where i indicates the current of the battery and c
m indicates the total capacity.
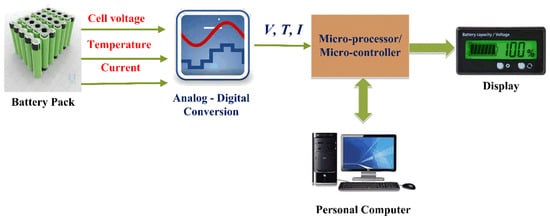
Figure 1. The general architecture of the SOC system.
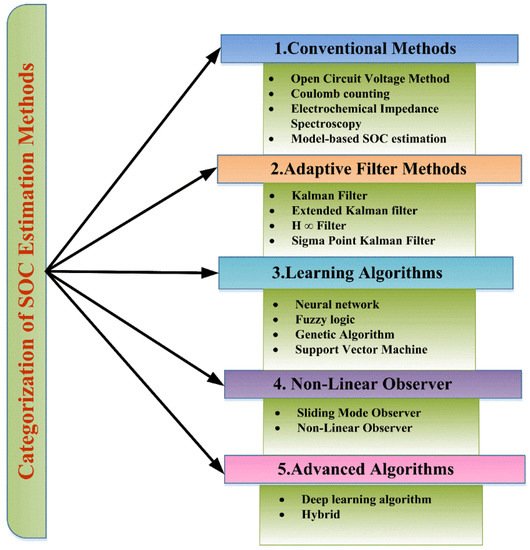
The battery’s total capacity decreases gradually due to its internal reaction and external load, leading to its nonlinear and non-stationary degradation characteristics. The categorization of SOC estimation methods is shown in
Figure 27. Different kinds of literature have been presented in various manners. Every technique has its unique advantages along with disadvantages.
In this review, SOC estimation methods were divided into five types: conventional, adaptive filter, learning algorithms, nonlinear observers, and others. Again, each process was classified into sub-methods
[1][54], described as follows.
Figure 2. Categorization of methods for estimation of SOC.
2. Conventional Methods
2.1. Open-Circuit Voltage Method
The open-circuit voltage method has high accuracy, is easy to implement, and is a straightforward method, but its main disadvantage is that it takes more time to reach an equilibrium position. Therefore, online estimation of SOC is not an appropriate method. Therefore, this method is applicable only for low power consumption applications. Moreover, some observations are required to measure the discharge and charge voltage. For example, at high OCV, the battery is charged, and it is discharged at small OCV because of the hysteresis characteristics in batteries
[2][3][4][5][55,56,57,58].
2.2. Coulomb Counting (CC) Method
The CC technique is the easiest one to estimate the SOC of the battery, and it can be implemented very quickly with low power calculation. The charging/discharging of the battery depends upon the integration of the current concerning time. It is expressed in Equation.
where η indicates the Coulombic efficiency, i indicates the current of the battery, and cm
indicates the total capacity.
However, due to its uncertain disturbances, noise, temperature, and current, its results could be inaccurate. Furthermore, more difficulties exist in determining the SOC initial values, which might cause a cumulative error
[6][59]. Additionally, to attain the maximum capacity, this method needs periodic capacity and complete cell discharge, which shortens the battery’s lifespan
[7][60].
2.3. Electrochemical Impedance Spectroscopy (EIS)
To implement the EIS, an appropriate electrochemical model is needed. Then, it evaluates the battery impedance by using capacitances and inductances over an extensive range of frequencies
[8][9][10][61,62,63] that are recognized in an equivalent circuit model that includes two capacitive arcs and an inductive arc operated at low and high frequencies. Under various SOC values, a nonlinear LSF technique is utilized for computing the model impedances. If the system is not functioning in stable conditions, the EIS outcomes are difficult to reproduce. It has the advantages of low cost, operating online, and attaining good accuracy. From the actual values, the effect of battery temperature and the aging difference could vary the estimated outcomes, resulting in a deficiency of precision.
2.4. Model-Based SOC Estimation
Since the open-circuit voltage scheme cannot execute online, it needs appropriate rest time to monitor the SOC, which means it cannot be applied while the vehicle moves. Therefore, for online SOC, battery model development is essential. The most used battery models include the electrochemical
[11][12][13][14][15][64,65,66,67,68] and equivalent circuit models
[16][17][69,70]. An electrochemical model is used to study the battery’s performance, which relates to the internal materials and considers the chemical thermodynamics and the electrodynamics effect. It can be expressed as:

where V denotes the terminal voltage, VOC means open-circuit voltage, VR indicates the potential difference across resistance, and VP represents the electric potential.
The RC networks have been used for the equivalent circuit model by considering dynamic and polarization characteristics. Using RLS (recursive least square) algorithm, the online OCV is executed and, for various RC networks, the outcome of the RLS algorithm is compared with experimental results. A model-based estimation is used online, and it has high precision. The drawback of this method for the specific battery is that a complete explanation of the electrochemical reactions is required, and it highly depends on the model’s accuracy.
3. Adaptive Filter (AF) Algorithm
3.1. Kalman Filter (KF) Algorithm
KF is a well-designed and intelligent tool commonly used in automobiles, navigator tracking, and aerospace applications. The striking feature of the Kalman filter is it has a self-correcting nature. A Kalman filter linear model contains a state equation, which predicts the current state, and a measurement equation, which updates the current state
[18][72], which are expressed as follows:


where A, B, C, and D represent the covariance matrices, x is the system state, f represents the process noise, u represents the control input, y represents the measurement input, and z represents measurement noise. Ting et al.
[19][73] developed an RC battery model, which is used for modeling a Kalman filter. To explain the dynamic battery characteristics, the RC model mathematical equations remain converted into a state–space model to describe the dynamic battery characteristics. The outcome indicates that the estimated RMS error of the SOC using the Kalman filter is minor compared to the measured error. The
resea
rcheuthors of
[20][74] also used the same method on the electrical equivalent model of a Li-ion battery with the help of the dSPACE real-time card and Matlab/Simulink software. The estimated SOC error was less than 5%. Yatsui
[21][75] combined the results of a Kalman filter with two methods, the OCV, and the CC methods, to ameliorate the non-ideal factors. After executing the Kalman filter, the SOC precision was improved, with an error of ±1.76%. However, the Kalman filter cannot be used directly. It needs a complex calculation and is profoundly dependable with great strength to various working conditions and battery aging. On the other hand, MI-UKF is impervious to unanticipated operational requirements and can improve UKF accuracy by more than 1%
[22][23][24][76,77,78].
3.2. Extended Kalman Filter (EKF)
EKF has been applied to work the framework in nonlinear applications. It uses first-order Taylor series expansion and partial derivatives to linearize the battery model. At every instant of time, the state-space model is linearized and equates the predicted value of the battery with the measured voltage to precisely approximate the constraints for the SOC. If the scheme is exceptionally nonlinear, a linearization blunder might still happen. In any case, the linearization blunder could happen when the framework is profoundly nonlinear since the first-order Taylor series experiences an absence of precision in an exceptionally nonlinear state. Finally, the improved dual AEKF algorithm was applied, and the SOH and SOC estimation errors were within 1%
[25][26][27][28][29][30][31][32][79,80,81,82,83,84,85,86].
3.3. H ∞ Filter
This is a very simple method in the designed model, and it does not have to know any details and measurement characteristics of noise. It considers only the time-varying parameters of the battery to carry out the system under the specific condition, which has robust strength. The precision of the model is deviated due to hysteresis, aging, and temperature effects
[33][34][35][36][87,88,89,90]. In
[37][91], this method was introduced to estimate battery SOC. The time-varying parameters are current, SOH, and temperature for second-order RC filter circuit design. An HPPC (hybrid pulse power characterization) experiment was performed to extract the voltage, resistance, and present characteristics. The projected model was tested using six Urban Dynamometer Driving Schedule tests and attained a good accuracy. In
[38][92], the adaptive H∞ filter was introduced to estimate SOC. In this method, a polynomial function is helpful to evaluate the system functions, and the performance is examined and then compared with the adaptive extended Kalman filter (AEKF). The AHF performed better in accuracy and computational cost than other methods.
3.4. Sigma Point Kalman Filter
This is another nonlinear technique for the calculation of states, and it achieves more precise outcomes than the extended Kalman filter. The sigma-point Kalman filter (SPKF) algorithm is subjected to a numerical approximation. The algorithm selects sets of sigma points that are identical to the mean and covariance values of the developed model. The SPKF has the advantage of having a similar calculation. Furthermore, without taking Jacobian matrices into account, the complexity of the EKF is reduced
[39][40][93,94]. The SPKF can demonstrate more accuracy while using less memory and performing fewer computational calculations. However, the estimated SOC was compared with the SPKF, Luenberger observer, and EKF algorithms, and the drawbacks are heavy and complicated calculations
[41][42][95,96].
4. Learning Algorithms
4.1. Neural Network (NN) Algorithm
An NN is a self-learning algorithm and also an intelligent tool. It uses trained data to estimate the state of the charge without knowing the initial data of the SOC. It consists of input, hidden, and output layers to form an NN structure
[43][97]. Building the NN structure takes discharge current, temperature, and voltage as inputs and the SOC as the output. The benefit of an NN is that it has a talent for being employed in nonlinear battery circumstances. The drawbacks are that training requires a large amount of data and a big memory to store the information
[44][45][98,99].
4.2. Fuzzy Logic Algorithm
FL is the most influential algorithm for extending nonlinear, complex prototypes by using the training data. The employment of fuzzy logic includes rule-based inputs and outputs, a reasoning membership function, and defuzzification. However, estimating a nonlinear model is a powerful function. It needs an intricate calculation, dispensation unit, and large memory storage. Salkind et al.
[46] applied FL for the estimation of SOC by using CC method data. This method uses three inputs at different frequencies, including impedances and SOC. It predicts the SOC with a max ±5% of error. The advanced ANFIS is most effective for estimating the SOC in Li-ion batteries; it was studied and applied in
[47][48][49][50][51][52][100,101,102,103,104,105].
4.3. Genetic Algorithm (GA)
A genetic algorithm is mainly used for finding the optimum parameter. The primary function of a GA is to alter the constraint’s trendy active method to improve the efficacy of the arrangement. It has been applied in mathematics, physics, and engineering for identifying nonlinear optimal parameters. Zheng et al.
[53][106] used a genetic algorithm to assess four LiFePO4 battery cells, which were allied on a sequence. In addition, the outcome of this method was under 1% of the estimated SOC error. Xu et al.
[54][107] applied a genetic algorithm for finding the parameters. By using various driving cycles, the method was validated; the outcome of this method had better accuracy, with below 1% error.
4.4. Support Vector Machine Algorithm
The SVM algorithm practices regression algorithm and works on kernel function, which is intended for converting the nonlinear type in an inferior measurement into a linear variety in an extreme measurement. In
[55][108], the SVM technique was used for SOC estimation. The independent variables current, temperature, and voltage were obtained to excerpt the model constraints even though the batteries were discharging/charging. This method was authenticated, and an approved extreme SOC precision of 0.97 estimated quantity was determined. The benefits of SVM are performing in high-dimension models and nonlinear forms. By using training data, the SOC is estimated quickly and accurately. The drawback of this method is that trial and process errors are needed and require a long time
[56][109].
5. Nonlinear Observer (NLO)
5.1. Sliding Mode Observer (SMO)
SMO is an improved training controller for ensuring robustness and constancy of the system alongside model uncertainties as well as ecological disturbances. SMO is established by using the state equation in the next stage, which is decayed to the observer questions. In
[57][110], a developed SMO was introduced to balance the nonlinear battery dynamic characteristics by using an RC circuit. This method can provide a controller for the conjunction period at the sophisticated discharge/charge value rate. The UDDS is situated to justify the method, and outcome details showed under 3% of the SOC error. In
[58][111], the adaptive gain sliding mode observer (AGSMO) algorithm estimated the battery SOC on a combined equivalent circuit model. To extract the constraints, a battery pulse was used, and, by using the circuit model as well as terminal voltage, the state equations were developed. Experiments were performed to assess the recommended archetype, and outcomes proved that the model has an advantage in regulating the toughness derived when affecting all sound-on wrinkles.
5.2. Nonlinear Observer (NLO)
Several observers have been applied, including both a linear observer
[59][60][61][112,113,114] as well as a nonlinear
[62][115] observer, to estimate the SOC. In
[63][116], the NLO-dependent SOC estimation was introduced via a first-order corresponding RC circuit. This model was performed by using a driving cycle as well as a discharge test, and the outcomes were improved compared to extended KF and SMO in standings of speed and precision as well as cost. They are still discovering an appropriate gain matrix to decrease the error.
6. Advanced SOC Estimation Techniques
6.1. Deep Learning Algorithm (DLA)
Deep learning (DL) algorithms have contributed to a better understanding of SOC estimation. Among the most notable are the long short-term memory (LSTM) network, deep neural networks (DNN), gated recurrent unit (GRU), and convolutional neural networks (CNN). The LSTM network
[64][117] provides a strong SOC estimation performance because of its strong self-learning ability. The SOC of a battery is estimated using an LSTM network based on measured voltage, current, and temperature. Furthermore, DNN
[65][118] exploits the battery’s dependent behaviors on ambient temperatures and encodes them into DNN weights, resulting in a competitive estimation performance over a wide range of temperatures. GRU
[66][119] is used to estimate the battery SOC at different temperatures and to evaluate the performance of two common lithium-ion batteries. Unlike a traditional feedforward neural network, the RNN employs hidden nodes to store information about previous inputs, allowing the SOC estimation to incorporate this information. LSTM and GRU are RNN variants that extend the original RNN’s ability for long-term dependency. Another successful architecture in deep learning research is CNN. While the LSTM defines long-term dependency and is capable of handling time series data, the CNN employs convolutional behavior in a certain way to extract interconnections among input data. To model the complex battery dynamics, a combined CNN–LSTM network was proposed
[67][120]. The CNN was specifically used to obtain advanced spatial features from the original data, while the LSTM was used to model relationships between the current SOC and past and present inputs. Both CNN and LSTM networks capture both spatial and temporal features of battery data.
6.2. Hybrid Methodologies
The mixing of two or more algorithms is known as a hybrid, which improves the accuracy and efficiency of the battery. It requires a large memory unit because of its complex mathematical computations. However, a hybrid methodology accomplishes consistent as well as operative outcomes and then, likewise, decreases the BMS price. In
[68][121], the multi-state and extended Kalman filter methods were proposed, using the equivalent circuit model. The prototype is situated to move for a discrete state space that can provide supplementary data as opposed to linearized data by utilizing a Jacobian matrix. The simulation outcomes provided better accuracy, with a 2.7% average error. In
[69][122], the CC, KF, and OCV methods were re
svie
archwed for SOC estimation. First, by using the OCV and CC methods, the SOC was estimated, which decreased the estimated error of CC. Then, the Kalman filter was utilized to enhance the precision value of the SOC.
In
[70][123], a hybrid methodology was introduced; it included the CC and EKF methods for a time-changing dynamic estimation. The first open-circuit voltage method was applied for the SOC. The EKF was applied for the corrected SOC values, and this process was continued until the battery was fully discharged. The accuracy of the model was under 6.5%.
In
[71][124], SOC was estimated based on AUKF utilizing RBF, and it was utilized to alter the particulars of the system. The AUKF stayed employed for evaluating the SOC. Then, united, both methods were equated by adaptive KF. The results of the AUKF were superior to the adaptive KF from the perspective of error. In
[72][125], the H ∞ filter and discrete-time KF were applied to the nonlinear model of the Li-ion battery. The outcomes of this method were compared with adaptive Luenberger as well as SMO-based estimation models, and the accuracy of this method was improved, with <1% of error. In
[73][126], the SOC of the lithium-ion cell was adaptively estimated using the multiple model adaptive estimation (MMAE) technique using a modified enhanced self-correcting (ESC) cell model. When compared to the EKF result, the SOC estimation converged more quickly. In
[74][127], this
stud
y designed an enhanced Kalman filter (KF)-based adaptive observer by approximating the electrochemical model. The estimator’s predictions were compared against the experimental data in simulations. The simulation outcomes were more precise and efficient than those of the KF. The accuracy of this method was improved, with <2% of error.
In
[75][128], EKF paired with an adaptive neuro-fuzzy inference system (ANFIS) reduced error and improved accuracy over EKF alone. The root mean square error (RMSE) compared the EKF with the EKF-assisted ANFIS. In this way, the hybrid technology improved precision and accuracy while reducing expenses. In
[76][129], for Li-ion batteries with uncertain noise circumstances, a new noise adaptive moving horizon estimating (NAMHE) approach was suggested. The simulation outcomes showed that the suggested technique reduced the SOC estimate error compared to the classic moving horizon estimating (MHE) method. The RMSE of the suggested technique and MHE were 0.7543% and 1.3026%, respectively. In
[77][130], different OCV test methodologies impacted the correlation of the OCV and SOC; an effective OCV–SOC relationship may increase SOC online convergence speed and accuracy. The AEKF SOC estimate technique was more accurate and reliable than EKF during driving cycles, with a 0.5481% mean error of the proposed system. Hybrid methods give accurate outcomes and are cost-effective.