Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
According to the SAE J3016 standard [1,2], autonomous vehicles (AV) are accepted cars classified between levels 3 and 5.
- research and test scenarios
- specialized test tracks
- proving grounds
- automated and autonomous vehicles
1. Introduction
Currently, there are a large number of publications on autonomous vehicles. Most of these papers, along with their included research and discussions, deal with technological aspects. The dominant topics are: vehicle control, avoiding road obstacles, and sending information about the current situation of the vehicle and possible threats. This is happening because these vehicles are in a phase of intensive development. A very important stage of development work is model and experimental research.
The test vehicles, often conventionally referred to as autonomous in many publications, perform strictly planned tasks during research. Thus, they operate as automated vehicles (AV).
However, experimental research related to AVs is in an initial state. This is confirmed by a small number of studies of complete control systems for such cars. For example, there are studies that analyze environment perception systems and the vehicle control is investigated separately. Research is still at the stage of gathering knowledge about the performance of different systems under different conditions. Research plans are visible and adapted to the current cognitive needs of the research organizer. This situation is the result of a lack of recommendations and standardized guidelines for the scenarios used in such studies. There is a big problem and binding arrangements (e.g., EU, USA) for the organization of safe AV testing in road traffic is sorely needed [3]. Particularly, the requirements for the scenarios used in such studies have not been specified. Difficulties regarding these scenarios also result from the fact that, in the planned research, local and readily available technical resources and available equipment are first taken into account. In autonomous vehicles, an infinite number of variants related to vehicle behavior arise as a result of autonomous decision-making by the control system. Hence, there may be a very large number of research scenarios. Particular difficulties arise in the organization of research in critical traffic situations [4,5].
2. Technical Aspects of AV Research
The organization of research according to specific scenarios requires meeting the technical requirements contained therein. Technical aspects in the research scenarios include the characteristics of the research environment and the characteristics and parameters of the vehicle. The relevant issues in this area will be presented below.
2.1. Research Vehicles
Research according to the described scenarios is usually carried out with the use of passenger cars [31]. The movement of the vehicle during the research is automated or controlled by the driver. Depending on the subject and scope of the research, the following are also used:
The use of reduced-scale car models allows for significant reductions in research costs, the space required for their realization, as well as the risk of possible damages in case of a defective realization of the scenario. It should be noted, however, that conducting research on physical models may not provide complete information on the dynamics of real car motion, and the problem of scaling vehicles is a complex and problematic issue [82,83,84].
2.2. Places of research
Many countries still do not allow the testing of autonomous vehicles on public roads. Therefore, in addition to limited road fragments, special places are prepared for the realization of experimental research of autonomous cars, such as:
- −
- −
- −
-
proving grounds containing an oval track (such as KATRI—Korea Apparel Testing and Research Institute) [30];
- −
-
tracks used in car racing (Monza in Italy) [31];
- −
-
fragments of road infrastructure excluded from public traffic which have been specially selected for conducting research according to specific scenarios [89];
- −
The number of public roads where research is allowed is small, but has been increasing recently [92].
2.3. Infrastructure Elements and Other Objects
The realization of experimental research often requires the use of additional objects. Their presence within the range of the car’s perception system is the basis for the operation of the control system. In road traffic, these include other vehicles, pedestrians, cyclists, or fixed obstacles. If the course of the research is not related to the realization of critical maneuvers, the scenarios depend on the state of road traffic. Research results according to such scenarios are available in [25,67,70].
Due to limitations surrounding the possibility of conducting research on public roads, it is necessary to conduct research in a closed area. In such an area, real objects (e.g., other road users) are replaced with various types of dummies, decorations, and physical models. Table 5 summarizes examples of artificial objects used in automated vehicles test scenarios, e.g., in the role of obstacles in their planned path.
Table 5. Examples of artificial objects and their roles in the research scenario.
| Aim of the Research | Artificial Objects | Role in the Research | Publication |
|---|---|---|---|
| Avoiding obstacles, braking in front of obstacles | Cardboard boxes | Marking a road lane | [34] |
| Control of the vehicle braking process | Dummy parts of the rear of a car body (stationary or movable) | Imitation of a car on the road | [72,93,94] |
| 2D and 3D obstacle identification | Road cones | Objects to be identified by the perception system | [67] |
| Critical maneuvers to avoid collisions with suddenly appearing obstacles | Soft wall covered with a metallized mirrored film | Obstacle on the AV’s driving path (stationary, mobile) | [55] |
| Critical maneuvers to avoid front-end collisions with suddenly appearing obstacles | Pedestrian, child, and bicyclist dummies on a moving platform; soft car target | Moving objects on the path intersecting with the AV’s driving path | [51,56] |
| Defensive maneuvers before the collision; the lane change problem | Susceptible obstacle on a moving platform | Moving objects on the path intersecting with the AV’s driving path | [17,28] |
Figure 6 shows the objects used in AV experimental research. In [34] boxes and cardboard boxes were used to mark the road lane, whose arrangement around the vehicle was the basis for controlling AV movement (Figure 6a). Figure 6b shows a soft passenger car target after mounting on a moving platform. The target was used in scenarios of avoiding a suddenly appearing obstacle [17,28]. For example, the car model moving on a collision path with AV, forced a change of AV driving path and trajectory.
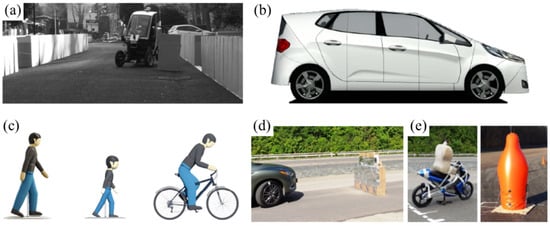
Figure 6. Obstacles examples used in experimental research scenarios: (a) pieces of cardboard to mark the road lane and the obstacle [34]; (b) soft car target on a moving platform [17,28]; (c) pedestrian, child, bicyclist dummy on a moving platform [43]; (d) soft wall covered with a metallized mirrored film [56]; (e) motorcyclist and human figure dummy [56].
Dummies of pedestrians, children and bicyclists are used in a similar role (Figure 6c [43] and Figure 6d [56]). Figure 6d also shows an example of an obstacle in the AV path, built in the form of a soft wall covered with a material with reflective properties to facilitate detection by the vehicle perception system [56].
Conducting experimental AV research requires the provision of appropriate facilities and technical conditions. The AV system is located on the research vehicle, which is usually a passenger car. However, there are test scenarios where other vehicles, go-karts, or reduced-scale vehicles are used. Due to the limited possibility of conducting research in road traffic, most AV research is carried out on test tracks and proving grounds. They are usually equipped with road infrastructure to replicate actual road conditions. It is necessary to use dummies, models, and mannequins of other road users, including pedestrians, children, bicyclists, or other vehicles. Their role in research varies, but usually their presence in the environment is the basis for AV control.
This entry is adapted from the peer-reviewed paper 10.3390/s22176586
This entry is offline, you can click here to edit this entry!