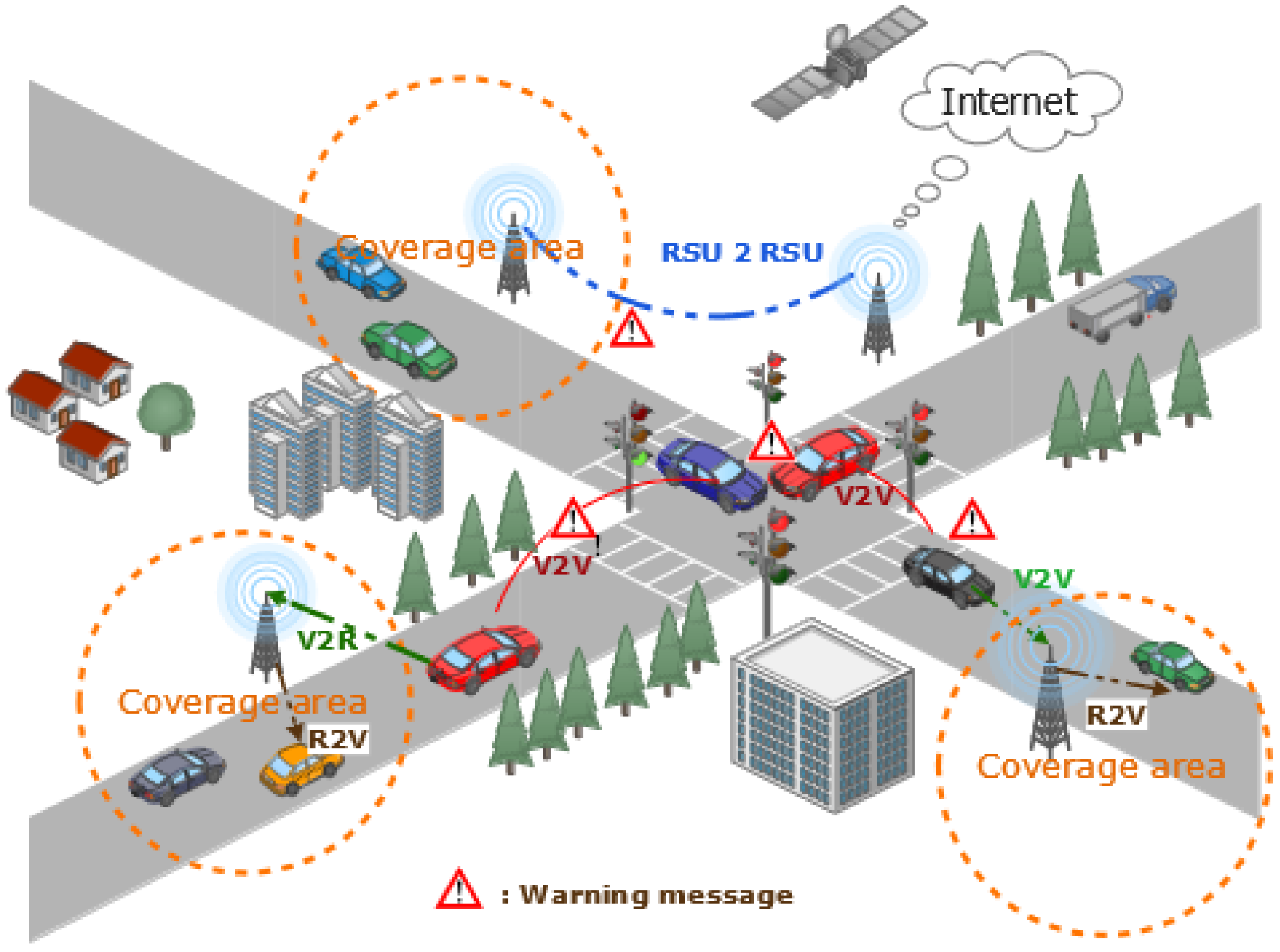
The network technology known as Internet of Vehicles (IoV) has been developed to improve road safety and vehicle security, with the goal of servicing the digital demands of car drivers and passengers. The highly dynamical network topology that characterizes these networks, and which often leads to discontinuous transmissions, is one of the most significant challenges of IoV. To address this issue, IoV infrastructure-based components known as roadside units (RSU) are designed to play a critical role by providing continuous transmission coverage and permanent connectivity. The main challenges that arise when deploying RSUs are balancing IoVs’ performances and total cost so that optimal vehicle service coverage is provided with respect to some target Quality of Service (QoS) such as: service coverage, throughput, low latency, or energy consumption.
- VANET
- Internet of Vehicles (IoV)
- roadside unit (RSU)
- static deployment
- dynamic deployment
1. Vehicular Networking: Definition and Deployment
2. Taxonomy of RSU Deployment
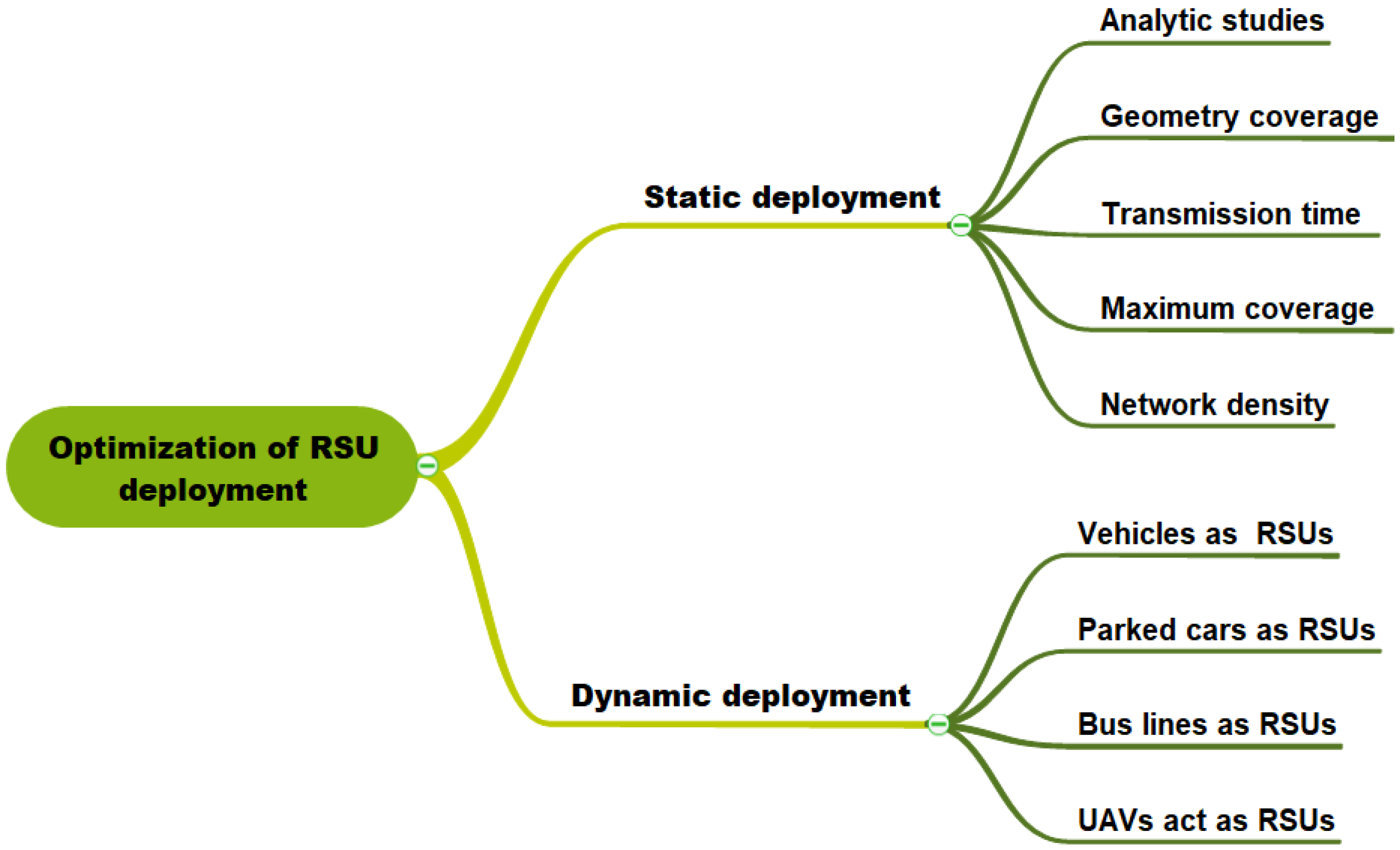
2.1. Static Deployment
2.1.1. RSU Deployment Based on Analytic ones

, where 
 , an OptGreDyn approach is developed; it is an optimum solution that combines the greedy and dynamic programming methods. Compared to various existing algorithms, the OptGreDyn approach provides better results in terms of approximate ratio, but better approximation techniques are required for the new RD issue with several heterogeneous RSUs.
, an OptGreDyn approach is developed; it is an optimum solution that combines the greedy and dynamic programming methods. Compared to various existing algorithms, the OptGreDyn approach provides better results in terms of approximate ratio, but better approximation techniques are required for the new RD issue with several heterogeneous RSUs.2.1.2. RSUS Deployment Based on Geometry Coverage Model
 -coverage algorithm [19] methods. However, this strategy only provides better results when the scenario tested has a simple map with fewer obstacles than a medium or complex map.
-coverage algorithm [19] methods. However, this strategy only provides better results when the scenario tested has a simple map with fewer obstacles than a medium or complex map.2.1.3. RSUs Deployment Based on Transmission Time
2.1.5. RSU Deployment Based on Network Density
RSU deployment based on network density considers the density when searching for potential parameter locations for deploying RSUs. Furthermore, the network coverage is greater at a placement with dense traffic than at locations with light traffic. Locher et al. [30] presented the RSU deployment approach according to a landmark-based aggregation scheme for economy travel time data in road networks. In addition, the landmark-based aggregation system disseminates information about travel time between important points and landmark locations in order to determine how much time a specific active RSU location vector may save. Cars crossing a road segment can carry out an observation of the current travel time between two neighboring landmarks. To identify the optimal placement of supporting units (SUs), an estimate of travel time data is employed as fitness indicators in genetic algorithms. The main advantage of this approach is that it minimizes the required overall bandwidth via a specific aggregation scheme. However, the deployment system concentrated on information aggregation instead of data dissemination. In addition, in real traffic, the vehicles’ movements are unpredictable due to both human and environmental factors. Chi et al. [31] introduced the intersection priority concept to preferably place RSUs at important intersections. Since network coverage becomes optimal at intersections, RSU deployment based on intersections considers them as candidate RSU deployment locations. Consequently, network coverage is better at a densely trafficked intersection than at a light-trafficked intersection. Three algorithms are presented to serve this purpose: greedy, dynamic, and hybrid algorithms. The greedy algorithm provides a priority list in descending order, and starts by placing the first RSU at the highest intersection priority; then, the intersection located within the transmission range of the RSU is excluded from the priority list. Despite its simplicity, this algorithm can lead to a situation where different RSU transmission ranges will be unnecessarily overlapped. To limit the size of the overlapping region, the dynamic algorithm focuses on ensuring an equitable distribution of RSUs. Finally, the hybrid method combines greedy and dynamic algorithms to distribute RSUs as evenly as possible while maintaining the intersection priority order. The simulation results were showed that the dynamic approach provides the best performance, while the hybrid approach produces a middle level of performance between the greedy and the dynamic approaches. As a limitation, it did not consider the impact of network connectivity on RSU deployment schemes. Based on the simulation of the urban environment, Barrachina et al. [32] developed a density-based RSU deployment (D-RSU) strategy for delivering emergency-alerting services with the lowest feasible cost in the event of an accident. In urban areas, sites with a high density of vehicles are usually important; consequently, more RSUs should be deployed in these areas. This approach aims to place the RSU in an inverse proportion to the expected density. It was concluded that, by deploying RSUs in this manner, a uniform coverage area may be achieved, regardless of considerations like traffic density or road network topology. Most importantly, this deployment approach prevents RSUs from being consolidated in a single location, but the cost of deploying RSUs according to the uniform Mesh deployment policy is expensive. In addition, it does not take into account the street structure of each region when determining the best position for the available RSUs. Sankaranarayanan et al. [33] suggested an Optimal RSU Distribution Planner (ORDP) based on a Fusion Algorithm (FA) that relies on Evolutionary Genetic Algorithm (EGA) and D-Trimming. Here, d-trimming is a strategy that helps with reducing the number of RSUs proposed by the genetic algorithm depending on whether two routes can be served by a single RSU. ORDP takes into account the traffic density of a road segment, the budget, important road segments, a roadway’s accident history, and the transmission capabilities of an RSU. The scalability and efficiency of the planner are evaluated using simulated and realistic data sets, and it is discovered that ORDP outperforms alternative greedy techniques based on experiments focused on the city of Tamil Nadu, India. This framework allows the user to select the proper parameter configuration based on their needs that affect the decision of installing the RSU component, making the model viable and efficient. As limitations, this system does not include QoS parameters such as data transmission speed and delay.2.2. Dynamic Deployment
The RSU deployment techniques that are based on a dynamic deployment are discussed in this subsection. Furthermore, instead of relying on expensive roadside infrastructure (such as RSUs), DSRC-equipped cars can serve as RSUs. In fact, vehicles utilized as temporary RSUs, parked cars used as RSUs, bus lines used as RSUs, and Unmanned Aerial Vehicles (UAVs) acting as RSUs are among the four sub-classes of RSU deployment techniques. It is worth noting that a lot of current research views dynamic deployment as a special technique for improving network connection. Furthermore, it did a qualitative evaluation of the various deployment options for dynamic RSUs, which was performed a qualitative comparison between the different approaches above.2.2.1. Vehicle Used as Temporary RSU
Ozan and Viriyasitavat in [34] proposed a new system known as a biologically inspired self-organizing network to allow some cars equipped with DSRC devices to be employed as temporary RSUs; the dynamic component of this placement technique is reflected by the dynamic selection of the cars. To provide a temporary RSU, a vehicle engaged in the collision (or a police car) can make a brief stop to execute the functions of a conventional RSU, such as disseminating security alerts to neighboring cars, where a gift-wrapping algorithm is proposed to meet these needs [35]. Such findings demonstrated that, unlike security messages, other forms of communications may be used. This approach is very useful, but it is limited by several assumptions. When the automobiles are too far away from one another, the communication link disconnects itself. Furthermore, the stops of ordinary cars (temporary RSUs) still leave a question mark on the system’s robustness and dependability.2.2.2. Parked Cars Used as RSUs
The existence of large numbers of parked cars is a motivation to give those cars the role of RSUs using a self-organizing approach. This approach consists of three modes (Figure 5 summarizes these three modes). When there are no fixed RSUs in the urban area, parked cars create a network to support network connectivity to other moving vehicles (see Figure 5a). If there is a limited number of fixed RSUs in the area, parked cars in the vicinity of an RSU can act as relays to other nodes, extending the transmission range of the current fixed RSU (see Figure 5b). A parked car which is linked to a backbone uplink can leverage that link via the Internet, and thus establish itself as a standalone RSU (see Figure 5c).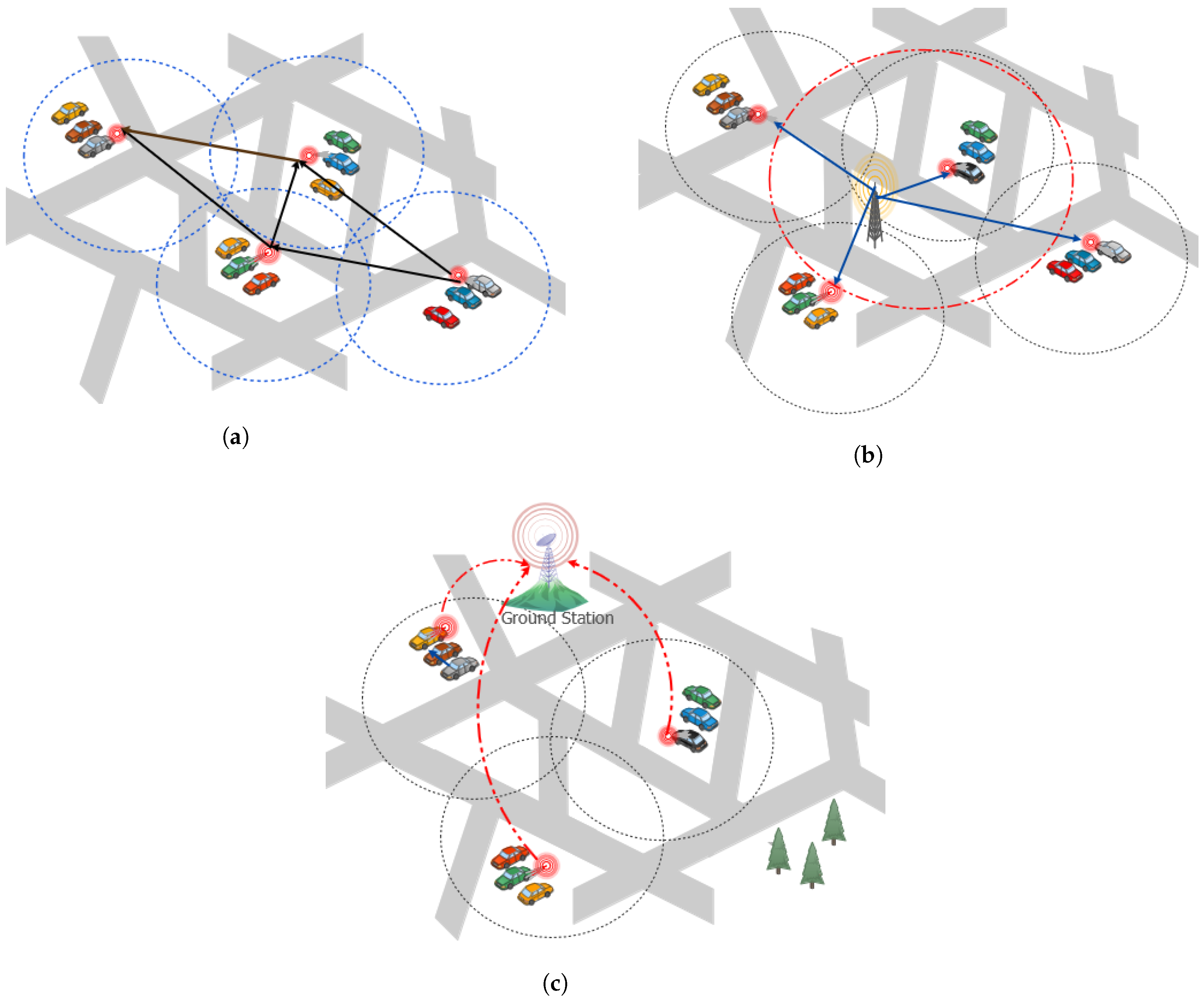
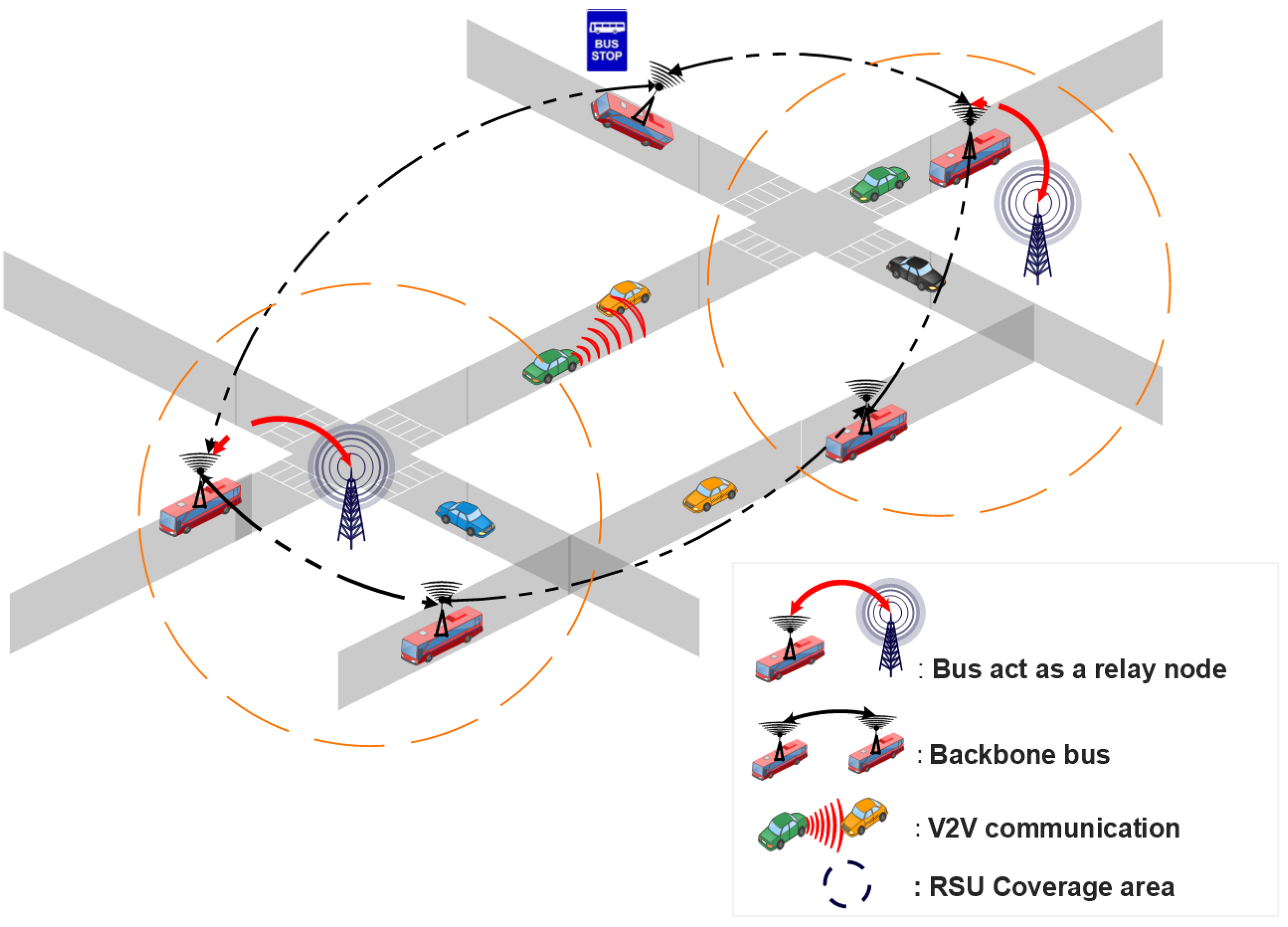
2.2.3. Bus Line Management as RSU
When there are no fixed RSUs existing in the urban area, the buses can constitute the backbone network, and can also play an important role in improving the messages dissemination process, as presented in Figure 6. Whenever there is a limited number of fixed RSUs, bus lines can be used as relay nodes to serve the data traffic between the vehicles and the existing RSUs.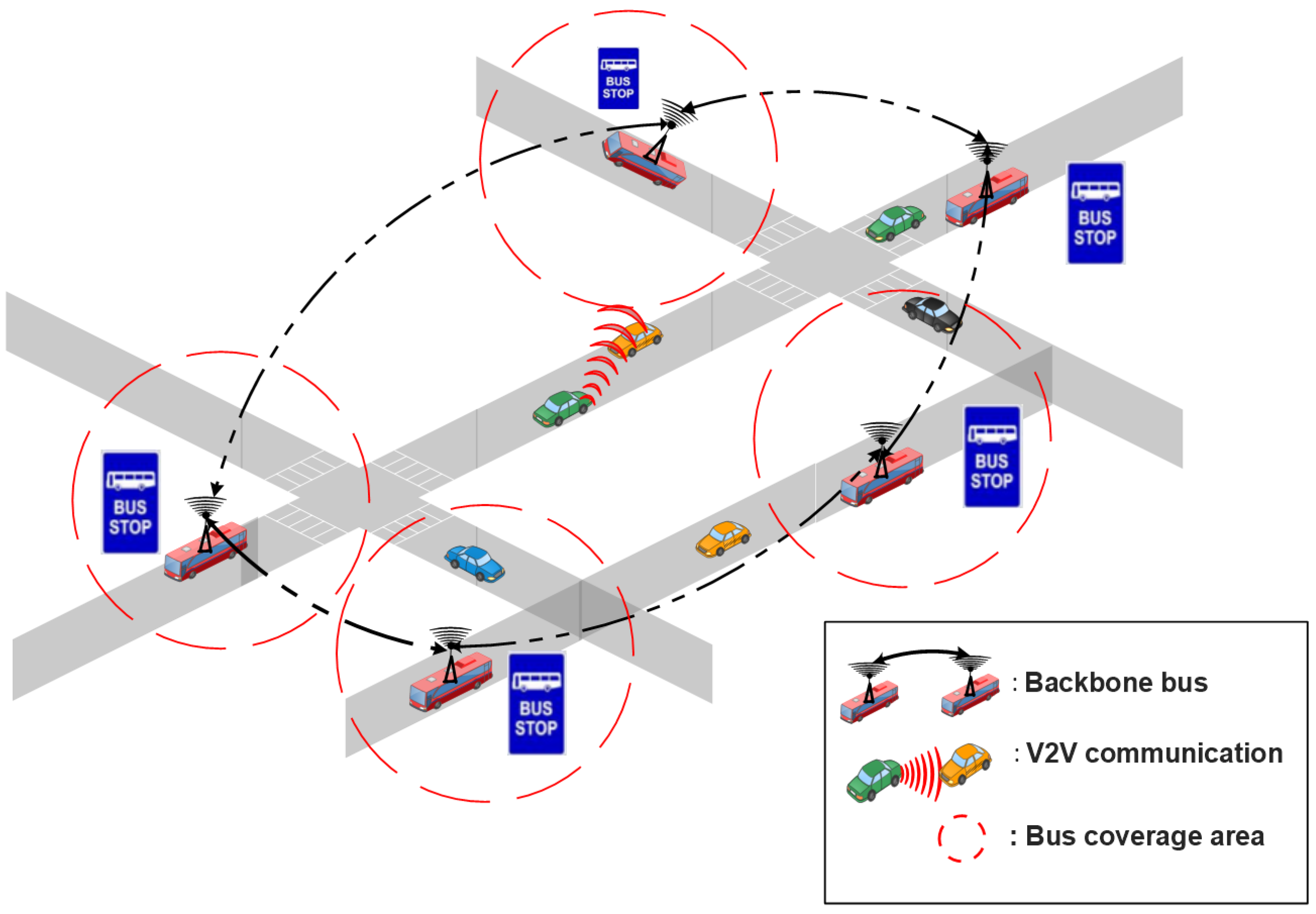
2.2.4. Unmanned Aerial Vehicles Acting as RSUs
Unmanned Aerial Vehicles (UAVs), also known as drones, have recently experienced a significant adoption in the context of smart cities to overcome the limitations of communications between vehicles [42]. Several constraints have been acknowledged in VANETs, such as the limited number of RSUs, the high mobility of vehicles, existing obstacles, etc. These issues can be addressed by using UAVs as suitable candidates for improving the performance of vehicular networks [43]. Combining VANETs and UAVs also has advantages in terms of line-of-sight communication, load balancing, flexibility, and cost effectiveness. In particular, the UAVs can act as mobile RSUs and collect information from an area of interest, and transmit that information to vehicles, static RSUs, and other nearby UAVs [44]. In this case, tThere are several communication mechanisms available, including V2V, UAV-to-UAV (U2U), and Vehicle-to-UAV (V2U); such mechanisms rely on pure ad-hoc communications without any fixed infrastructure. Vehicle-to-Roadside-Unit (V2R) and UAV-to-roadside units (U2R) are established only when certain applications need to be run, such as Internet access. Based on this concept, Oubbati et al. in [45] conceived a novel UAV-assisted reactive and flooding-based routing protocol that included a predictive technique to estimate the expiration time of discovered routing paths. It considers UAVs cooperating with road vehicles on an ad hoc manner to offer reliable routing paths. In this work, an algorithm that considers dynamic network topology was developed under the assumption that UAVs have complete knowledge of the device location. It has been investigated that optimal flight trajectories for UAVs can improve the ad hoc network connectivity. The experimental results of this research activity showed that the UAV-assisted VANET performed significantly better in terms of data delivery ratio and delay. However, the adopted discovery strategy may result in a high overhead, particularly in areas with a high vehicle density.References
- Yousefi, S.; Mousavi, M.S.; Fathy, M. Vehicular ad hoc networks (VANETs): Challenges and perspectives. In Proceedings of the 2006 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 761–766.
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20.
- Zeadally, S.; Hunt, R.; Chen, Y.S.; Irwin, A.; Hassan, A. Vehicular ad hoc networks (VANETS): Status, results, and challenges. Telecommun. Syst. 2012, 50, 217–241.
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular ad hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392.
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182.
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616.
- Dar, K.; Bakhouya, M.; Gaber, J.; Wack, M.; Lorenz, P. Wireless communication technologies for ITS applications . IEEE Commun. Mag. 2010, 48, 156–162.
- Da Cunha, F.D.; Boukerche, A.; Villas, L.; Viana, A.C.; Loureiro, A.A. Data Communication in VANETs: A Survey, Challenges and Applications. Ph.D. Thesis, INRIA Saclay, Palaiseau, France, 2014.
- Malik, R.; Zaidan, A.; Zaidan, B.; Ramli, K.; Albahri, O.; Kareem, Z.; Ameen, H.; Garfan, S.; Mohammed, A.; Zaidan, R.; et al. Novel roadside unit positioning framework in the context of the vehicle-to-infrastructure communication system based on AHP—Entropy for weighting and borda—VIKOR for uniform ranking. Int. J. Inf. Technol. Decis. Mak. 2021, 1–34.
- Mejri, M.N.; Ben-Othman, J.; Hamdi, M. Survey on VANET security challenges and possible cryptographic solutions. Veh. Commun. 2014, 1, 53–66.
- Ghori, M.R.; Zamli, K.Z.; Quosthoni, N.; Hisyam, M.; Montaser, M. Vehicular ad-hoc network (VANET). In Proceedings of the 2018 IEEE International Conference on Innovative Research and Development (ICIRD), Bangkok, Thailand, 11 May 2018; pp. 1–6.
- Liya, X.; Chuanhe, H.; Peng, L.; Junyu, Z. A randomized algorithm for roadside units placement in vehicular ad hoc network. In Proceedings of the 2013 IEEE 9th International Conference on Mobile Ad-hoc and Sensor Networks, Dalian, China, 11–13 December 2013; pp. 193–197.
- Wu, T.J.; Liao, W.; Chang, C.J. A cost-effective strategy for road-side unit placement in vehicular networks. IEEE Trans. Commun. 2012, 60, 2295–2303.
- Aslam, B.; Amjad, F.; Zou, C.C. Optimal roadside units placement in urban areas for vehicular networks. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 000423–000429.
- Gao, Z.; Chen, D.; Cai, S.; Wu, H.C. Optimal and greedy algorithms for the one-dimensional RSU deployment problem with new model. IEEE Trans. Veh. Technol. 2018, 67, 7643–7657.
- Gao, Z.; Chen, D.; Cai, S.; Wu, H.C. Optdynlim: An optimal algorithm for the one-dimensional rsu deployment problem with nonuniform profit density. IEEE Trans. Ind. Inform. 2018, 15, 1052–1061.
- Patil, P.; Gokhale, A. Voronoi-based placement of road-side units to improve dynamic resource management in vehicular ad hoc networks. In Proceedings of the 2013 International Conference on Collaboration Technologies and Systems (CTS), San Diego, CA, USA, 20–24 May 2013; pp. 389–396.
- Aurenhammer, F. Voronoi diagrams—A survey of a fundamental geometric data structure. ACM Comput. Surv. (CSUR) 1991, 23, 345–405.
- Cheng, H.; Fei, X.; Boukerche, A.; Almulla, M. GeoCover: An efficient sparse coverage protocol for RSU deployment over urban VANETs. Ad Hoc Netw. 2015, 24, 85–102.
- Ghorai, C.; Banerjee, I. A constrained Delaunay Triangulation based RSUs deployment strategy to cover a convex region with obstacles for maximizing communications probability between V2I. Veh. Commun. 2018, 13, 89–103.
- Chew, L.P. Constrained delaunay triangulations. Algorithmica 1989, 4, 97–108.
- Fogue, M.; Sanguesa, J.A.; Martinez, F.J.; Marquez-Barja, J.M. Improving roadside unit deployment in vehicular networks by exploiting genetic algorithms. Appl. Sci. 2018, 8, 86.
- Liu, C.; Huang, H.; Du, H. Optimal RSUs deployment with delay bound along highways in VANET. J. Comb. Optim. 2017, 33, 1168–1182.
- Cavalcante, E.S.; Aquino, A.L.; Pappa, G.L.; Loureiro, A.A. Roadside unit deployment for information dissemination in a VANET: An evolutionary approach. In Proceedings of the 14th Annual Conference Companion on Genetic and Evolutionary Computation, New York, NY, USA, 7–11 July 2012; pp. 27–34.
- Jalooli, A.; Song, M.; Xu, X. Delay efficient disconnected rsu placement algorithm for vanet safety applications. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6.
- Ahmed, Z.; Naz, S.; Ahmed, J. Minimizing transmission delays in vehicular ad hoc networks by optimized placement of road-side unit. Wirel. Netw. 2020, 26, 2905–2914.
- Yang, H.; Jia, Z.; Xie, G. Delay-bounded and cost-limited RSU deployment in urban vehicular ad hoc networks. Sensors 2018, 18, 2764.
- Ni, Y.; He, J.; Cai, L.; Pan, J.; Bo, Y. Joint roadside unit deployment and service task assignment for Internet of Vehicles (IoV). IEEE Internet Things J. 2018, 6, 3271–3283.
- Silva, C.M.; Pitangui, C.G.; Miguel, E.C.; Santos, L.A.; Torres, K.B. Gamma-Reload Deployment: Planning the communication infrastructure for serving streaming for connected vehicles. Veh. Commun. 2020, 21, 100197.
- Lochert, C.; Scheuermann, B.; Wewetzer, C.; Luebke, A.; Mauve, M. Data aggregation and roadside unit placement for a vanet traffic information system. In Proceedings of the 5th ACM International Workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 58–65.
- Chi, J.; Jo, Y.; Park, H.; Park, S. Intersection-priority based optimal RSU allocation for VANET. In Proceedings of the 2013 Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 350–355.
- Barrachina, J.; Garrido, P.; Fogue, M.; Martinez, F.J.; Cano, J.C.; Calafate, C.T.; Manzoni, P. Road side unit deployment: A density-based approach. IEEE Intell. Transp. Syst. Mag. 2013, 5, 30–39.
- Sankaranarayanan, M.; Chelliah, M.; Mathew, S. A Feasible RSU Deployment Planner Using Fusion Algorithm. Wirel. Pers. Commun. 2021, 116, 1849–1866.
- Tonguz, O.K.; Viriyasitavat, W. Cars as roadside units: A self-organizing network solution. IEEE Commun. Mag. 2013, 51, 112–120.
- Tonguz, O.K. Biologically inspired solutions to fundamental transportation problems. IEEE Commun. Mag. 2011, 49, 106–115.
- Reis, A.B.; Sargento, S.; Tonguz, O.K. Parked cars are excellent roadside units. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2490–2502.
- Reis, A.B.; Sargento, S. Leveraging parked cars as urban self-organizing road-side units. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–5.
- Jiang, X.; Du, D.H. Bus-vanet: A bus vehicular network integrated with traffic infrastructure. IEEE Intell. Transp. Syst. Mag. 2015, 7, 47–57.
- Kim, D.; Velasco, Y.; Wang, W.; Uma, R.; Hussain, R.; Lee, S. A new comprehensive RSU installation strategy for cost-efficient VANET deployment. IEEE Trans. Veh. Technol. 2016, 66, 4200–4211.
- Lee, J.; Ahn, S. Adaptive configuration of mobile roadside units for the cost-effective vehicular communication infrastructure. Wirel. Commun. Mob. Comput. 2019, 2019, 6594084.
- Heo, J.; Kang, B.; Yang, J.M.; Paek, J.; Bahk, S. Performance-cost trade-off of using mobile roadside units for V2X communication. IEEE Trans. Veh. Technol. 2019, 68, 9049–9059.
- Zaidi, S.; Atiquzzaman, M.; Calafate, C.T. Internet of flying things (IoFT): A survey. Comput. Commun. 2021, 165, 53–74.
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706.
- Raza, A.; Bukhari, S.H.R.; Aadil, F.; Iqbal, Z. An UAV-assisted VANET architecture for intelligent transportation system in smart cities. Int. J. Distrib. Sens. Networks 2021, 17.
- Oubbati, O.S.; Chaib, N.; Lakas, A.; Lorenz, P.; Rachedi, A. UAV-assisted supporting services connectivity in urban VANETs. IEEE Trans. Veh. Technol. 2019, 68, 3944–3951.