1. Vehicular Networking: Definition and Deployment
VANET is a subtype of Mobile Ad-hoc Network (MANET), where mobile nodes are smart vehicles able to create a spontaneous (ad hoc) network in order to transmit data packets between them
[1]. Such vehicles are comprised of On Board Units (OBU) for computing and transmitting messages, GPS (Global Positioning System) for location detection, EDR (Event Data Recorder), and sensors (radar and ladar)
[2]. This equipment is used to sense traffic congestion and avoid any serious traffic accident; in addition, they relay this information through the various communication modes available in the scope of a vehicular network environment, as shown in
Figure 1. A VANET is also formed by a collaboration between vehicles and fixed infrastructures called roadside units (RSUs)
[3], which help with data transmission. RSU is a fixed device along roads that is equipped with at least a network device for short-range wireless communications based on IEEE 802.11p
[4], with 75 MHz of a Dedicated Short Range Communication (DSRC) spectrum at 5.9 GHz
[5]. Within their coverage area, an RSU plays an important role for collecting and analyzing traffic data generated by smart vehicles. Additionally, RSUs can serve as a gateway to other communication networks, such as the Internet
[6].
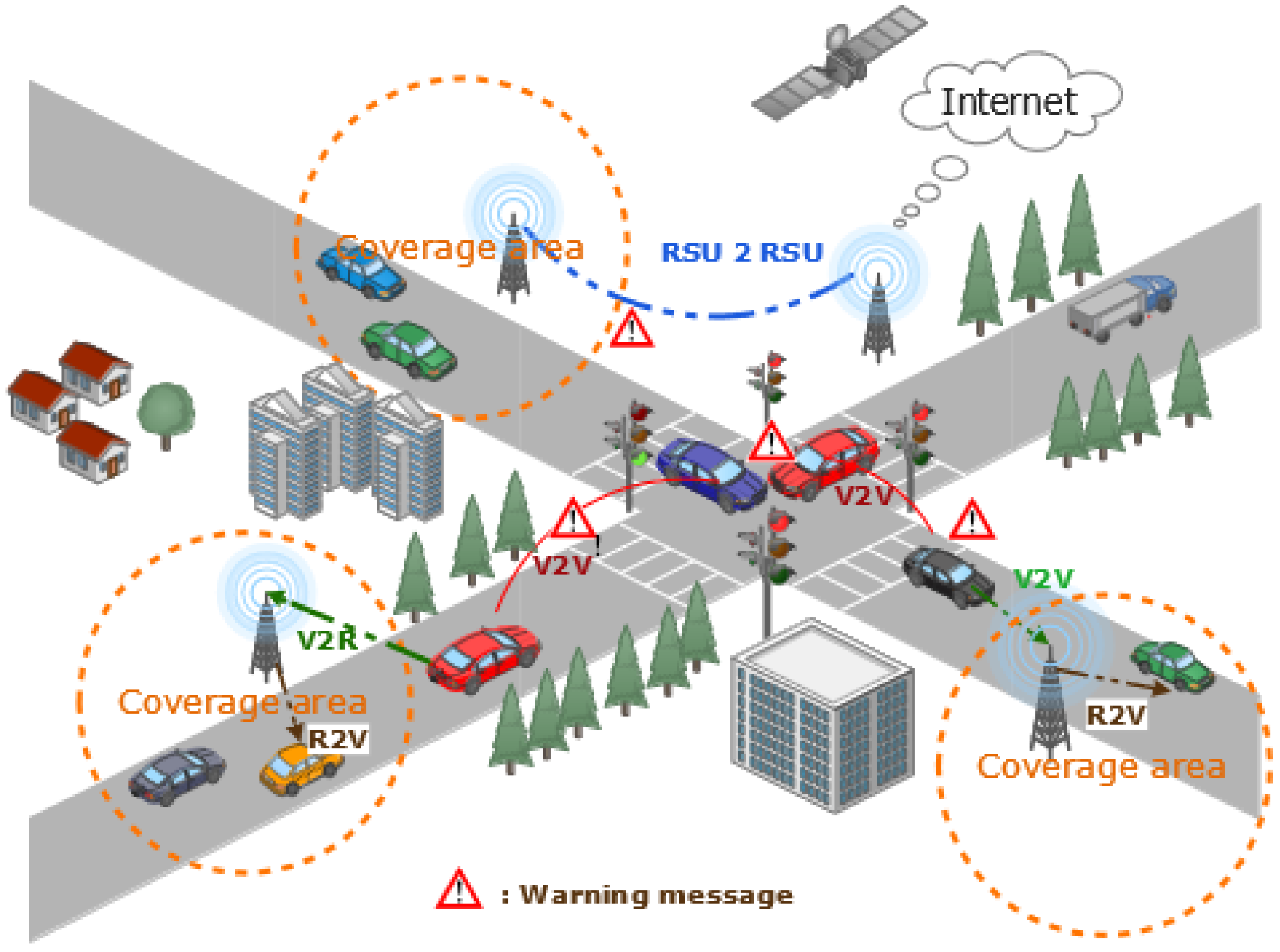
Figure 1. Communication modes in VANETs.
In VANETs, there are several communication mechanisms available, including the vehicle to-vehicle (V2V) mode, which is a pure ad-hoc communication without fixed infrastructure, vehicle-to-roadside units (V2R), or roadside units-to-vehicle (R2V) communications, which allows a vehicle to communicate with road side units primarily for collecting information and analyzing traffic data, and even a hybrid communication mode
[2][7]. The latter is a combination between V2V and V2R communications, whereby a vehicle can directly communicate with the road infrastructure; in addition, a vehicle can communicate via multi-hopping with other vehicles when direct transmission to an RSU is not possible with a single hop
[8]. It was noted that an RSU can directly transmit data to another RSU in roadside unit-to-roadside unit (RSU 2 RSU) communication to facilitate computation, network load-balancing, and information sharing
[9].
Figure 1 shows a VANET architecture with different transmission modes.
VANET are essentially characterized by a high mobility of vehicles, leading to a highly dynamic network topology because cars driving at different speeds can result in frequent fragmentation in their network connectivity
[10].
Many VANET-based applications have been developed, which may be divided into three categories: safety, efficiency and comfort applications
[11]. The goal of safety applications is to reduce the frequency of traffic accidents, whereas efficiency applications provide information and recommendations for traffic optimisation. Finally, comfort applications are designed to meet digital needs of drivers and passengers, such as accessing the Internet, locating the nearest restaurant, hotel, or gas station.
2. Taxonomy of RSU Deployment
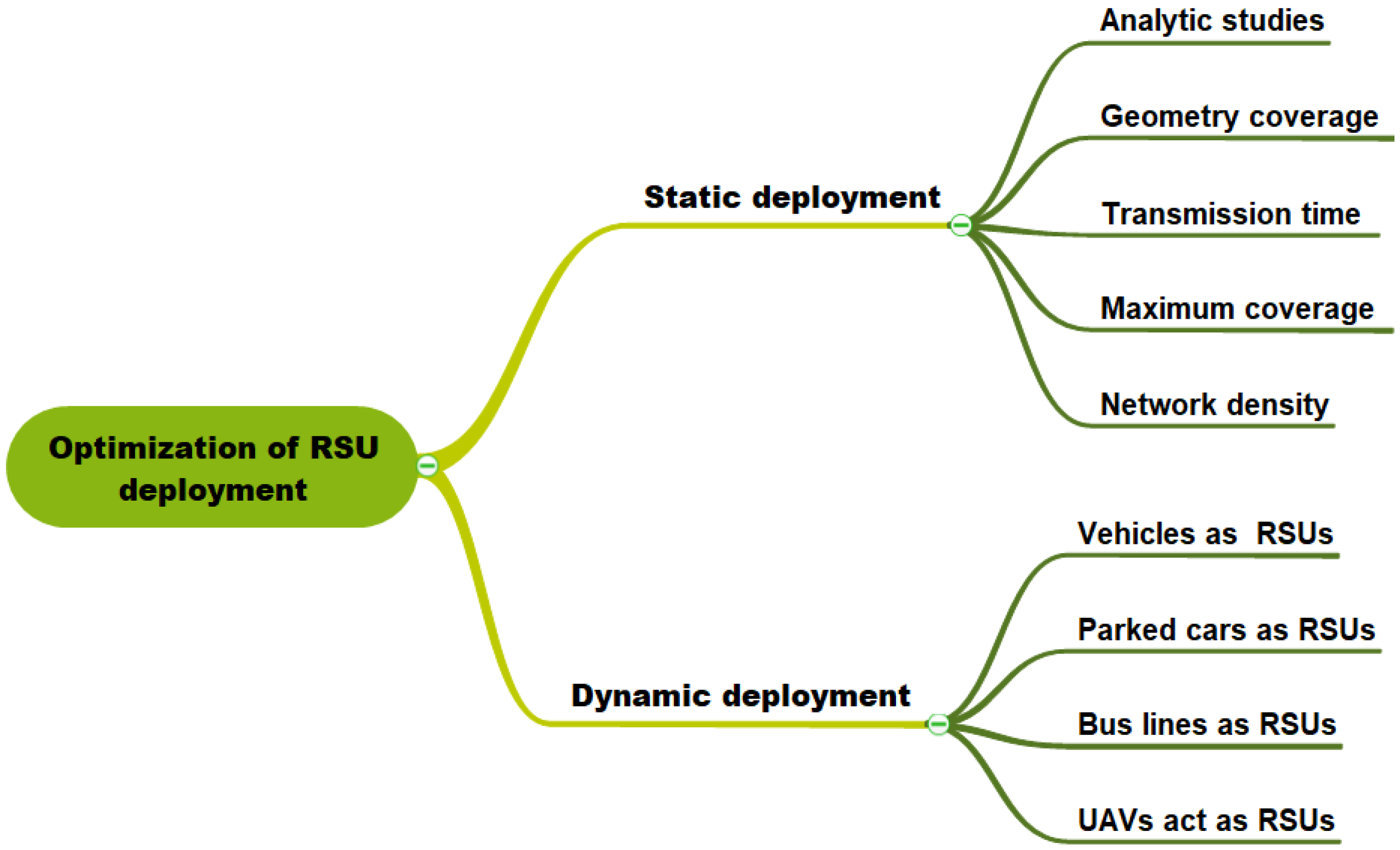
In the research community, an extensive number of papers have been conducted to develop efficient strategies integrating network coverage and low-cost RSU deployment. Depending on the coverage objectives and deployment cost, it was categorized the RSU deployment techniques into two categories: static deployment and dynamic deployment, as shown in Figure 2.
Figure 2. Taxonomy of RSU deployment.
In the static deployment, the RSUs are deployed in a static location on the target geographic areas to improve network coverage towards moving vehicles. On the contrary, dynamic deployment is based on the idea of using some vehicles equipped with an on-board computer and wireless communication device to be used as RSUs. Both static and dynamic VANET RSU deployment strategies are discussed in the next sections.
2.1. Static Deployment
For simplicity, many deployment ones usually assume that RSUs are deployed at fixed locations in the road network. it looks at each of the different research ones, and it was proposed to classify them into five sub-classes according to their models and deployment objectives in the road network, as shown in Figure 2. For each, it was described the proposed model, and the main idea proposed as an optimal solution for RSU deployment in VANET. Moreover, it was performed a qualitative comparison between the different strategies of static RSU deployment.
2.1.1. RSU Deployment Based on Analytic ones
In this sub-class, the RSU deployment issue is based on analysis and mathematical proof to assure the correctness of proposed approaches. Liya et al.
[12] proposed the randomized procedure for estimating an approximate optimal distance
d for deploying the RSUs on the highway such that a security message may be broadcast to RSUs from all accident zones in time
t, with at least a particular probability parameter
p. This distance is estimated by gradually approaching the ideal distance from an initial distance until the VANET is unable to satisfy the connection requirements. The initial distance is estimated as

, where 
is the maximum distance for wireless transmission from one vehicle or one RSU to another vehicle or to another RSU. It was presented a mathematical proof of the correctness of their algorithm. As a critical examination, the approach described appears to be highly promising for large-scale deployments, and it may be able to increase the technique’s efficiency by employing a better strategy for allocating RSUs. Therefore, it is better to explore the wireless mesh backbones, whose placement of RSUs could by ensured by wireless interconnection.
In
[13], it was proposed a Capacity Maximization Placement (CMP) schema to deploy a minimum number of RSUs. This technique is applied in a highway, such that the achievable aggregate throughput in the network can be maximized. In order to allow a vehicle to access RSUs, two scenarios are taken into account; either a direct access to a RSU, when the vehicle is in range transmission of this RSU, or using multi-hop relay if this vehicle is between two RSUs. The hotspots are found by dividing the zone in question into fixed size cells and assigning a coverage value to each cell based on geometrical factors such as wireless interference, vehicle population distribution, and vehicle speed. An integer linear programming (ILP) model is employed to define this problem such that the total flow in the network could be maximized. It was considered the influence of wireless interference, vehicle population distribution, and vehicle speeds in the problem formulation. The results obtained showed that the CMP method surpasses the other two placement strategies, namely, uniformly distribution and hotspot placement, in terms of the aggregate throughput and the deployment budget, the number of RSUs required. However, the problem formulation is purely analytic, not implemented by any algorithm and simulation.
Aslam et al.
[14] implemented two optimization schemes for solving the RSU deployment problem: an analytical method known as Binary Integer Programming (BIP), and a new strategy known as Balloon Expansion Heuristic (BEH). The objective of the methods was to reduce average reporting time, meanwhile ensuring a certain coverage area and a fixed number of RSUs in an urban environment. BIP utilizes the branch and bound approach to find an optimal analytical solution, whereas the BEH heuristic inspires the balloon expansion analogy to find the best solution. In BEH, an RSU coverage area is regarded as a balloon that dilates gradually in the two-dimensional space until the desired percentage of the area covered, under the average reporting time constraint, is obtained. Simulation results confirm that the BEH procedure outperforms the BIP method in terms of the computational cost and scalability. However, this research approach remains simple and did not take into account realistic topologies that include road complexity and obstacles.
In most situations, RSU Deployment (RD) models lack the capacity to depict curve shapedroads and non-uniform statistics on roads. Based on taking into account these characteristics, Gao et al.
[15][16] suggest researching into the RSU deployment considering connectivity in the one-dimensional context, where the road network is considered as one straight line. It was looked at the one-dimensional RSU deployment problem (D1RD), which involves deploying
n RSUs with varying coverage radius under constraints. Given that the search space for the D1RD issue involving several RSUs is enormous in size, it was analysed the attributes of the optimal solutions to the D1RD problem with a single RSU, and then extended it to multiple RSUs in order to reduce the size of the search space. Next, it was proposed a set of approximate algorithms to solve the D1RD problem.
In
[15], it was proposed the Greedy2P3 and Greedy2P3E algorithms to solve the D1RD problem with
n RSUs of different coverage radii. Since the results showed that the approximate ratio of the Greedy2P3 and Greedy2P3E algorithms is at least

, an OptGreDyn approach is developed; it is an optimum solution that combines the greedy and dynamic programming methods. Compared to various existing algorithms, the OptGreDyn approach provides better results in terms of approximate ratio, but better approximation techniques are required for the new RD issue with several heterogeneous RSUs.
In
[16] analysed the attributes of the optimal solutions to the D1RD problem with non-uniform profit density. Then, an efficient approach called Dynamic Limiting (DynLim) was proposed, in which the size of the solution search space is reduced significantly by dynamically modifying search space bounds. Furthermore, based on the DynLim approach, an optimal algorithm named OptDynLim is suggested, and its optimally is demonstrated. Compared to the existing algorithms, the simulation results demonstrated that DynLim can minimize the size of the solution search space by more than 99% in most scenarios. As advantages, the proposed model was validated based on strong theatrical analysis and compared to various existing algorithms. Nerveless, the experimental simulations are tested without any real topology area, they do not consider the network performance metrics, and do not take account the mobility traces.
2.1.2. RSUS Deployment Based on Geometry Coverage Model
In this category, each RSU coverage area is considered as a logical coverage area based on the geometry properties. Specifically, logical coverage areas are dynamically expanding in a two-dimensional space.
Patil and Gokhale
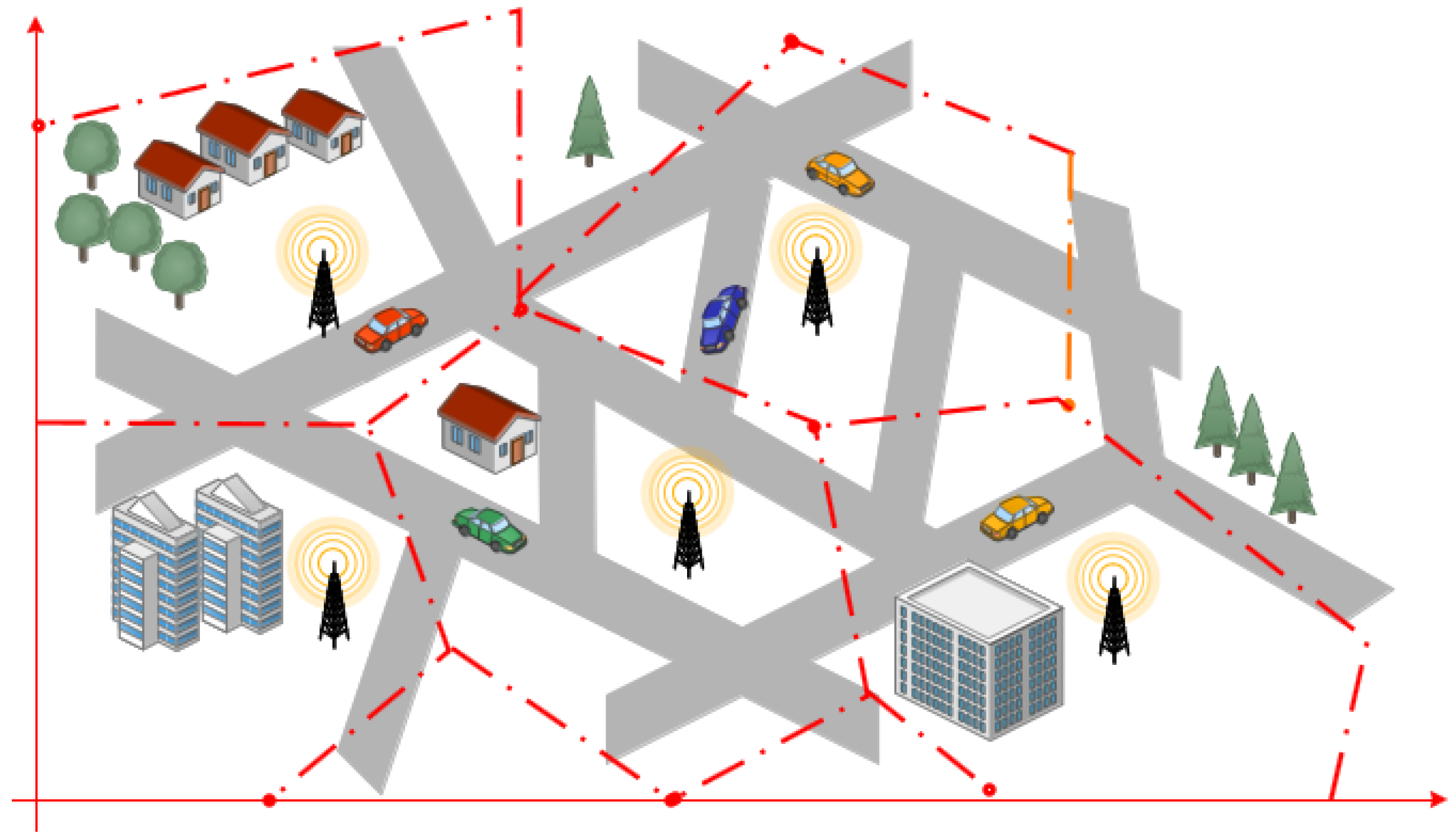
[17] proposed a Voronoï
[18] diagram-based algorithm for the effective RSU deployment taking packet loss and delay into account as criteria. Based on the delay threshold of a packet broadcast between two RSUs, the extensive range of RSU defines the contours of the polygon. Any packet delays exceeding this threshold hinder service availability.
Figure 3 shows the process of the Voronoï diagram, which produces a set of points in convex polygons according to the geographical area, being divided into convex cells. Furthermore, the resulting map of RSUs shows that there are highly probable areas of overlapping between RSUs. To remove overlapping areas and unattended areas, the extended ranges of any two RSUs in a pair overlap are considered neighbors. Many factors, such as traffic density and junction priority, have little effect on this approach. However, the deployment locations determined by this strategy are not always feasible for installing RSUs, as the placement area did not take into account the private land or obstructions like rivers and buildings.
Figure 3. Voronoi diagram approach for RSU deployment in an urban region.
In urban areas, Cheng and all
[19] suggested GeoCover, a geometry-based sparse coverage protocol that investigates the issues of geometrical features of road networks, mobility patterns, and resource limitations. By recognizing hotspots from trace data, GeoCover is capable of depicting mobility patterns and selecting the most valuable road area to be covered. In order to fit the geometrical characteristics, the candidate deployment area is determined using a buffering process based on the road segments’ characteristics. To fulfill budget and quality criteria, the sparse coverage takes into account two variants: Qualified Sparse Coverage (QSC) and Budgeted Sparse Coverage (BSC). To maximize the quality of coverage while respecting the cost under budget constraints, it was suggested two algorithms: GeoCover-genetic and greedy (Greedy Cover) algorithm. This approach provided good coverage with a reasonable delay and scalability as well. It deployed the RSUs in a hotspot area where the majority of the vehicles are congregated. However, in the real world, if the hotspot area changes for whatever reason, the RSUs must deploy according to the new hotspot discovery procedure. Additionally, it was failed to examine the global coverage attained by their strategy.
In
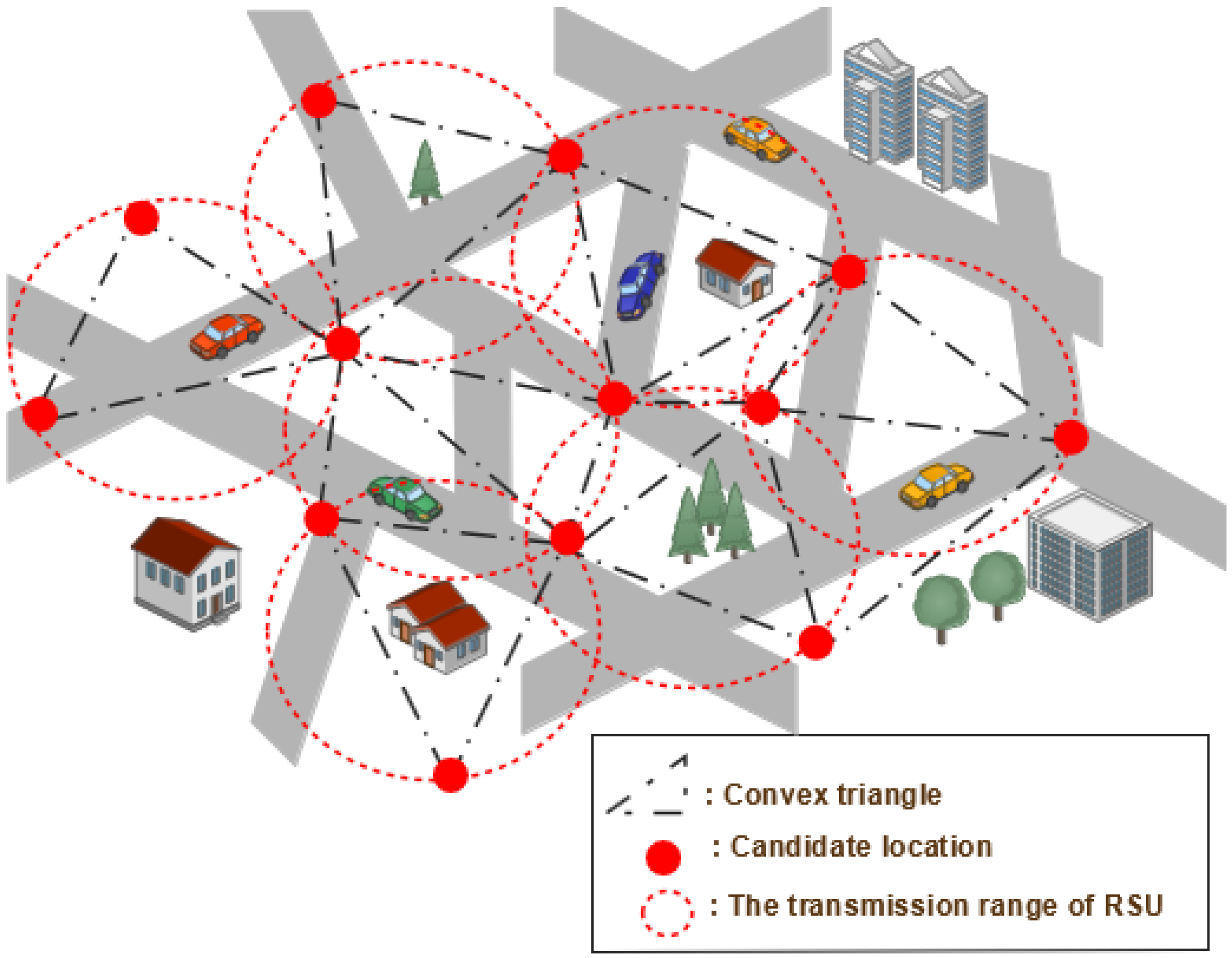
[20], Ghorai and Banerjee modeled the Constrained Delaunay Triangulation (CDT) strategy
[21] to optimize the RSU deployment. As a result, the topological region is divided into several convex triangles, the vertices of which designate the RSU candidate location, such that no other RSUs are inside any triangle’s circumcircle (see
Figure 4).
Figure 4. Constrained Delaunay triangulation approach.
The first target of the proposed approach is to place the RSUs in that obstructed area of an urban topology to attain extensive coverage. Then, an optimization strategy was included to get the optimal RSU location and decrease the communication delay in V2R scenarios. According to simulation findings conducted with varied scenario maps, different numbers of RSUs, different vehicle densities, and different vehicle flows showed that the suggested approach gives good results in terms of packet delivery rate, packet loss, and end-to-end latency compared to the GeoCover algorithm and

-coverage algorithm
[19] methods. However, this strategy only provides better results when the scenario tested has a simple map with fewer obstacles than a medium or complex map.
Fogue et al.
[22] learned the delay-bounded and cost-limited RSU deployment (DBCL) problem in urban VANETs, and transformed the DBCL problem into a variation of the 0–1 Knapsack problem, and a binary differential evolution scheme is proposed to solve it; in particular, it uses a genetic algorithm to increase vehicular communication capabilities and to minimize warning notification time, which is the time required to transmit warning messages to the emergency authorities. It was focused on how to reduce deployment costs by allocating the exact number of RSUs required to provide the appropriate coverage, as well as to improve the communication capabilities of the vehicles in terms of reduced warning notification time. The findings were indicated that DBCL has the capacity to reduce warning notification time, as well as improve vehicular communication capacities in a variety of density and complexity layouts. However, other parameters such as cost of installation and accident information are not incorporated in this design.
2.1.3. RSUs Deployment Based on Transmission Time
In order to transmit delay-sensitive data, the RSU allocation method must be able to collect all traffic data and broadcast it in real-time throughout the network. Liu et al. in
[23] learned the delay of transmitting alert messages along a highway in order to ensure that the alert messages can be transmitted to the nearest RSU within a given delay bound. It is evident that reducing critical delay is to provide an emergency answer in a timely manner. In particular, they provided an analytical approach for analyzing the delay in VANETs with fixed transmission distance. Furthermore, the problem is formulated as a coverage problem because the goal is to cover the roads with RSUs in such a way that emergency notifications are sent to RSUs within the set delay constraint. The vehicles are then divided into clusters, with cluster members communicating with one another in no more than two hops. Messages should be carried by vehicles until they meet an RSU if the vehicle clusters are disconnected. It was developed a genetic algorithm combined with greedy methods to tackle this problem. The simulation results indicated that the solutions are efficient and have a lower time complexity than the existing techniques (greedy and genetic approaches). The relationship between major system factors such as traffic flow density, transmission range, and latency is deduced in this proposal. However, the approach is tested on only one topology.
In
[24], the problem addressed is how to deploy a number of
k RSUs on a highway-like roadway, to maximize network coverage while minimizing the time required for data transmission. This problem is modeled as a Maximum Coverage with Time Threshold Problem (MCTTP), and a genetic algorithm is proposed to solve it. This Time is defined as the minimum time required for a vehicle to contact a RSU and success fully transmits information. The effectiveness of this algorithm depends on two components: fitness and the population initialization process. Fitness is defined as the percentage of covered vehicles in the area. Furthermore, four variants of population initialization are provided: the initialization is completely random, the greedy solution is integrated into the initial random population, the population is half random and half initialized by a modified version of the greedy approach, and the three previous variations are combined. The test results demonstrated that the population initialized by a combination of the greedy method and random initialization outperforms the greedy algorithm (GA). This GA-based technique focuses on V2R communication and does not take cooperative V2V communications into account. Furthermore, the simulation results did not identify the impact on the QoS metrics.
Jalooli et al.
[25] introduced the Safety-Based Disconnected RSU Placement process (S-BRP), which is aimed at minimizing the dissemination time for VANETs’ safety applications in multi-hop broadcast schemes. They assume that road intersections have a high probability of accidents, and they propose to place the RSUs at the intersections. Furthermore, it considers deployment at road segments where the length of the section exceeds the transmission range. Since RSUs are put autonomously without any roadside unit-to-roadside unit (RSU 2 RSU) connection, the RSU installed at a road segment serves as a relay between vehicles. According to this assumption, the absence of (RSU 2 RSU) communication can make the process of deployment very expensive. Hence, this approach needs to find a trade-off between the cost of deploying standalone RSUs and the average dissemination delay.
Ahmed et al.
[26] formulated a RSUs placement as a Delay Minimization Problem (DMP) based on Integer Linear Programming (ILP), whose objective is to minimize network latency while staying within the deployment’s total budget on the highway-like roadway scenario. Compared to uniform distribution and cost-effective strategies, the proposed model gives good results in terms of network latency. However, this approach is compared with a simple strategy of deployment that does not consider vehicles’ mobility. In addition, a few more algorithms can be tested and compared.
Yang et al.
[27] learned the delay-bounded and cost-limited RSU deployment in urban areas. The Binary Differential Evolution-based Optimal RSU deployment approach (BDERD) is proposed to find the best location of RSUs under the constraints of delay and budget. They demonstrate that it is an NP-hard problem, and suggest a binary differential evolution method to optimize the number of roads covered by deploying RSUs. To begin the first generation, opposite-based learning is used, and a binary differential mutation operator is formed to generate binary coding. To augment population diversity, a random variable is incorporated into the standard crossover operator. In addition, a greedy-based individual reparation and promotion algorithm is adopted to repair infeasible solutions that do not satisfy the constraints imposed. Furthermore, following selection, a solution promotion algorithm is run to promote the best solution discovered during generation. The simulation results showed that BDERD has a greater road coverage ratio and lower packet loss than other schemes. However, this not investigated quality-of-service (QoS)-guaranteed RSU deployment in VANETs.
Ni et al.
[28] define the RSU deployment problem in two dimensional (2D) Internet of Vehicles (IoV) networks as a utility-based maximizing problem with an irregular service area for the RSUs. The cost function for their problem is based on the predicted delivery delay requirements, the number of vehicles that may be served concurrently, the benefit of sending the message, and lastly the installation cost. It was considered the idea of a Facility Location Problem (FLP) to solve the RSU deployment problem, then tackle the problem using a clustering algorithm based on Integer Linear Programming (ILP), and finally formulate the difference between a proposed solution and the optimal solution to the problem. Finally, the proposed strategy is evaluated in comparison to a greedy algorithm, an ILP-based algorithm, and a total deployment algorithm. The results demonstrate the effectiveness and superiority of the proposed solution for IoV network service guarantees over other approaches. This approach, however, is not appropriate for low vehicle density since the transmission delay increases owing to multi-hop communication between the vehicles.
Silva et al.
[29] considered that the optimal streaming transmission requires knowing the share of vehicles that periodically contact the RSUs in time intervals smaller than a given threshold. Based on the share of vehicles and time threshold, they proposed the gamma deployment approach defining the location and number of roadside units required for providing the specific coverage. To evaluate this approach, the gamma-related deployment strategy is proposed to ensure that a certain percentage of vehicles consuming data streams passes through small islands of coverage provided by roadside units on a regular basis in order to obtain additional data until reaching the next island of coverage. The gamma-related deployment strategy is then extended to take into account the data transfer rate at which vehicles receive data from roadside units, as well as the data consumption rate of streaming within vehicles, yielding the Gamma-Reload deployment approach. Compared to the RSU deployment strategy based on road density, the proposed approach may achieve significant economy on the costs for setting up the communication network, while providing similar QoS. However, it did not consider multi-hop communications to measure the vehicles connectivity (for example, how can it be evaluated the connection supplied by the infrastructure-based network, and which sites must be covered first in order to improve network performance when a certain aim is in mind?). In addition, the assumption of Gamma-Reload did not extend to vehicle-to-vehicle communication (i.e., it did not rely on disseminating data, requiring less performance from the infrastructure).
2.1.5. RSU Deployment Based on Network Density
RSU deployment based on network density considers the density when searching for potential parameter locations for deploying RSUs. Furthermore, the network coverage is greater at a placement with dense traffic than at locations with light traffic.
Locher et al.
[30] presented the RSU deployment approach according to a landmark-based aggregation scheme for economy travel time data in road networks. In addition, the landmark-based aggregation system disseminates information about travel time between important points and landmark locations in order to determine how much time a specific active RSU location vector may save. Cars crossing a road segment can carry out an observation of the current travel time between two neighboring landmarks. To identify the optimal placement of supporting units (SUs), an estimate of travel time data is employed as fitness indicators in genetic algorithms. The main advantage of this approach is that it minimizes the required overall bandwidth via a specific aggregation scheme. However, the deployment system concentrated on information aggregation instead of data dissemination. In addition, in real traffic, the vehicles’ movements are unpredictable due to both human and environmental factors.
Chi et al.
[31] introduced the intersection priority concept to preferably place RSUs at important intersections. Since network coverage becomes optimal at intersections, RSU deployment based on intersections considers them as candidate RSU deployment locations. Consequently, network coverage is better at a densely trafficked intersection than at a light-trafficked intersection. Three algorithms are presented to serve this purpose: greedy, dynamic, and hybrid algorithms. The greedy algorithm provides a priority list in descending order, and starts by placing the first RSU at the highest intersection priority; then, the intersection located within the transmission range of the RSU is excluded from the priority list. Despite its simplicity, this algorithm can lead to a situation where different RSU transmission ranges will be unnecessarily overlapped. To limit the size of the overlapping region, the dynamic algorithm focuses on ensuring an equitable distribution of RSUs. Finally, the hybrid method combines greedy and dynamic algorithms to distribute RSUs as evenly as possible while maintaining the intersection priority order. The simulation results were showed that the dynamic approach provides the best performance, while the hybrid approach produces a middle level of performance between the greedy and the dynamic approaches. As a limitation, it did not consider the impact of network connectivity on RSU deployment schemes.
Based on the simulation of the urban environment, Barrachina et al.
[32] developed a density-based RSU deployment (D-RSU) strategy for delivering emergency-alerting services with the lowest feasible cost in the event of an accident. In urban areas, sites with a high density of vehicles are usually important; consequently, more RSUs should be deployed in these areas. This approach aims to place the RSU in an inverse proportion to the expected density. It was concluded that, by deploying RSUs in this manner, a uniform coverage area may be achieved, regardless of considerations like traffic density or road network topology. Most importantly, this deployment approach prevents RSUs from being consolidated in a single location, but the cost of deploying RSUs according to the uniform Mesh deployment policy is expensive. In addition, it does not take into account the street structure of each region when determining the best position for the available RSUs.
Sankaranarayanan et al.
[33] suggested an Optimal RSU Distribution Planner (ORDP) based on a Fusion Algorithm (FA) that relies on Evolutionary Genetic Algorithm (EGA) and D-Trimming. Here, d-trimming is a strategy that helps with reducing the number of RSUs proposed by the genetic algorithm depending on whether two routes can be served by a single RSU. ORDP takes into account the traffic density of a road segment, the budget, important road segments, a roadway’s accident history, and the transmission capabilities of an RSU. The scalability and efficiency of the planner are evaluated using simulated and realistic data sets, and it is discovered that ORDP outperforms alternative greedy techniques based on experiments focused on the city of Tamil Nadu, India. This framework allows the user to select the proper parameter configuration based on their needs that affect the decision of installing the RSU component, making the model viable and efficient. As limitations, this system does not include QoS parameters such as data transmission speed and delay.
2.2. Dynamic Deployment
The RSU deployment techniques that are based on a dynamic deployment are discussed in this subsection. Furthermore, instead of relying on expensive roadside infrastructure (such as RSUs), DSRC-equipped cars can serve as RSUs. In fact, vehicles utilized as temporary RSUs, parked cars used as RSUs, bus lines used as RSUs, and Unmanned Aerial Vehicles (UAVs) acting as RSUs are among the four sub-classes of RSU deployment techniques. It is worth noting that a lot of current research views dynamic deployment as a special technique for improving network connection. Furthermore, it did a qualitative evaluation of the various deployment options for dynamic RSUs, which was performed a qualitative comparison between the different approaches above.
2.2.1. Vehicle Used as Temporary RSU
Ozan and Viriyasitavat in
[34] proposed a new system known as a biologically inspired self-organizing network to allow some cars equipped with DSRC devices to be employed as temporary RSUs; the dynamic component of this placement technique is reflected by the dynamic selection of the cars. To provide a temporary RSU, a vehicle engaged in the collision (or a police car) can make a brief stop to execute the functions of a conventional RSU, such as disseminating security alerts to neighboring cars, where a gift-wrapping algorithm is proposed to meet these needs
[35]. Such findings demonstrated that, unlike security messages, other forms of communications may be used. This approach is very useful, but it is limited by several assumptions. When the automobiles are too far away from one another, the communication link disconnects itself. Furthermore, the stops of ordinary cars (temporary RSUs) still leave a question mark on the system’s robustness and dependability.
2.2.2. Parked Cars Used as RSUs
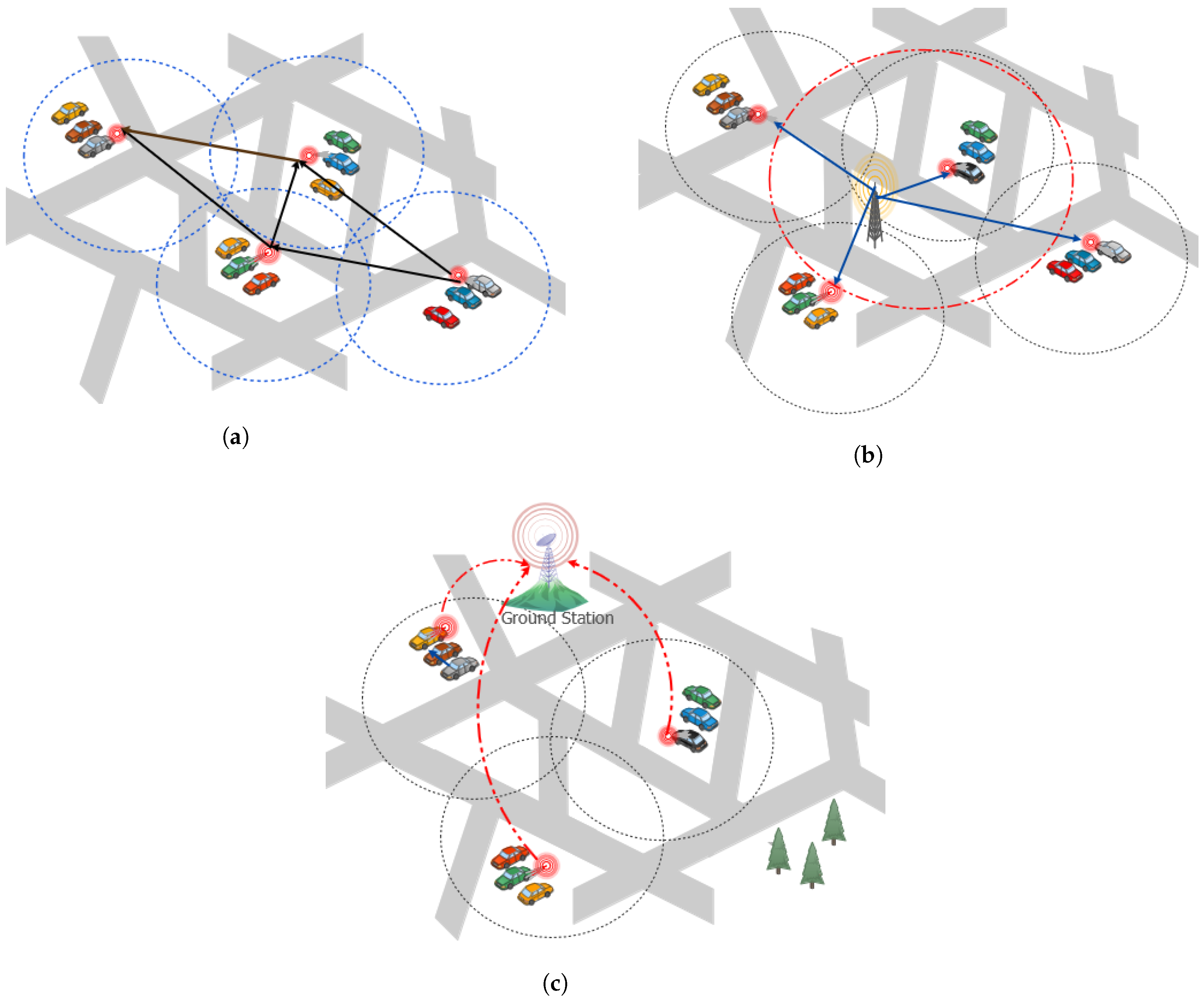
The existence of large numbers of parked cars is a motivation to give those cars the role of RSUs using a self-organizing approach. This approach consists of three modes (Figure 5 summarizes these three modes). When there are no fixed RSUs in the urban area, parked cars create a network to support network connectivity to other moving vehicles (see Figure 5a). If there is a limited number of fixed RSUs in the area, parked cars in the vicinity of an RSU can act as relays to other nodes, extending the transmission range of the current fixed RSU (see Figure 5b). A parked car which is linked to a backbone uplink can leverage that link via the Internet, and thus establish itself as a standalone RSU (see Figure 5c).
Figure 5. Modes of operation for parked cars acting as RSUs. (a) Parked cars form a mesh network with point-to-point links to other parked cars. (b) Parked cars extend the range of a fixed 802.11p RSU, acting as relays to it. (c) Parked cars with access to an uplink establish them selves as standalone RSUs.
2.2.3. Bus Line Management as RSU
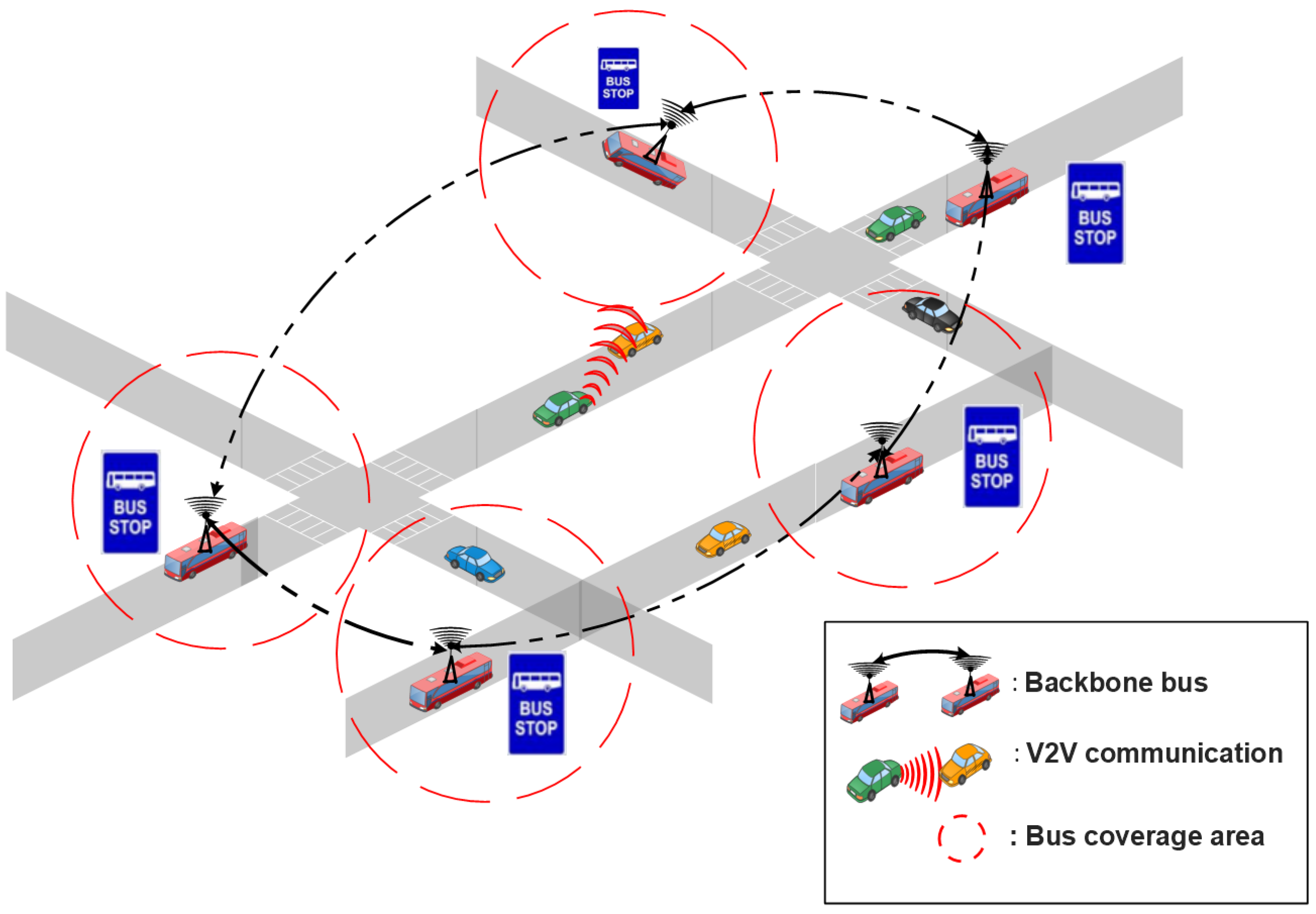
When there are no fixed RSUs existing in the urban area, the buses can constitute the backbone network, and can also play an important role in improving the messages dissemination process, as presented in Figure 6. Whenever there is a limited number of fixed RSUs, bus lines can be used as relay nodes to serve the data traffic between the vehicles and the existing RSUs.
Figure 6. Mobile infrastructure based on backbone bus.
Reis et al. in
[36] developed a dynamic framework to enhance
[37]. This type of solution is based on three modes of operation for parked cars in urban topologies. For all these modes, coverage maps will be generated for each individual car based on received signal power, dividing the urban areas into logical 2D cell maps. It was designed and exploited DSRC radio signal strength measurements to evaluate obstacles and assure effective coverage by neighboring parked cars. In order to save energy in parked cars, it was provided a dynamic decision procedure for determining whether a vehicle should become an RSU or enter a sleep mode. Simulation results revealed that a low number of parked cars in the urban area provided great connection coverage. Furthermore, the usage of such a relay system for a parking time of less than one day has no negative influence on the vehicle’s usefulness. Nerveless, regardless of the mode of operation (active/sleep), the parked automobiles are energy-constrained and can stop parking at any moment.
Jiang and Du
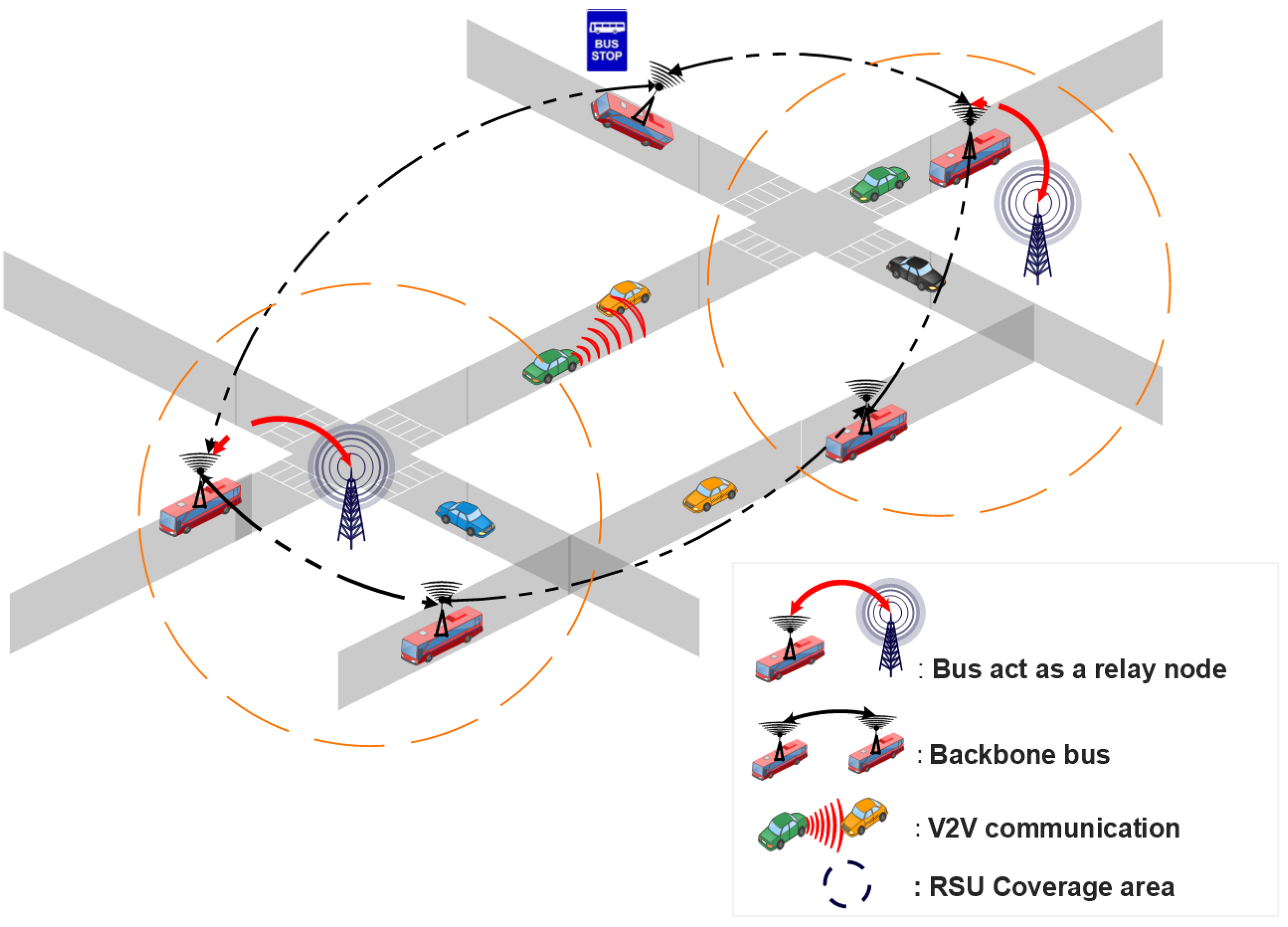
[38] proposed a two-tier architecture called BUS-VANET, based on high-tier and low-tier that leverages upon the predictable routes and timetables of buses. The high-tier comprises RSUs, Traffic Control Centers (TCCs), and bus routes. The automobiles equipped with DSRC devices, on the other hand, comprise the low-tier. When a low-tier node wishes to transmit a message, it must first register with a neighboring high-tier node in order to ascertain the delivery path given by the high-tier node. This architecture is summarized in
Figure 7. The simulation results revealed that the two-tier BUS-VANET has the shortest delivery delay and the highest packet delivery ratio. Nonetheless, in the situation of a sparse road network, this technique did not take into consideration transmission services supplied by existing RSUs to provide the best QoS communications.
Figure 7. Mobile infrastructure based on VANET architecture.
Kim et al.
[39] suggested a new framework called the Budgeted Maximum Coverage Problem (BMCP) to optimize RSU deployment under a limited budget. Due to the high cost of a massive RSU deployment in wide metropolitan areas, this framework combines three different RSU deployment strategies: static, public mobile nodes (i.e., Buses) that are not controllable, and fully controllable mobile nodes (for example, vehicles). The proposed approach consists of two steps, each of which uses a directed acyclic graph. For solving the maximum coverage problem, a greedy algorithm is applied in the first stage. To address the maximum coverage budget issue, the second stage similarly employs a greedy method. When compared to the situation of using a single deployment approach, the simulation results revealed that this framework provides a cost effective solution. As a limit, it was hypothesized that all mobile transportation does not suffer from any delay, and that the controllable mobile nodes do not suffer from traffic jams, which is not always in a realistic situation.
To achieve efficient vehicle communication in highway scenarios, Lee and Ahn
[40] suggested an adaptive configuration strategy for placing mobile RSUs (mRSUs) in a backbone network in a cost effective manner. To formulate this problem, it was used a binary linear programming model that considered the distribution of vehicles, wireless interference, and the speed of vehicles. This model facilitated the vehicle to access the RSUs with direct V2R communication, or with multi-hop relaying when the vehicles are outside the transmission range of the RSU. In addition, this model describes a process in which a roadside unit decides its state (active or inactive) based on the neighbor roadside unit and vehicles. Simulation results confirmed the performance of this model compared to hot-spot placement and uniform distribution of RSUs placement in terms of maximized cumulative throughput, cost effectiveness, and efficient placement. However, in an urban road environment, there are many more aspects to consider, such as direction, traffic signals, and so on, necessitating more careful mRSU management.
Heo et al.
[41] show how static roadside units (sRSUs) can be replaced by buses used as mobile ones (mRSUs) in order to minimize the deployment and management costs and maximize the contact coverage between vehicles and roadside units using vehicle-to-infrastructure (V2I) communication. The performance trade-off and cost of using buses as mRSUs are addressed using mathematical analysis as well as real-world experiments that show that replacing static RSUs with mRSUs can maintain the same level of throughput, contact time, and inter-contact time as a function of replacement ratio. However, the scale of the experiment cannot match that of the simulation one due to practical constraints.
2.2.4. Unmanned Aerial Vehicles Acting as RSUs
Unmanned Aerial Vehicles (UAVs), also known as drones, have recently experienced a significant adoption in the context of smart cities to overcome the limitations of communications between vehicles
[42]. Several constraints have been acknowledged in VANETs, such as the limited number of RSUs, the high mobility of vehicles, existing obstacles, etc. These issues can be addressed by using UAVs as suitable candidates for improving the performance of vehicular networks
[43]. Combining VANETs and UAVs also has advantages in terms of line-of-sight communication, load balancing, flexibility, and cost effectiveness. In particular, the UAVs can act as mobile RSUs and collect information from an area of interest, and transmit that information to vehicles, static RSUs, and other nearby UAVs
[44]. There are several communication mechanisms available, including V2V, UAV-to-UAV (U2U), and Vehicle-to-UAV (V2U); such mechanisms rely on pure ad-hoc communications without any fixed infrastructure. Vehicle-to-Roadside-Unit (V2R) and UAV-to-roadside units (U2R) are established only when certain applications need to be run, such as Internet access.
Based on this concept, Oubbati et al. in
[45] conceived a novel UAV-assisted reactive and flooding-based routing protocol that included a predictive technique to estimate the expiration time of discovered routing paths. It considers UAVs cooperating with road vehicles on an ad hoc manner to offer reliable routing paths. In this work, an algorithm that considers dynamic network topology was developed under the assumption that UAVs have complete knowledge of the device location. It has been investigated that optimal flight trajectories for UAVs can improve the ad hoc network connectivity. The experimental results of this research activity showed that the UAV-assisted VANET performed significantly better in terms of data delivery ratio and delay. However, the adopted discovery strategy may result in a high overhead, particularly in areas with a high vehicle density.
 +1 credit
+1 credit