 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Sofiane Dahmane | -- | 1637 | 2022-07-21 13:24:36 | | | |
| 2 | Vivi Li | Meta information modification | 1637 | 2022-07-22 04:10:04 | | |
Video Upload Options
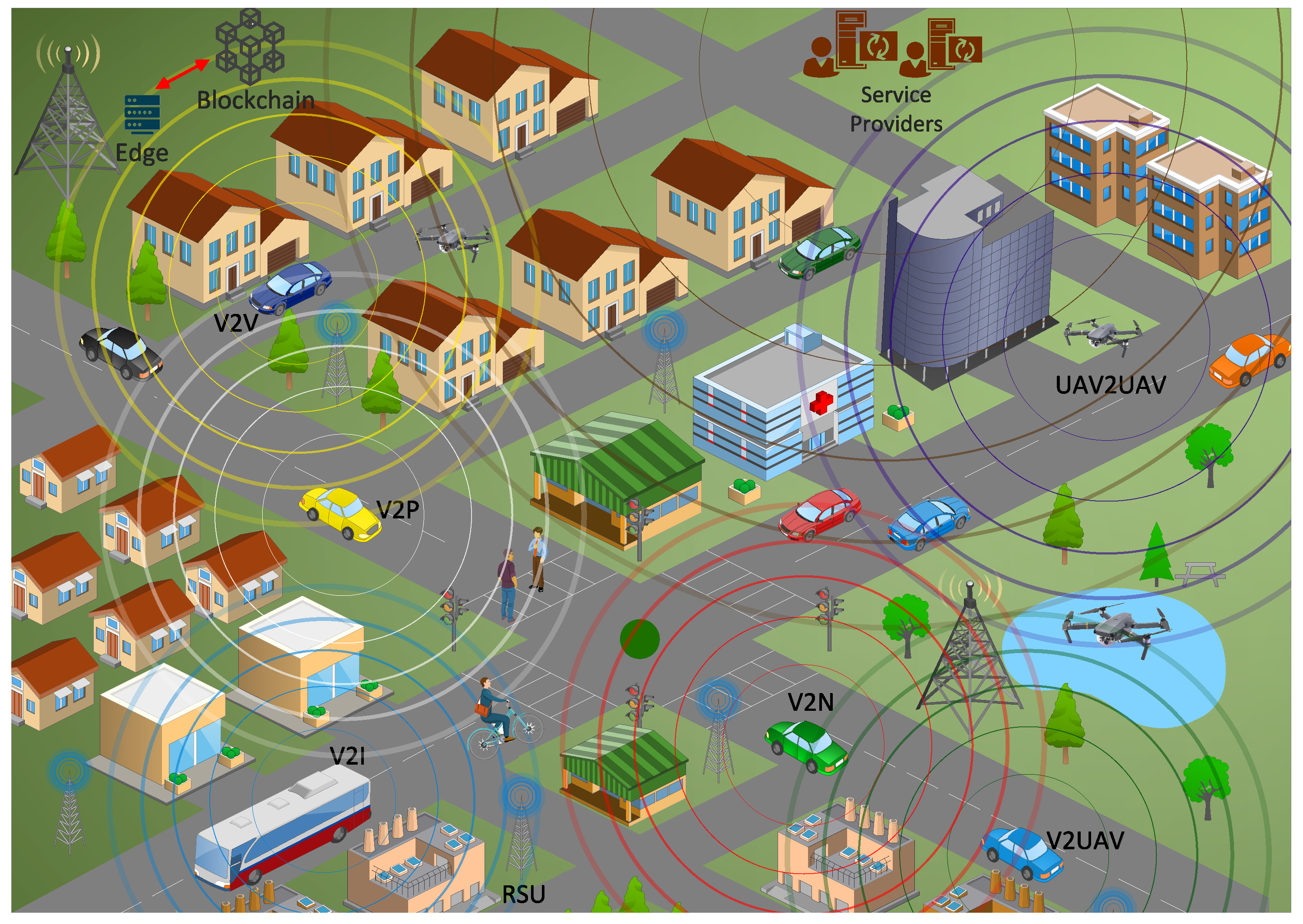
Unmanned aerial vehicles (UAVs) have gained increasing attention in boosting the performance of conventional networks due to their small size, high efficiency, low cost, and autonomously nature. The amalgamation of UAVs with both distributed/collaborative Deep Learning (DL) algorithms, such as Federated Learning (FL), and Blockchain technology have ushered in a new paradigm of Secure Multi-Access Edge Computing (S-MEC). Indeed, FL enables UAV devices to leverage their sensed data to build local DL models. The latter are then sent to a central node, e.g., S-MEC node, for aggregation, in order to generate a global DL model. Therefore, FL enables UAV devices to collaborate during several FL rounds in generating a learning model, while avoiding to share their local data, and thus ensuring UAVs’ privacy.
1. Introduction
2. Client/Participant Selection in FL Process
3. Resource-Constrained Client/Participant Selection in FL Process
References
- Billah, M.; Mehedi, S.; Anwar, A.; Rahman, Z.; Islam, R. A Systematic Literature Review on Blockchain Enabled Federated Learning Framework for Internet of Vehicles. arXiv 2022, arXiv:2203.05192.
- Syed, F.; Gupta, S.K.; Hamood Alsamhi, S.; Rashid, M.; Liu, X. A survey on recent optimal techniques for securing unmanned aerial vehicles applications. Trans. Emerg. Telecommun. Technol. 2021, 32, e4133.
- Zhang, X.; Chen, X. UAV task allocation based on clone selection algorithm. Wirel. Commun. Mob. Comput. 2021, 2021, 5518927.
- Kayalvizhi, M.; Ramamoorthy, S. Review of Security Gaps in Optimal Path Selection in Unmanned Aerial Vehicles Communication. In Sustainable Advanced Computing; Springer: Singapore, 2022; pp. 439–451.
- Nguyen, D.C.; Hosseinalipour, S.; Love, D.J.; Pathirana, P.N.; Brinton, C.G. Latency Optimization for Blockchain-Empowered Federated Learning in Multi-Server Edge Computing. arXiv 2022, arXiv:2203.09670.
- Liu, X.; Deng, Y.; Mahmoodi, T. A Novel Hybrid Split and Federated Learning Architecture in Wireless UAV Networks. In Proceedings of the IEEE ICC, Seoul, Korea, 16–20 May 2022; IEEE: Manhattan, NY, USA, 2022.
- Brik, B.; Messaadia, M.; Sahnoun, M.; Bettayeb, B.; Benatia, M.A. Fog-Supported Low-Latency Monitoring of System Disruptions in Industry 4.0: A Federated Learning Approach. ACM Trans. Cyber-Phys. Syst. 2022, 6, 14.
- Yang, H.; Zhao, J.; Xiong, Z.; Lam, K.Y.; Sun, S.; Xiao, L. Privacy-preserving federated learning for UAV-enabled networks: Learning-based joint scheduling and resource management. IEEE J. Sel. Areas Commun. 2021, 39, 3144–3159.
- Brik, B.; Ksentini, A.; Bouaziz, M. Federated learning for UAVs-enabled wireless networks: Use cases, challenges, and open problems. IEEE Access 2020, 8, 53841–53849.
- Brik, B.; Ksentini, A. On Predicting Service-oriented Network Slices Performances in 5G: A Federated Learning Approach. In Proceedings of the 2020 IEEE 45th Conference on Local Computer Networks (LCN), Sydney, Australia, 16–19 November 2020; pp. 164–171.
- Saraswat, D.; Verma, A.; Bhattacharya, P.; Tanwar, S.; Sharma, G.; Bokoro, P.N.; Sharma, R. Blockchain-Based Federated Learning in UAVs Beyond 5G Networks: A Solution Taxonomy and Future Directions. IEEE Access 2022, 10, 33154–33182.
- Abou El Houda, Z.; Brik, B.; Ksentini, A.; Khoukhi, L.; Guizani, M. When Federated Learning Meets Game Theory: A Cooperative Framework to secure IIoT Applications on Edge Computing. IEEE Trans. Ind. Inform. 2022, 1.
- Otoum, S.; Al Ridhawi, I.; Mouftah, H. A Federated Learning and Blockchain-enabled Sustainable Energy-Trade at the Edge: A Framework for Industry 4.0. IEEE Internet Things J. 2022.
- Lai, F.; Zhu, X.; Madhyastha, H.V.; Chowdhury, M. Oort: Efficient federated learning via guided participant selection. In Proceedings of the 15th USENIX Symposium on Operating Systems Design and Implementation (OSDI 21), Santa Clara, CA, USA, 14–16 July 2021; pp. 19–35.
- Chai, Z.; Ali, A.; Zawad, S.; Truex, S.; Anwar, A.; Baracaldo, N.; Zhou, Y.; Ludwig, H.; Yan, F.; Cheng, Y. Tifl: A tier-based federated learning system. In Proceedings of the 29th International Symposium on High-Performance Parallel and Distributed Computing, Stockholm, Sweden, 23–26 June 2020; pp. 125–136.
- Li, L.; Duan, M.; Liu, D.; Zhang, Y.; Ren, A.; Chen, X.; Tan, Y.; Wang, C. FedSAE: A novel self-adaptive federated learning framework in heterogeneous systems. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–10.
- Wang, H.; Kaplan, Z.; Niu, D.; Li, B. Optimizing federated learning on non-iid data with reinforcement learning. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 1698–1707.
- Yang, M.; Wang, X.; Zhu, H.; Wang, H.; Qian, H. Federated learning with class imbalance reduction. In Proceedings of the 2021 29th European Signal Processing Conference (EUSIPCO), Dublin, Ireland, 23–27 August 2021; pp. 2174–2178.
- Nishio, T.; Yonetani, R. Client Selection for Federated Learning with Heterogeneous Resources in Mobile Edge. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–7.
- Dai, Z.; Zhang, Y.; Zhang, W.; Luo, X.; He, Z. A Multi-Agent Collaborative Environment Learning Method for UAV Deployment and Resource Allocation. IEEE Trans. Signal Inf. Process. Over Netw. 2022, 8, 120–130.
- Kim, S.; Ibrahim, A.S. Byzantine-Fault-Tolerant Consensus via Reinforcement Learning for Permissioned Blockchain-Empowered V2X Network. IEEE Trans. Intell. Veh. 2022.
- Ghdiri, O.; Jaafar, W.; Alfattani, S.; Abderrazak, J.B.; Yanikomeroglu, H. Offline and Online UAV-Enabled Data Collection in Time-Constrained IoT Networks. IEEE Trans. Green Commun. Netw. 2021, 5, 1918–1933.

