Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Patryk Szwajkowski | -- | 1284 | 2022-09-15 08:26:36 | | | |
| 2 | Patryk Szwajkowski | -2 word(s) | 1282 | 2022-09-19 11:08:44 | | | | |
| 3 | Camila Xu | Meta information modification | 1282 | 2022-09-20 03:18:00 | | | | |
| 4 | Camila Xu | Meta information modification | 1282 | 2022-09-20 08:07:26 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Prochowski, L.; Szwajkowski, P.; Ziubiński, M. Technical Aspects of Autonomous Vehicles Research. Encyclopedia. Available online: https://encyclopedia.pub/entry/27191 (accessed on 24 June 2026).
Prochowski L, Szwajkowski P, Ziubiński M. Technical Aspects of Autonomous Vehicles Research. Encyclopedia. Available at: https://encyclopedia.pub/entry/27191. Accessed June 24, 2026.
Prochowski, Leon, Patryk Szwajkowski, Mateusz Ziubiński. "Technical Aspects of Autonomous Vehicles Research" Encyclopedia, https://encyclopedia.pub/entry/27191 (accessed June 24, 2026).
Prochowski, L., Szwajkowski, P., & Ziubiński, M. (2022, September 15). Technical Aspects of Autonomous Vehicles Research. In Encyclopedia. https://encyclopedia.pub/entry/27191
Prochowski, Leon, et al. "Technical Aspects of Autonomous Vehicles Research." Encyclopedia. Web. 15 September, 2022.
Copy Citation
According to the SAE J3016 standard, autonomous vehicles (AV) are accepted cars classified between levels 3 and 5.
research and test scenarios
specialized test tracks
proving grounds
automated and autonomous vehicles
1. Introduction
Currently, there are a large number of publications on autonomous vehicles. Most of these papers, along with their included research and discussions, deal with technological aspects. The dominant topics are: vehicle control, avoiding road obstacles, and sending information about the current situation of the vehicle and possible threats. This is happening because these vehicles are in a phase of intensive development. A very important stage of development work is model and experimental research.
The test vehicles, often conventionally referred to as autonomous in many publications, perform strictly planned tasks during research. Thus, they operate as automated vehicles (AV).
However, experimental research related to AVs is in an initial state. This is confirmed by a small number of studies of complete control systems for such cars. For example, there are studies that analyze environment perception systems and the vehicle control is investigated separately. Research is still at the stage of gathering knowledge about the performance of different systems under different conditions. Research plans are visible and adapted to the current cognitive needs of the research organizer. This situation is the result of a lack of recommendations and standardized guidelines for the scenarios used in such studies. There is a big problem and binding arrangements (e.g., EU, USA) for the organization of safe AV testing in road traffic is sorely needed [1]. Particularly, the requirements for the scenarios used in such studies have not been specified. Difficulties regarding these scenarios also result from the fact that, in the planned research, local and readily available technical resources and available equipment are first taken into account. In autonomous vehicles, an infinite number of variants related to vehicle behavior arise as a result of autonomous decision-making by the control system. Hence, there may be a very large number of research scenarios. Particular difficulties arise in the organization of research in critical traffic situations [2][3].
2. Technical Aspects of AV Research
The organization of research according to specific scenarios requires meeting the technical requirements contained therein. Technical aspects in the research scenarios include the characteristics of the research environment and the characteristics and parameters of the vehicle. The relevant issues in this area will be presented below.
2.1. Research Vehicles
Research according to the described scenarios is usually carried out with the use of passenger cars [4]. The movement of the vehicle during the research is automated or controlled by the driver. Depending on the subject and scope of the research, the following are also used:
The use of reduced-scale car models allows for significant reductions in research costs, the space required for their realization, as well as the risk of possible damages in case of a defective realization of the scenario. It should be noted, however, that conducting research on physical models may not provide complete information on the dynamics of real car motion, and the problem of scaling vehicles is a complex and problematic issue [11][12][13].
2.2. Places of Research
Many countries still do not allow the testing of autonomous vehicles on public roads. Therefore, in addition to limited road fragments, special places are prepared for the realization of experimental research of autonomous cars, such as:
- −
- −
- −
-
proving grounds containing an oval track (such as KATRI—Korea Apparel Testing and Research Institute) [19];
- −
-
tracks used in car racing (Monza in Italy) [4];
- −
-
fragments of road infrastructure excluded from public traffic which have been specially selected for conducting research according to specific scenarios [20];
- −
The number of public roads where research is allowed is small, but has been increasing recently [23].
2.3. Infrastructure Elements and Other Objects
The realization of experimental research often requires the use of additional objects. Their presence within the range of the car’s perception system is the basis for the operation of the control system. In road traffic, these include other vehicles, pedestrians, cyclists, or fixed obstacles. If the course of the research is not related to the realization of critical maneuvers, the scenarios depend on the state of road traffic. Research results according to such scenarios are available in [6][24][25].
Due to limitations surrounding the possibility of conducting research on public roads, it is necessary to conduct research in a closed area. In such an area, real objects (e.g., other road users) are replaced with various types of dummies, decorations, and physical models. Table 1 summarizes examples of artificial objects used in automated vehicles test scenarios, e.g., in the role of obstacles in their planned path.
Table 1. Examples of artificial objects and their roles in the research scenario.
| Aim of the Research | Artificial Objects | Role in the Research | Publication |
|---|---|---|---|
| Avoiding obstacles, braking in front of obstacles | Cardboard boxes | Marking a road lane | [7] |
| Control of the vehicle braking process | Dummy parts of the rear of a car body (stationary or movable) | Imitation of a car on the road | [26][27][28] |
| 2D and 3D obstacle identification | Road cones | Objects to be identified by the perception system | [6] |
| Critical maneuvers to avoid collisions with suddenly appearing obstacles | Soft wall covered with a metallized mirrored film | Obstacle on the AV’s driving path (stationary, mobile) | [29] |
| Critical maneuvers to avoid front-end collisions with suddenly appearing obstacles | Pedestrian, child, and bicyclist dummies on a moving platform; soft car target | Moving objects on the path intersecting with the AV’s driving path | [30][31] |
| Defensive maneuvers before the collision; the lane change problem | Susceptible obstacle on a moving platform | Moving objects on the path intersecting with the AV’s driving path | [32][33] |
Figure 1 shows the objects used in AV experimental research. In [7] boxes and cardboard boxes were used to mark the road lane, whose arrangement around the vehicle was the basis for controlling AV movement (Figure 1a). Figure 1b shows a soft passenger car target after mounting on a moving platform. The target was used in scenarios of avoiding a suddenly appearing obstacle [32][33]. For example, the car model moving on a collision path with AV, forced a change of AV driving path and trajectory.
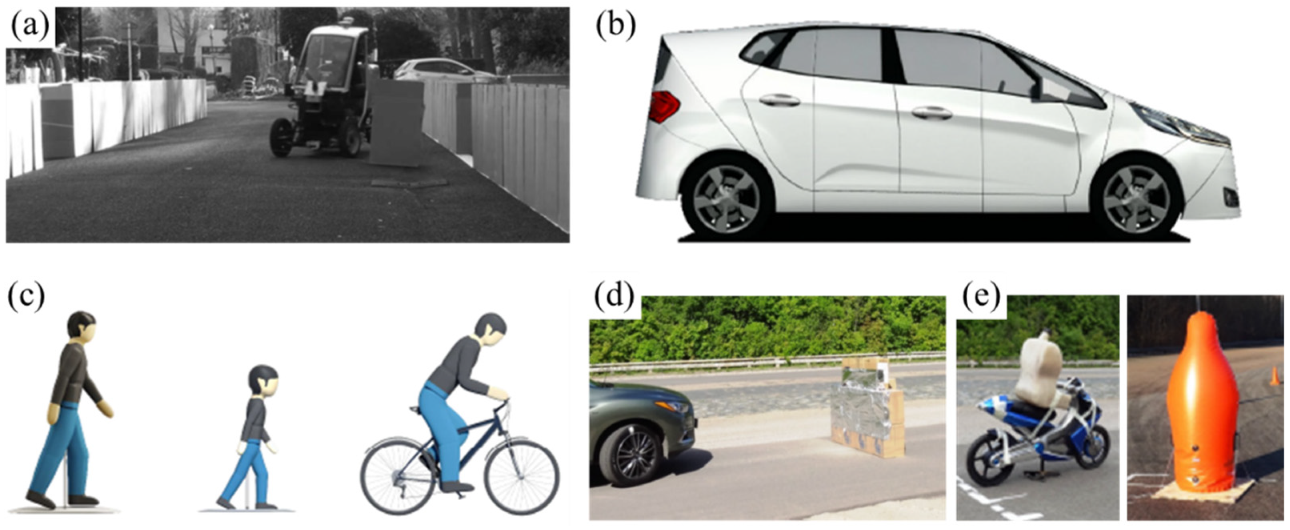
Figure 1. Obstacles examples used in experimental research scenarios: (a) pieces of cardboard to mark the road lane and the obstacle [7]; (b) soft car target on a moving platform [32][33]; (c) pedestrian, child, bicyclist dummy on a moving platform [34]; (d) soft wall covered with a metallized mirrored film [31]; (e) motorcyclist and human figure dummy [31].
Dummies of pedestrians, children and bicyclists are used in a similar role (Figure 1c [34] and Figure 1d [31]). Figure 1d also shows an example of an obstacle in the AV path, built in the form of a soft wall covered with a material with reflective properties to facilitate detection by the vehicle perception system [31].
Conducting experimental AV research requires the provision of appropriate facilities and technical conditions. The AV system is located on the research vehicle, which is usually a passenger car. However, there are test scenarios where other vehicles, go-karts, or reduced-scale vehicles are used. Due to the limited possibility of conducting research in road traffic, most AV research is carried out on test tracks and proving grounds. They are usually equipped with road infrastructure to replicate actual road conditions. It is necessary to use dummies, models, and mannequins of other road users, including pedestrians, children, bicyclists, or other vehicles. Their role in research varies, but usually their presence in the environment is the basis for AV control.
References
- Guerra, E. Planning for Cars That Drive Themselves: Metropolitan Planning Organizations, Regional Transportation Plans, and Autonomous Vehicles. J. Plan. Educ. Res. 2016, 36, 210–224.
- Prochowski, L.; Ziubiński, M.; Szwajkowski, P.; Gidlewski, M.; Pusty, T.; Stańczyk, T.L. Impact of Control System Model Parameters on the Obstacle Avoidance by an Autonomous Car-Trailer Unit: Research Results. Energies 2021, 14, 2958.
- Prochowski, L.; Ziubiński, M.; Szwajkowski, P.; Pusty, T.; Gidlewski, M. Experimental and Simulation Examination of the Impact of the Control Model on the Motion of a Motorcar with a Trailer in a Critical Situation. In Proceedings of the 15th International Conference Dynamical Systems-Theory and Applications DSTA, Łódź, Poland, 4 December 2019.
- Cudrano, P.; Mentasti, S.; Matteucci, M.; Bersani, M.; Arrigoni, S.; Cheli, F. Advances in Centerline Estimation for Autonomous Lateral Control. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 9 October–13 November 2020.
- Shilo, A. Detection and Tracking of Unknown Objects on the Road Based on Sparse LiDAR Data for Heavy Duty Vehicles. Master’s Thesis, KTH School of Electrical Engineering and Computer Science (EECS), Stockholm, Sweden, 2018. Available online: http://www.diva-portal.org/smash/get/diva2:1256042/FULLTEXT01.pdf (accessed on 2 August 2022).
- Bruno, D.; Peres Nunes Matias, L.; Amaro, J.; Osório, F.S.; Wolf, D. Computer Vision System with 2D and 3D Data Fusion for Detection of Possible Auxiliaries Routes in Stretches of Interdicted Roads. In Proceedings of the 52nd Hawaii International Conference on System Sciences HICSS, Grand Wailea, Maui, HI, USA, 8–11 January 2019; ISBN 978-0-9981331-2-6.
- Hayashi, R.; Isogai, J.; Raksincharoensak, P.; Nagai, M. Autonomous Collision Avoidance System by Combined Control of Steering and Braking Using Geometrically Optimised Vehicular Trajectory. Veh. Syst. Dyn. 2012, 50, 151–168.
- Törő, O.; Bécsi, T.; Aradi, S. Design of Lane Keeping Algorithm of Autonomous Vehicle. Period. Polytech. Transp. Eng. 2016, 44, 60–68.
- Vincke, B.; Rodriguez Florez, S.; Aubert, P. An Open-Source Scale Model Platform for Teaching Autonomous Vehicle Technologies. Sensors 2021, 21, 3850.
- Scheffe, P.; Maczijewski, J.; Kloock, M.; Kampmann, A.; Derks, A.; Kowalewski, S.; Alrifaee, B. Networked and Autonomous Model-Scale Vehicles for Experiments in Research and Education. This Research Is Supported by the Deutsche Forschungsgemein-Schaft (German Research Foundation) within the Priority Program SPP 1835 “Cooperative Interacting Automobiles” (Grant Number: KO 1430/17-1) and the Post Graduate Program GRK 1856 “Integrated Energy Supply Modules for Roadbound E-Mobility”. IFAC-PapersOnLine 2020, 53, 17332–17337.
- Lapapong, S.; Gupta, V.; Callejas, E.; Brennan, S. Fidelity of Using Scaled Vehicles for Chassis Dynamic Studies. Veh. Syst. Dyn. 2009, 47, 1401–1437.
- Liburdi, A. Development of a Scale Vehicle Dynamics Test Bed. Master’s Thesis, University of Windsor, Windsor, ON, Canada, 2010. Available online: https://scholar.uwindsor.ca/etd/195/ (accessed on 2 August 2022).
- Park, Y.; Kim, B.; Ahn, C. Scaled Experiment with Dimensional Analysis for Vehicle Lateral Dynamics Maneuver. In Proceedings of the Advances in Dynamics of Vehicles on Roads and Tracks; Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 1288–1294.
- Szalay, Z.; Tettamanti, T.; Esztergár-Kiss, D.; Varga, I.; Bartolini, C. Development of a Test Track for Driverless Cars: Vehicle Design, Track Configuration, and Liability Considerations. Period. Polytech. Transp. Eng. 2018, 46, 29–35.
- Katzorke, N. Proving Ground Requirements for Automated Vehicle Testing. In Proceedings of the ADAS & Autonomous Vehicle Technology Conference, San Jose, CA, USA, 7–8 September 2022.
- Huang, W.; Wang, K.; Lv, Y.; Zhu, F. Autonomous Vehicles Testing Methods Review. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 163–168.
- Chen, R.; Arief, M.; Zhang, W.; Zhao, D. How to Evaluate Proving Grounds for Self-Driving? A Quantitative Approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5737–5748.
- Chen, R.; Arief, M.; Zhao, D. An “Xcity” Optimization Approach to Designing Proving Grounds for Connected and Autonomous Vehicles. arXiv 2018, arXiv:1808.03089.
- Kang, C.M.; Lee, J.; Yi, S.G.; Jeon, S.J.; Son, Y.S.; Kim, W.; Lee, S.-H.; Chung, C.C. Lateral Control for Autonomous Lane Keeping System on Highways. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 1728–1733.
- Fremont, D.J.; Kim, E.; Pant, Y.V.; Seshia, S.A.; Acharya, A.; Bruso, X.; Wells, P.; Lemke, S.; Lu, Q.; Mehta, S. Formal Scenario-Based Testing of Autonomous Vehicles: From Simulation to the Real World. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8.
- Xiong, L.; Fu, Z.; Zeng, D.; Leng, B. An Optimized Trajectory Planner and Motion Controller Framework for Autonomous Driving in Unstructured Environments. Sensors 2021, 21, 4409.
- Yang, S.M.; Lin, Y.A. Development of an Improved Rapidly Exploring Random Trees Algorithm for Static Obstacle Avoidance in Autonomous Vehicles. Sensors 2021, 21, 2244.
- Szalay, Z. Structure and Architecture Problems of Autonomous Road Vehicle Testing and Validation. In Proceedings of the 15th Mini Conference on Vehicle System Dynamics, Identification and Anomalies-VSDIA, Budapest, Hungary, 7–9 November 2016; Volume 24, pp. 229–236, ISBN 978-963-313-266-1.
- Meyer, G.P.; Charland, J.; Hegde, D.; Laddha, A.; Vallespi-Gonzalez, C. Sensor Fusion for Joint 3D Object Detection and Semantic Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019.
- Wu, B.F.; Lin, C.-T.; Chen, C.-J. Real-Time Lane and Vehicle Detection Based on A Single Camera Model. Int. J. Comput. Appl. 2010, 32, 149–159.
- Jansson, J. Collision Avoidance Theory: With Application to Automotive Collision Mitigation. Ph.D. Thesis, Linköping studies in science and technology Dissertations. Linköping University Electronic Press, Sweden, Switzerland, 2005.
- Aparicio, A.; Boltshauser, S.; Lesemann, M.; Jacobson, J.; Eriksson, H.; Herard, J. Status of Test Methods for Active Safety Systems; SAE International: Warrendale, PA, USA, 2012.
- Aparicio, A.; Lesemann, M.; Eriksson, H. Status of Test Methods for Autonomous Emergency Braking Systems—Results from the Active Test Project. In Proceedings of the SAE 2013 World Congress and Exhibition, Detroit, MI, USA, 16–18 April 2013.
- Ivanov, A.M.; Shadrin, S.S.; Kristalniy, S.R.; Popov, N.V. Possible Scenarios of Autonomous Vehicles’ Testing in Russia. IOP Conf. Ser. Mater. Sci. Eng. 2019, 534, 012001.
- Böhm, K.; Paula, D.; Geidl, B.; Graßl, L.; Kubjatko, T.; Schweiger, H.-G. Reliability and Performance of the AEB System of a Tesla Model X under Different Conditions. In Proceedings of the 29th Annual Congress of the European Association for Accident Research, Haifa, Israel, 6–7 October 2021.
- Ivanov, A.M.; Kristalniy, S.R.; Popov, N.V.; Toporkov, M.A.; Isakova, M.I. New Testing Methods of Automatic Emergency Braking Systems and the Experience of Their Application. IOP Conf. Ser. Mater. Sci. Eng. 2018, 386, 012019.
- Euro-Ncap-Aeb-C2c-Test-Protocol-V303.Pdf. Available online: https://cdn.euroncap.com/media/62794/euro-ncap-aeb-c2c-test-protocol-v303.pdf (accessed on 2 August 2022).
- Euro-Ncap-Lss-Test-Protocol-V302.Pdf. Available online: https://cdn.euroncap.com/media/64973/euro-ncap-lss-test-protocol-v302.pdf (accessed on 2 August 2022).
- Euro-Ncap-Aeb-Vru-Test-Protocol-V304.Pdf. Available online: https://cdn.euroncap.com/media/62795/euro-ncap-aeb-vru-test-protocol-v304.pdf (accessed on 2 August 2022).
More
Information
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
962
Revisions:
4 times
(View History)
Update Date:
20 Sep 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No