Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Agoston Restas | + 1785 word(s) | 1785 | 2022-01-10 07:30:27 |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Restas, A. Drone Applications Fighting COVID-19. Encyclopedia. Available online: https://encyclopedia.pub/entry/18168 (accessed on 24 July 2026).
Restas A. Drone Applications Fighting COVID-19. Encyclopedia. Available at: https://encyclopedia.pub/entry/18168. Accessed July 24, 2026.
Restas, Agoston. "Drone Applications Fighting COVID-19" Encyclopedia, https://encyclopedia.pub/entry/18168 (accessed July 24, 2026).
Restas, A. (2022, January 12). Drone Applications Fighting COVID-19. In Encyclopedia. https://encyclopedia.pub/entry/18168
Restas, Agoston. "Drone Applications Fighting COVID-19." Encyclopedia. Web. 12 January, 2022.
Copy Citation
The non-military use of drones is becoming more widespread, which the media is now increasingly reporting. Drone applications fighting Covid-19 can be divided into different types of groups: surveillance of an area with a visual camera, detection of fever-infected people with a thermal camera, communication with an on-board installed loudspeaker or QR code flag and three different logistic tasks such as transportation of essentials, health products and disinfectants.
drone
COVID-19
aerial surveillance
logistic
1. General Characteristics of Area Monitoring or Aerial Surveillance
Area monitoring or aerial surveillance is the most frequently used drone application, both in the case of normal everyday practice and special activity in combating COVID-19. In all countries where drone applications were reported, area monitoring or aerial surveillance was used. Several aspects must be taken into account when visually observing a given area: the size of the given area, its topographic conditions, openness, built-up ratio, the points of special importance within the area, the approach points of the area and the duration of the observation. In cases of smaller or transparent open areas, point monitoring may be sufficient; in cases of larger areas, the use of several drones organized in a network is required, while in cases of part-time surveillance, it is necessary to patrol with one drone. In the latter case, the flight path can be influenced by the flight altitude, as it increases the visible area so the flight time or flight path can be shortened. In this case, other conditions such as the edge of the area remain unchanged. The situation is the same if the flight altitude remains but the camera-viewing angle increases.[1] A shortened flight path means that it moves towards the center of the area to be observed as shown in Figure 1.
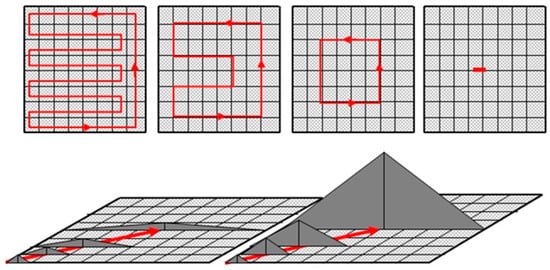
Figure 1. If camera view angle increases or flight altitude is higher flight path moves to the center of the observed area. In this case, other conditions such as the edge of the area remain unchanged. Source: author.
In the observation of the individual points (pixels) at the same time, or the ratio of the duration of the observations and the non-observations, its incorporation rate and nature have significant influence. In natural areas, we use the topography and vegetation; within a built environment, the buildings, characteristics of parks and density are factors interfering with visibility. An increase in the density of distractions requires an increase in the frequency of flights. The frequency of monitoring key points can typically be higher than the average, depending on demand, also affecting route planning. In this case, several optimization methods can be considered, e.g., the traveling salesman problem [2][3][4] or the issue of multi-aspect efficiency [5][6][7].
The visual camera used on board should be carefully selected so that they can provide the highest possible resolution. High resolution can help managers identify more distant points more easily, choosing a higher flight altitude and a shorter flight path if necessary. The purpose of flights is rather focused on detecting unwanted phenomena, e.g., compliance with the rules of exit restrictions or to detect illegal personal presence and actions. For the latter, the maintenance of public safety during restrictive measures, the prevention of possible crimes, early detection and exploration may also be involved. Exit restrictions may be partial when, for example, commuting to work, health care, shopping, sports are allowed or complete when a curfew has been ordered. Area monitoring provides an opportunity to confirm the effectiveness of the measures ordered, to impose necessary further tightening, or even to resolve previous tightening.
2. General Characteristics of Detecting Febrile Patient
A special application of area surveillance can be achieved by supplementing or replacing the on-board visual camera with a thermal imager. Body temperature control has been a common practice in the past, even when SARS, EVD and MERS viruses have spread, especially at traffic junctions such as metro crossings, airports, and when crossing state borders [8][9][10].
The logic of the flight principles used in area monitoring can be applied in this case as well; however, it should be noted that, here, the purpose of flight is not to observe and control a larger area, but specifically to screen out patients with febrile symptoms. The size of the observed area is then more limited, mostly open public spaces, streets, markets, parks, public transport stations and stops. In such cases, the restrictions are yet moderate; a significant number of people stay in the community areas, for whom the goal is to screen out people with febrile symptoms in order to reduce further spread of the infection. In addition to the resolution of thermal cameras, the ability to adjust the temperature value is also an important factor.
3. General Characteristics of Using Loudspeaker on Board
The use of a loudspeaker should take into account loudspeaker performance and distortion, the quality of speech transmission, the pitch and speech segmentation used and the distance between the flight position of the drone and the person or group to be informed. In the latter case, we have to assume the need for drone–human (group) interaction, which can provide a basis for determining the maximum distance. The minimum distance of the drone–human interaction may be the boundary of the public zone area (>3.6 m) [11]. However, the existence of drone–human (group) interaction should not violate the intimate zone of the person (group), which in some people is approx. 0.5 m; in the case of groups, this depends on group size and may increase. However, crossing the public zone belonging to individual people is already clearly a matter of flight safety; maintaining a minimum safe distance of 5 m is definitely justified. At greater drone-to-human distances, it can be assumed that the reception of information of the target person is informative; at shorter distances, it is a warning, while in the vicinity of the open zone, it is already threatening. The activity of a drone that is suddenly or spectacularly maneuvering nearby and communicating immediately, possibly using excessive volume, may be intended to be a warning, but may be considered rather threatening. Different altitude also has an added message as shown in Figure 2.
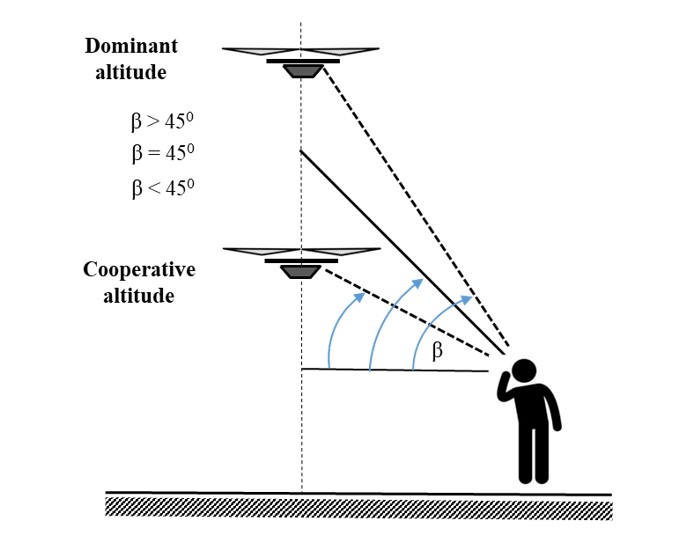
Figure 2. Changing the altitude drone sends an added communication message to the people. Lower altitude (camera view angle is less than about 45°): the added message cooperation between the drone and the people. Higher altitude (camera view angle is more than about 45°): the added message means drone dominance.
4. General Characteristics of Delivery Essentials Goods
Today, drones are increasingly used not only for data collection, but also for various logistic tasks. The ability of drones is still limited in terms of both transport distance and transportable weight; however, up to a few 10 kms and a few kilograms of weight, they may even be competitive compared to other means of transport [12]. However, this limited capacity is considered very useful in some special cases, such as when, for example, during quarantine, purchasing opportunities are limited.
The general characteristics of this application are to choose the flight altitude and speed following the safety rules of long-range flight, preferably avoiding populated areas or minimizing this as appropriate. The choice of take-off and landing location is also an important issue; in both cases, it is absolutely justified to keep unauthorized persons away.
To measure the effectiveness or to find the advantages of this service is very simple: the total or relative price of the delivery must be cheaper than the traditional service [13][14]. There are many other advantages of the drone delivery. It is flexible, environmentally friendly and can avoid traffic jams. Even if this service is growing exponentially today, its capacity is still not ready to supply the whole population with essential needs.
5. General Characteristics of Supporting Medical Services
The basis of this application is a point-to-point delivery, it is a simple logistics task, but its implementation conditions are quite special, which gives the task its uniqueness. The uniqueness of the take-off and landing sites is always significant in this application. The base is always the same despite the one endpoint that can be considered. This can be a hospital or other health center that can be connected to the health service, e.g., a sampling or collection station. The other endpoint, on the other hand, can always be considered variable; in the case of a more advanced application, it is practically an area close to the place of residence of the inspected person.
The choice of flight altitude and speed in this case should follow the flight safety rules of long-range flight, preferably avoiding populated areas or minimizing it as appropriate. The choice of take-off and landing location is also an important issue; in both cases, it should take place in a supervised location. Due to the unknown materials or the event of a risk of infection, it is absolutely justified to keep unauthorized persons away. These latest rules are more or less the same as were in case of the drone delivery application supporting population with essential goods.
6. General Characteristics of Spraying Disinfection
The disinfectant is applied in the same way as the spray liquid: flying over a given area at a specified altitude and speed with the set liquid flow, the disinfectant is delivered to the surface by means of a pump. Covering the surface depends on many things one of the most important is the feature of droplets.
The size of the droplets and the size of the surface covered by a droplet is determined by the water, which makes up the vast majority of the spray liquid. The surface tension of water is relatively high, so that the droplets on the surface are only slightly deformed. By adding a surface tension reducing additive, a higher surface coverage can be achieved under unchanged other conditions. This is typically a firefighting practice when the water is “wetting” by the addition of some surfactant for better surface coverage. The need for this can be justified by the fact that the effect of the forces acting on the molecules of water cannot be neglected if the water drop is placed on a solid surface. Depending on the attractive and repulsive forces, the water droplet spreads well or not so well. It means it wets the surface or wets the surface less. The degree of wetting can be characterized by the wetting edge angle (Θ). If the edge angle is greater than 90 degrees, then we are talking about non-wetting; if less than 90 degrees, we are talking about wetting. The change in water droplet due to wetting is illustrated in Figure 3.
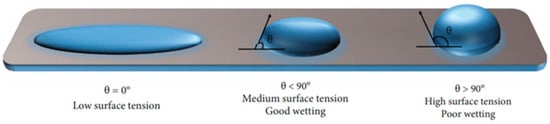
Figure 3. Water droplet structure on surface with and without surface tension reducing additive. θ is the contact angle between the droplet and the surface. High θ values means poor wetting (right); low values mean good wetting (middle). In case of θ = 0°, surface tension is very low (left)[15].
References
- Restas, Agoston. Path Planning Optimization with Flexible Remote Sensing Application; Hamid, Abdul, Eds.; IntechOpen: London, 2019; pp. 7, 10, 12.
- Bellman, Richard; Dynamic programming treatment of the travelling salesman problem. J. Assoc. Comp. Mach. 1962, 9, 61-63.
- Malandraki, Chryssi and Daskin, Mark; Time dependent vehicle routing problems: Formulations, properties and heuristic algorithms. Transp. Sci. 1992, 26, 185 - 200.
- Applegate, David L.; Bixby, Robert E.; Chvátal, Vašek and Cook William J.. The Traveling Salesman Problem: A Computational Study; Princeton University Press: Princeton, 2007; pp. 608.
- Psaraftis, Harilaos N; A dynamic programming solution to the single vehicle many-to-many immediate request dial-a-ride problem. Transp. Sci. 1980, 14(2), 130-154.
- Mingozzi, Aristide; Bianco, Lucio; Ricciardelli, Salvatore; Dynamic programming strategies for the traveling salesman problem with time window and precedence constraints. Oper. Res 1997, 45(3), 365–377.
- Restas, Agoston; Hinkley, Everett A.; Ambrosia, Vincent G.; An approach for measuring the effectiveness of fire detection systems in different dimensions. Bolyai Szle 2014, 23, 283–296.
- How smarter AI™-powered cameras can mitigate the spread of Wuhan Novel Coronavirus (COVID-19), and what we’ve learned from the SARS outbreak 17 years prior . AnyConnect Academy. Retrieved 2022-1-12
- IR-based Detection of Elevated Body Temperature for Coronavirus, SARS, Ebola . InfraTec. Retrieved 2022-1-12
- Thermal Imaging for Detecting Elevated Body Temperature . Flir. Retrieved 2022-1-12
- Marcos Daza; Dennis Barrios-Aranibar; José Diaz-Amado; Yudith Cardinale; João Vilasboas; An Approach of Social Navigation Based on Proxemics for Crowded Environments of Humans and Robots. Micromachines 2021, 12, 193, 10.3390/mi12020193.
- Asma Troudi; Sid-Ali Addouche; Sofiene Dellagi; Abderrahman El Mhamedi; Logistics Support Approach for Drone Delivery Fleet. Lecture Notes in Computer Science 2017, LNCS 10268, 86-96, 10.1007/978-3-319-59513-9_9.
- Hutchinson, E. Bruce; A Cost Analysis Of Amazon Prime Air (Drone Delivery). J. Econ. Educ. 2016, 16(1), 1-12.
- Comparing the cost-effectiveness of drones v ground vehicles for medical, food and parcel deliveries . Unmanned Airspace. Retrieved 2022-1-12
- Kirthika Senthil Kumar; Po-Yen Chen; Hongliang Ren; A Review of Printable Flexible and Stretchable Tactile Sensors. Research 2019, 2019, 1-32, 10.34133/2019/3018568.
More
Information
Subjects:
Transportation Science & Technology; Automation & Control Systems; Health Care Sciences & Services
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
973
Entry Collection:
COVID-19
Revision:
1 time
(View History)
Update Date:
12 Jan 2022
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No