. Remotely controlling the LHDs on the ground to perform operations, such as shovel, transport or unload ore, could be attained with this system, through the cooperation of airborne computers, sensors, wireless networks, etc. This system was adopted by the Malmberget iron mine in Sweden and protected their operators from the dangerous underground environment with a remote ground comfortable operating room. Moreover, the system ran quickly and greatly improved the production efficiency by about 25%; the effective operating time was extended by 4~6 h as well [24][25]. In later years, Caterpillar further developed the ancillary software for this system, named Auto Dig, to automatically control the whole shoveling, transporting and unloading process. Through recoding a large amount of operation data by experienced drivers from a variety of buckets for a variety of given ores during loading cycles, the loading model could be established and optimized by computer and the fully autonomous operation was finally realized.
Atlas copco in Sweden is another famous company for intelligent underground LHD research and development. In 2006, it modified the ST. 1010 underground LHD with a reactive navigation system to an autonomous machine together with researchers from the University of Urebro, which was proved to be practical in the Kvarntorp Mine through automatic tests. At the end of 2007, its LHD automatic control system was applied to the ST-14 underground scraper and the automation experiment was carried out successfully in the Kemi mine in Finland [19]. The machine was equipped with three cameras, two in the front and one at the back. In addition, three additional cameras were reinstalled in the loading and unloading zones on the roadway as a supplement. Through scanning the way in the front roadway in 35 m by the laser mounted on each side of the vehicle, the real-time precise relative position of the ST-14 to the wall could be acquired [23]. After combining the ultra-precision steering algorithm and the speedometer, the operator could determine the precision potion of the machine in the roadway. Recently, Atlas company developed its own Scooptram automation technology, a semi-autonomous control system, with the goal of protecting human safety, improving machine performance and flexibility. The main advantage of the system is that the operation system could be maintained easily in control and integration with other systems without exposing the operator to the unsafe environment. Moreover, no other infrastructure support was needed and it could work even during blasting operation [26].
In addition to the main three companies mentioned above, there were also many other companies or research institutes investing finance and effort on this topic. A German manufacturing company of underground mining equipment called PAUS developed a new version (Tiger 300D) of underground LHD, based on the video remote control technology of the NAUTILUS company. Two cameras were set in front of the loader and another in the back. The cameras acquired and transmitted the image data to the display screen of the remote-control box firstly; the machine was automatically slowed down if someone was found standing on the road, even stopping if necessary. The device not only expanded the driver’s vision, but also could be controlled through wider-range radio and was much safer. Furthermore, it could be either remote controlled automatically or manually controlled [27]. The Commonwealth Scientific and Industrial Research Organization (CSIRO) and the University of Sydney in Australia cooperated in the research on the special sensors for autonomous control of the LHD on the mount ISA. The sensors suitable for the underground environment were picked out through collecting a large amount of data from the sensors installed on the underground LHD [28]. Afterwards, CSIRO further researched the development of autonomous control of underground LHDs, with financial support from AMIRA, mainly focused on the positioning technology based on the dead reckoning method. The autonomous navigation system integrated from the underground electronic map data and the laser scanner sensor and, finally, the autonomous control of the driving process and identification of the signs and blocks on the road could be realized [29]. Vielle Montague in Sweden also developed a remotely operated and navigation-enabled LHD; autonomous controlling tests were carried out in the Zinkgruvan zinc mine. The navigation and autonomous driving could be attained by tracking the white lines coated on the roadway roof with a camera. The maximum running speed was 8 km/h. During the 9-month test period, a total amount of 1200 buckets of ores was transported [30].
China’s research on the autonomous control system of underground LHDs started relatively late and has gone through fges of introducing from abroad, cooperative manufacturing, independently developing, innovatively creating and developing [31]. During the “Eleventh Five-Year” period (2006~2010), Beijing General Research Institute of Mining and Metallurgy conducted a research program on “Accurate Positioning Technology of the Underground Mining Equipment and Modeling Method for the Intelligent Unmanned Underground LHD” under the “863” goal-oriented project, together with the University of Science and Technology Beijing [32].
They constructed an underground electronic map through the vectorization of engineering drawings using GIS software and the position display and alarm of the scraper were basically realized by combined technologies of the laser scanner system [33], track estimation and beacon correction at the same time [34]. As a result, the underground LHD autonomous navigation and control technology were initially developed in China and the model for the unmanned underground LHD was established [35]. Later on from the “Twelfth Five-Year Plan” period, the two institutes cooperated continuously on the program on “Underground Intelligent LHD” under the “863” theme project. The program team explored and researched deeply the autonomous driving and unloading technologies of the LHD [36] and realized the field operation in the line of sight or by remote control in the Zhangzhuang Mine, Fankou Lead-Zinc Mine, Dayingezhuang Gold Mine, etc. [4][8][10].
At present, some underground mines in China are testing and promoting fourth-generation underground fully automatically operated LHDs gradually, in order to realize unmanned mining operations [9].
References
- Wu, A.; Wang, Y.; Zhang, M. New development and prospect of key technology in underground mining of metal mines. Met. Mine 2021, 50, 1.
- Gustafson, A.; Schunnesson, H. The influence of the operating environment on manual and automated load-haul-dump machines: A fault tree analysis. Int. J. Min. Reclam. Environ. 2013, 27, 75–87.
- Gu, Q.; Li, L.; Bai, G. Longitudinal and Lateral Trajectory Planning for the Typical Duty Cycle of Autonomous Load Haul Dump. IEEE Access 2019, 7, 126679–126695.
- Liu, J.; Wang, B.; Sun, Y. Application of intelligent remote control technology for underground mine LHD. Mod. Min. 2020, 36, 134–136,141.
- Jiang, D.; Wang, L. Current situation and development trend of autonomous shovel loading technology for underground LHD. Gold Sci. Technol. 2021, 29, 35–41.
- Gu, D. The development tendency of mining science and technology of underground metal mine. Gold 2004, 25, 18–22.
- Eger, T.; Salmoni, A.; Whissell, R. Factors influencing load-haul-dump operator line of sight in underground mining. Appl. Ergon. 2004, 35, 93–103.
- Lu, Y.; Zhang, J.; Yu, T. Application of unmanned intelligent equipment in Dayingezhuang gold mine. Nonferr. Metall. Equip. 2021, 35, 15–20.
- Liang, X.; Wang, H.; Chen, X. The automatic mining system of the LHD is filling upwards in layers application research of stope. Nonferr. Metall. Equip. 2021, 35, 68–75.
- Li, J.; Zhan, K. Intelligent Mining Technology for an Underground Metal Mine Based on Unmanned Equipment. Engineering 2018, 4, 181–203.
- Tan, Z.; Wu, Q. Analysis on the theory and key technologies of smart mines. China Coal 2019, 45, 30–40.
- Shadrin, S.S.; Varlamov, V.O.; Ivanov, A.M. Experimental Autonomous Road Vehicle with Logical Artificial Intelligence. J. Adv. Transp. 2017, 2017, 2492765.
- Wang, Z.Q.; Hu, X.G.; Li, X.X.; Du, Z.Q. Overview of global path planning algorithms for mobile robots. Comput. Sci. 2021, 48, 19–29.
- Seo, Y.; Shin, K. Hierarchical convolutional neural networks for fashion image classification. Expert Syst. Appl. 2019, 116, 328–339.
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach; Pearson Education Limited: Upper Saddle River, NJ, USA, 2003.
- Dua, M.; Aggarwal, R.K.; Biswas, M. Discriminatively trained continuous Hindi speech recognition system using interpolated recurrent neural network language modeling. Neural Comput. Appl. 2019, 31, 6747–6755.
- Li, B.T.; Pi, D.C. Learning deep neural networks for node classification. Expert Syst. Appl. 2019, 137, 324–334.
- Gomaa, A.; Minematsu, T.; Abdelwahab, M.M. Faster CNN-based vehicle detection and counting strategy for fixed camera scenes. Multimed. Tools Appl. 2022, 81, 25443–25471.
- Gao, M. Talking about the Development of Underground Loader and Underground Vehicle Automation Technology(one). Mod. Min. 2009, 1, 1–6.
- Gao, M. Talking about the Development of Underground Loader and Underground Vehicle Automation Technology(three). Mod. Min. 2010, 2, 5–10.
- Yang, Q.; Zhao, X.; Wu, G.; Cen, Y. Automatic mining technology of LHD and its application prospect. Min. Technol. 2016, 16, 21–25.
- Available online: https://news.d1cm.com/2018092099180.shtml (accessed on 25 July 2022).
- Noakes, F. LHD automation DAS the way to go. Aust. Ming 2003, 8, 38–39.
- Yu, R.; Liu, C.; Zhu, R. Mine Information Model-Development Direction of Mining Informatization. China Mine Eng. 2018, 47, 1–3+13.
- Zhao, X.; Wang, Y.; Guo, R. Application of automatic LHD in mining of gently inclined medium thick orebody. Copp. Eng. 2017, 1, 39–43, +95.
- Scheding, S.; Dissanayake, G.; Nebot, E.; Durrant-Whyte, H. Slip modelling and aided inertial navigation of an LHD. In Proceedings of the IEEE International Conference on Robotics & Automation, Albuquerque, NM, USA, 25 April 1997; Volume 3, pp. 1904–1907.
- Duff, E.S.; Roberts, J.M.; Corke, P.I. Automation of an underground mining vehicle using reactive navigation and opportunistic localization. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; pp. 3775–3780.
- Zhai, X. Research on the Stability of Underground Escort Machine Based on Virtual Prototype Technology; Beijing University of Posts and Telecommunications: Beijing, China, 2015.
- Madhavan, R.; Dissanayake, G.; Durrant-Whyte, H.F. Autonomous underground navigation of an LHD using a combined ICP-EKF approach. In Proceedings of the IEEE International Conference on Robotics & Automation, Leuven, Belgium, 20 May 1998; Volume 4, pp. 3703–3708.
- Paraszczak, J.; Gustafson, A.; Schunnesson, H. Technical and operational aspects of autonomous LHD application in metal mines. Int. J. Min. Reclam. Environ. 2015, 19, 391–403.
- Li, J. Research on Automonous Control of Driving and Dumoing for Underground Load-Haul-Dump. Ph.D. Thesis, University of Science and Technology Beijing, Beijing, China, 2016.
- Guo, X.; Zhan, K.; Gu, H. Research on underground navigation of unmanned scraper. Nonferr. Met. 2009, 61, 143–147.
- Li, J.; Zhan, K.; Zhou, J. Development of laser measurement system based on EPC8900 and its application in underground intelligent scraper. Comput. Technol. Autom. 2012, 31, 83–85.
- Su, W. Research on Precise Positioning Technology of Underground Unmanned Scrapers; University of Science and Technology Beijing: Beijing, China, 2010.
- Yang, C.; Chen, S.; Liu, L. Application of Reactive Navigation in Underground Autonomous Driving Scrapers. Chin. J. Coal 2011, 36, 1943–1948.
- Shi, F.; Gu, H.; Zhan, K. Study on multi-mode autonomous driving control method for underground loader. Min. Metall. 2015, 24, 61–66.
More
Information
Subjects:
Engineering, Mechanical
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.9K
Revisions:
3 times
(View History)
Update Date:
27 Sep 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No