 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | T GIRIJA PRASANNA | -- | 3101 | 2022-06-24 07:35:26 | | | |
| 2 | Jason Zhu | -59 word(s) | 3042 | 2022-06-24 09:39:13 | | |
Video Upload Options
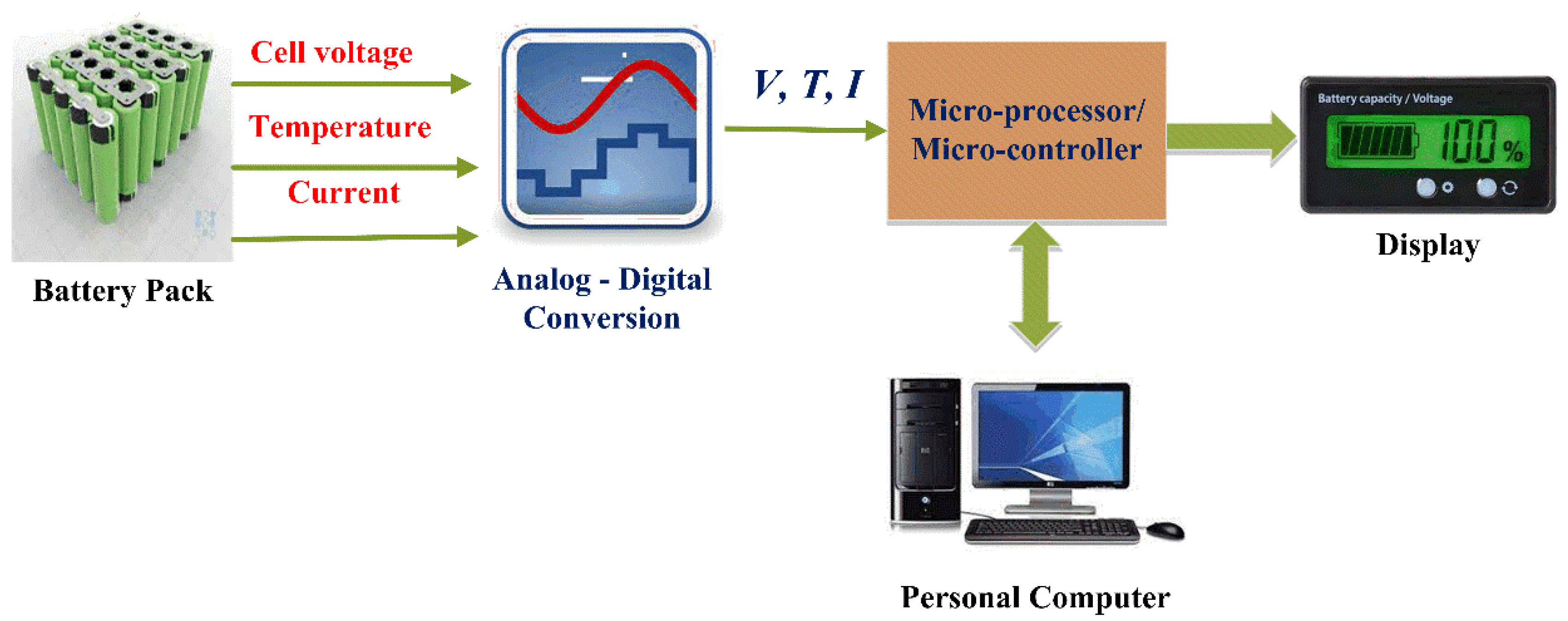
Electric vehicles (EVs) have acquired significant popularity due to their performance and efficiency. EVs are already largely acknowledged as the most promising solutions to global environmental challenges and CO2 emissions. Li-ion batteries are most frequently employed in EVs due to their various benefits. An effective Battery Management System (BMS) is essential to improve the battery's- performance, including charging-discharging control, precise monitoring, heat management, battery safety, and protection, and also an accurate estimation of the State of Charge (SOC). The SOC is required to provide the driver with a precise indication of the remaining range.
1. Introduction
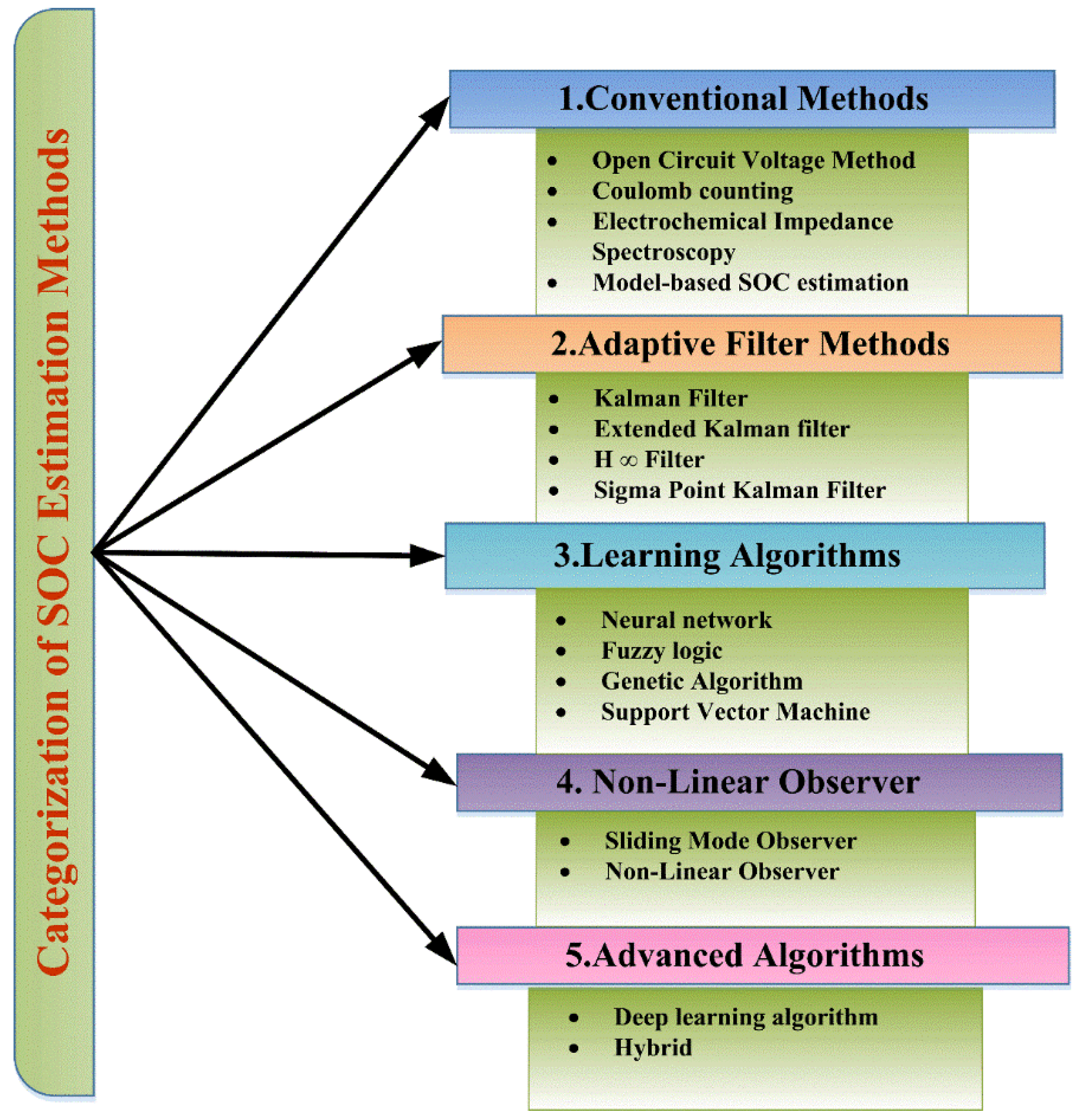
2. Conventional Methods
2.1. Open-Circuit Voltage Method
2.2. Coulomb Counting (CC) Method
The CC technique is the easiest one to estimate the SOC of the battery, and it can be implemented very quickly with low power calculation. The charging/discharging of the battery depends upon the integration of the current concerning time. It is expressed in Equation.
where η indicates the Coulombic efficiency, i indicates the current of the battery, and cm
2.3. Electrochemical Impedance Spectroscopy (EIS)
2.4. Model-Based SOC Estimation

3. Adaptive Filter (AF) Algorithm
3.1. Kalman Filter (KF) Algorithm


3.2. Extended Kalman Filter (EKF)
3.3. H ∞ Filter
3.4. Sigma Point Kalman Filter
4. Learning Algorithms
4.1. Neural Network (NN) Algorithm
4.2. Fuzzy Logic Algorithm
4.3. Genetic Algorithm (GA)
4.4. Support Vector Machine Algorithm
5. Nonlinear Observer (NLO)
5.1. Sliding Mode Observer (SMO)
5.2. Nonlinear Observer (NLO)
6. Advanced SOC Estimation Techniques
6.1. Deep Learning Algorithm (DLA)
6.2. Hybrid Methodologies
References
- Yang, B.; Wang, J.; Cao, P.; Zhu, T.; Shu, H.; Chen, J.; Zhang, J.; Zhu, J. Classification, summarization and perspectives on state-of-charge estimation of lithium-ion batteries used in electric vehicles: A critical comprehensive survey. J. Energy Storage 2021, 39, 102572.
- Snihir, I.; Rey, W.; Verbitskiy, E.; Belfadhel-Ayeb, A.; Notten, P.H. Battery open-circuit voltage estimation by a method of statistical analysis. J. Power Sources 2006, 159, 1484–1487.
- Tingting, D.; Jun, L.; Fuquan, Z.; Yi, Y.; Qiqian, J. Analysis on the influence of measurement error on state of charge estimtion of LiFePO4 power Battery. In Proceedings of the 2011 International Conference on Materials for Renewable Energy & Environment 2011, Shanghai, China, 20–22 May 2011.
- Lee, S.J.; Kim, J.H.; Lee, J.M.; Cho, B.H. The state and parameter estimation of an Li-ion battery using a new OCV-SOCconcept. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007.
- Roscher, M.A.; Sauer, D.U. Dynamic electric behavior and open-circuit-voltage modeling of LiFePO4-based lithium ion secondary batteries. J. Power Sources 2011, 196, 331–336.
- Zhang, Y.; Song, W.; Lin, S.; Feng, Z. A novel model of the initial state of charge estimation for LiFePO4 batteries. J. Power Sources 2014, 248, 1028–1033.
- Leng, F.; Tan, C.M.; Yazami, R.; Le, M.D. A practical framework of electrical based online state-of-charge estimation of lithium ion batteries. J. Power Sources 2014, 255, 423–430.
- Messing, M.; Shoa, T.; Ahmed, R.; Habibi, S. Battery SoC estimation from EIS using neural nets. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 24–26 June 2020.
- Li, M. Li-ion dynamics and state of charge estimation. Renew. Energy 2017, 100, 44–52.
- Ran, L.; Junfeng, W.; Haiying, W.; Gechen, L. Prediction of state of charge of Lithium-ion rechargeable battery with electrochemical impedance spectroscopy theory. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications 2010, Taichung, Taiwan, 15–17 June 2010.
- Meng, J.; Stroe, D.-I.; Ricco, M.; Luo, G.; Teodorescu, R. A Simplified Model-Based State-of-Charge Estimation Approach for Lithium-Ion Battery With Dynamic Linear Model. IEEE Trans. Ind. Electron. 2019, 66, 7717–7727.
- Cho, S.; Jeong, H.; Han, C.; Jin, S.; Lim, J.H.; Oh, J. State-of-charge estimation for lithium-ion batteries under various opeating conditions using an equivalent circuit model. Comput. Chem. Eng. 2012, 41, 1–9.
- Rahman, A.; Anwar, S.; Izadian, A. Electrochemical model parameter identification of a lithium-ion battery using particle swarm optimization method. J. Power Sources 2016, 307, 86–97.
- Stetzel, K.D.; Aldrich, L.L.; Trimboli, M.; Plett, G.L. Electrochemical state and internal variables estimation using a reduced-order physics-based model of a lithium-ion cell and an extended Kalman filter. J. Power Sources 2015, 278, 490–505.
- Di Domenico, D.; Fiengo, G.; Stefanopoulou, A. Lithium-ion battery state of charge estimation with a Kalman Filter based on a electrochemical model. In Proceedings of the 2008 IEEE International Conference on Control Applications, San Antonio, TX, USA, 3–5 September 2008.
- Bruen, T.; Marco, J. Modelling and experimental evaluation of parallel connected lithium ion cells for an electric vehicle battery system. J. Power Sources 2016, 310, 91–101.
- Lai, X.; Gao, W.; Zheng, Y.; Ouyang, M.; Li, J.; Han, X.; Zhou, L. A comparative study of global optimization methods for parameter identification of different equivalent circuit models for Li-ion batteries. Electrochim. Acta 2019, 295, 1057–1066.
- Xu, L.; Wang, J.; Chen, Q. Kalman filtering state of charge estimation for battery management system based on a stochastic fuzzy neural network battery model. Energy Convers. Manag. 2012, 53, 33–39.
- Ting, T.O.; Man, K.L.; Lim, E.; Leach, M. Tuning of Kalman Filter Parameters via Genetic Algorithm for State-of-Charge Estimation in Battery Management System. Sci. World J. 2014, 2014, 176052.
- Urbain, M.; Rael, S.; Davat, B.; Desprez, P. State Estimation of a Lithium-Ion Battery Through Kalman Filter. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference 2007, Orlando, FL, USA, 17–21 June 2007.
- Yatsui, M.W.; Bai, H. Kalman filter-based state-of-charge estimation for lithium-ion batteries in hybrid electric vehicles using pulse charging. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011.
- Jokic, I.; Zecevic, Z.; Krstajic, B. State-of-charge estimation of lithium-ion batteries using extended Kalman filter and unscented Kalman filter. In Proceedings of the 2018 23rd International Scientific-Professional Conference on Information Technology (IT), Žabljak, Montenegro, 19–24 February 2018.
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292.
- Ben Sassi, H.; Errahimi, F.; Es-Sbai, N. State of charge estimation by multi-innovation unscented Kalman filter for vehicular applications. J. Energy Storage 2020, 32, 101978.
- Chen, Z.; Fu, Y.; Mi, C. State of Charge Estimation of Lithium-Ion Batteries in Electric Drive Vehicles Using Extended Kalman Filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030.
- Fang, Y.; Zhang, Q.; Zhang, H.; Xu, W.; Wang, L.; Shen, X.; Yun, F.; Cui, Y.; Wang, L.; Zhang, X. State-of-charge estimation technique for lithium-ion batteries by means of second-order extended Kalman filter and equivalent circuit model: Great temperature robustness state-of-charge estimation. IET Power Electron. 2021, 14, 1515–1528.
- Liu, X.; Li, K.; Wu, J.; He, Y.; Liu, X. An extended Kalman filter based data-driven method for state of charge estimation of Li-ion batteries. J. Energy Storage 2021, 40, 102655.
- Nian, P.; Shuzhi, Z.; Xiongwen, Z. Co-estimation for capacity and state of charge for lithium-ion batteries using improved adaptive extended Kalman filter. J. Energy Storage 2021, 40, 102559.
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Evaluation on State of Charge Estimation of Batteries With Adaptive Extended Kalman Filter by Experiment Approach. IEEE Trans. Veh. Technol. 2013, 62, 108–117.
- Wang, S.; Fernandez, C.; Shang, L.; Li, Z.; Li, J. Online state of charge estimation for the aerial lithium-ion battery packs based on the improved extended Kalman filter method. J. Energy Storage 2017, 9, 69–83.
- Espedal, I.B.; Jinasena, A.; Burheim, O.S.; Lamb, J.J. Current Trends for State-of-Charge (SoC) Estimation in Lithium-Ion Battery Electric Vehicles. Energies 2021, 14, 3284.
- Wassiliadis, N.; Adermann, J.; Frericks, A.; Pak, M.; Reiter, C.; Lohmann, B.; Lienkamp, M. Revisiting the dual extended Kalman filter for battery state-of-charge and state-of-health estimation: A use-case life cycle analysis. J. Energy Storage 2018, 19, 73–87.
- Sangwan, V.; Kumar, R.; Rathore, A.K. State-of-Charge estimation of Li-ion battery at different temperatures using particle filter. J. Eng. 2019, 2019, 5320–5324.
- Gao, M.; Liu, Y.; He, Z. Battery state of charge online estimation based on particle filter. In Proceedings of the 2011 4th International Congress on Image and Signal Processing, Shanghai, China, 15–17 October 2011.
- Schwunk, S.; Armbruster, N.; Straub, S.; Kehl, J.; Vetter, M. Particle filter for state of charge and state of health estimation for lithium–iron phosphate batteries. J. Power Sources 2013, 239, 705–710.
- He, Y.; Liu, X.; Zhang, C.; Chen, Z. A new model for State-of-Charge (SOC) estimation for high-power Li-ion batteries. Appl. Energy 2013, 101, 808–814.
- Zhang, Y.; Zhang, C.; Zhang, X. State-of-charge estimation of the lithium-ion battery system with time-varying parameter for hybrid electric vehicles. IET Control Theory Appl. 2014, 8, 160–167.
- Charkhgard, M.; Zarif, M.H. Design of adaptive H ∞ filter for implementing on state-of-charge estimation based on battery state-of-charge-varying modelling. IET Power Electron. 2015, 8, 1825–1833.
- Zhang, J. Battery state-of-charge estimation based on sigma point Kalman filter. In Proceedings of the 2011 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce (AIMSEC), Zhengzhou, China, 8–10 August 2011.
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2: Simultaneous state and parameter estimation. J. Power Sources 2006, 161, 1369–1384.
- He, Z.; Liu, Y.; Gao, M.; Wang, C. A joint model and SOC estimation method for lithium battery based on the sigma point KF. In Proceedings of the 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 17–20 June 2012.
- He, Z.; Gao, M.; Xu, J.; Liu, Y. Battery Model Parameters Estimation with the Sigma Point Kalman Filter. In Proceedings of the 2009 International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–8 November 2009.
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for Li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. Int. J. Electr. Power Energy Syst. 2014, 62, 783–791.
- Chen, Z.; Qiu, S.; Masrur, M.; Murphey, Y.L. Battery state of charge estimation based on a combined model of Extended Kalman Filter and neural networks. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011.
- Rui-Hao, L.; Yu-Kun, S.; Xiao-Fu, J. Battery state of charge estimation for electric vehicle based on neural network. In Proceedings of the 2011 IEEE 3rd International Conference on Communication Software and Networks, Xi’an, China, 27–29 May 2011.
- Salkind, A.J.; Fennie, C.; Singh, P.; Atwater, T.; Reisner, D.E. Determination of state-of charge and state-of-health of batteries by fuzzy logic methodology. J. Power Sources 1999, 80, 293–300.
- Jamlouie, M.H.A. Accuracy improvement of SOC estimation in lithium-ion batteries by ANFIS vs. ANN modeling of nonlinear cell characteristics. J. Energy Storage 2021, 6, 95–104.
- Singh, P.; Vinjamuri, R.; Wang, X.; Reisner, D. Design and implementation of a fuzzy logic-based state-of-charge meter for Li-ion batteries used in portable defibrillators. J. Power Sources 2006, 162, 829–836.
- Malkhandi, S. Fuzzy logic-based learning system and estimation of state-of-charge of lead-acid battery. Eng. Appl. Artif. Intell. 2006, 19, 479–485.
- Li, I.-H.; Wang, W.-Y.; Su, S.-F.; Lee, Y.-S. A Merged Fuzzy Neural Network and Its Applications in Battery State-of-Charge Estimation. IEEE Trans. Energy Convers. 2007, 22, 697–708.
- Cai, C.H.; Du, D.; Liu, Z.Y. Battery state-of-charge (SOC) estimation using adaptive neuro-fuzzy inference system (ANFIS). In Proceedings of the 12th IEEE International Conference on Fuzzy Systems, St. Louis, MO, USA, 25–28 May 2003.
- Shen, W.; Chan, C.; Lo, E.; Chau, K.T. Adaptive neuro-fuzzy modeling of battery residual capacity for electric vehicles. IEEE Trans. Ind. Electron. 2002, 49, 677–684.
- Zheng, Y.; Lu, L.; Han, X.; Li, J.; Ouyang, M. LiFePO4 battery pack capacity estimation for electric vehicles based on charging cell voltage curve transformation. J. Power Sources 2013, 226, 33–41.
- Xu, J.; Cao, B.; Chen, Z.; Zou, Z. An online state of charge estimation method with reduced prior battery testing information. Int. J. Electr. Power Energy Syst. 2014, 63, 178–184.
- Antón, J.C.Á.; Nieto, P.J.G.; de Cos Juez, F.J.; Lasheras, F.S.; Vega, M.G.; Gutiérrez, M.N.R. Battery state-of-charge estimator using the SVM technique. Appl. Math. Model. 2013, 37, 6244–6253.
- Wu, X.; Mi, L.; Tan, W.; Qin, J.L.; Na Zhao, M. State of Charge (SOC) Estimation of Ni-MH Battery Based on Least Square Support Vector Machines. Adv. Mater. Res. 2011, 211–212, 1204–1209.
- Kim, I.-S. Nonlinear State of Charge Estimator for Hybrid Electric Vehicle Battery. IEEE Trans. Power Electron. 2008, 23, 2027–2034.
- Chen, X.; Shen, W.; Cao, Z.; Kapoor, A.; Hijazin, I. Adaptive gain sliding mode observer for state of charge estimation based on combined battery equivalent circuit model in electric vehicles. Aust. J. Electr. Electron. Eng. 2013, 9, 601–606.
- Boizot, N.; Busvelle, E.; Gauthier, J.-P. An adaptive high-gain observer for nonlinear systems. Automatica 2010, 46, 1483–1488.
- Xu, J.; Mi, C.; Cao, B.; Deng, J.; Chen, Z.; Li, S. The State of Charge Estimation of Lithium-Ion Batteries Based on a Proportional-Integral Observer. IEEE Trans. Veh. Technol. 2014, 63, 1614–1621.
- Xu, F.; Wang, Y.; Luo, X. Soft Sensor for Inputs and Parameters Using Nonlinear Singular State Observer in Chemical Processes. Chin. J. Chem. Eng. 2013, 21, 1038–1047.
- Kim, I.-S. The novel state of charge estimation method for lithium battery using sliding mode observer. J. Power Sources 2006, 163, 584–590.
- Xia, B.; Chen, C.; Tian, Y.; Sun, W.; Xu, Z.; Zheng, W. A novel method for state of charge estimation of lithium-ion batteries using a nonlinear observer. J. Power Sources 2014, 270, 359–366.
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Ahmed, R.; Emadi, A.; Kollmeyer, P. Long Short-Term Memory Networks for Accurate State-of-Charge Estimation of Li-ion Batteries. IEEE Trans. Ind. Electron. 2018, 65, 6730–6739.
- How, D.N.; Hannan, M.; Lipu, M.H.; Sahari, K.S.; Ker, P.J.; Muttaqi, K.M. State-of-charge estimation of li-ion battery in electric vehicles: A deep neural network approach. IEEE Trans. Ind. Appl. 2020, 56, 5565–5574.
- Yang, F.; Li, W.; Li, C.; Miao, Q. State-of-charge estimation of lithium-ion batteries based on gated recurrent neural network. Energy 2019, 175, 66–75.
- Song, X.; Yang, F.; Wang, D.; Tsui, K.-L. Combined CNN-LSTM Network for State-of-Charge Estimation of Lithium-Ion Batteries. IEEE Access 2019, 7, 88894–88902.
- Li, Y.; Wang, L.; Liao, C.; Wang, L.; Xu, D.; Yong, L.; Lifang, W.; Chenglin, L.; Liye, W.; Dongping, X. State-of-Charge Estimation of Lithium-Ion Battery Using Multi-State Estimate Technic for Electric Vehicle Applications. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013.
- Alfi, A.; Charkhgard, M.; Zarif, M.H. Hybrid state of charge estimation for lithium-ion batteries: Design and implementation. IET Power Electron. 2014, 7, 2758–2764.
- Xu, J.; Gao, M.; He, Z.; Han, Q.; Wang, X. State of Charge Estimation Online Based on EKF-Ah Method for Lithium-Ion Power Battery. In Proceedings of the 2009 2nd International Congress on Image and Signal Processing, Tianjin, China, 17–19 October 2009.
- Liu, Z.; Wang, Y.; Du, J.; Chen, C. RBF network-aided adaptive unscented kalman filter for lithium-ion battery SOC estimation in electric vehicles. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012.
- Unterrieder, C.; Priewasser, R.; Marsili, S.; Huemer, M. Battery state estimation using mixed Kalman/hinfinity, adaptive luenberger and sliding mode observer. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013.
- Su, J.; Schneider, S.; Yaz, E.; Josse, F. Online State of Charge Estimation of Lithium-ion Battery Cells: A Multiple Model Adaptive Estimation Approach. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021.
- Afshar, S.; Morris, K.; Khajepour, A. State-of-Charge Estimation Using an EKF-Based Adaptive Observer. IEEE Trans. Control Syst. Technol. 2019, 27, 1907–1923.
- Shabarish, P.R.; Aditya, D.V.S.S.; Pavan, V.V.S.S.P.; Manitha, P.V. SOC estimation of battery in hybrid vehicle using adaptive neuro-fuzzy technique. In Proceedings of the 2020 International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 10–12 September 2020.
- Zhang, Z.; Xue, B.; Fan, J. Noise Adaptive Moving Horizon Estimation for State-of-Charge Estimation of Li-Ion Battery. IEEE Access 2021, 9, 5250–5259.
- Li, Y.; Guo, H.; Qi, F.; Guo, Z.; Li, M. Comparative Study of the Influence of Open Circuit Voltage Tests on State of Charge Online Estimation for Lithium-Ion Batteries. IEEE Access 2020, 8, 17535–17547.

