Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Simon Ecke | -- | 2534 | 2022-07-22 17:28:41 | | | |
| 2 | Catherine Yang | Meta information modification | 2534 | 2022-07-27 05:55:22 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.; Tiede, D.; Seifert, T. UAV-Based Forest Health Monitoring. Encyclopedia. Available online: https://encyclopedia.pub/entry/25447 (accessed on 10 June 2026).
Ecke S, Dempewolf J, Frey J, Schwaller A, Endres E, Klemmt H, et al. UAV-Based Forest Health Monitoring. Encyclopedia. Available at: https://encyclopedia.pub/entry/25447. Accessed June 10, 2026.
Ecke, Simon, Jan Dempewolf, Julian Frey, Andreas Schwaller, Ewald Endres, Hans-Joachim Klemmt, Dirk Tiede, Thomas Seifert. "UAV-Based Forest Health Monitoring" Encyclopedia, https://encyclopedia.pub/entry/25447 (accessed June 10, 2026).
Ecke, S., Dempewolf, J., Frey, J., Schwaller, A., Endres, E., Klemmt, H., Tiede, D., & Seifert, T. (2022, July 22). UAV-Based Forest Health Monitoring. In Encyclopedia. https://encyclopedia.pub/entry/25447
Ecke, Simon, et al. "UAV-Based Forest Health Monitoring." Encyclopedia. Web. 22 July, 2022.
Copy Citation
Technological advances have led to the increasing use of unmanned aerial vehicles (UAVs) for forestry applications. One emerging field for drone application is forest health monitoring (FHM). Common approaches for FHM involve small-scale resource-extensive fieldwork combined with traditional remote sensing platforms. UAVs have shown that they can meet the demands of flexible operation and high spatial resolution. This is also reflected in a rapidly growing number of publications using drones to study forest health.
unmanned aerial vehicle
stress detection
forest health monitoring
1. UAV Remote Sensing: An Emerging Tool in Forest Health Monitoring
To assess the severity and the spatial extent of the consequences of tree stress, FHM is necessary. Timely knowledge of forest health decline might enable forest management to mitigate or reduce the damage to the forest (e.g., pest treatment, fire prevention) as well as to the ecosystem services attached to it (e.g., timber production, drinking water purification) [1][2].
Long-term in situ monitoring of forest health has been carried out already for several decades at local, regional, and global scales in which standardized forest health indicators have been included [3]. In the process, typically ground-truth information is collected by trained forestry staff that indicates an external state of health or damage. A common procedure is the estimation of the loss of needles and leaves, which is recorded in 5% intervals based on site-specific example trees [4][5]. The ICP Forest program is a European collaboration of 42 participating countries and provides a standardized framework for the assessment and monitoring of forests in Europe and beyond [6]. They act on two different intensity levels, namely, level-1 monitoring, which includes 5714 inventory plots (as of 2020) based on a systematic grid throughout Europe to assess temporal variations of the forest condition, and the level-2 monitoring, which investigates 623 plots (as of 2018) to identify cross-correlations between environmental factors and the responses of forests in selected ecosystems [7]. For a detailed overview of other national and international in situ FHM programs, please refer to [3].
A high degree of uncertainty is to be expected of in situ ground surveys as the quality depends on the experience and the subjective individual perception of the observers. Given that these are logistically complex, time-consuming, cost and labor-intensive ground surveys, only feasible at the plot-scale [8], it is not surprising that remote sensing (RS) has established itself as a part of FHM and its research and has made major contributions to this application field [3][9][10][11][12]. RS enables the acquisition of forest health indicators based on spectral or structural features derived from sensor data in an objective, quantitative, and repetitive manner at multiple spatial scales [10].
Unmanned aerial vehicles (UAVs), sometimes referred to as drones or unmanned aircraft (UA), are remotely piloted carrier platforms and are increasingly being used as RS tools in various forestry applications [13][14]. The terms unmanned aircraft system (UAS) and, less frequently, remotely piloted aircraft system (RPAS), considering the UAV as part of an entire operating system, including the equipment needed to control it remotely, have been widely adopted [15]. Important to note is that the Department of National Defence and Canadian Armed Forces (DND/CAF) has exchanged the term “unmanned air vehicle” to “uncrewed air vehicle” to ensure a gender neutral terminology [16]. Other nations should consider a similar approach.
Satellite-based RS still dominates forest health research. The most frequently used data are publicly accessible imagery such as Landsat, MODIS, and Sentinel [17]. The large area coverage makes satellites valuable tools at multiple scales. Nevertheless, both the temporal and spatial resolution of satellite RS for monitoring forest ecosystems are sometimes insufficient and reach the limits of feasibility [18]. This is particularly the case when biotic or abiotic factors trigger responses that lead to rapidly changing processes in forests and thus detrimentally affect forest health [19][20]. In such cases, up-to-date and regularly acquired information becomes a key requirement [21]. Besides timeliness, a very high spatial resolution is also critical in sustainable forest management [22].
In theory, crewed aircraft can meet these requirements. In practice, though, safety issues, logistical limitations and very high costs make them viable only for relatively large areas [23]. It is precisely in this niche in forestry where drones are increasingly used and are therefore seen less as a competitor than as a complementary technology to existing traditional Earth observation platforms [24]. While inferior to satellites and crewed RS platforms in terms of area coverage, they are unrivaled in spatial resolution, cost-efficiency, flexibility, and frequent revisit times, provided the area of interest is relatively small in size [25]. Common area coverage ranges from one hectare to several square kilometers in a single flight. The exact area coverage depends on the UAV type, propulsion technology (electricity/fuel), camera type, and other circumstances, such as rugged terrain (mountainous regions) or accessibility. A comparison of crewed aircraft and UAVs distributed by spatial resolution, costs per m2 and area coverage can be seen in Figure 1. In addition, the regulations of UAV operation of the respective country need to be considered, which can limit the maximum allowed flight height above ground level and thus also may influence the possible area coverage.
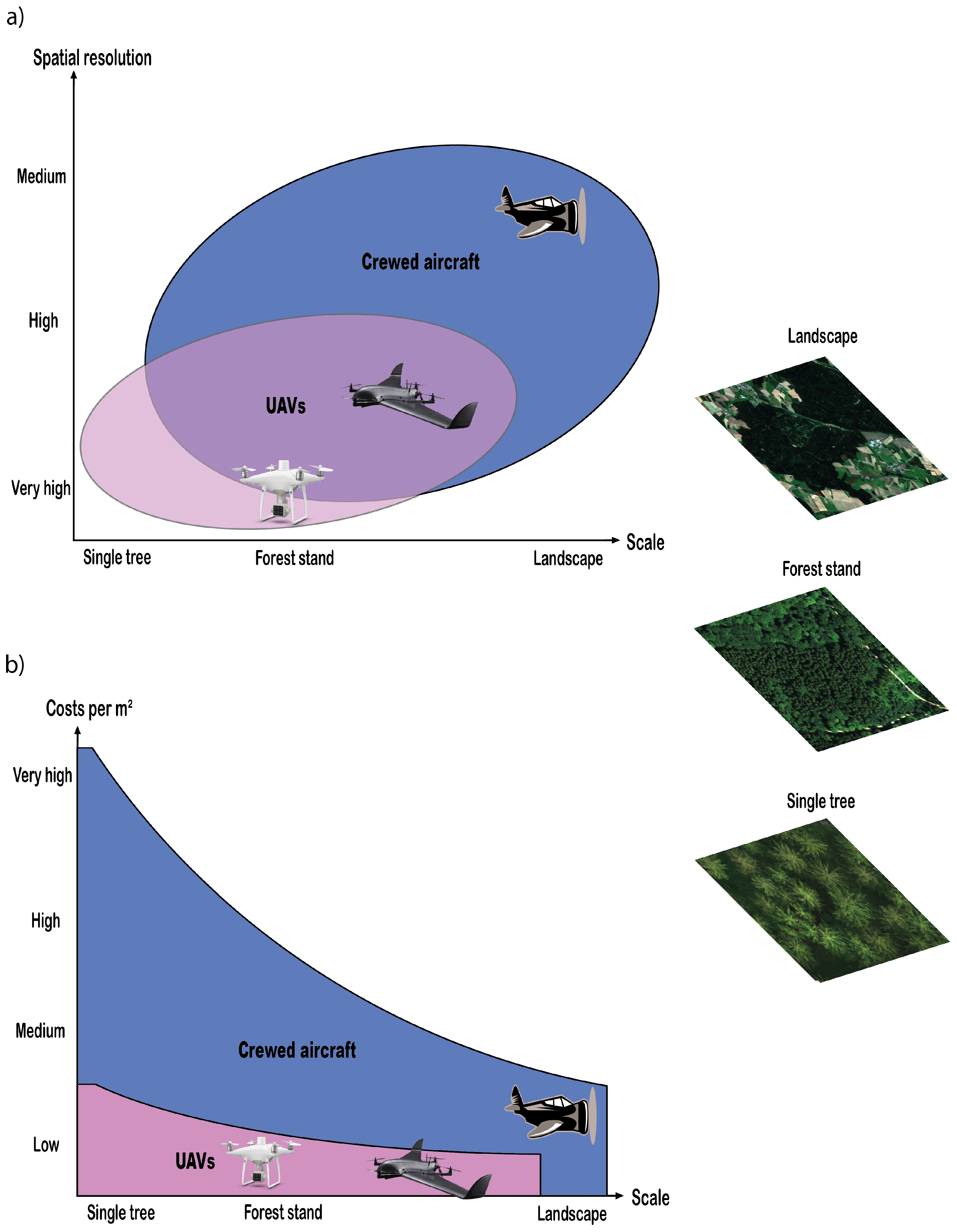
Figure 1. Abstraction of the distribution of potentially beneficial use cases of crewed aircraft and different UAV types used for remote sensing in forestry: (a) by scale and spatial resolution, (b) by scale and costs per m2. Note: within the overlap area in the top graph, UAVs often have a significant cost advantage over crewed aircraft and are faster and more frequently deployable. Multirotor drones are easier to handle compared to fixed-wing aircraft, but are only suitable for relatively small areas.
2. UAV Types and Sensors for Forest Health Monitoring
UAVs can generally be controlled manually and perform predetermined flight missions autonomously. For a general UAV workflow for data acquisition see Figure 2.
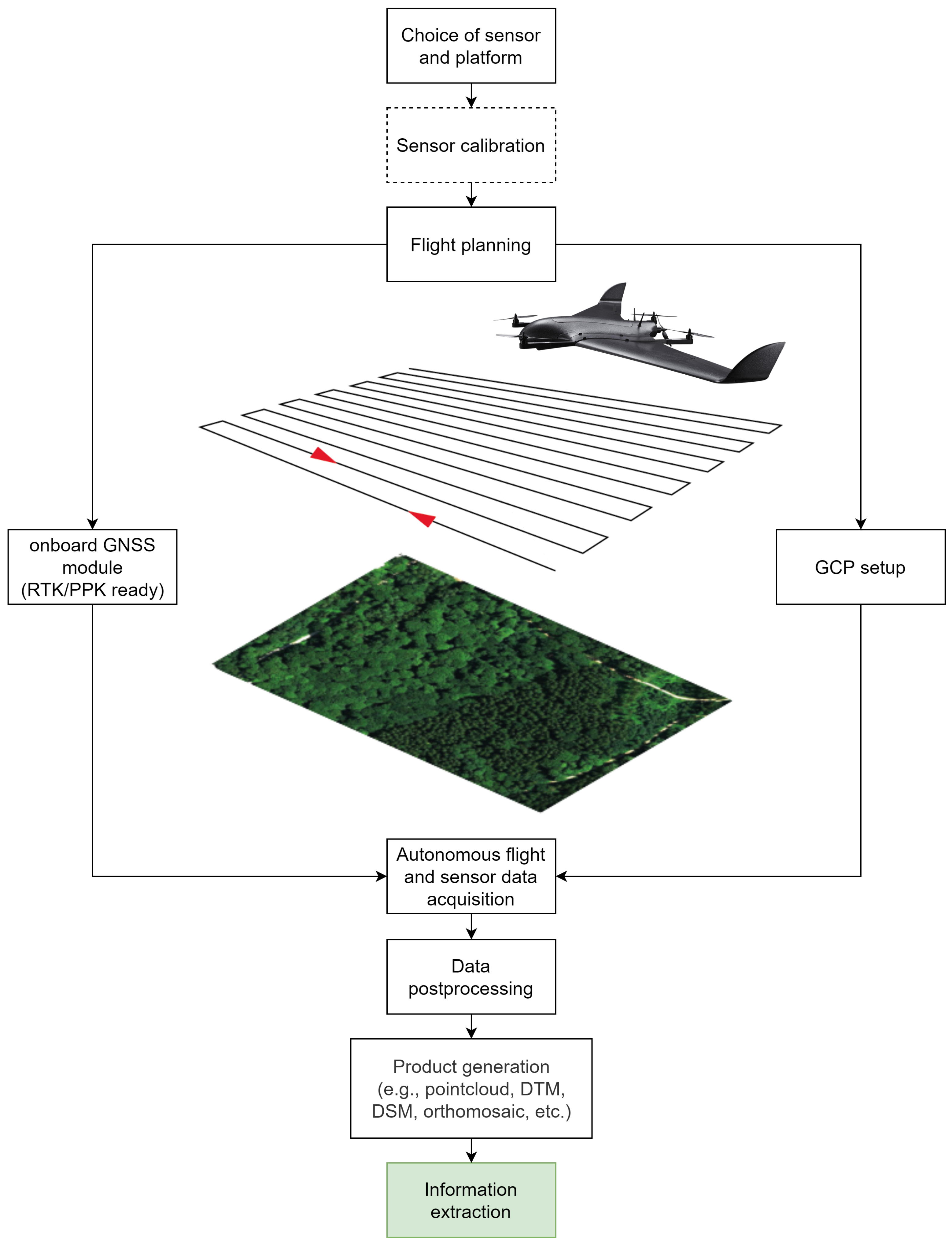
Figure 2. General workflow of UAV-based data acquisition and processing procedures.
The platforms themselves come in various sizes (small, mini, and micro) and shapes, with maximum take-off weights (MTOW) most likely below 30 kg [26] due to legal requirements that make operation above the MTOW complicated and cumbersome [27]. Flight times vary depending on weather conditions, payload, battery power or engine fuel, and UAV type and vary from a few minutes to several hours [28]. With typical ranges not greater than 10 km [15], the legally possible capacity can usually be exhausted, as flying beyond the visual line of sight (BVLOS) is not permitted in many countries. Fixed-wing, rotary-wing, and hybrid solutions represent the major platform types that have prevailed for recent forestry applications [14]. The former has the shape of an ordinary airplane with rigid wings and benefits from its aerodynamic shape to optimize cruise efficiency. This allows it to maximize flight duration and, thus, larger areas can be covered [29]. The main drawback is that fixed-wing models require large and flat take-off and landing locations without higher obstacles [30], which can pose problems, especially in forested terrain. Moreover, operators must consider that this platform type needs a constant forward motion with a minimum speed to get sufficient air buoyancy. This could lead to motion blur, which adversely affects image quality [31].
Rotary-wing drones are most frequently embodied by multirotor models propelled by four, six, or up to eight rotors [15]. Single-rotor models (helicopters) are still being used in a few cases [32]. Multirotor UAVs are capable of vertical take-off and landing (VTOL) are much more maneuverable and responsive, allowing operators to launch even in locations with constrained space. They are easier to handle and are generally more versatile in their applications [33]. The ability to fly slowly around objects or hover in place opens up additional applications such as data capturing for fine three-dimensional modeling where detailed multiview side images are necessary [13][34][35]. However, all of this comes at the expense of higher energy consumption [36]. Hence, only small areas are feasible with a multirotor drone compared to its fixed-wing equivalent. Even if more expensive, hybrid VTOL fixed-wing solutions alleviate the problem of the need for large take-off and landing areas [28], which makes them particularly interesting for forestry applications. These platforms combine rigid wings and multiple rotors that enable VTOL operation and typically transition from hover to cruise mode and back at safe altitudes. Once in the cruise mode, these UAV types benefit from the same advantages as ordinary fixed-wing models. Figure 3 shows UAV types commonly used in the forestry sector.
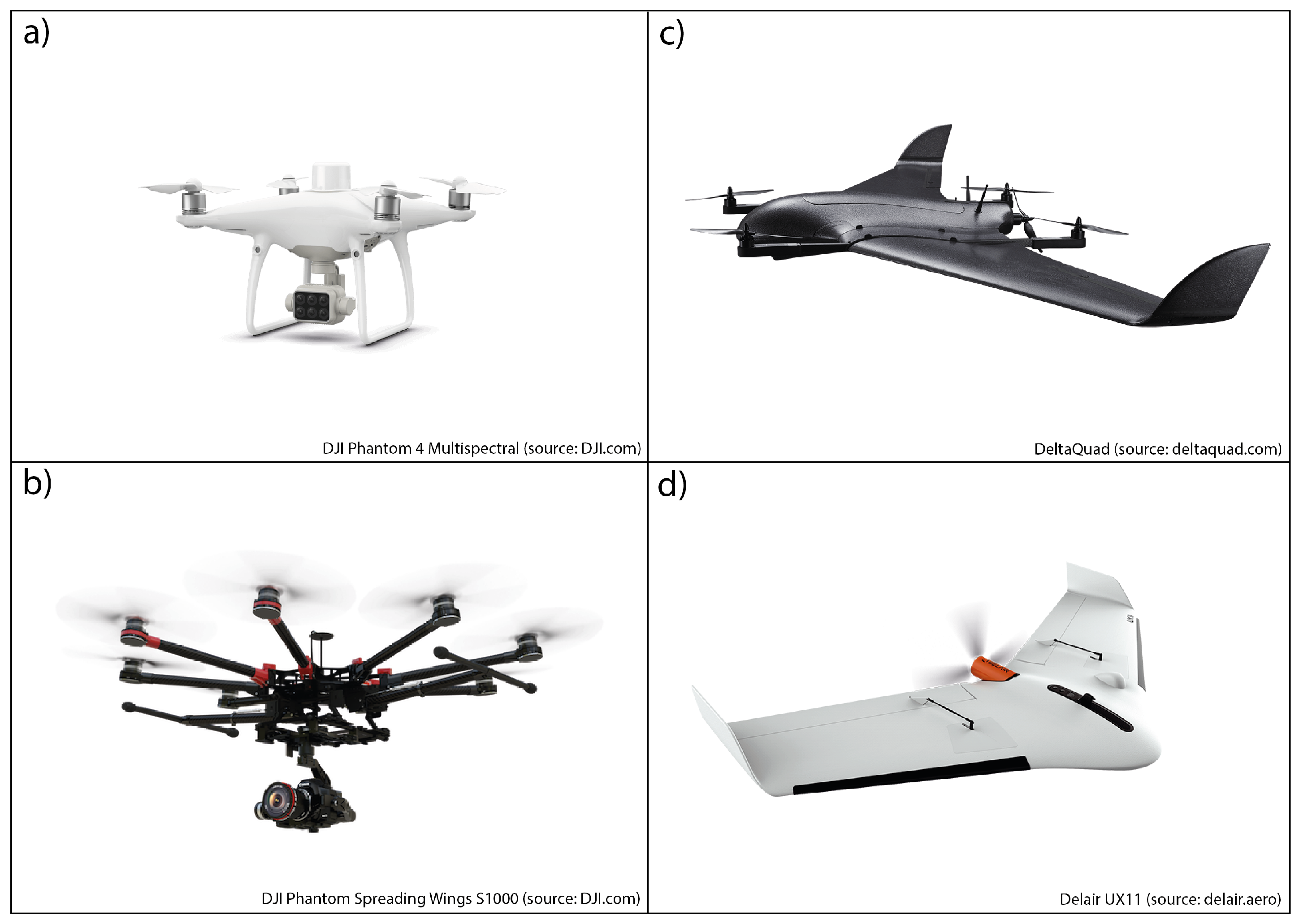
Figure 3. Different UAV types, commonly used for civilian applications: (a) rotary-wing (quadcopter), (b) rotary-wing (octocopter), (c) Hybrid VTOL solution, and (d) fixed-wing.
Technological innovations and developments have led to the increased use of UAV-RS. Contributing factors include (1) cheap, light, and miniaturized off-the-shelve UAVs and payloads [25], (2) the development of sophisticated image-matching algorithms such as semi-global matching (SGM) [37], which have paved the way for faster and more robust structure from motion (SfM)-based photogrammetry software [38], and (3) continued increases in computer capacity that made image matching feasible [39]. The emergence of SfM has enabled practitioners to produce their own georeferenced data products by using simple digital cameras [40]. In combination with UAVs, they become a powerful RS tool as a scale-appropriate application. In drone-based FHM, SfM photogrammetry provides 2D spectral data of tree crowns and corresponding 3D information that help to quantify biochemical leave compositions and structural attributes to draw conclusions about the tree’s health status [19].
Typical payloads are mainly represented by optical sensors [41]. They range from consumer-grade RGB cameras to professional multispectral, hyperspectral, and thermal cameras, which all belong to the category of passive sensors. Less frequent but by no means less important, active sensors such as light detection and ranging (LiDAR) are also being applied. Figure 4 shows examples of typical sensors for UAV application for FHM.

Figure 4. Different sensors for remote sensing applications that can be attached to UAVs: (a) RGB camera, (b) multispectral camera, (c) thermal camera, (d) hyperspectral camera, and (e) LiDAR sensor.
RGB cameras capture visible light approximately within the 400–700 nm band of the electromagnetic spectrum. Depending on the sensor and focal length, subdecimeter spatial resolutions can be achieved even from relatively high altitudes above ground when attached to drones [42]. It is common practice in RS to separate color channels to work with the individual bandwidths [43], for example, using different types of filters [44]. This allows the mathematical combination of color channels to derive band ratios that improve feature detection and provide foresters with valuable information [25]. Regarding vegetation analysis, additional bandwidths that reach beyond the visible light, such as near-infrared (NIR), are increasingly favored due to their higher sensitivity to plant pigmentation (e.g., chlorophyll and carotenoid content). Multispectral sensors consist of several separated bands (e.g., blue, green, red, red edge, NIR), usually covering the 400–1000 nm band of the electromagnetic spectrum. This allows the calculation of advanced vegetation indices that contribute to stress analysis and the evaluation of forest health [24]. Hyperspectral sensors can take the analysis of vegetation properties to a whole new level. They can cover similar spectra as multispectral sensors but significantly differ in band numbers and widths. Some consist of hundreds of narrow bands representing the electromagnetic spectrum in a much more detailed manner [45]. Thermal imaging sensors perceive emitted radiance typically between 7500 and 13,500 nm. Assuming an accurate calibration, pixel values can reliably be converted into temperature [23]. Due to technical limitations of optical sensors, the number of narrow bands of multispectral and hyperspectral cameras is coming at the expense of a lower spatial resolution [46][47]. To overcome this problem, pansharpening has become a widely used technique in RS with a variety of different pansharpening algorithms [46][47][48]. In the process, multispectral or hyperspectral imagery is merged with higher spatial resolution panchromatic imagery while preserving the multispectral/hyperspectral sensors’ spectral information and the geometrical detail of the panchromatic imagery [49][50][51]. Today, UAV-based imagery is also used to enhance the spatial resolution of satellite imagery [52][53]. Manufacturers that build specialized cameras for drones even started to supplement their multispectral cameras with panchromatic bands to enhance the spatial resolution using pansharpening techniques [54].
The group of active sensors includes, e.g., LiDAR systems. LiDAR detectors send active laser pulses in the NIR spectrum to scan the environment. The signals are backscattered by the objects (e.g., canopy and/or ground), and part of the transmitted energy returns to the sensor. The elapsed time between transmission and reception is recorded and combined with positional information, resulting in detailed point clouds containing intensity and elevation measurements [30]. Important forest health indicators such as tree crown density, pattern distribution, or structural changes over time can be derived from LiDAR-based point clouds and indicate defoliation [55][56][57] or changes in crown architecture [58]. Besides FHM, these sensors are used in various other forestry applications using drones. The 3D reconstruction of trees using RGB imagery [13] or LiDAR-based solutions [59] allow estimations of inventory parameters such as diameter measurements [60] and tree heights [61] and tree species [62], which in turn enable above-ground biomass calculations [63][64]. Furthermore, other structural information such as forest canopy gaps can be retrieved [65]. Instead, multispectral and hyperspectral sensors’ broad spectral resolution is rather used for complex vegetation properties such as chlorophyll content [45] or tree species recognition [66][67], but they are also useful tools for applications similar to those mentioned for RGB cameras. Thermal sensors are often used for wildlife [68] and forest fire [69][70] detection.
3. The Importance of Forest Health
According to the United Nations (UN), more than 80% of all land mammals, birds, insects, and plants inhabit forests. It is estimated that about one-third of humanity directly depends on forests and their products [71]. Forests provide essential ecosystem services and ecological functions, e.g., to meet social needs such as recreation, education, and conservation, as a source of fuel and wood, for water purification, for erosion control, and climate regulation through carbon storage [21][72][73]. Besides anthropogenic pressures from timber harvesting, land use, and pollution, forests are also exposed to an array of abiotic (extreme temperatures, droughts, fire, storms, snow, and ice) and biotic (e.g., pests and diseases) stressors. Moreover, some of these stress agents are likely to interact and are further exacerbated by ongoing climate change [74]. Seidl et al. [75] concluded that warmer and drier climate leads to a favorable environment for fire, droughts, and insects, whereas warmer and wetter conditions foster storms and pathogens. As healthy forests are more robust and resilient to disturbances, it is critical to maintain and bolster their key functions [9][76].
The term forest health cannot be defined unambiguously, as it reflects values from social, economic and ecological considerations [77]. Lausch et al. [9] provide an overview of a range of definitions of forest health. Forest health is defined as the absence or presence of symptoms caused by biotic and/or abiotic stressors at the individual tree scale. Hence, the severity of tree damage is measured by quantitatively collected crown features attributable to biotic and/or abiotic stress agents. Regardless of the causative factor, trees may show different internal and/or external symptoms. They are caused by stress-induced physiological and morphological responses of trees as a process of acclimation to environmental changes in an attempt to compensate for the loss of productivity [78]. These phenomena can be observed spectrally and structurally at different levels. In the early stages of stress, indistinct (previsual) changes in pigmentation composition of leaves (e.g., chlorophyll and carotenoid) are caused by a change of activity of biochemical processes. For example, less activity in photosynthesis may occur [79]. These subtle symptoms are typically not visible to the human eye [80]. In advanced stages, prolonged exposure to stress can cause irreversible damage, including discoloration, wilting, defoliation, and eventually lead to the tree’s death (see, e.g., [81][82][83]).
References
- Smith, D.; Smith, I.; Collett, N.; Elms, S. Forest health surveillance in Victoria. Aust. For. 2008, 71, 188–195.
- Gauthier, S.; Bernier, P.; Kuuluvainen, T.; Shvidenko, A.Z.; Schepaschenko, D.G. Boreal forest health and global change. Science 2015, 349, 819–822.
- Lausch, A.; Borg, E.; Bumberger, J.; Dietrich, P.; Heurich, M.; Huth, A.; Jung, A.; Klenke, R.; Knapp, S.; Mollenhauer, H.; et al. Understanding Forest Health with Remote Sensing, Part III: Requirements for a Scalable Multi-Source Forest Health Monitoring Network Based on Data Science Approaches. Remote Sens. 2018, 10, 1120.
- Forest Condition Monitoring (Level-I-Network). Available online: https://www.thuenen.de/de/wo/arbeitsbereiche/bodenschutz-und-waldzustand/waldzustandserhebung/ (accessed on 24 December 2021).
- Potter, K.M.; Conkling, B.L. Forest Health Monitoring: National Status, Trends, and Analysis 2020; Technical Report SRS-261; U.S. Department of Agriculture, Forest Service, Southern Research Station: Asheville, NC, USA, 2021.
- Welcome to ICP Forests: A Programme Aiming at a Comprehensive Compilation of Information on the Condition of Forests in Europe and Beyond. Available online: http://icp-forests.net/ (accessed on 10 March 2022).
- Michel, A.; Kirchner, T.; Prescher, A.K.; Schwärzel, K. Forest Condition in Europe: The 2021 Assessment; Technical Report under the UNECE Convention on Long-Range Transboundary Air Pollution (Air Convention), ICP Forests; Thünen Institute: Eberswalde, Germany, 2021.
- Zimudzi, E.; Sanders, I.; Rollings, N.; Omlin, C.W. Remote sensing of mangroves using unmanned aerial vehicles: Current state and future directions. J. Spat. Sci. 2021, 66, 195–212.
- Lausch, A.; Erasmi, S.; King, D.; Magdon, P.; Heurich, M. Understanding Forest Health with Remote Sensing -Part I—A Review of Spectral Traits, Processes and Remote-Sensing Characteristics. Remote Sens. 2016, 8, 1029.
- Lausch, A.; Erasmi, S.; King, D.; Magdon, P.; Heurich, M. Understanding Forest Health with Remote Sensing-Part II—A Review of Approaches and Data Models. Remote Sens. 2017, 9, 129.
- Pause, M.; Schweitzer, C.; Rosenthal, M.; Keuck, V.; Bumberger, J.; Dietrich, P.; Heurich, M.; Jung, A.; Lausch, A. In Situ/Remote Sensing Integration to Assess Forest Health—A Review. Remote Sens. 2016, 8, 471.
- Wulder, M.A.; White, J.C.; Bentz, B.; Alvarez, M.F.; Coops, N.C. Estimating the probability of mountain pine beetle red-attack damage. Remote Sens. Environ. 2006, 101, 150–166.
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of Drone Altitude, Image Overlap, and Optical Sensor Resolution on Multi-View Reconstruction of Forest Images. Remote Sens. 2019, 11, 1252.
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicles Forest Remote Sensing—A Systematic Review. Part II: Research Applications. Forests 2021, 12, 397.
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97.
- From Unmanned to Uncrewed: Moving Away from Gender-Based Terminology. Available online: https://www.canada.ca/en/department-national-defence/maple-leaf/defence/2021/05/unmanned-to-uncrewed-moving-away-from-gender-based-terminology.html (accessed on 11 May 2022).
- Torres, P.; Rodes-Blanco, M.; Viana-Soto, A.; Nieto, H.; García, M. The Role of Remote Sensing for the Assessment and Monitoring of Forest Health: A Systematic Evidence Synthesis. Forests 2021, 12, 1134.
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046.
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168.
- Koontz, M.J.; Latimer, A.M.; Mortenson, L.A.; Fettig, C.J.; North, M.P. Cross-scale interaction of host tree size and climatic water deficit governs bark beetle-induced tree mortality. Nat. Commun. 2021, 12, 129.
- Gómez, C.; Alejandro, P.; Hermosilla, T.; Montes, F.; Pascual, C.; Ruiz, L.A.; Álvarez-Taboada, F.; Tanase, M.; Valbuena, R. Remote sensing for the Spanish forests in the 21st century: A review of advances, needs, and opportunities. For. Syst. 2019, 28, 1–33.
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447.
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641.
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correction Workflows. Remote Sens. 2018, 10, 1091.
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391.
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146.
- Cracknell, A.P. UAVs: Regulations and law enforcement. Int. J. Remote Sens. 2017, 38, 3054–3067.
- Tmušić, G.; Manfreda, S.; Aasen, H.; James, M.R.; Gonçalves, G.; Ben-Dor, E.; Brook, A.; Polinova, M.; Arranz, J.J.; Mészáros, J.; et al. Current Practices in UAS-based Environmental Monitoring. Remote Sens. 2020, 12, 1001.
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15.
- Hall, R.J.; Castilla, G.; White, J.C.; Cooke, B.J.; Skakun, R.S. Remote sensing of forest pest damage: A review and lessons learned from a Canadian perspective. Can. Entomol. 2016, 148, S296–S356.
- Han, X.; Thomasson, J.A.; Bagnall, G.C.; Pugh, N.A.; Horne, D.W.; Rooney, W.L.; Jung, J.; Chang, A.; Malambo, L.; Popescu, S.C.; et al. Measurement and Calibration of Plant-Height from Fixed-Wing UAV Images. Sensors 2018, 18, 4092.
- Saarinen, N.; Vastaranta, M.; Näsi, R.; Rosnell, T.; Hakala, T.; Honkavaara, E.; Wulder, M.; Luoma, V.; Tommaselli, A.; Imai, N.; et al. Assessing Biodiversity in Boreal Forests with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2018, 10, 338.
- Goodbody, T.R.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81.
- Gatziolis, D.; Lienard, J.F.; Vogs, A.; Strigul, N.S. 3D Tree Dimensionality Assessment Using Photogrammetry and Small Unmanned Aerial Vehicles. PLoS ONE 2015, 10, e0137765.
- Xiang, T.Z.; Xia, G.S.; Zhang, L. Mini-Unmanned Aerial Vehicle-Based Remote Sensing: Techniques, applications, and prospects. IEEE Geosci. Remote Sens. Mag. 2019, 7, 29–63.
- G. Poley, L.; J. McDermid, G. A Systematic Review of the Factors Influencing the Estimation of Vegetation Aboveground Biomass Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 1052.
- Hirschmüller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341.
- Dall’Asta, E.; Roncella, R. A comparison of semiglobal and local dense matching algorithms for surface reconstruction. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva del Garda, Italy, 23–25 June 2014; Volume 45.
- White, J.; Wulder, M.; Vastaranta, M.; Coops, N.; Pitt, D.; Woods, M. The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning. Forests 2013, 4, 518–536.
- Anderson, K.; Westoby, M.J.; James, M.R. Low-budget topographic surveying comes of age: Structure from motion photogrammetry in geography and the geosciences. Prog. Phys. Geogr. Earth Environ. 2019, 43, 163–173.
- Salamí, E.; Barrado, C.; Pastor, E. UAV flight experiments applied to the remote sensing of vegetated areas. Remote Sens. 2014, 6, 11051–11081.
- Xia, L.; Zhang, R.; Chen, L.; Li, L.; Yi, T.; Wen, Y.; Ding, C.; Xie, C. Evaluation of Deep Learning Segmentation Models for Detection of Pine Wilt Disease in Unmanned Aerial Vehicle Images. Remote Sens. 2021, 13, 3594.
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A light-weight multispectral sensor for micro UAV—Opportunities for very high resolution airborne remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1193–1200.
- Nebiker, S.; Lack, N.; Abaecherli, M.; Laederach, S. Light-weight multispectral UAV sensors and their capabilities for predicting grain yield and detecting plant diseases. In Proceedings of the 23rd Congress of the International-Society-for-Photogrammetry-and-Remote-Sensing (ISPRS), Prague, Czech Republic, 12–19 July 2016; Copernicus GmbH: Göttingen, Germany, 2016; Volume 41, pp. 963–970.
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110.
- Loncan, L.; Almeida, L.B.; Bioucas-Dias, J.M.; Briottet, X.; Chanussot, J.; Dobigeon, N.; Fabre, S.; Liao, W.; Licciardi, G.A.; Simoes, M.; et al. Hyperspectral Pansharpening: A Review. IEEE Geosci. Remote Sens. Mag. 2015, 3, 27–46.
- Meng, X.; Shen, H.; Li, H.; Zhang, L.; Fu, R. Review of the pansharpening methods for remote sensing images based on the idea of meta-analysis: Practical discussion and challenges. Inf. Fusion 2019, 46, 102–113.
- Aiazzi, B.; Baronti, S.; Selva, M. Improving Component Substitution Pansharpening Through Multivariate Regression of MS + Pan Data. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3230–3239.
- Thomas, C.; Ranchin, T.; Wald, L.; Chanussot, J. Synthesis of Multispectral Images to High Spatial Resolution: A Critical Review of Fusion Methods Based on Remote Sensing Physics. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1301–1312.
- Amro, I.; Mateos, J.; Vega, M.; Molina, R.; Katsaggelos, A.K. A survey of classical methods and new trends in pansharpening of multispectral images. EURASIP J. Adv. Signal Process. 2011, 2011, 79.
- Yokoya, N.; Grohnfeldt, C.; Chanussot, J. Hyperspectral and Multispectral Data Fusion: A comparative review of the recent literature. IEEE Geosci. Remote Sens. Mag. 2017, 5, 29–56.
- Calleja, J.F.; Requejo Pagés, O.; Díaz-Álvarez, N.; Peón, J.; Gutiérrez, N.; Martín-Hernández, E.; Cebada Relea, A.; Rubio Melendi, D.; Fernández Álvarez, P. Detection of buried archaeological remains with the combined use of satellite multispectral data and UAV data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 555–573.
- Brook, A.; de Micco, V.; Battipaglia, G.; Erbaggio, A.; Ludeno, G.; Catapano, I.; Bonfante, A. A smart multiple spatial and temporal resolution system to support precision agriculture from satellite images: Proof of concept on Aglianico vineyard. Remote Sens. Environ. 2020, 240, 111679.
- RedEdge-P: The New Standard for Data Quality and Repeatability. Available online: https://micasense.com/rededge-p/ (accessed on 1 May 2022).
- Huo, L.; Zhang, N.; Zhang, X.; Wu, Y. Tree defoliation classification based on point distribution features derived from single-scan terrestrial laser scanning data. Ecol. Indic. 2019, 103, 782–790.
- Shendryk, I.; Broich, M.; Tulbure, M.G.; McGrath, A.; Keith, D.; Alexandrov, S.V. Mapping individual tree health using full-waveform airborne laser scans and imaging spectroscopy: A case study for a floodplain eucalypt forest. Remote Sens. Environ. 2016, 187, 202–217.
- Solberg, S.; Næsset, E.; Hanssen, K.H.; Christiansen, E. Mapping defoliation during a severe insect attack on Scots pine using airborne laser scanning. Remote Sens. Environ. 2006, 102, 364–376.
- Bohn Reckziegel, R.; Sheppard, J.P.; Kahle, H.P.; Larysch, E.; Spiecker, H.; Seifert, T.; Morhart, C. Virtual pruning of 3D trees as a tool for managing shading effects in agroforestry systems. Agrofor. Syst. 2022, 96, 89–104.
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543.
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236.
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231.
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215.
- Hyyppä, E.; Hyyppä, J.; Hakala, T.; Kukko, A.; Wulder, M.A.; White, J.C.; Pyörälä, J.; Yu, X.; Wang, Y.; Virtanen, J.P.; et al. Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J. Photogramm. Remote Sens. 2020, 164, 41–60.
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Næsset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497.
- Bagaram, M.B.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. UAV remote sensing for biodiversity monitoring: Are forest canopy gaps good covariates? Remote Sens. 2018, 10, 1397.
- Sothe, C.; Dalponte, M.; de Almeida, C.M.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree Species Classification in a Highly Diverse Subtropical Forest Integrating UAV-Based Photogrammetric Point Cloud and Hyperspectral Data. Remote Sens. 2019, 11, 1338.
- Yaney-Keller, A.; Santidrián Tomillo, P.; Marshall, J.M.; Paladino, F.V. Using Unmanned Aerial Systems (UAS) to assay mangrove estuaries on the Pacific coast of Costa Rica. PLoS ONE 2019, 14, e0217310.
- Witczuk, J.; Pagacz, S.; Zmarz, A.; Cypel, M. Exploring the feasibility of unmanned aerial vehicles and thermal imaging for ungulate surveys in forests - preliminary results. Int. J. Remote Sens. 2018, 39, 5504–5521.
- Hendel, I.G.; Ross, G.M. Efficacy of Remote Sensing in Early Forest Fire Detection: A Thermal Sensor Comparison. Can. J. Remote Sens. 2020, 46, 414–428.
- Yuan, C.; Zhang, Y.; Liu, Z. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. For. Res. 2015, 45, 783–792.
- FAO and UNEP. The State of the World’s Forests 2020: Forests, Biodiversity and People; FAO and UNEP: Rome, Italy, 2020; p. 214.
- Miura, S.; Amacher, M.; Hofer, T.; San-Miguel-Ayanz, J.; Ernawati; Thackway, R. Protective functions and ecosystem services of global forests in the past quarter-century. For. Ecol. Manag. 2015, 352, 35–46.
- Mensah, S.; Veldtman, R.; Assogbadjo, A.E.; Ham, C.; Glèlè Kakaï, R.; Seifert, T. Ecosystem service importance and use vary with socio-environmental factors: A study from household-surveys in local communities of South Africa. Ecosyst. Serv. 2017, 23, 1–8.
- Niinemets, Ü. Responses of forest trees to single and multiple environmental stresses from seedlings to mature plants: Past stress history, stress interactions, tolerance and acclimation. For. Ecol. Manag. 2010, 260, 1623–1639.
- Seidl, R.; Thom, D.; Kautz, M.; Martin-Benito, D.; Peltoniemi, M.; Vacchiano, G.; Wild, J.; Ascoli, D.; Petr, M.; Honkaniemi, J. Forest disturbances under climate change. Nat. Clim. Chang. 2017, 7, 395–402.
- Trumbore, S.; Brando, P.; Hartmann, H. Forest health and global change. Science 2015, 349, 814–818.
- Stone, C.; Mohammed, C. Application of Remote Sensing Technologies for Assessing Planted Forests Damaged by Insect Pests and Fungal Pathogens: A Review. Curr. For. Rep. 2017, 3, 75–92.
- Lambers, H.; Oliveira, R.S. Introduction: History, Assumptions, and Approaches. In Plant Physiological Ecology, 3rd ed.; Springer International Publishing AG: Cham, Switzerland, 2019; pp. 1–10.
- Eitel, J.U.; Vierling, L.A.; Litvak, M.E.; Long, D.S.; Schulthess, U.; Ager, A.A.; Krofcheck, D.J.; Stoscheck, L. Broadband, red-edge information from satellites improves early stress detection in a New Mexico conifer woodland. Remote Sens. Environ. 2011, 115, 3640–3646.
- Hernández-Clemente, R.; Navarro-Cerrillo, R.M.; Suárez, L.; Morales, F.; Zarco-Tejada, P.J. Assessing structural effects on PRI for stress detection in conifer forests. Remote Sens. Environ. 2011, 115, 2360–2375.
- Grulke, N.E.; Heath, R.L. Ozone effects on plants in natural ecosystems. Plant Biol. 2020, 22 (Suppl. 1), 12–37.
- Schuldt, B.; Buras, A.; Arend, M.; Vitasse, Y.; Beierkuhnlein, C.; Damm, A.; Gharun, M.; Grams, T.E.; Hauck, M.; Hajek, P.; et al. A first assessment of the impact of the extreme 2018 summer drought on Central European forests. Basic Appl. Ecol. 2020, 45, 86–103.
- Obladen, N.; Dechering, P.; Skiadaresis, G.; Tegel, W.; Keßler, J.; Höllerl, S.; Kaps, S.; Hertel, M.; Dulamsuren, C.; Seifert, T.; et al. Tree mortality of European beech and Norway spruce induced by 2018-2019 hot droughts in central Germany. Agric. For. Meteorol. 2021, 307, 108482.
More
Information
Subjects:
Remote Sensing
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.9K
Entry Collection:
Environmental Sciences
Revisions:
2 times
(View History)
Update Date:
27 Jul 2022
Table of Contents




Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No