Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Ricardo Rüther | + 3183 word(s) | 3183 | 2022-03-16 07:12:34 | | | |
| 2 | Beatrix Zheng | + 10 word(s) | 3193 | 2022-03-25 03:15:58 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Rüther, R. Applications of Automatization Algorithms in Photovoltaic Power Plants. Encyclopedia. Available online: https://encyclopedia.pub/entry/21005 (accessed on 26 June 2026).
Rüther R. Applications of Automatization Algorithms in Photovoltaic Power Plants. Encyclopedia. Available at: https://encyclopedia.pub/entry/21005. Accessed June 26, 2026.
Rüther, Ricardo. "Applications of Automatization Algorithms in Photovoltaic Power Plants" Encyclopedia, https://encyclopedia.pub/entry/21005 (accessed June 26, 2026).
Rüther, R. (2022, March 24). Applications of Automatization Algorithms in Photovoltaic Power Plants. In Encyclopedia. https://encyclopedia.pub/entry/21005
Rüther, Ricardo. "Applications of Automatization Algorithms in Photovoltaic Power Plants." Encyclopedia. Web. 24 March, 2022.
Copy Citation
With the ever-increasing capacity and size of utility-scale photovoltaic (PV) power plants, reaching the scales of gigawatts and hundreds of hectares, automation is increasingly becoming a matter not only of scientific interest, but also of economic importance. Therefore, the autonomous procedure and classification of faults task must still be explored to enhance the accuracy and applicability of the aerial infrared thermography (aIRT) method.
aerial infrared thermography (aIRT)
PV power plant
PV monitoring
deep learning
automatic fault detection
PV reliability
1. Applications of Automatization Algorithms
1.1. Automatic Path Planning
In an automatic aerial infrared thermography (aIRT) mission, the unmanned aerial vehicle (UAV) flies over a set of waypoints that cover all modules of the photovoltaic (PV) plant. Therefore, an optimized path-planning algorithm aiming at an optimal path for time and battery efficiency is essential [1]. Figure 1 depicts the coverage area by a UAV based on the field of view (FoV) and resolution of the camera on board as well as the essential parameters used for path planning [1].
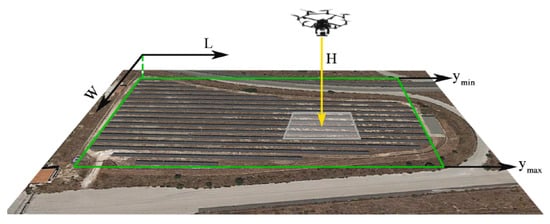
Figure 1. Path planning procedure of a PV power plant [1].
Available market software packages already provide an automatic flight based on a so-called “lawn mower” flight pattern. However, they do not always provide the most efficient flight and do not guarantee a centralized view to the PV arrays, especially in power plants installed over complex topography.
Studies aiming at optimizing path planning include different approaches to the problem. In the research developed by Salahat et al. [2], the traveling salesman shortest path algorithm was used to generate a path that includes a randomly selected set of modules that represent the entire PV plant, allowing an optimization of the battery use. Ding et al. [3] based their method on density clustering, boustrophedon path planning and Bezier curves. Luo et al. [4] also based their algorithm for path planning optimization on Bezier curves in a joint approach with particle swarm optimization (PSO), taking into consideration the flight attitude, gimbal limitation and path length.
Image stitching and DIP techniques were used by Henry et al. [5] to find contours of the power plant and generate a “lawn mower” path over it. A similar approach, using DL, was adopted by Moradi Sizkouhi et al. [1][6], which was also complemented with a dynamic path planning, which deviates the previous flight plan to take closer photos when faults are detected. Pérez-González et al. [7] also used DL to detect the area of the PV plant and then used different algorithms to determine the best flight path, wherein exact cellular decomposition boustrophedon and grid-based wavefront coverage algorithms produced the best results.
Other real-time algorithms have been proposed that calculate the optimized path of the UAV during the flight. In Roggi et al. [8], the UAV corrected the pre-planned “lawn mower” path according to the images that it acquired and the image processing techniques that are applied. A vision-based flight control was also proposed by Xi et al. [9], which performs a real-time direction and velocity correction.
1.2. Detection of PV Systems
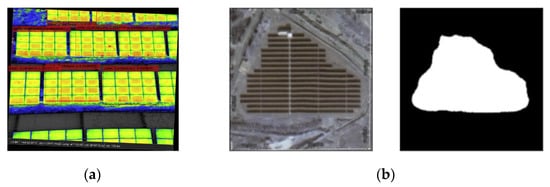
Although not always related to aerial inspections, the detection of PV systems in aerial imagery (UAV or satellite imagery) has been proposed by many authors and even used for path planning before the aIRT flight [6][7]. Table 1 presents a summary of methods used in the literature for detecting PV systems in aerial imagery. The table presents the best metrics obtained in each study, the type of image data used as input and the type of detection output obtained with each method. The detection output was classified into three categories:
- (a)Boxes: the output is given by the coordinates of a box or polygon placed around the PV system;
- (b)Mask: the output is a binary image where the pixels corresponding to the segment of the PV system are represented by the value 1 and the rest of the image is represented by 0;
- (c)Binary: for each image, the presence or absence of a PV system is the result of the algorithm (1 or 0).
Figure 2 shows two examples of two types of detections, by the coordinates of boxes around the detected PV panels (left) and masks of the segment of the PV system (right). Besides developing an algorithm for the detection of PV arrays, Wu et al. [10] also matched them to their string identifiers.
1.3. Detection of PV Modules
The detection of the area of the modules is an important step in the image processing task, which is required for both detecting modules with defects and locating them in the power plant.
Table 1. Summary of methods for detecting PV systems using aerial imagery.
| [Ref]/Year | Algorithm | Best Results | Output Type | Images |
|---|---|---|---|---|
| [12] 2016 | RF and DL | Pr: 90% | Mask | Aerial imagery |
| [10] 2017 | Feature description vector according to PV modules’ different colors | - | Boxes | UAV |
| [13] 2017 | Adaptive clustering method based on k- means | Loss rate is lower than 5% | Mask | Aerial imagery |
| [14] 2017 | GLCM algorithm | Pr: 93.16% | Mask | aIRT |
| F1: 77.8% | ||||
| [15] 2018 | DIP and k-means classifier | Pr > 99% | Boxes | Aerial imagery |
| [16] 2018 | DL (Segnet) | Pr: 90% | Mask | Aerial imagery |
| [17] 2018 | DL (PolyCNN) | IoU: 79.5% | Mask | Google Earth |
| [18] 2019 | DL (Faster R-CNN, based on the classifier ResNet-50) | Pr: 92.9% | Boxes | Google Earth |
| [19] 2019 | DL (Res-UNet) | Ac: 97.11% | Mask | System IRT images |
| [20] 2020 | DL (Mask R-CNN and VGG16) | Ac: 96.99% | Mask | UAV |
| [21] 2020 | DL (U-net) | F1: 82% | Mask | Google Earth |
| [22] 2020 | DL | F1: 92.2% | Binary | Satellite imagery |
| [23] 2020 | DL | Pr: 92.66% | Mask | Google Earth |
| Re: 97.43% | ||||
| [24] 2020 | DL (CNN for semantic segmentation) | Average error of 5.75% | Mask | UAV |
| [25] 2020 | k-means, SVM and CNN | MCC: 0.17 | Mask | Identify solar on rooftops |
| [11] 2020 | DIP (edge detection) and DL (R-CNN) | Pr: 92.25% | Mask | Panels in aIRT images |
| [26] 2021 | DL algorithms | F1: 95.38% | Mask | Aerial imagery |
| [27] 2021 | DIP (transform invariant low-rank textures (TILT) algorithm for orthographic view and Otsu’s method for segmentation) | - | Mask | Panels in aIRT images |
| [28] 2021 | Unsupervised segmentation parameter optimization (USPO) and RF classifier | F1: 98.7% | Mask | UAV |
| [7] 2021 | DL server | - | Mask | UAV |
| [1] 2022 | Mask R-CNN structure | Ac: 96.99% | Mask | UAV |
The first attempts to automatize the segmentation of the PV modules in IRT images appear to have been made in 2015, with images obtained with a moving cart, using simple DIP methods [29]. Other attempts were described in Menéndez et al. [30], Montanez et al. [31] and Wu et al. [32]. Uma et al. [33] did the same using a k-means clustering algorithm. In 2021, Xie et al. [34] used a Segnet, a CNN used for segmentation.
For aerial images, Tribak and Zaz [35], Salamanca et al. [36] and Perez et al. [37] published results on detecting PV modules in aerial visual images, and many studies used different techniques to detect and segment PV module boundaries in aIRT data. Table 2 shows the studies related to DIP and DL algorithms. In this case, the detection result of the algorithm can be given by a box or polygon around the PV module, a mask of the segment of the module or lines that mark the borders of the modules in a PV panel.
The best metric among the studies was obtained with a combination of many algorithms (DIP, SVM and DL) [38]. On the other hand, the worst metrics were obtained with simple DIP filters [39]. It is important to note that not all studies are comparable, because not all have presented metrics for their performance, and they have different dataset sizes, which make the comparison difficult. The studies described by Carletti et al. [40] and Bommes et al. [41], besides detecting the PV module, also developed ways to track the modules in subsequent frames of a video. A tracking system was also developed by Xie et al. [42] using an AlexNet CNN.
Table 2. Summary of methods for detecting PV modules in aIRT using DIP and DL algorithms.
| [Ref]/Year | Algorithm | Best Results | Output Type |
|---|---|---|---|
| [43] 2016 | DIP (normalization and thresholding) | F1: 92.76% | Boxes |
| [44] 2017 | DIP (edge extraction by Hough transform) | - | Boxes |
| [45] 2017 | DIP (thresholding) | Pr: 96.9% | Mask |
| [46] 2017 | RANSAC (random sample consensus) algorithm | - | Boxes |
| [47] 2017 | DIP (not detailed) | Pr: 82% | Boxes |
| [48] 2017 | DIP (thresholding in HSV color space) | - | Mask |
| [49] 2018 | DIP (template matching algorithm) | F1: 83.0% | Boxes |
| [40] 2020 | DIP (canny edge and morphological filters) | F1: 87% | Boxes |
| [39] 2020 | DIP (ACM LS and filtering by area, Hough transform) | Re: 70% | Boxes |
| [50] 2020 | DIP (thresholding in HSV color space and MSER algorithm) | Ac: 98% | Boxes |
| [51] 2020 | DL (YOLOv3) | F1: 95% | Boxes |
| [38] 2020 | DIP + support vector machine (SVM) and DL (Mask R-CNN) | F1: 98.9% | Boxes |
| [52] 2020 | DIP (Hough line detection, Sobel operator) | - | Lines |
| [53] 2020 | DIP (Sobel and canny operator, HoughPLine) | Pr: 90.91% | Lines |
| [54] 2020 | DIP (LSD algorithm and k-means clustering) | Pr: 77.3% | Mask |
| F1: 86.3% | |||
| [55] 2020 | DIP (k-means clustering and thresholding) | Ac: 98.46% | Mask |
| [41] 2021 | DL (Mask R-CNN) | Pr: 90.01% | Mask |
| F1: 90.51% | |||
| [56] 2022 | DIP (geometry coercion, clustering and angularity-based segment filtering) | - | Mask |
1.4. Orthomosaicking
The localization of faults within a power plant is a challenging issue that can be addressed by creating an orthomosaic of the PV power plant [57]. Image mosaicking, also known as image stitching, is a computational technique that detects overlapping key points in spatially subsequent photos and uses them to create a so-called panorama picture [48].
To improve the sight perspective and enable an expanded view of the localization of faults in both visual and thermal images of PV power plants, some researchers used commercially available software packages to create orthomaps with aerial imagery. Lee and Park [58] and Zefri et al. [59] used the software Pix4D capture to process thermal and visual images and create orthographic images with temperature information. Oliveira et al. [57] compared the use of two software packages (DroneDeploy and ContextCapture) to create an orthomosaic of a 1 MW PV power plant. Higuchi and Babasaki [60] used the software OpenDroneMap to generate the orthographic image of a 2 MW PV power plant.
Grimaccia et al. [48], Aghaei et al. [61] and Ismail et al. [62] have proposed methods for the orthomosaicking of visual images of PV power plants using DIP techniques. Tsanakas et al. [63] used the method of aerial triangulation, and Lafkih and Zaz [64] and Zefri [56][65] used the SIFT technique to perform the task. To optimize the mosaicking of visual PV images, Qi et al. [66] used a Faster R-CNN to detect key points in aerial sequence images in the world coordinate system, so it avoids redundant information generated by traditional methods. López-Fernández et al. [46] developed a tool that creates a 5D point cloud of the power plant, where each coordinate point has a temperature and an intensity value associated with it. After segmenting the modules in a dataset, Costa et al. [26] used a sliding window algorithm with overlapping pixels, combining frames side by side to reconstruct orthomosaics of power plants.
1.5. Soiling
A common cause of hot spots in PV power plants is soiling and shadow over the modules, which hinders the evaluation of results since they are not considered real defects of the PV modules [67]. Cipriani et al. [68] approached this issue by using a CNN to differentiate hot spots caused by faults from soiling, obtaining an accuracy of up to 98%.
Another solution to the problem is the analysis of the visual images that are normally taken together with the IRT images in the UAV, which enables the operator to discard hot spots caused by soiling. Automation of the task of detecting soiling in individual modules was proposed by Yang et al. [69], Pivem et al. [70] and Qasem et al. [71] using DIP techniques. Similar techniques were employed by Wen et al. [72], and by Karaköse and Firildak [73] to detect shadows over PV systems. Hanafy et al. [74] compared different ML algorithms (KNN, NN, RF and SVM) to classify modules in different categories of cleanliness and obtained an accuracy of over 90% using an SVM algorithm. Mehta et al. [75] proposed a method that uses a weakly supervised CNN-based classification network to predict power loss, detect soiling and categorize it given a PV module image. This method obtained an accuracy of about 87% on a test dataset of about 50 images.
1.6. Detection and Classification of Faults
The manual assessment of aIRT imagery is a time- and computing-consuming task; therefore, its automation is the most explored part of the aIRT framework in the literature. This detection can either be processed on board, during the UAV flight, as shown in the example in Figure 3, or in a computer software, after the acquisition of images has been carried out by the UAV (Figure 4). Both Figure 3 and Figure 4 show the procedure of the inspections for the two different approaches, including all tasks being automatized in each case.
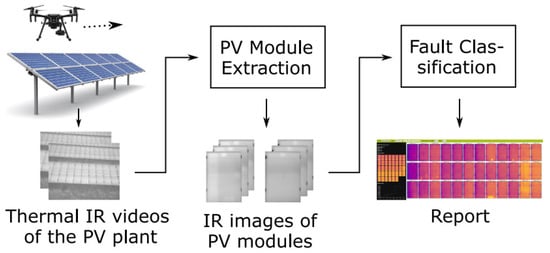
Figure 3. Overview of a tool for semi-automatic inspection of large-scale PV plants using IRT videos acquired by a UAV [41].
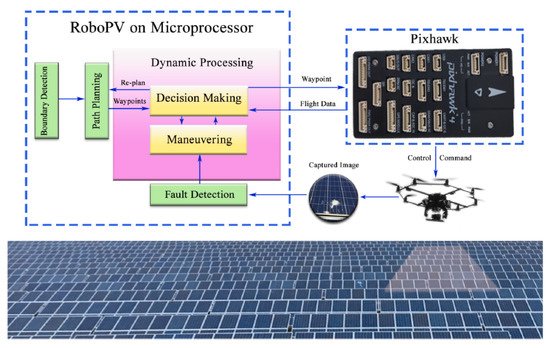
Figure 4. Overview of the on-board software package RoboPV, developed to perform the autonomous aerial monitoring of large-scale PV plants using UAVs [1].
In 2002, Pilla et al. [76] used the Sobel and canny edge operators to detect cracks in IRT PV cell images. In 2003, Wang et al. [77] used thresholding and a fuzzy classifier to detect faults in IRT images. After that, in 2011, Vergura and Falcone [78] used DIP techniques to analyze IRT images for faults. Since then, many other studies have used mostly DIP techniques to segment faults in IRT images.
1.7. Other Applications
Imaging techniques have been employed in some other applications to facilitate the analysis of PV modules. An example is the detection of blurred images that was addressed by Tribak and Zaz [79] with image processing techniques in order to filter frames of videos before employing mosaicking techniques. Similar techniques were used by Shen et al. [80] to correct the angle distortion of IRT images.
2. Current Insights
This research has shown that different automatization algorithms, including DIP, DL and classification techniques, have been employed for automating different tasks of the aIRT procedure for inspecting PV power plants. Among the conclusions, this research showed that only a few among the selected studies have assessed two important aspects of the autonomous inspection procedure, namely, the optimization of the flight path (nine papers), and the detection of soiling (eight papers). These two topics are of great importance to increase time efficiency in aIRT and therefore should be further investigated. The latter goal of detecting soiling over PV modules and differentiating it from actual faults of the modules was investigated by some authors, e.g., Dunderdale et al. [81] and Arosh et al. [82], together with the detection and classification of other faults.
For the task of performing the orthomosaicking of aIRT images to facilitate the localization of the faults in the field, four papers employed existing software to perform the task, while ten studies approached the development of algorithms to create the orthomosaic of the PV plant. However, most of the proposed methods are based on DIP techniques; therefore, the resulting mosaic consists of a simple image, without additional GPS information. The correlation of orthomosaic images with GPS coordinates and the identification of modules and strings according to the site nomenclature are areas that require further investigation.
Another approach to the challenge was developed by Wu et al. [10], with the development of an algorithm that detects PV arrays in power plants and performs the automatic correlation with their string identifiers. This is a promising strategy that could also be used to facilitate the localization of detected faults in the field through aIRT. Besides the study carried out by Wu et al. [10], another 20 studies among the selected literature focused on the development of algorithms to detect PV systems and panels in aerial imagery. However, only three of these studies focused on aerial IRT images of the PV plants, obtaining up to 93.16% precision in the results [14]. On the one hand, 18 papers presented the results of developed algorithms for the detection of individual PV modules in aIRT images, of which three of them applied DL techniques. Although the methods are hardly comparable given their different structures for results (i.e., mask, box or line), their different dataset sizes and the different evaluation metrics used, a method that combined many algorithms (DIP, SVM and DL) for detecting PV modules in aIRT images and obtained an F1 score of 98.4% can be highlighted [38]. On the other hand, the worst metrics were obtained with simple DIP filters [39], which although providing fast results with small datasets required for training, are characterized by a lack in generalization. This is important for the replication of the algorithm in images acquired in different conditions and with a different quality. The algorithms proposed by Carletti et al. [40], Xie et al. [42] and Bommes et al. [41] also performed the tracking of the modules in subsequent frames of an aIRT video. This task is of utter importance for the cross-correlation of detected modules and faults, as well as their location in PV plants.
Most of the selected studies have assessed autonomous fault detection and classification in PV plants through visual (12 papers), IRT (22 papers) and aIRT images (43 papers). Among these studies, 35% used DL techniques for the detection or classification of PV faults, with an increase in developed algorithms using CNNs in recent years. Still, DIP-based algorithms also presented high accuracy results, even though most of them use smaller datasets, and therefore their replication in other sets of data is possibly not feasible. The combination of DL or DIP techniques with classifier algorithms was a promising approach in recent studies. In the field, fault detection can either be processed on board, during the UAV flight, or subsequently through a post-processing procedure after the flight. For the first case, the high computational requirements and the processing time of DL are still a challenge, as even in high-performing computers, the processing of a set of images of a large-scale PV power plant (that consists of some gigabytes of data) can take hours when using a DL algorithm. In the same way as in the detection of PV systems and modules, many types of outputs for the algorithms are possible, namely the segmentation of the faults, the detection of damaged modules or even the classification of faults in separate classes. The classes also differ among authors, and these differences represent a great challenge not only for the comparison between studies, but also for the exchange of data, experiences and algorithms among researchers in PV community, which hinders the advancements in this area. The exchange of data to enable the development of larger and more generalized datasets that consider different environmental conditions is also deaccelerated by data protection clauses.
Besides the different result types, the different evaluation metrics (or the lack of them), dataset sizes and image resolutions of the inputs also make the comparison between studies difficult. However, in general, the algorithms with the highest metrics are the ones dedicated to detecting and classifying a few types of faults compared to those that carry out the classification of many classes of faults. This proves that detection and classification of multiple faults is a complex task and further investigation is required. On this subject, the algorithm developed by Bommes et al. [41] can be highlighted for its encouraging results, with an accuracy of 90% in the detection and classification of faults in ten different anomaly types. In summary, to achieve the goal of an entirely autonomous aIRT procedure, advances in some of the tasks related to the technique must be achieved. Even tasks that were already the focus of many research studies, such as the detection and classification of faults, should be further explored to contemplate different types of datasets and conditions. The exchange of data and academic collaborations are fundamental to allow for a fully automatic procedure that not only detects modules and faults on PV modules but also provides information about the type and location of the faults, in a simple and accessible manner, to enable quick remediation measures.
References
- Sizkouhi, A.M.M.; Esmailifar, S.M.; Aghaei, M.; Karimkhani, M. RoboPV: An integrated software package for autonomous aerial monitoring of large scale PV plants. Energy Convers. Manag. 2022, 254, 115217.
- Salahat, E.; Asselineau, C.-A.; Coventry, J.; Mahony, R. Waypoint Planning for Autonomous Aerial Inspection of Large-Scale Solar Farms. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 2019, pp. 763–769.
- Ding, Y.; Cao, R.; Liang, S.; Qi, F.; Yang, Q.; Yan, W. Density-Based Optimal UAV Path Planning for Photovoltaic Farm Inspection in Complex Topography. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 3931–3936.
- Luo, X.; Li, X.; Yang, Q.; Wu, F.; Zhang, D.; Yan, W.; Xi, Z. Optimal path planning for UAV based inspection system of large-scale photovoltaic farm. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 4495–4500.
- Henry, C.; Poudel, S.; Lee, S.-W.; Jeong, H. Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera. Appl. Sci. 2020, 10, 3802.
- Moradi Sizkouhi, A.M.; Majid Esmailifar, S.; Aghaei, M.; de Oliveira, A.K.V.; Rüther, R. Autonomous Path Planning by Unmanned Aerial Vehicle (UAV) for Precise Monitoring of Large-Scale PV plants. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019; Volume 2, pp. 1398–1402.
- Pérez-González, A.É.; Benítez-Montoya, N.; Jaramillo-Duque, Á.; Cano-Quintero, J.B. Coverage path planning with semantic segmentation for UAV in PV plants. Appl. Sci. 2021, 11, 12093.
- Roggi, G.; Niccolai, A.; Grimaccia, F.; Lovera, M. A Computer Vision Line-Tracking Algorithm for Automatic UAV Photovoltaic Plants Monitoring Applications. Energies 2020, 13, 838.
- Xi, Z.; Lou, Z.; Sun, Y.; Li, X.; Yang, Q.; Yan, W. A Vision-Based Inspection Strategy for Large-Scale Photovoltaic Farms Using an Autonomous UAV. In Proceedings of the 2018 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuxi, China, 19–23 October 2018; pp. 200–203.
- Wu, F.; Zhang, D.; Li, X.; Luo, X.; Wang, J.; Yan, W.; Chen, Z.; Yang, Q. Aerial image recognition and matching for inspection of large-scale photovoltaic farms. In Proceedings of the 2017 International Smart Cities Conference (ISC2), Wuxi, China, 14–17 September 2017; pp. 1–6.
- Huerta Herraiz, Á.; Pliego Marugán, A.; García Márquez, F.P. Photovoltaic plant condition monitoring using thermal images analysis by convolutional neural network-based structure. Renew. Energy 2020, 153, 334–348.
- Malof, J.M.; Bradbury, K.; Collins, L.M.; Newell, R.G. A Deep Convolutional Neural Network and a Random Forest Classifier for Solar Photovoltaic Array Detection in Aerial Imagery. Int. Conf. Renew. Energy Res. Appl. 2016, 5, 650–654.
- Zhang, D.; Wu, F.; Li, X.; Luo, X.; Wang, J.; Yan, W.; Chen, Z.; Yang, Q. Aerial image analysis based on improved adaptive clustering for photovoltaic module inspection. In Proceedings of the 2017 International Smart Cities Conference (ISC2), Wuxi, China, 14–17 September 2017; pp. 1–6.
- Shen, H.; Zhu, L.; Hong, X.; Chang, W. ROI extraction method of infrared thermal image based on GLCM characteristic imitate gradient. In Computer Vision, Proceedings of the CCF Chinese Conference on Computer Vision, Tianjin, China, 11–14 October 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 771, ISBN 9789811072987.
- Wang, M.; Cui, Q.Q.; Sun, Y.; Wang, Q. Photovoltaic panel extraction from very high-resolution aerial imagery using region–line primitive association analysis and template matching. ISPRS J. Photogramm. Remote Sens. 2018, 141, 100–111.
- Camilo, J.; Wang, R.; Collins, L.M.; Bradbury, K.; Malof, J.M. Application of a semantic segmentation convolutional neural network for accurate automatic detection and mapping of solar photovoltaic arrays in aerial imagery. In Proceedings of the 2017 IEEE Applied Imagery Pattern Recognition (AIPR) Workshop, Washington, DC, USA, 10–12 October 2017.
- Girard, N.; Tarabalka, Y. End-to-end learning of polygons for remote sensing image classification. Int. Geosci. Remote Sens. Symp. 2018, 2018, 2083–2086.
- Golovko, V.; Kroshchanka, A.; Bezobrazov, S.; Sachenko, A.; Komar, M.; Novosad, O. Development of Solar Panels Detector. In Proceedings of the 2018 International Scientific-Practical Conference on Problems of Infocommunications Science and Technology, PIC S and T 2018-Proceedings, Kharkiv, Ukraine, 9–12 October 2019; pp. 761–764.
- Zhang, H.; Hong, X.; Zhou, S.; Wang, Q. Infrared image segmentation for photovoltaic panels based on res-unet. In Pattern Recognition and Computer Vision, Proceedings of the Chinese Conference on Pattern Recognition and Computer Vision (PRCV), Xi’an, China, 8–11 November 2019; LNCS; World Scientific: Singapore, 2019; Volume 11857, pp. 611–622.
- Sizkouhi, A.M.M.; Aghaei, M.; Esmailifar, S.M.; Mohammadi, M.R.; Grimaccia, F. Automatic Boundary Extraction of Large-Scale Photovoltaic Plants Using a Fully Convolutional Network on Aerial Imagery. IEEE J. Photovolt. 2020, 10, 1061–1067.
- Zech, M.; Ranalli, J. Predicting PV Areas in Aerial Images with Deep Learning. In Proceedings of the 2020 47th IEEE Photovoltaic Specialists Conference (PVSC), Calgary, AB, Canada, 15 June–21 August 2020; pp. 0767–0774.
- Moraguez, M.; Trujillo, A.; De Weck, O.; Siddiqi, A. Convolutional Neural Network for Detection of Residential Photovoltalc Systems in Satellite Imagery. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium 2020, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1600–1603.
- Mayer, K.; Wang, Z.; Arlt, M.L.; Neumann, D.; Rajagopal, R. DeepSolar for Germany: A deep learning framework for PV system mapping from aerial imagery. In Proceedings of the 2020 International Conference on Smart Energy Systems and Technologies (SEST), Istanbul, Turkey, 7–9 September 2020.
- Rico Espinosa, A.; Bressan, M.; Giraldo, L.F. Failure signature classification in solar photovoltaic plants using RGB images and convolutional neural networks. Renew. Energy 2020, 162, 249–256.
- Li, Q.; Feng, Y.; Leng, Y.; Chen, D. SolarFinder: Automatic detection of solar photovoltaic arrays. In Proceedings of the 2020 19th ACM/IEEE International Conference on Information Processing in Sensor Networks, IPSN 2020, Sydney, NSW, Australia, 21–24 April 2020; pp. 193–204.
- da Costa, M.V.C.V.; de Carvalho, O.L.F.; Orlandi, A.G.; Hirata, I.; de Albuquerque, A.O.; e Silva, F.V.; Guimarães, R.F.; Gomes, R.A.T.; de Carvalho Júnior, O.A. Remote sensing for monitoring photovoltaic solar plants in brazil using deep semantic segmentation. Energies 2021, 14, 2960.
- Wang, Q.; Paynabar, K.; Pacella, M. Online automatic anomaly detection for photovoltaic systems using thermography imaging and low rank matrix decomposition. J. Qual. Technol. 2021, 1–14.
- Souffer, I.; Sghiouar, M.; Sebari, I.; Zefri, Y.; Hajji, H.; Aniba, G. Automatic Extraction of Photovoltaic Panels from UAV Imagery with Object-Based Image Analysis and Machine Learning. In WITS 2020; Lecture Notes in Electrical Engineering; Bennani, S., Lakhrissi, Y., Khaissidi, G., Mansouri, A., Khamlichi, Y., Eds.; Springer: Singapore, 2021; ISBN 978-981-33-6893-4.
- Gao, X.; Munson, E.; Abousleman, G.P.; Si, J. Automatic solar panel recognition and defect detection using infrared imaging. Autom. Target Recognit. XXV 2015, 9476, 196–204.
- Menéndez, O.; Guamán, R.; Pérez, M.; Cheein, F.A. Photovoltaic modules diagnosis using artificial vision techniques for artifact minimization. Energies 2018, 11, 1688.
- Montanez, L.E.; Valentin-Coronado, L.M.; Moctezuma, D.; Flores, G. Photovoltaic module segmentation and thermal analysis tool from thermal images. In Proceedings of the 2020 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 4–6 November 2020.
- Wu, J.; Chan, E.; Yadav, R.; Gopalakrishna, H.; Tamizhmani, G.; Yadav, R.; Chan, E.; Wu, J.; Tamizhmani, G. Durability evaluation of PV modules using image processing tools. In Proceedings of the SPIE—The International Society for Optical Engineering, San Diego, CA, USA, 17 September 2018; Volume 10759, p. 36.
- Uma, J.; Muniraj, C.; Sathya, N. Diagnosis of Photovoltaic (PV) Panel Defects Based on Testing and Evaluation of Thermal Image. J. Test. Eval. 2019, 47, 20170653.
- Xie, Y.; Shen, Y.Y.; Zhang, K.; Zhang, J. Efficient Region Segmentation of PV Module in Infrared Imagery using Segnet. IOP Conf. Ser. Earth Environ. Sci. 2021, 793, 012018.
- Tribak, H.; Zaz, Y. Remote solar panels identification based on patterns localization. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018; pp. 1–5.
- Salamanca, S.; Merchan, P.; Garcia, I. On the detection of solar panels by image processing techniques. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation, MED 2017, Valletta, Malta, 3–6 July 2017; pp. 478–483.
- Perez, R.M.; Arias, J.S.; Mendez-Porras, A. Solar panels recognition based on machine learning. In Proceedings of the 2019 IV Jornadas Costarricenses de Investigación en Computación e Informática (JoCICI), San Pedro, Costa Rica, 19–20 August 2019; pp. 1–5.
- Díaz, J.J.V.; Vlaminck, M.; Lefkaditis, D.; Vargas, S.A.O.; Luong, H. Solar panel detection within complex backgrounds using thermal images acquired by uavs. Sensors 2020, 20, 6219.
- Alfaro-Mejía, E.; Loaiza-Correa, H.; Franco-Mejía, E.; Hernández-Callejo, L. Segmentation of Thermography Image of Solar Cells and Panels. Commun. Comput. Inf. Sci. 2020, 1152, 1–8.
- Carletti, V.; Greco, A.; Saggese, A.; Vento, M. An intelligent flying system for automatic detection of faults in photovoltaic plants. J. Ambient Intell. Humaniz. Comput. 2020, 11, 2027–2040.
- Bommes, L.; Pickel, T.; Buerhop-Lutz, C.; Hauch, J.; Brabec, C.; Peters, I.M. Computer vision tool for detection, mapping, and fault classification of photovoltaics modules in aerial IR videos. Prog. Photovolt. Res. Appl. 2021, 29, 1236–1251.
- Xie, X.; Wei, X.; Wang, X.; Guo, X.; Li, J.; Cheng, Z. Abnormal target tracking and localization algorithm for UAV PV inspection scenarios. IOP Conf. Ser. Mater. Sci. Eng. 2020, 768, 072068.
- Dotenco, S.; Dalsass, M.; Winkler, L.; Wurzner, T.; Brabec, C.; Maier, A.; Gallwitz, F.; Würzner, T.; Brabec, C.; Maier, A.; et al. Automatic detection and analysis of photovoltaic modules in aerial infrared imagery. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision, WACV 2016, Lake Placid, NY, USA, 7–10 March 2016; pp. 1–9.
- Arenella, A.; Greco, A.; Saggese, A.; Vento, M. Real time fault detection in photovoltaic cells by cameras on drones. In ICIAR 2017: Image Analysis and Recognition, Proceedings of the International Conference Image Analysis and Recognition, Montreal, QC, Canada, 5–7 July 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10317, ISBN 9783319598758.
- Kim, D.; Youn, J.; Kim, C. Automatic Faults Recognition of Photovoltaic Modules Based on Statistical Analysis of UAV Thermography. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 179–182.
- López-Fernández, L.; Lagüela, S.; Fernández, J.; González-Aguilera, D. Automatic evaluation of photovoltaic power stations from high-density RGB-T 3D point clouds. Remote Sens. 2017, 9, 631.
- Muhammad, B.; Prasad, R.; Nisi, M.; Mennella, A.; Gagliarde, G.; Cianca, E.; Marenchino, D.; Angrisano, A.; Bernardi, M.; Addabbo, P.; et al. Automating the maintenance of photovoltaic p/ower plants. In Proceedings of the 2017 Global Wireless Summit (GWS), Cape Town, South Africa, 15–18 October 2017; pp. 6–11.
- Grimaccia, F.; Leva, S.; Niccolai, A. PV plant digital mapping for modules’ defects detection by unmanned aerial vehicles. IET Renew. Power Gener. 2017, 11, 1221–1228.
- Addabbo, P.; Angrisano, A.; Bernardi, M.L.; Gagliarde, G.; Mennella, A.; Nisi, M.; Ullo, S.L. UAV system for photovoltaic plant inspection. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 58–67.
- Jeong, H.; Kwon, G.-R.; Lee, S.-W. Deterioration Diagnosis of Solar Module Using Thermal and Visible Image Processing. Energies 2020, 13, 2856.
- Greco, A.; Pironti, C.; Saggese, A.; Vento, M.; Vigilante, V. A deep learning based approach for detecting panels in photovoltaic plants. In Proceedings of the 3rd International Conference on Applications of Intelligent Systems, Las Palmas de Gran Canaria, Spain, 7–12 January 2020; ACM: New York, NY, USA, 2020; pp. 1–7.
- Nie, J.; Luo, T.; Li, H. Automatic hotspots detection based on UAV infrared images for large-scale PV plant. Electron. Lett. 2020, 56, 993–995.
- Xie, X.; Wei, X.; Wang, X.; Guo, X.; Li, J.; Cheng, Z. Photovoltaic panel anomaly detection system based on Unmanned Aerial Vehicle platform. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Chennai, India, 16–17 September 2020; Volume 768.
- Wang, N.; Sun, Z.-L.; Zeng, Z.; Lam, K.-M. Effective Segmentation Approach for Solar Photovoltaic Panels in Uneven Illuminated Color Infrared Images. IEEE J. Photovolt. 2021, 11, 478–484.
- Fernández, A.; Usamentiaga, R.; de Arquer, P.; Fernández, M.Á.; Fernández, D.; Carús, J.L.; Fernández, M. Robust detection, classification and localization of defects in large photovoltaic plants based on unmanned aerial vehicles and infrared thermography. Appl. Sci. 2020, 10, 5948.
- Zefri, Y.; Sebari, I.; Hajji, H.; Aniba, G. Developing a deep learning-based layer-3 solution for thermal infrared large-scale photovoltaic module inspection from orthorectified big UAV imagery data. Int. J. Appl. Earth Obs. Geoinf. 2022, 106, 102652.
- De Oliveira, A.K.V.; Bracht, M.K.; Melo, A.P.; Lamberts, R.; Rüther, R.; Ruther, R. Evaluation of Faults in a Photovoltaic Power Plant using Orthomosaics based on Aerial Infrared Thermography. In Proceedings of the 2021 IEEE 48th Photovoltaic Specialists Conference (PVSC), Fort Lauderdale, FL, USA, 20–25 June 2021; pp. 2604–2610.
- Lee, D.H.; Park, J.H. Developing inspection methodology of solar energy plants by thermal infrared sensor on board unmanned aerial vehicles. Energies 2019, 12, 2928.
- Zefri, Y.; Elkettani, A.; Sebari, I.; Lamallam, S.A. Thermal Infrared and Visual Inspection of Photovoltaic Installations by UAV Photogrammetry—Application Case: Morocco. Drones 2018, 2, 41.
- Higuchi, Y.; Babasaki, T. Failure detection of solar panels using thermographic images captured by drone. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018; Volume 5, pp. 391–396.
- Aghaei, M.; Leva, S.; Grimaccia, F. PV power plant inspection by image mosaicing techniques for IR real-time images. In Proceedings of the 2017 IEEE 44th Photovoltaic Specialist Conference (PVSC), Washington, DC, USA, 25–30 June 2017; pp. 3462–3467.
- Ismail, H.; Rahmani, A.; Aljasmi, N.; Quadir, J. Stitching approach for PV panel detection. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences, ASET 2020, Dubai, United Arab Emirates, 4 February–9 April 2020; pp. 29–32.
- Tsanakas, J.A.; Ha, L.D.; Al Shakarchi, F. Advanced inspection of photovoltaic installations by aerial triangulation and terrestrial georeferencing of thermal/visual imagery. Renew. Energy 2017, 102, 224–233.
- Lafkih, S.; Zaz, Y. Solar panel monitoring using a video frames mosaicing. In Proceedings of the 2016 International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 14–17 November 2016; pp. 247–250.
- Zefri, Y.; Sebari, I.; Hajji, H.; Aniba, G. In-depth investigation of applied digital photogrammetry to imagery-based RGB and thermal infrared aerial inspection of large-scale photovoltaic installations. Remote Sens. Appl. Soc. Environ. 2021, 23, 100576.
- Qi, F.; Liang, S.; Cao, R.; Ding, Y.; Yang, Q.; Yan, W. Detection and Positioning of Keypoints in Small-scale Photovoltaic System Based on Object Detection Network and Aerial Sequence Images. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4795–4800.
- de Oliveira, A.K.V.; Aghaei, M.; Rüther, R. Aerial infrared thermography for low-cost and fast fault detection in utility-scale PV power plants. Sol. Energy 2020, 211, 712–724.
- Cipriani, G.; D’Amico, A.; Guarino, S.; Manno, D.; Traverso, M.; Di Dio, V. Convolutional neural network for dust and hotspot classification in PV modules. Energies 2020, 13, 6357.
- Yang, M.; Ji, J.; Guo, B. Soiling Quantification Using an Image-Based Method: Effects of Imaging Conditions. IEEE J. Photovolt. 2020, 10, 1780–1787.
- Pivem, T.; de Oliveira de Araujo, F.; de Oliveira de Araujo, L.; de Oliveira, G.S. Application of A Computer Vision Method for Soiling Recognition in Photovoltaic Modules for Autonomous Cleaning Robots. Signal Image Process. Int. J. 2019, 10, 43–59.
- Qasem, H.; Mnatsakanyan, A.; Banda, P. Assessing dust on PV modules using image processing techniques. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, Portland, OR, USA, 5–10 June 2016; Volume 2016, pp. 2066–2070.
- Wen, W.; Li, S.; Zhou, F.; Li, M.; Xie, Q.Q.; Chen, S. Stain detection method of solar panel based on spot elimination. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–38 March 2021; pp. 820–824.
- Karaköse, M.; Firildak, K. A shadow detection approach based on fuzzy logic using images obtained from PV array. In Proceedings of the 6th International Conference on Modeling, Simulation, and Applied Optimization, ICMSAO 2015-Dedicated to the Memory of Late Ibrahim El-Sadek, Istanbul, Turkey, 27–29 May 2015.
- Hanafy, W.A.; Pina, A.; Salem, S.A. Machine learning approach for photovoltaic panels cleanliness detection. In Proceedings of the ICENCO 2019—2019 15th International Computer Engineering Conference: Utilizing Machine Intelligence for a Better World, Giza, Egypt, 29–30 December 2019; pp. 72–77.
- Mehta, S.; Azad, A.P.; Chemmengath, S.A.; Raykar, V.; Kalyanraman, S. DeepSolarEye: Power Loss Prediction and Weakly Supervised Soiling Localization via Fully Convolutional Networks for Solar Panels. In Proceedings of the WACV 2018, Lake Tahoe, NV, USA, 12–15 March 2018.
- Pilla, M.; Galmiche, F.; Maldague, X. Thermographic inspection of cracked solar cells. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 15 March 2002; Volume 4710, pp. 699–703.
- Wang, P.; Yang, W.; Shen, Y.; Zhou, L. The Fault Diagnosis for Photovoltaic Array with the Technique of Infrared/Visible Image Fusion. In Proceedings of the SPIE—The International Society for Optical Engineering, Beijing, China, 25 September 2003; Volume 5286, pp. 658–661.
- Vergura, S.; Falcone, O. Filtering and processing IR images of PV modules. Renew. Energy Power Qual. J. 2011, 1, 1209–1214.
- Tribak, H.; Zaz, Y. Solar Panels Frames Quality Assessment. In Proceedings of the 2017 International Renewable and Sustainable Energy Conference (IRSEC), Tangier, Morocco, 4–7 December 2017.
- Shen, Y.Y.; Chen, X.; Zhang, J.; Xie, L.; Zhang, K.; Wei, H. A Robust Automatic Method for Removing Projective Distortion of Photovoltaic Modules from Close Shot Images. In PRCV 2020: Pattern Recognition and Computer Vision, Prodeedings of the Chinese Conference on Pattern Recognition and Computer Vision (PRCV), Nanjing, China, 16–18 October 2020; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12305, ISBN 9783030606329.
- Dunderdale, C.; Brettenny, W.; Clohessy, C.; van Dyk, E.E.; Dyk, E.E. Photovoltaic defect classification through thermal infrared imaging using a machine learning approach. Prog. Photovolt. Res. Appl. 2020, 28, 177–188.
- Arosh, S.; Ghosh, K.; Prakash, S.; Duttagupta, S.P. Development of Robust Algorithm for Autonomous System Health Monitoring of Ultra Large Scale Based Solar Farm. In Proceedings of the 33rd European Photovoltaic Solar Energy Conference and Exhibition, Amsterdam, The Netherlands, 25–29 September 2017; pp. 2413–2417.
More
Information
Subjects:
Energy & Fuels
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
964
Revisions:
2 times
(View History)
Update Date:
25 Mar 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No