Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Luca Bruzzone | -- | 2768 | 2022-08-24 02:35:13 | | | |
| 2 | Amina Yu | + 1 word(s) | 2769 | 2022-08-24 04:06:28 | | | | |
| 3 | Amina Yu | -1 word(s) | 2768 | 2022-08-26 08:31:23 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Bruzzone, L.; Nodehi, S.E.; Fanghella, P. Tracked Locomotion Systems for Ground Mobile Robots. Encyclopedia. Available online: https://encyclopedia.pub/entry/26413 (accessed on 27 July 2026).
Bruzzone L, Nodehi SE, Fanghella P. Tracked Locomotion Systems for Ground Mobile Robots. Encyclopedia. Available at: https://encyclopedia.pub/entry/26413. Accessed July 27, 2026.
Bruzzone, Luca, Shahab Edin Nodehi, Pietro Fanghella. "Tracked Locomotion Systems for Ground Mobile Robots" Encyclopedia, https://encyclopedia.pub/entry/26413 (accessed July 27, 2026).
Bruzzone, L., Nodehi, S.E., & Fanghella, P. (2022, August 24). Tracked Locomotion Systems for Ground Mobile Robots. In Encyclopedia. https://encyclopedia.pub/entry/26413
Bruzzone, Luca, et al. "Tracked Locomotion Systems for Ground Mobile Robots." Encyclopedia. Web. 24 August, 2022.
Copy Citation
Service robotics is presently one of the fastest-growing technological fields. Nevertheless, while Automated Guided Vehicles (AGV) moving on flat and compact grounds are already commercially available and widely used to move components and products inside industrial buildings, the extensive application of ground mobile robots in environments that are unstructured or structured for humans is a promising challenge for the next years. The important application fields are agriculture, planetary exploration, reconnaissance in dangerous situations, such as radioactive or chemical contamination, homeland security and military operations, demining, intervention in case of terrorist attacks, and surveillance.
mobile robot
tracked locomotion
tracks
crawlers
classification
1. Classifications of Tracked Locomotion Systems
Tracked locomotion systems can be classified in many different ways. Considering the functional features, the most evident classifications can be based on:
-
Body architecture: non-articulated/articulated, type of articulation;
-
Track profile: constant profile, passively or actively deformable profile;
-
Track type: continuous, mechanical, and omni-tracks.
2. Classification of Body Architectures of Tracked Robots
2.1. Body of a Tracked Robot: Definition and Classes
In the following, the body of a tracked ground mobile robot (TGMR) will be considered as the set of all its mechanical parts, excluding the tracks, the rotating members which support the tracks (sprockets, idler sprockets, and carriers), the wheels, if present, and other internal mechanisms hosted in the robot’s main body, such as the rotating members of actuators, gearboxes, and translating devices which shift the position of some components. TGMRs can have a non-articulated body (TGMRs-NA) or an articulated body (TGMRs-A) (Figure 1).
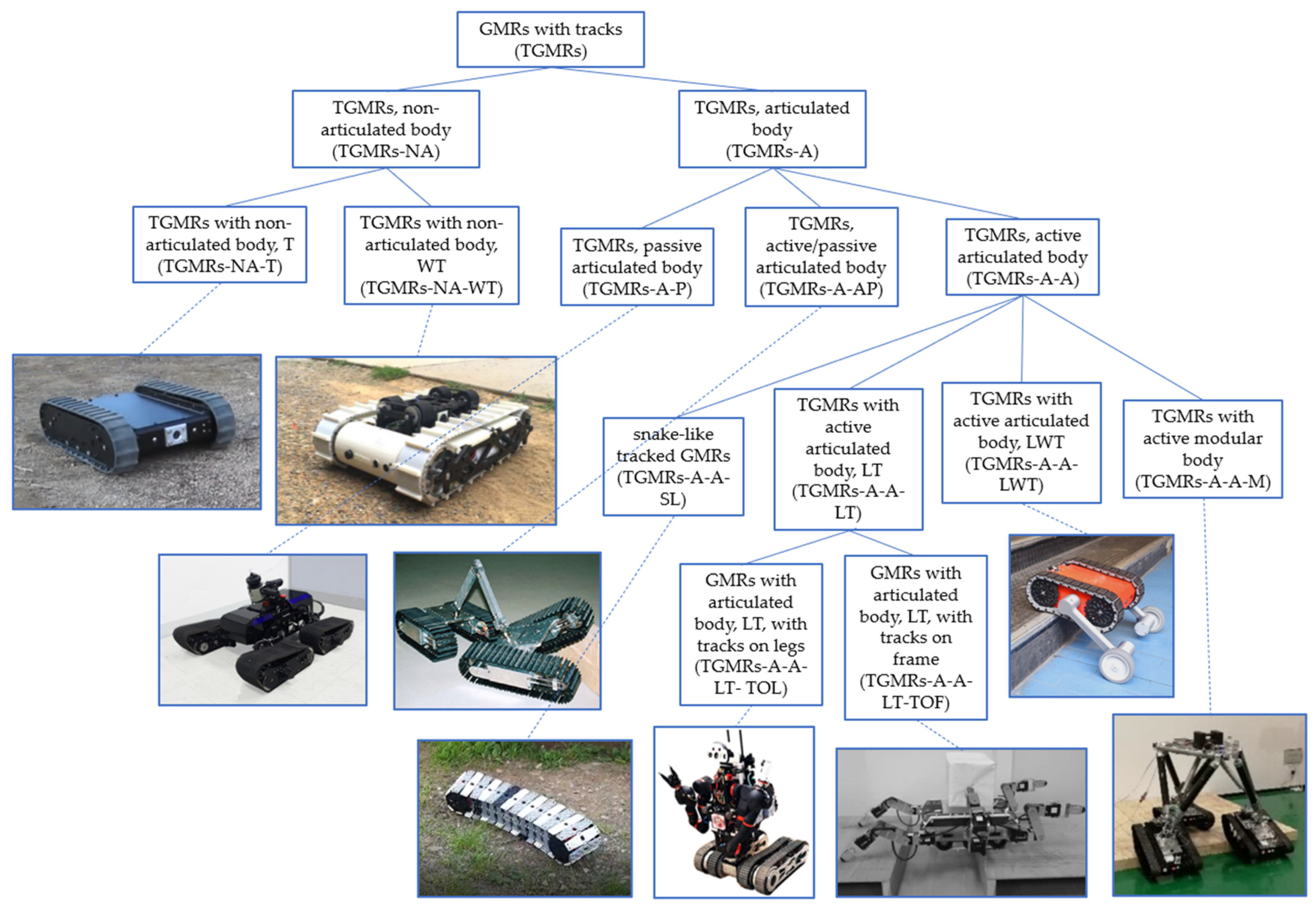
Figure 1. Taxonomy of tracked ground mobile robots based on body architecture.
2.2. Ground Mobile Robots with Tracks, Non-Articulated Body
The category of TGMRs-NA is very widespread. Many small-scale TGMRs equipped with two tracks performing differential steering are available on the market for surveillance and inspection tasks; an example is the Trackbot by Inspectorbots ([1], the TGMR-NA-T in Figure 1). The benefits of this architecture are its extreme mechanical simplicity, and the consequent reliability and ease of control. Moreover, if the robot is symmetric with the tracks thicker than the robot body (as for the Trackbot), and has no payload mounted externally, it can operate even after a capsize. The main limitation of TGMRs-NA is their limited capability of overcoming high obstacles, steps, and stairs: to start the climbing maneuver, the height of the obstacle at the initial contact point must be lower than the track radius, even if this condition is not strictly mandatory, depending on the friction conditions and on the position of the robot’s center of gravity. Therefore, some researchers have proposed an internal mechanism to shift the longitudinal position of the robot’s center of gravity, improving the step climbing capabilities [2] (Dyjob robot, Figure 2); the obvious drawback is the weight increase and the reduction of the internal room for hosting the payload.
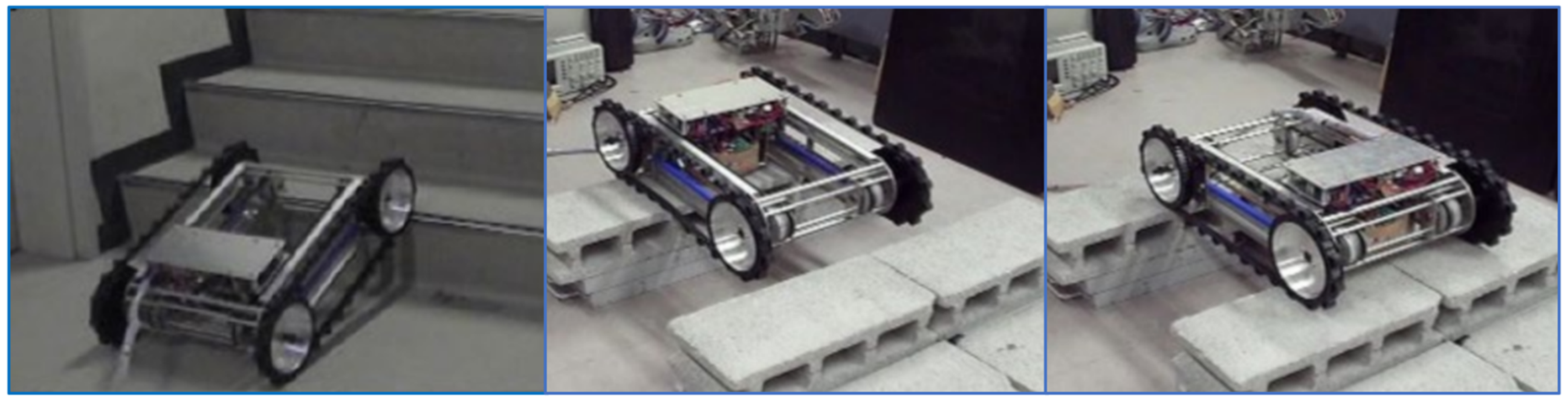
Figure 2. Dyjob robot, TGMR-NA with movable center of gravity: the center of gravity can be moved longitudinally to face the first step of a stair (left) or to maintain stability during gap traversing (center and right).
The TGMRs-NA scheme can be modified with the addition of retractable wheels, giving rise to hybrid wheel-track architectures (TGRMs-NA-WT), capable of faster wheeled locomotion whenever tracks are not required. An example is the TGMR-NA-WT in Figure 2 [3]; this symmetric robot can switch locomotion mode by extracting four wheels on both sides of its body thanks to an actuated slider, achieving full operativity after a capsize and maximum maneuverability, with yaw axis mobility, on flat and compact grounds.
2.3. Ground Mobile Robots with Tracks, Articulated Body
With regard to tracked robots with articulated body (TGMRs-A), it can be distinguished among:
-
TGMRs with passive articulated body (TGMRs-A-P), in which all the degrees of freedom of the body are passive;
-
TGMRS with active/passive articulated body (TGMRs-A-AP), in which some degrees of freedom of the body are actuated while other are passive;
-
TGMRS with active articulated body (TGMRs-A-A), in which all the degrees of freedom of the body are actuated.
The TQTMR (Tiltable Quad-Tracked Mobile Robot) is an example of TGMR-A-P ([4], the TGMR-A-P in Figure 2); this robot consists of four driving tracks, connected to two rocker links by two-degrees-of-freedom (pitch-roll) passive joints. Such a configuration is effective in terms of traction, maneuverability, and adaptability to terrain unevenness, while maintaining low control complexity.
The active articulation of the body (TGMRs-A-A) can be obtained by different approaches. A possible biologically-inspired design leads to snakelike tracked robots (TGMRs-A-A-SL), suitable for inspection in narrow spaces. Some researchers have proposed snakelike tracked robots endowed with a single peripheral track rotating around a vertebral column, which can bend actively in the horizontal plane for steering, and actively or passively in the vertical plane to adapt to ground unevenness. Examples are the FMT (Flexible Mono-Track) [5] and SnakeTrack ([6], the TGMR-A-A-SL in Figure 2). The main hindrances to the development of this design concept are the reliability of the guidance of the track when the vertebral column is steered, and the difficult placement of cameras for vision and navigation. To solve the last issue, in the SnakeTrack the track modules are characterized by central holes which allow intermittent vision while the track rotates.
Another possible approach for composing snakelike robots is to put tracked modules in series. For example, the modular robot proposed in [7] is characterized by a high number of actuated degrees of freedom to allow a flexible adaptation to a given terrain, but it requires very complex controls. Moreover, a general limitation of snakelike tracked robots is their inability to perform yaw rotations, and to follow trajectories with sharp edges.
Besides snakelike tracked robots, which are relatively rare, TGMRs with active articulated body (TGMRs-A-A) can be divided into:
-
Hybrid leg-track robots (TGMRs-A-A-LT);
-
Hybrid leg-wheel-track robots (TGMRs-A-A-LWT);
-
TGMRs with active modular body (TGMRs-A-A-M).
In the first case, the legs can be tracked extensions of the robot main body (TGMRs-A-A-LT-TOL, Tracks On Legs) or non-tracked and connected to the main frame (TGMRs-A-A-LT-TOF, Tracks On Frame). The TGMRs-A-A-LT-TOL category includes many commercial realizations for homeland, military, or surveillance applications. Examples are the PackBot, with two tracked swing extensions (flippers) on the front [8], or other general-purpose tracked platforms with double (front and rear) flippers [9][10]. For instance, the Quince GMRs (Figure 3) are characterized by four front and rear tracked rotating legs (double flippers), and have been adopted for unmanned exploration missions inside the buildings of the Fukushima nuclear power plant [11]. Architectures with active flippers are widely used due to their relatively simple mechanics, with higher obstacle crossing capability and operative flexibility, and without a significant increase of control complexity with respect to TGMRs-NA, thus allowing easy man-in-the-loop navigation.
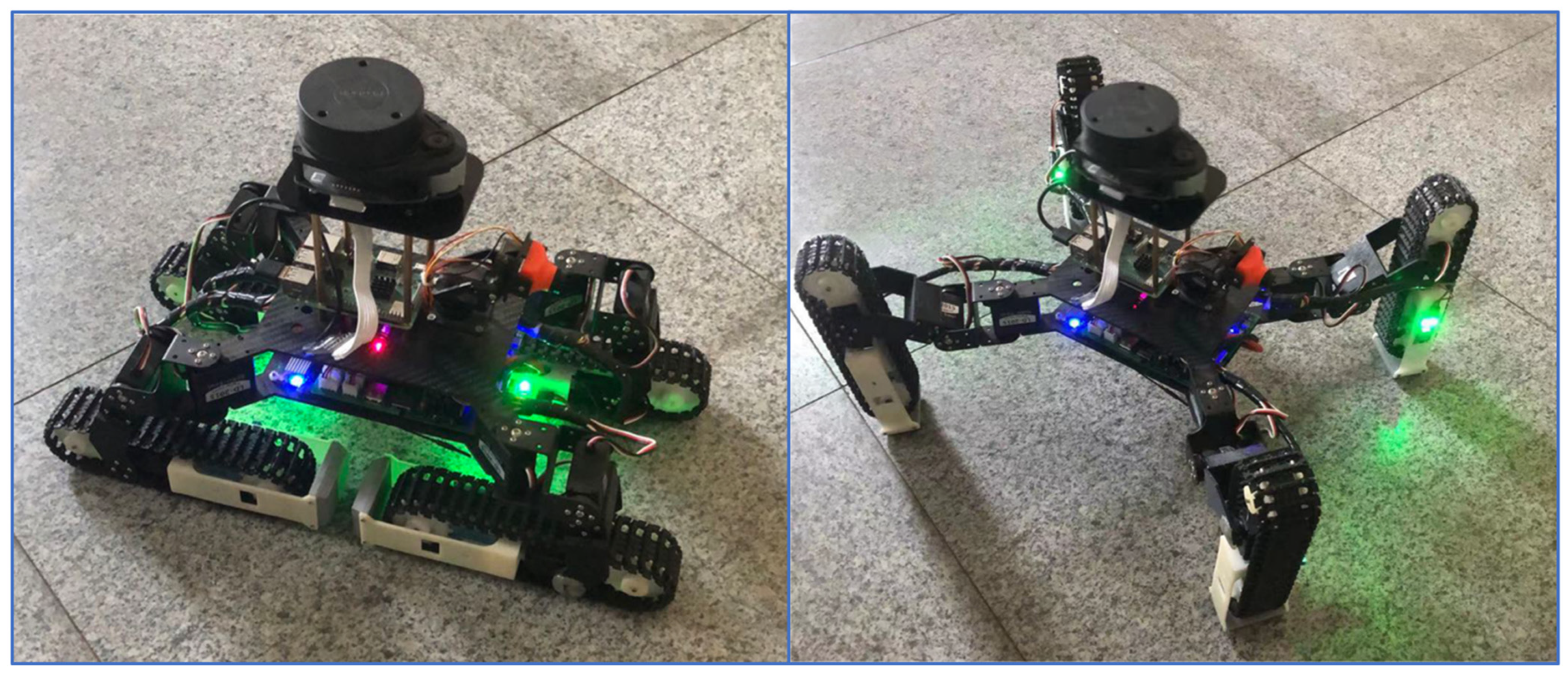
Figure 3. TALBOT, a quadruped robot with 3-DOF legs, in tracked mode (left) and in legged mode (right).
As already mentioned, the second subcategory of TGMRs-A-A-LTs is represented by tracked robots in which the operative flexibility is augmented by means of additional legs connected to the main frame (TGMRs-A-A-LT-TOF). For example, the hexapod robot presented in [12] (the TGMR-A-A-LT-TOF in Figure 1) is equipped with six four-degrees-of-freedom legs and two differential steering tracks, and is designed to traverse wide gaps; moreover, a quadruped gait involving only the front and rear legs can be adopted, while using the two middle legs to pick and carry objects under the robot body.
When wheels are also added to the hybrid locomotion system, giving rise to the TGMRs-A-A-LWT category, the design objective is to exploit the speed, energetic efficiency, and maneuverability of wheeled locomotion on flat and compact grounds. An example is the Kylin robot, derived from a double flipper robot with the addition of idle wheels at the four flipper ends, and of two actuated wheels whose axes are fixed to the two front flippers [13]; depending on the flipper angles, the robot can be suspended on the tracks or on four wheels (two actuated and two idle, for differential steering). Also, the WheTLHLoc robot [14] (the TGMR-A-A-LWT in Figure 1) belongs to the TGMRs-A-A-LWT category, having two tracks for differential steering and two rotating legs with actuated wheels at their ends; moreover, two idle omni wheels are placed on the robot’s rear. The robot has three locomotion modes: purely wheeled, remaining suspended on the actuated wheels and one omni-wheel, for higher speed and range, purely tracked, and, finally, a mixed mode in which, combining the motion of legs, wheels, and tracks, the robot can climb obstacles, steps, and stairs higher than the robot itself. Moreover, the robot is fully symmetric and can continue operating after a capsize.
The fourth subcategory of TGMRs-A-A is represented by tracked modules connected by a mechanism comprising actuated and passive joints, realizing a parallel kinematics system (TGMRs-A-A-M). In [15] a multi-robot system, composed of tracked modules connected by a parallel manipulator capable of carrying a payload is proposed (the TGMR-A-A-M in Figure 1). Even if interesting from a scientific point of view, such solutions don’t seem to have real advantages compared to simpler and more compact architectures in terms of operative flexibility.
3. Classification of Track Profiles
Considering the track profile, TGMRs can be divided into three categories (Figure 4):
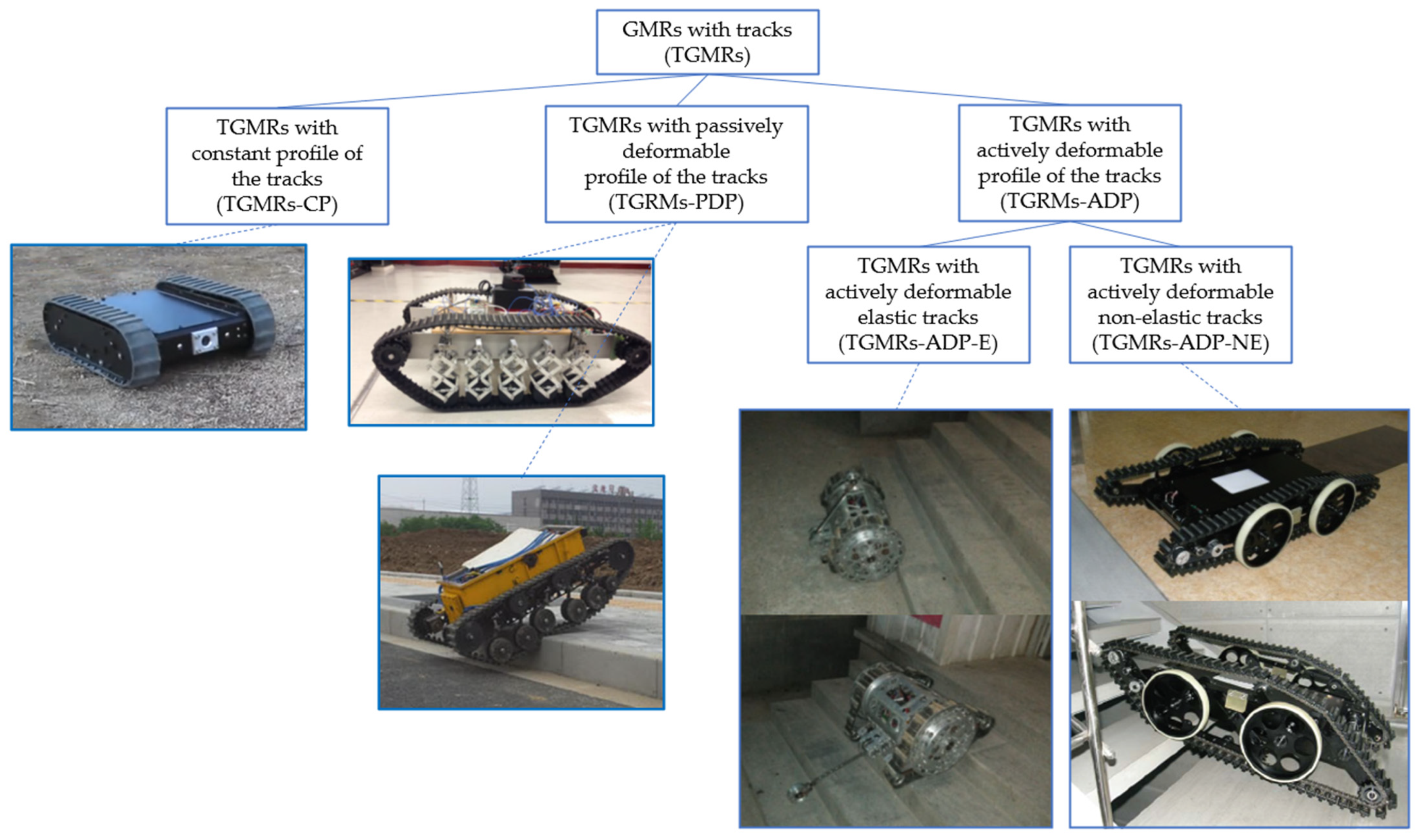
Figure 4. Taxonomy of tracked ground mobile robots based on track profile.
-
TGMRs with constant profile of the tracks (TGMRs-CP);
-
TGMRs with passively deformable profile of the tracks (TGMRs-PDP);
-
TGMRs with actively deformable profile of the tracks (TGMRs-ADP).
Let us note that even the track profile of robots belonging to the first category (TGMRs-CP) is not exactly constant, due to the unavoidable deformations of the tracks subject to gravity, contact forces with the terrain, and internal reactions (contacts with sprockets, idler sprockets, and carrier rollers). Nevertheless, the track supporting structure is designed to keep its shape constant, maintaining invariant the gross track profile. On the contrary, in the other two categories, the large variations of the track profiles, based on deformations in the geometry of the track-supporting structure, are functional features planned in the design phase. Most tracked robots belong to the TGMRs-CP category; for example, all the robots shown in Figure 1 are TGMRs-CP.
While in TGMRs-PDP, the deformation of the track is determined by the distribution of the interaction forces between tracks and terrain, in TGMRs with actively deformable tracks (TGMRs-ADP), the shape change is commanded by actuators. There are two possible approaches to varying the track shape: with the first approach (TGMRs-ADP-E) the length of the track varies thanks to its elasticity; with the second approach (TGMRs-ADP-NE), the track profile varies but the track does not undergo macroscopic elongations.
The architecture proposed in [16] for stair climbing is a TGMR-ADP-NE characterized by a single track on each side, even if the robot body is divided into two parts connected by a revolute joint; therefore, the contact between tracks and sprockets must be maintained by an upper guidance system, thus losing symmetry for full operativity after a capsize.
4. Classification of Track Types
On the basis of track realization, TGMRs can be classified as (Figure 5):
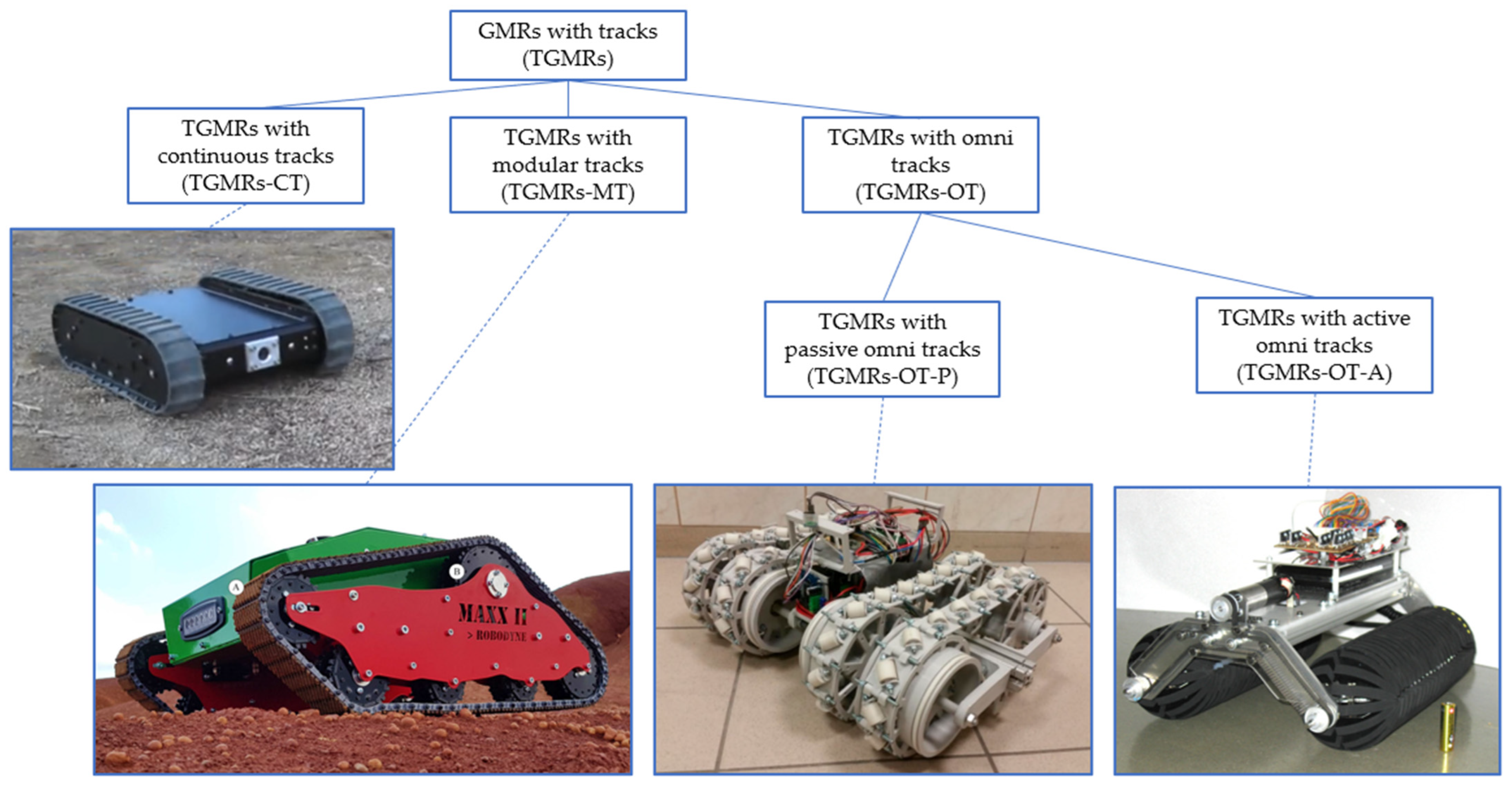
Figure 5. Taxonomy of tracked ground mobile robots based on track type.
-
TGMRs with continuous tracks (TGMRs-CT);
-
TGMRs with modular tracks (TGMRs-MT);
-
TGMRs with omni tracks (TGMRs-OT).
Rubber continuous tracks are indeed the most widespread for robotic applications. For small-scale TGMRs, rubber continuous tracks without internal braiding are acceptable since the longitudinal structural stresses are small; moreover, their application is mandatory for TGMRs with actively deformable elastic tracks (TGMRs-ADP-E). For heavier TGMRs, rubber tracks with textile or steel internal braiding are adopted, technologically similar to the tracks of small excavators and tracked vehicles. Continuous tracks have several advantages: extreme robustness to shocks and impacts, very good traction on soft and yielding terrains, and optimum capability of operating on sandy and muddy grounds.
Rubber continuous tracks are usually characterized by protrusions to increase traction on soft and irregular terrains; sometimes flat continuous tracks are adopted to join two functions: locomotion and compacting of bulk materials. For instance, in [17] a special-purpose service tracked robot is presented, capable of moving inside a truck container, and rolling over flax raw material to compress it, increasing its bulk density (Figure 6 left).

Figure 6. TGMR-CT with flat tracks for flax raw material compacting (left); TGMR for pipe inspection with magnetic locomotion (right).
With regard to modular tracks, composed of modules connected by revolute joints, heavy vehicles usually adopt steel tracks, while for small robots the most common realization is based on high-strength plastic materials. Compared to rubber continuous tracks, the robustness to shocks and impacts is lower and there is a higher risk of locking on sandy and muddy terrains; on the other hand, the motion resistance due to the internal friction of the tracks is usually lower, and mounting and dismounting for maintenance is easier. Therefore, plastic modular tracks are usually adopted for small-size and lightweight TGMRs, as in [14], in which the structural resistance is not critical, to maximize the energetic efficiency. Nevertheless, there are examples of applications of modular tracks to larger TGMRs, such as the MAXXII, a mid-sized robot (length: 1 m, width: 0.7 m, mass: 40 kg, Figure 5), used for soil characterization through its passive suspension system, which is used as sensing device ([18], the TGMR-MT in Figure 5).
Sometimes, the modular realization allows the development of special-purpose tracks, tailored for particular applications. For instance, in [19] a small lightweight robot (186 × 125 × 51 mm, 200 g) with biologically-inspired spined track modules is proposed; to detach the spines from the surface, a mechanism is introduced to imitate the foot attaching and detaching movements of insects. The experimental tests have shown that the robot is capable of climbing on sandpaper, brick, coarse stucco, and pebble walls. Also, the robot proposed in [20] is small and lightweight (330 × 170 × 80 mm, 860 g), and has been designed using a biomimetic approach. It can climb concrete and brick walls using tracked-spines arrays located around the tracks. The robot uses a combination of the crank-link mechanism and gear transmission to control the tracked spines on both sides of the robot to grasp the asperities, climbing almost vertical walls.
Another very specific application of tracked robots with modular tracks is internal pipe climbing and inspection. For instance, in [21] a robot with three parallel track modules placed at 120° with axial symmetry around the robot’s longitudinal axis is discussed. During operation, an adequate contact force between the tracks and the internal pipe surface is granted by radial springs carrying the track modules. The operativity of this robot is evidently limited to a strict range of the pipe diameters. On the contrary, other robots for pipe inspection, equipped with magnetic modular tracks, can operate in larger pipes with different diameters, but obviously only in ferromagnetic material. For instance, the robot presented in [22] is equipped with two parallel tracks properly articulated to adapt to different pipe diameters and to improve maneuverability (Figure 6 right). In any case, pipe inspection robots are usually designed for this particular environment, and even if they can walk over different terrains, they cannot be considered general-purpose inspection platforms.
The third category based on track type is represented by TGMRs with omnidirectional tracks (TGMRs-OT), which can be further divided into robots with passive (TGMRs-OT-P) or active (TGMRs-OT-A) omnidirectional tracks. The functioning principle of omnidirectional tracks is similar to the one of omnidirectional wheels of Mecanum wheels [23]. A robot equipped with Mecanum wheels is holonomic, therefore the number of controlled degrees of freedom is equal to the number of degrees of mobility in the plane. This is particularly useful when the robot is required to operate in very limited spaces, moving in any direction. For instance, forklifts and transport robots with Mecanum wheels are adopted in storage facilities and production halls in which the organization of the spaces is of fundamental importance. On the other hand, Mecanum wheels also have considerable drawbacks. First of all, they have to operate preferably on flat, even, and clean surfaces. Moreover, their resistance to shocks and impacts is limited. Some researchers have proposed hybrid combinations of Mecanum wheels and tracks [24] (the TGMR-OT-P in Figure 5), realizing multidirectional tracks which have the same maneuverability advantages of the Mecanum wheels robot and better traction on uneven terrains, shock resistance, and capability of carrying loads, thanks to the higher number of rollers in contact with the terrain, and to the elasticity of the tracks. Nevertheless, due to the presence of rollers, the TGMRs-OT-P have still operative limitations in harsh environments.
An example of a TGMRs-OT-A is discussed in [25] (the TGMR-OT-A in Figure 5). Its architecture is characterized by two crawlers with a circular section; these crawlers have active rolling axes aligned with the longitudinal axis of the robot, to perform sideling motion whenever necessary while maintaining a large contact surface for motion on soft and yielding terrains. Even if there are no rollers directly in contact with the terrain as in TGMRs-OT-P, this locomotion system still suffers limitations due to the complex mechanical design of the crawlers.
References
- Surveillance Security Robots Robotic Platform. Available online: https://www.inspectorbots.com/Home.html (accessed on 22 June 2022).
- Fukuoka, Y.; Oshino, K.; Ibrahim, A.N. Negotiating Uneven Terrain by a Simple Teleoperated Tracked Vehicle with Internally Movable Center of Gravity. Appl. Sci. 2022, 12, 525.
- Ben-Tzvi, P.; Saab, W. A Hybrid Tracked-Wheeled Multi-Directional Mobile Robot. J. Mech. Robot. 2019, 11, 1–10.
- Kim, J.; Kim, J.; Lee, D. Mobile Robot with Passively Articulated Driving Tracks for High Terrainability and Maneuverability on Unstructured Rough Terrain: Design, Analysis, and Performance Evaluation. J. Mech. Sci. Technol. 2018, 32, 5389–5400.
- Haji, T.; Kinugasa, T.; Yoshida, K.; Amano, H.; Osuka, K. Experiment of Maneuverability of Flexible Mono-Tread Mobile Track and Differential-Type Tracked Vehicle. Ind. Robot. 2010, 37, 263–272.
- Nodehi, S.E.; Bruzzone, L.; Fanghella, P. SnakeTrack, A Bio-inspired, Single Track Mobile Robot with Compliant Vertebral Column for Surveillance and Inspection. Mech. Mach. Sci. 2022, 120, 513–520.
- Neumann, M.; Predki, T.; Heckes, L.; Labenda, P. Snake-like, Tracked, Mobile Robot with Active Flippers for Urban Search-and-Rescue Tasks. Ind. Robot. 2013, 40, 246–250.
- Han, X.; Lin, M.; Wu, X.; Yang, J. Design of An Articulated-Tracked Mobile Robot with Two Swing Arms. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 684–689.
- Mitriakov, A.; Papadakis, P.; Kerdreux, J.; Garlatti, S. Reinforcement Learning Based, Staircase Negotiation Learning: Simulation and Transfer to Reality for Articulated Tracked Robots. IEEE Robot. Autom. Mag. 2021, 28, 10–20.
- Yuan, Y.; Xu, Q.; Schwertfeger, S. Configuration-Space Flipper Planning on 3D Terrain. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 318–325.
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Tadokoro, S.; Nishimura, T.; Yoshida, T. Redesign of Rescue Mobile Robot Quince—Toward Emergency Response to the Nuclear Accident at Fukushima Daiichi Nuclear Power Station on March 2011. In Proceedings of the 9th IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 13–18.
- Sasaki, T.; Fujita, T. Gap Traversing Motion via a Hexapod Tracked Mobile Robot Based on Gap Width Detection. J. Robot. Mechatron. 2021, 33, 665–675.
- Hong, S.; Wu, M.; Xiao, J.; Xu, X.; Lu, H. Kylin: A Transformable Track-Wheel Hybrid Robot. In Proceedings of the International Conference on Advanced Mechatronic Systems (ICAMechS 2018), Zhengzhou, China, 30 August–2 September 2018; pp. 7–12.
- Bruzzone, L.; Baggetta, M.; Nodehi, S.E.; Bilancia, P.; Fanghella, P. Functional Design of a Hybrid Leg-Wheel-Track Ground Mobile Robot. Machines 2021, 9, 10.
- Gong, Z.; Xie, F.; Liu, X.J.; Shentu, S. Obstacle-Crossing Strategy and Formation Parameters Optimization of a Multi-Tracked-Mobile-Robot System with a Parallel Manipulator. Mech. Mach. Theory 2020, 152, 103919.
- Zong, C.; Ji, Z.; Yu, H. Dynamic Stability Analysis of a Tracked Mobile Robot Based on Human–Robot Interaction. Assem. Autom. 2020, 40, 143–154.
- Galati, R.; Mantriota, G.; Reina, G. Design and Development of a Tracked Robot to Increase Bulk Density of Flax Fibers. J. Mech. Robot. 2021, 13, 1–10.
- Galati, R.; Reina, G. Terrain Awareness Using a Tracked Skid-Steering Vehicle with Passive Independent Suspensions. Front. Robot. AI 2019, 6, 1–11.
- Liu, Y.; Liu, S.; Wang, L.; Wu, X.; Li, Y.; Mei, T. A Novel Tracked Wall-Climbing Robot with Bio-inspired Spine Feet. In Proceedings of the International Conference on Intelligent Robotics and Applications ICIRA 2019, Shenyang, China, 8–11 August 2019; pp. 84–96.
- Shi, J.; Xu, L.; Liu, J.; Cheng, G.; Liang, X.; Liu, L.; Chen, S.; Xu, H. Design, Simulation and Experimentation of a Biomimetic Wall-Climbing Robot with Tracked Spines. In Proceedings of the 2020 IEEE International Conference on Power, Intelligent Computing and Systems, ICPICS 2020, Shenyang, China, 28–30 July 2020; pp. 744–750.
- Kumar, V.; Agarwal, S.; Vadapalli, R.; Govindan, N.; Krishna, K.M. Design and Analysis of Modular Pipe Climber-III with a Multi-Output Differential Mechanism. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Delft, The Netherlands, 12–16 July 2021.
- Bogdan, P.A.; Wheadon, J.; Klein, F.B.; Gianni, M. Magnetic Tracked Robot for Internal Pipe Inspection. In Proceedings of the 10th European Conference on Mobile Robots, Bonn, Germany, 31 August–3 September 2021.
- Taheri, H.; Zhao, C.X. Omnidirectional Mobile Robots, Mechanisms and Navigation Approaches. Mech. Mach. Theory 2020, 153, 103958.
- Fiedeń, M.; Bałchanowski, J. A Mobile Robot with Omnidirectional Tracks—Design and Experimental Research. Appl. Sci. 2021, 11, 11778.
- Tadakuma, K.; Tadakuma, R.; Nagatani, K.; Yoshida, K.; Iagnemma, K. Crawler Mechanism with Circular Section to Realize a Sideling Motion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008.
More
Information
Subjects:
Automation & Control Systems
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
3.0K
Revisions:
3 times
(View History)
Update Date:
26 Aug 2022
Table of Contents



Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No