Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Broz, J.; Tichý, T.; Angelakis, V.; Bělinová, Z. V2X Applications in Road Tunnels. Encyclopedia. Available online: https://encyclopedia.pub/entry/22994 (accessed on 28 July 2026).
Broz J, Tichý T, Angelakis V, Bělinová Z. V2X Applications in Road Tunnels. Encyclopedia. Available at: https://encyclopedia.pub/entry/22994. Accessed July 28, 2026.
Broz, Jiri, Tomáš Tichý, Vangelis Angelakis, Zuzana Bělinová. "V2X Applications in Road Tunnels" Encyclopedia, https://encyclopedia.pub/entry/22994 (accessed July 28, 2026).
Broz, J., Tichý, T., Angelakis, V., & Bělinová, Z. (2022, May 17). V2X Applications in Road Tunnels. In Encyclopedia. https://encyclopedia.pub/entry/22994
Broz, Jiri, et al. "V2X Applications in Road Tunnels." Encyclopedia. Web. 17 May, 2022.
Copy Citation
Tunneling and tunnel equipment should be one of the main disciplines in urban planning and engineering. It is important to provide a solution for all road users, including road users in tunnels, where, for example, navigation is crucial, and its functionality may have implications on traffic throughout the city. However, the most important to ensure are the safety applications, e.g., smooth passing of an emergency vehicle, dissemination of warning information, as well as about the failure in tunnels or tunnel closure. Vehicular communication (V2X—vehicle-to-everything) is one of them.
C2X
C-ITS
connectivity
dead reckoning
V2X
GNSS
tunnels
1. Introduction
Today, the importance of city management is focused on new technologies, sustainability, social aspects, and complex solutions. It is based on the realization of new cases, architecture improvements, IoT deployment, data connectivity, and integration of these particularities, with the main objective of ensuring acceleration, the knowledge-based approach, future strategies, and sustainable evolution of livable cities [1][2][3]. The importance of livability also lies in the movement, accessibility, social, and environmental aspects that fall within the scope of urban transportation [4]. The hidden but essential parts of the transport infrastructure are the tunnels that ensure smooth traffic and connections between the city districts. Tunnels seem to be the perfect way to achieve the criteria for a smart city mentioned above, but several drawbacks are associated with them, especially from a technological point of view. This hidden part of the infrastructure does not allow common positioning systems [5], their applications, and sometimes data connectivity, and thus the tunnels are smart and also ineffective for many applications at the same time.
Here, the meaning of infrastructure is related to the tunnel itself (construction), control systems, equipment, and devices implemented in the tunnel, as well as in the surroundings, such as traffic light controllers, variable message signs, informative panels, etc., which are implemented on the access ramps to the tunnel and the tunnel exits.
Tunnels are an essential part of urban engineering and smart city ecosystems. First, due to the impact on traffic in the city [6], and second, due to the wide range of installed equipment that provides the possibility of data acquisition, to regulate the maximum allowed speed or entrance into the tunnel, and thus indirectly the number of vehicles in the city districts [7]. The implementation of the tunnel complex in cities brings many benefits, but the financial aspect of investing in construction and then even more in operation and maintenance is not negligible [8][9][10].
One of the major problems concerning tunnels is the Global Navigation Satellite System (GNSS) availability [11]. Since the tunnel is “hidden”, many applications are limited due to positioning requirements. Some of them only notify the user that the GNSS signal is lost, while other ones are based on statistical methods, computation, usage of external devices for supplementary measurements, communication, etc. [12][13]. The problem of a lack of GNSS signal availability has been occurring in tunnels for many years. Whereas smart technologies, navigation systems, and other applications are growing in popularity together with the trends of smart, resilient, and sustainable cities, the problem with GNSS is also growing and its importance is increasing. For this reason, the problem becomes the issue of how to solve positioning (not only) in tunnels.
For the mentioned reasons, it is necessary to take into account these blind spots in smart mobility and transportation solutions. Tunneling and tunnel equipment should be one of the main disciplines in urban planning and engineering. It is important to provide a solution for all road users, including road users in tunnels, where, for example, navigation is crucial, and its functionality may have implications on traffic throughout the city. However, the most important to ensure are the safety applications, e.g., smooth passing of an emergency vehicle, dissemination of warning information, as well as about the failure in tunnels or tunnel closure. Vehicular communication (V2X—vehicle-to-everything) is one of them [14][15], but it does not work properly in locations where GNSS is not available, and thus the analysis of V2X communication in the tunnel is presented in the research with a focus on assisted positioning methods due to V2X communication requirements in position accuracy and its continuous updating during the data transmission.
Within the research, it was found that the positioning of vehicles in vehicular ad hoc networks (VANETs) is crucial, as well as for the purposes of communication between cars and infrastructure. In normal operation of C-ITS (Cooperative–Intelligent Transport Systems), GNSS-based localization is mainly used. However, in tunnels, the GNSS is limited or unavailable. The proposed research strategies are presented in several articles, for example, New Roadside Units (RSU) Positioning [16] by Malik, which presents a specific positioning approach that could be used for vehicular communication. However, there are no specifics mentioned for tunnels, and in addition, the RSU also requires GNSS as well as on-board units placed in the cars. Similar work [17] is presented by Fouda et al., where the tunnels are considered. The simulated numerical results show the possible improvements for V2X communication. In Wang’s article [18], the RFID-assisted approach is presented, and then the Matlab simulation is established. In Hashmi’s article [19], the fusion model of GPS (Global Positioning System) and non-GPS systems is presented with an emphasis on VANETs. However, the results only show the output of the simulation tool.
For this reason, the experimental analysis of V2X communication based on assisted localization methods was performed under real conditions and is presented in the research. The main goal of the experiment is to verify whether V2X communication could be possible under the conditions using assisted localization methods in the limited GNSS availability environment, for example, in the road tunnel, where V2X communication is very important, especially from a safety point of view. The unique experimental test was carried out in the Blanka tunnel complex in Prague, because the tunnel is long enough to completely lose the GNSS signal (more than 5 km, which is vertically and horizontally divided and contains several intersections directly in the tunnel) and the verification of the C-ITS communication could be applied there. Within the test, the validity of C-ITS messages was constantly verified using the unique V2X software stack adopted in the testing units, so the invalid messages are ignored according to the ETSI standards, e.g., because of the positioning accuracy, and thus the V2X messages are not displayed in the application.
The uniqueness of the whole experiment lies in the fact that the tunnel was closed, which also enabled the testing of standardized scenarios of V2X communication directly in the tunnel, for example, a stationary vehicle use case in the tunnel, which would not be possible during normal operation with real traffic. Experience and needs with tunnel technology in Prague were also taken into account in the most common use cases related to tunnel emergencies. The most common case of extraordinary events is the stationary vehicle (failure, accident, etc.) that evokes the closure of a tunnel or a lane in the tunnel. Another common phenomenon is the emergency vehicles of the police, fire brigade, ambulance, or the intervention of a service vehicle in the tunnel, which also leads to the closure, or restriction of traffic in the tunnel at least. Due to the length of the Blanka tunnel and the junctions inside, the case of a stationary vehicle is the appropriate one for using the precise location, which fails via GNSS-based positioning, that is commonly used in the field of C-ITS and other smart applications. Therefore, the unique C-ITS testing was performed in the tunnel, where positioning was ensured by assisted localization approaches based on Dead Reckoning. The test results may benefit the subsequent operation of C-ITS in places where GNSS availability is limited. Therefore, the pilot test and its methodology were designed with a focus on the verification of whether the C-ITS is applicable and usable in the tunnel, and if so, further testing could be performed in a real traffic scenario with normal traffic flow.
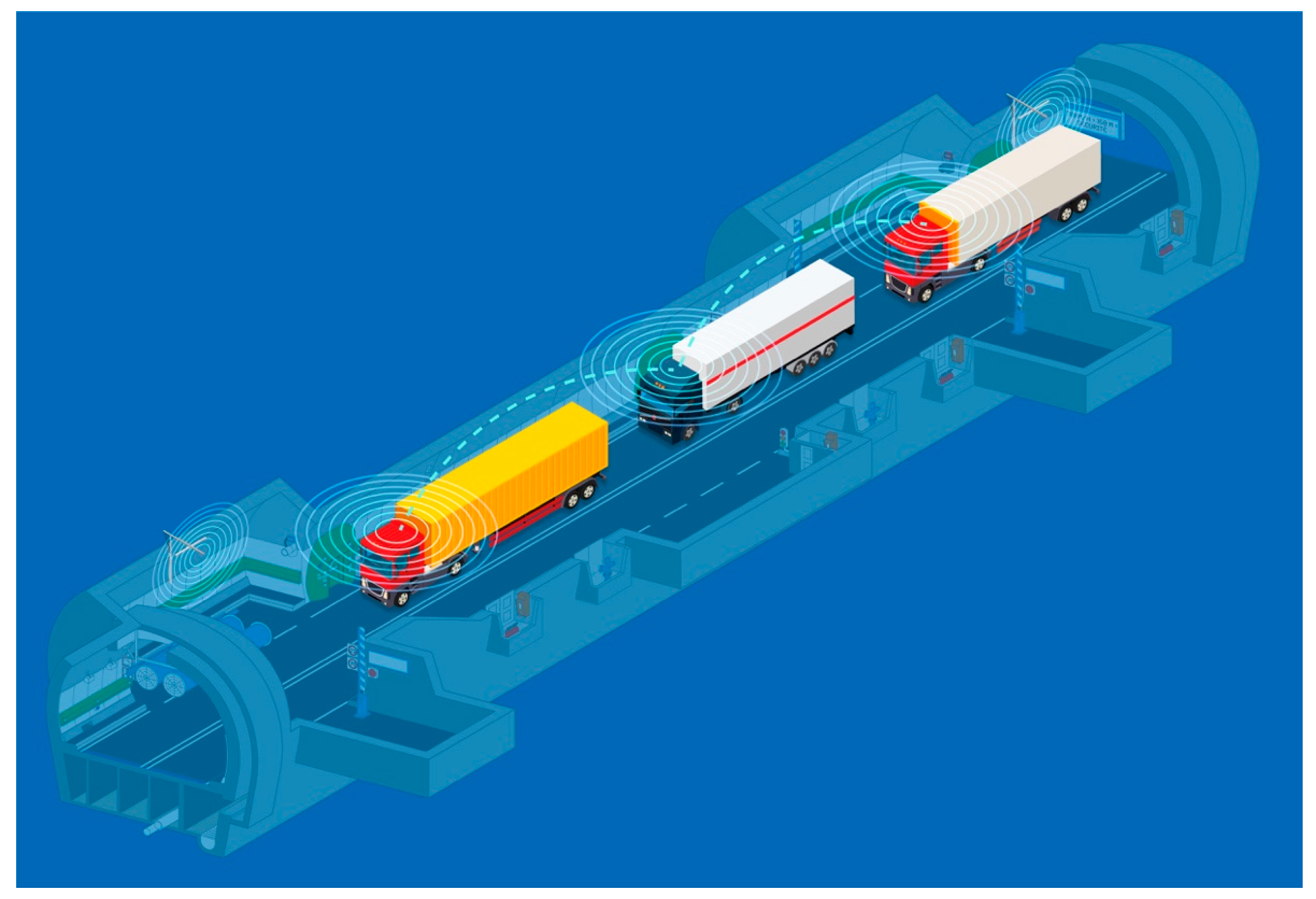 Figure 2. V2X Platooning [33].
Figure 2. V2X Platooning [33].
2. Positioning Approaches
Over the years, several approaches have been developed and applied with the main goal of ensuring additional data for the estimation of an accurate position based on video processing [20], sensor data acquisition [21], 3D accelerometers [22], gyroscope and odometry [23][24], beaconing [25], and other communication methods, such as wi-fi signal strength and fingerprinting [26], etc.
Moreover, various methods, such as Kalman filtering [27], Dead Reckoning [28], Map matching [29], and others, have been devised. These methods enable computation and filtering of input data and provide position refinement. Each of them has a specific value and benefit for certain purposes and usages, and each method calculates the position with an error.
The results of the experimental measurements are mentioned in [30], where the evaluation of GPS, Kalman filtering, and Dead Reckoning is performed and compared to the ground truth reference.
Each of the methods, including GNSS, respectively GPS, show an error. This implies that their combination could be a way to obtain a better accuracy estimation, especially when using Map matching, which is based on the map layout and reference positions in the map. These methods are relevant and are used in mobility solutions and applications, where the position of the vehicle could be calculated and pinned on the map [27][28][29][30]. This can also work in the tunnel, where the path is clearly defined.
Lastly, in the following figure (Figure 1), a schematic layout of the Dead Reckoning method and its functioning is presented. This functional schema was selected because it directly shows the use case for positioning in the tunnel and also because the Dead Reckoning approach was used within the experimental analysis presented here.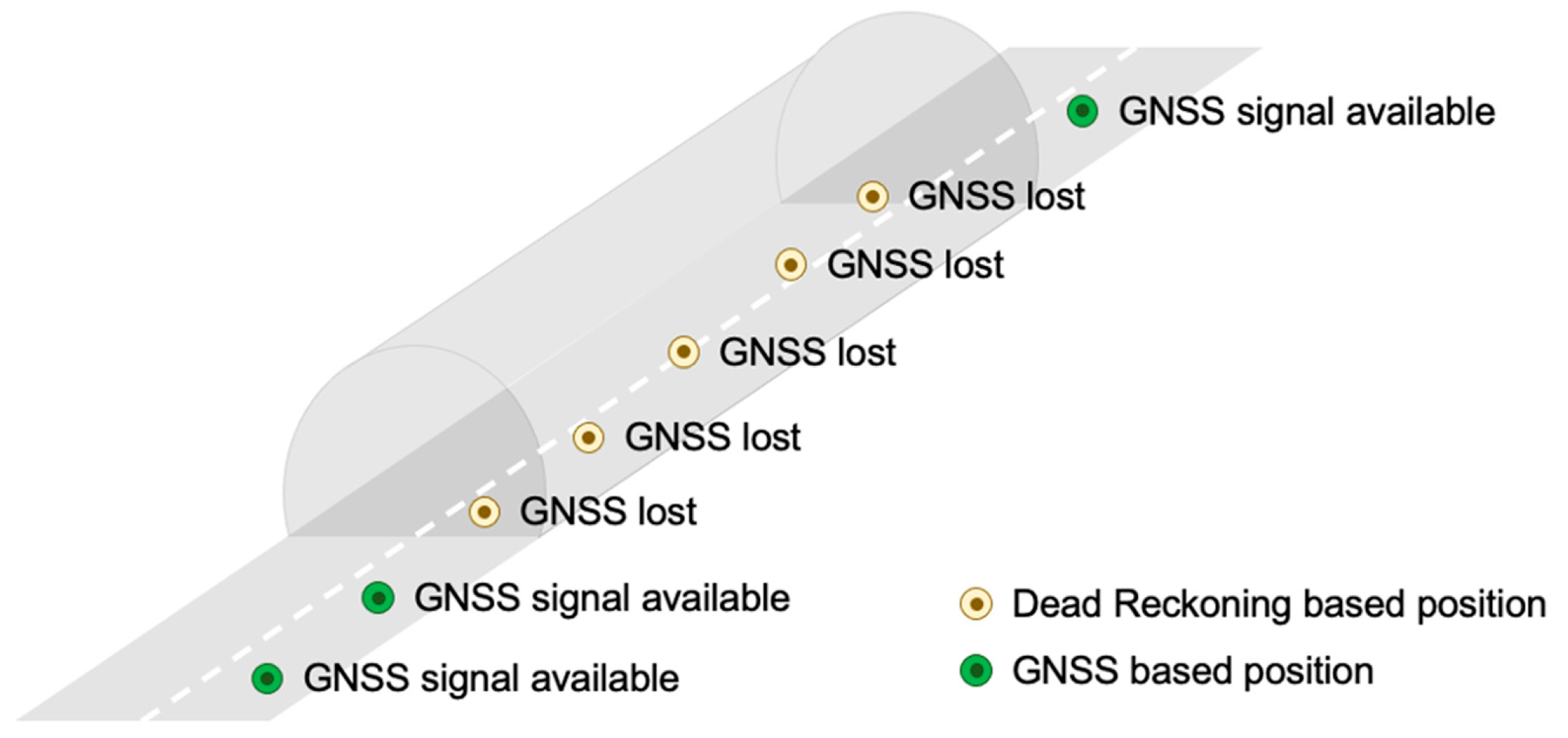
Figure 1. Utilization of Dead Reckoning.
3. V2X Requirements
Determining the position of the vehicle, mobile phone, advanced units, and technologies is crucial, especially in traffic and smart mobility solutions. In the field of C-ITS and VANETs, where vehicles should communicate with each other, position accuracy is essential. It is necessary to know where the vehicle is located and to whom it will send information. In the basic principles that are stated, recommended, and standardized for the European region by ETSI (European Telecommunications Standards Institute), for vehicular communication, the accuracy of the position can vary, but in some new cases, such as Platooning (see Figure 2), the information about the time and position is required at intervals of at least 20 times per second [31]. This is practically impossible to achieve on the basis of the received GNSS signal in the tunnel, where no satellites are visible [32].
Figure 2. V2X Platooning [33].The facts, prerequisites, experiences, and suggestions mentioned above led to the idea to test V2X communication in the tunnel and its surroundings. This was primarily to enhance knowledge about the usage of V2X applications with limited GNSS signal availability, such as tunnels, by practical experiment and measurement, to test further operating characteristics in the tunnel environment in parallel, but most of all, to obtain an answer on how the tunnel is prepared for the upcoming challenges of smart cities.
References
- D’Aniello, G.; Gaeta, M.; Orciuoli, F.; Sansonetti, G.; Sorgente, F. Knowledge-Based Smart City Service System. Electronics 2020, 9, 965.
- Negre, E.; Rosenthal-Sabroux, C.; Gascó, M. A Knowledge-Based Conceptual Vision of the Smart City. In Proceedings of the 48th Hawaii International Conference on System Sciences, Kauai, HI, USA, 5–8 January 2015; pp. 2317–2325.
- Silva, B.N.; Khan, M.; Seo, J.; Muhammad, D.; Yoon, Y.; Han, J.; Han, K. Exploiting big data analytics for urban planning and smart city performance improvement. In Proceedings of the 2018 12th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, QLD, Australia, 17–19 December 2018.
- Sofeska, E. Understanding the livability in a city through smart solutions and urban planning toward developing sustainable livable future of the city of Skopje. Procedia Environ. Sci. 2017, 37, 442–453.
- Mautz, R. The challenges of indoor environments and specification on some alternative positioning systems. In Proceedings of the 2009 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 29–36.
- Canto-Perello, J.; Curiel-Esparza, J. An analysis of utility tunnel viability in urban areas. Civ. Eng. Environ. Syst. 2006, 23, 11–19.
- Přibyl, O.; Přibyl, P.; Svítek, M. Interdisciplinary Urban Tunnel Control within Smart Cities. Appl. Sci. 2021, 11, 10950.
- Huang, L.; Bohne, R.A.; Bruland, A. Life cycle assessment of Norwegian road tunnel. Int. J. Life Cycle Assess 2015, 20, 174–184.
- Tichý, T.; Brož, J.; Bělinová, Z.; Pirník, R. Analysis of Predictive Maintenance for Tunnel Systems. Sustainability 2021, 13, 3977.
- Tichý, T.; Brož, J.; Bělinová, Z.; Kouba, P. Predictive diagnostics usage for telematic systems maintenance. In Proceedings of the 2020 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25 June 2020; pp. 1–6.
- Alam, N.; Kealy, A.; Dempster, A.G. Cooperative Inertial Navigation for GNSS-Challenged Vehicular Environments. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1370–1379.
- Sun, Z.; Tang, K.; Wang, X.; Wu, M.; Guo, Y. High-Speed Train Tunnel Navigation Method Based on Integrated MIMU/ODO/MC Navigation. Appl. Sci. 2021, 11, 3680.
- Werner, M. Indoor Location-Based Services: Prerequisites and Foundations; Springer: Berlin/Heidelberg, Germany, 2014.
- Jeong, S.; Baek, Y.; Son, S.H. A Hybrid V2X System for Safety-Critical Applications in VANET. In Proceedings of the 2016 IEEE 4th International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA), Nagoya, Japan, 6–7 October 2016; pp. 13–18.
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334.
- Malik, R.Q.; Zaidan, A.A.; Zaidan, B.B.; Ramli, K.N.; Albahri, O.S.; Kareem, Z.H.; Ameen, H.A.; Garfan, S.S.; Mohammed, A.; Zaidan, R.A.; et al. Novel roadside unit positioning framework in the context of the vehicle-to-infrastructure communication system based on AHP—Entropy for weighting and borda—VIKOR for uniform ranking. Int. J. Inf. Technol. Decis. Mak. 2021.
- Fouda, A.; Keating, R.; Ghosh, A. Dynamic Selective Positioning for High-Precision Accuracy in 5G NR V2X Networks. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–6.
- Wang, Z. Research on Key Technologies of Traffic Guidance in Smart City under the Environment of Internet of Vehicles. In Proceedings of the 2019 International Conference on Electronic Engineering and Informatics (EEI), Nanjing, China, 8–10 November 2019; pp. 94–100.
- Hashmi, M.T.; Adnan, A.; Hadi, F.; Zubair, M. Localized data fusion model for VANETs using GPS and non-GPS system. In Proceedings of the 2017 International Conference on Communication Technologies (ComTech), Rawalpindi, Pakistan, 19–21 April 2017; pp. 180–185.
- Schmitt, T.; Hanek, R.; Beetz, M.; Buck, S.; Radig, B. Cooperative probabilistic state estimation for vision-based autonomous mobile robots. IEEE Trans. Robot. Autom. 2002, 18, 670–684.
- Pastor, C.; Ruiz-Gonzalez, R.; Gomez-Gil, J. A data fusion system of GNSS data and on-vehicle sensors data for improving car positioning precision in urban environments. Expert Syst. Appl. 2017, 80, 28–38.
- Zheng, L.; Zhou, W.; Tang, W.; Zheng, X.; Peng, A.; Zheng, H. A 3D indoor positioning system based on low-cost MEMS sensors. Simul. Model. Pract. Theory 2016, 65, 45–56.
- Zhang, Q.; Guan, L.; Xu, D. Odometer Velocity and Acceleration Estimation Based on Tracking Differentiator Filter for 3D-Reduced Inertial Sensor System. Sensors 2019, 19, 4501.
- Nemec, D.; Hrubos, M.; Janota, A.; Pirnik, R.; Gregor, M. Estimation of the Speed From the Odometer Readings Using Optimized Curve-Fitting Filter. IEEE Sens. J. 2021, 21, 15687–15695.
- Subedi, S.; Kwon, G.-R.; Shin, S.; Hwang, S.-S.; Pyun, J.Y. Beacon based indoor positioning system using weighted centroid localization approach. In Proceedings of the 2016 Eighth International Conference on Ubiquitous and Future Networks (ICUFN), Vienna, Austria, 5–8 July 2016; pp. 1016–1019.
- Bisio, I.; Cerruti, M.; Lavagetto, F.; Marchese, M.; Pastorino, M.; Randazzo, A.; Sciarrone, A. A Trainingless WiFi Fingerprint Positioning Approach Over Mobile Devices. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 832–835.
- Balchen, J.G.; Jenssen, N.A.; Mathisen, E.; Sælid, S. A Dynamic Positioning System Based on Kalman Filtering and Optimal Control; Norwegian Society of Automatic Control, Modelling, Identification and Control: Prague, Czech Republic; pp. 135–163.
- Steinhoff, U.; Schiele, B. Dead reckoning from the pocket—An experimental study. In Proceedings of the 2010 IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010; pp. 162–170.
- Quddus, M.; Ochieng, W.; Noland, R. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328.
- Strange, A.; Ralston, J. Development of a real-time georeferenced subsurface radar system for mining applications. In Proceedings of the 2011 6th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Aachen, Germany, 22–24 June 2011.
- ETSI: Intelligent Transport Systems (ITS); Facilities Layer Function; Part 2: Position and Time Management (PoTi); Release 2 ETSI EN 302 890-2 V2.1.1 (2020-10). Available online: https://www.etsi.org/deliver/etsi_en/302800_302899/30289002/02.01.01_60/en_30289002v020101p.pdf (accessed on 2 March 2022).
- Chapman, M.; Min, C.; Zhang, D. Continuous mapping of tunnel walls in a gnss-denied environment. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B3, 481–485.
- ATMB. The Mont Blanc Autoroute and Tunnel. Available online: https://www.atmb.com/sites/default/files/edito/platooning_tunnel_mont_blanc_atmb.jpg (accessed on 28 June 2021).
More
Information
Subjects:
Transportation Science & Technology
Contributors
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.6K
Revisions:
3 times
(View History)
Update Date:
20 May 2022
Table of Contents



Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No