Your browser does not fully support modern features. Please upgrade for a smoother experience.
Submitted Successfully!
 +1 credit
+1 credit
Thank you for your contribution! You can also upload a video entry or images related to this topic.
For video creation, please contact our Academic Video Service.
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Yue Zhang | + 2899 word(s) | 2899 | 2021-10-21 03:36:16 | | | |
| 2 | Conner Chen | Meta information modification | 2899 | 2021-11-04 01:45:50 | | |
Video Upload Options
We provide professional Academic Video Service to translate complex research into visually appealing presentations. Would you like to try it?
Cite
If you have any further questions, please contact Encyclopedia Editorial Office.
Zhang, Y. Textile-Based Mechanical Sensors. Encyclopedia. Available online: https://encyclopedia.pub/entry/15664 (accessed on 27 July 2026).
Zhang Y. Textile-Based Mechanical Sensors. Encyclopedia. Available at: https://encyclopedia.pub/entry/15664. Accessed July 27, 2026.
Zhang, Yue. "Textile-Based Mechanical Sensors" Encyclopedia, https://encyclopedia.pub/entry/15664 (accessed July 27, 2026).
Zhang, Y. (2021, November 03). Textile-Based Mechanical Sensors. In Encyclopedia. https://encyclopedia.pub/entry/15664
Zhang, Yue. "Textile-Based Mechanical Sensors." Encyclopedia. Web. 03 November, 2021.
Copy Citation
Innovations related to textiles-based sensors have drawn great interest due to their outstanding merits of flexibility, comfort, low cost, and wearability. Textile-based sensors are often tied to certain parts of the human body to collect mechanical, physical, and chemical stimuli to identify and record human health and exercise. Until now, much research and review work has been carried out to summarize and promote the development of textile-based sensors. As a feature, we focus on textile-based mechanical sensors (TMSs), especially on their advantages and the way they achieve performance optimizations
textile-based mechanical sensors
1. Resistive Sensor
Resistive TMSs convert mechanical stimuli, such as displacement or force to a resistance change, using piezoresistive materials. As the resistance of a conductive material is defined as R = ρL/S, when a mechanical stimulus causes changes of the piezoresistive materials in resistivity (ρ), length (L), and/or cross-sectional area (S), it will bring out a resistance change. The sensing response of resistive TMSs depends on the interaction of these main factors: (1) intrinsic changes in the resistance of sensing elements in response to mechanical stimuli; (2) geometric variation of assembled devices; and (3) changes in the conduction network. Based on a regression curve, the mechanical stimuli and their degrees can be determined. Because resistive TMSs often have the advantages of high sensitivity, wide detection range, high precision, and simple measurement circuits, they have received the most extensive attention and study [1]. However, large signal drift, poor durability, and obvious hysteresis are the key issues that restrict their practical application [2].
Resistive TMSs are typically composed of a soft substrate and a sensing material [3]. The soft substrate needs have properties such as a certain elasticity, good flexibility, and long-term stability. These properties can provide a carrier for sensing materials, and endow the sensing materials and subsequent textiles with piezoresistive properties. They can also reduce the stress concentration of TMSs when subjected to mechanical stimuli. Commonly used substrate materials for TMSs include silk, cotton, polydimethylsiloxane (PDMS), polyurethane (PU), etc. Correspondingly, commonly used sensing materials have carbon materials, metal materials, conductive polymers, etc. The sensing materials need to be both conductive and mechanically robust, which are typically prepared by coating, depositing, winding, or electroplating functional conductive layer on fibers, yarns, or fabrics, and they can also be prepared by wet spinning or 3D printing processes. Functional fibers and yarns can be attached to complex surfaces or woven into fabrics, which makes the sensors adaptable to different application scenarios by changing their shape and can be prepared in a sustainable and large-scale way. Neves et al. [4] produced conductive fibers by coating graphene onto polymer fibers that could be bent, stretched, compressed, twisted, and deformed into complex shapes while still maintaining good performance and reliability (Figure 1a). These graphene-based conductive fibers can be utilized as a platform for constructing integrated electronics directly in textiles. The stretch property of the conductive coating layer is often significantly lower than that of the textile substrate, which often leads to the formation of cracks in large deformations, resulting in reduced sensing stability. Additionally, as the textile surface is coated with a relatively rigid layer of conductive material, the feel and comfort of the fabric will be different. Composite conductive fiber—fiber adding conductive materials—can maintain the characteristics of the main fiber, such as the feeling and wear resistance. The structure of composite fibers is more integrated than that of coated textiles, effectively improving the problem of micro-cracks on the surface of coated fibers. Li et al. [5] used a syringe to extrude a mixture of conductive multiwalled carbon nanotubes (MWCNTs) and PDMS through a mesh with micron-sized holes to fabricate functional fibers (Figure 1b). The fibers as part of a wearable sensor were then integrated into a smart glove to recognize finger dexterity, gestures, and temperature signals. This preparation method is simple and convenient, but it is not suitable for large scale preparation of functional fibers. Wang et al. [6] used a concentric nozzle to rapidly and precisely print nanofibers with a bilayer structure (Figure 1c). The inner layer of the nanofiber acts as a sensing layer composed of metal or conductive polymer materials, whereas the outer layer acts as a protective and supportive layer that consists of long-chain polymer materials. The smart mask made from the nanofibers by a one-step progress can be used to detect whether the mask is worn properly and whether breathing is abnormal. Additionally, traditional textile manufacturing technologies of wet spinning and electrostatic spinning are also applicable to fabricate functional fibers. Sheng et al. [7] prepared porous fiber-based strain sensors by the wet-spinning method, wherein thermoplastic polyurethane was used as elastomer and carbon nanotubes (CNTs) and graphene as conductive fillers (Figure 1d). Before wet-spinning, dispersants and binders were introduced to improve the interaction between the elastomer and the conductive fillers to achieve the purpose of effectively withstanding external forces. Qi et al. [8] used a simple electrostatic spinning technique to prepare nanofiber sensing yarn, which was composed of a fibrous core electrode wrapped and wound by piezoresistive elastic nanofibers (Figure 1e). The yarn showed a fine layered structure, and could be woven into fabrics to achieve multi-mode sensing of various mechanical stimuli.
Fabric-based mechanical sensors can also be designed and prepared by the methods of coating, deposition, inkjet printing, screen printing, etc. Among them, directly coating sensing material onto common fabrics is the simplest and easiest method to achieve large-scale TMSs preparation. However, this method will bring about a poor bond between the sensing material and the flexible fabrics, so that the stability and durability of the prepared TMSs cannot be guaranteed. Thus, how to improve the adhesion between the two materials has become the first problem to be solved in the preparation of high-performance TMSs, wherein functionalized molecular grafting sensing materials is one of the preferred methods. Liu et al. [9] coated fluorinated MXene nanosheets onto 15 different fabrics, because the surface of the MXene is rich in a large amount of functional groups that interact with the fabric surface to improve adhesion between the two. It has been experimentally proven that the MXene formed a strongest bond with pure cotton and will not come off even after washing and ultrasonic processing. In addition, the adhesion can be enhanced by improving the preparation process of the TMSs. A multifunctional mechanical-sensitive fabric is prepared via ultrasonically spraying reduced graphene oxide (rGO) and silver nanowires (AgNWs) onto synthetic and 100% natural cotton fabrics (Figure 1f). The obtained fabrics show a good durability and can be washed repeatedly without performance degradation [10]. Luo et al. [11] used simple and efficient screen printing to transfer high-performance AgNW inks onto stretchable fabrics (Figure 1g), which presented excellent tensile properties and sensing performance. Conveniently, sensing materials with different patterns can be printed by simply changing the screen with different shapes, and fabric-based mechanical sensors prepared by printing processes can be designed into desired patterns to improve the sensing range, sensitivity, and other properties of resistive sensors. In summary, the coating and screen-printing method is easy to implement TMSs with superior sensitivity and a relatively large sensing range. However, the low linear correlation and cyclic stability of the sensing layer greatly limit its practical application.
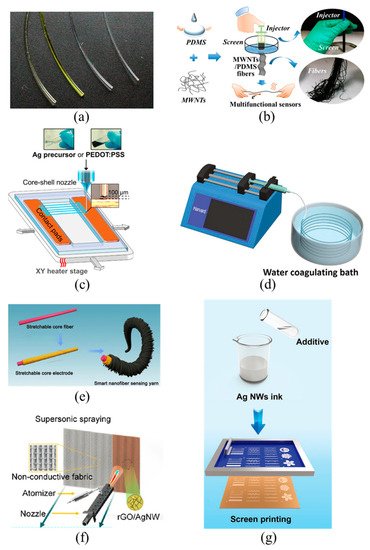
Figure 1. Illustration of the manufacturing process of various resistive textile-based mechanical sensors (TMSs). PDMS means polydimethylsiloxane, MWNTs means multi-walled carbon nanotubes, PEDOT:PSS means poly(3,4-ethylenedioxythiophene)/poly(styrenesulfonate), rGO means reduced graphene oxide and AgNWs means silver nanowires. Fiber-based sensors prepared by (a) coating, reproduced with permission from [4]; (b) extrusion, reproduced with permission from [5]; (c) printing, reproduced with permission from [6]; and (d) wet spinning, reproduced with permission from [7]; (e) Yarn-based sensors prepared by electrostatic spinning, reproduced with permission from [8]; Fabric-based sensors prepared by (f) spraying, reproduced with permission from [10]; and (g) screen printing, reproduced with permission from ref. [11].
2. Capacitive Sensor
Capacitive TMSs are realized based on the capacitance changes of the sensing devices induced by external mechanical stimuli. The capacitance of a sensing device is defined as C = εrεoA/d, where εr is the relative permittivity, εo is the vacuum permittivity, A is the effective area of the electrode, and d is the pole-plate spacing [12]. Therefore, the change of one or more parameters of the permittivity, spacing, or effective area will cause a change in capacitance of the device, and then the magnitude of the mechanical stimulus that causes the parameter change can be quantified. Capacitive TMSs feature properties of high response repeatability, small signal drift, long term cycle stability, and low energy consumption, but they are susceptible to external field interference, relatively low sensitivity, and limited sensing range [13].
In contrast, the fabrication of capacitive TMSs is more challenging than for resistive ones, because capacitive TMSs usually consist of two electrode layers and a dielectric layer [14], wherein the electrodes require good electrical conductivity; commonly used electrode materials include conductive fabrics, metal wires, carbon materials, etc. Although each electrode needs to be conductive, the capacitive response is irrelevant to the change in resistance of the electrode during exposure to mechanical stimulation. At the same time, the materials used as dielectric layers usually possess a large dielectric constant to reduce leakage current. Commonly used dielectric materials are elastic polymers, fabric gaskets, ionic gels, etc.
The preparation method of the capacitive TMSs is similar to that of the resistive ones, but the configurations of the two devices are different. The device configuration of a capacitive TMS can be roughly divided into two types. The first configuration is constructed as a sandwich structure, which consists of two flat electrodes composed of conductive fabrics and a dielectric layer composed of common fiber membranes or ionic gel membranes sandwiched between the electrodes. This type of structure is the most common one, which usually endows the device with a large sensing range. Keum et al. [15] prepared sandwich-structure ion-electron pressure TMSs using silver-plated compound silk fibers as electrodes and high-permittivity ion gel membranes as the dielectric material. The composition and membrane thickness of the ionic gel were designed to maximize the change of the contact area between the conductive fabrics and the ionic gel under external forces, which in turn optimized the sensing performance of the devices. Fu et al. [16] prepared a flexible pressure TMS by using fabrics sprayed with AgNWs as the flexible electrodes and a ceramic nanofiber film fabricated via an electrostatic spinning process as the dielectric layer (Figure 2a). The obtained pressure sensor can be used to detect human health conditions and motion, such as pulse, vocal cord vibration, and body movement, etc. The second type of configuration of capacitive TMSs is equipped with a core-sheath structure fabricated by coating and coaxial spinning. Compared with the capacitive TMSs with a sandwich structure, the TMSs with a core-sheath structure are smaller and easier to embed into clothes. Capacitive TMSs can be obtained by fiber crossing. Guan et al. [17] prepared silver nanowire-bacterial cellulose fibers with porous structures using a wet-spinning process and then coaxially coated the fibers with PDMS to produce functional fibers with a core-sheath structure (Figure 2b). A capacitive multifunctional sensor was fabricated by arranging the functional fibers crosswise to form an interpenetrating network, in which the AgNWs-bacterial cellulose fibers served as electrodes and the PDMS coating acted as the dielectric layer. By detecting changes in capacitance, the sensor could detect both the pressure and the position of objects. Additionally, Zhang et al. [18] prepared a high-performance capacitive strain sensor by twisting two core-spun yarns into a fine double-ply yarn (Figure 2c). The core-spun yarns were fabricated by wrapping silver-coated nylon fibers with cotton fibers, and then they were fixed with polyurethane. The sensor exhibits good linearity and tensile properties and can be blended into wearable fabrics to monitor athletes and patients without compromising lifestyle or comfort.
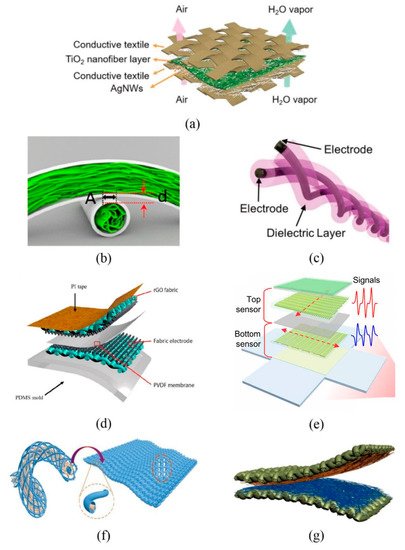
Figure 2. Schematic diagrams of TMSs configurations based on capacitive, piezoelectric, and triboelectric sensing mechanisms. PDMS means polydimethylsiloxane, PI means polyimide, rGO means reduced graphene oxide and PVDF means polyvinylidene fluoride. (a) sandwich structure fabric capacitive sensors, reproduced with permission from [16]; (b) crossed fiber capacitive sensors, reproduced with permission from [17]; (c) helix fiber capacitive sensors, reproduced with permission from [18]; (d) sandwich structure piezoelectric sensors, reproduced with permission from [19]; (e) double-layer piezoelectric sensors with vertical arrangement, reproduced with permission from [20]; (f) coaxial fiber triboelectric sensors, reproduced with permission from [21]; and (g) double-layer triboelectric sensors, reproduced with permission from ref. [22].
3. Piezoelectric Sensor
Piezoelectric TMSs are produced from flexible materials with piezoelectric effects, which work by converting mechanical stimuli into voltage signals [23]. The piezoelectric constant of the piezoelectric material determines the performance of a piezoelectric sensor in converting mechanical energy into electrical energy. Commonly used piezoelectric materials include composites, polymers, ceramics, single crystals, etc. [24].
Piezoelectric TMSs can generate internal voltage when subjected to external pressure, which makes them self-powered while achieving pressure sensing. In addition, such TMSs often present the advantages of fast response time and high sensitivity [25], giving them great prospects in wearable devices. Tan et al. [19] prepared piezoelectric TMSs using the piezoelectric effect of the single-crystalline ZnO nanorods grown on conductive rGO-PET fabric (Figure 2d). The piezoelectric TMS is constructed with three layers consisting of polyvinylidene fluoride (PVDF) membrane, the top and bottom electrode layers of conductive rGO-PET fabrics with self-orientation ZnO nanorods. When subjected to an external force, the piezoelectric configuration deformed, leading to a potential difference between the two electrode layers so the magnitude of external force can be obtained by detecting the voltage change. Hong et al. [20] provided a new solution of designing anisotropic kirigami structures and manufacturing a functional piezoceramic network to monitor joint motions and distinguish between different motion modes, in which the piezoelectric composite is the core sensory element for the sensors, formed by a lead zirconate titanate (PZT) ceramic network with nylon textile with kirigami-structured honeycomb grids and a PDMS matrix (Figure 2e). Piezoelectric sensors show obvious advantages in measurement range, piezoelectric anisotropy, multifunctional measurement, and long-term monitoring, which greatly enhance their practical application range.
4. Triboelectric Sensor
The frictional initiation effect is a normal phenomenon in daily life. It occurs when a material is subjected to normal contact, sliding, or twisting. The combining of the electrification effect/triboelectric effect and electrostatic induction is the principle of triboelectric TMSs that occurs among a broad range of materials, including synthetic polymers and natural silk [26], wool [27], and cotton [28]. Similar to piezoelectric sensors, triboelectric TMSs can convert mechanical motion into electrical signals, and in turn, by analyzing the obtained signals, dynamic mechanical motions can be interpreted. By correlating the mechanical input with the corresponding parameters, a series of triboelectric TMSs have been fabricated, including pressure sensors, strain sensors, and vibration sensors. Triboelectric TMSs are generally composed of two electrodes with different tribo-polarities; the greater the difference in tribo-polarities between the two electrode materials, the better the electrical performance of the sensors [29]. Commonly used positively charged materials include nylon, cotton, silver, and copper, whereas commonly used negatively charged materials include PDMS, PVDF, polytetrafluoroethylene (PTFE), etc. [30]. The advantages of triboelectric TMSs, such as low cost, simple preparation process, high output voltage, and self-power, will strongly promote the construction of the Internet of Things [31].
Triboelectric TMSs can be divided into two kinds. One kind is a single yarn device with two frictional electrical sequences that are woven into fabrics or textiles. Zhang et al. [21] prepared a coaxial triboelectric yarn by sequentially wrapping PTFE and Ag yarns around axial metallized silver yarn via a winding machine (Figure 2f). The fabricated triboelectric yarn was then woven into wearable, multifunctional textile by needles to harvest the mechanical energy from human body motions. Since the tribo-polarities between PTFE and Ag materials differ greatly, charge transfer was easily achieved in repeated contact–separation processes. The second kind of triboelectric TMSs is obtained by directly weaving two types of yarns or fibers with inherently different tribo-polarities. Fan et al. [32] wove terylene wrapped stainless steel conductive yarns and nylon yarns into an all-textile triboelectric sensing array. Guo et al. [22] fabricated a textile based wearable hybrid triboelectric-piezoelectric TMS composed of silk fibroin nanofibers and PVDF nanofibers that were electrospun onto conductive fabrics as the triboelectric pair. Before fabricating a cloth-shape smart device, the two triboelectric fabrics were attached to separate substrates to realize effective contact and separation (Figure 2g). The hybrid TMS is capable of generating both triboelectricity and piezoelectricity at the same time to realize high power generation that enables its use as a sensor to identify various types of body motion without another power supply.
Each of the different types of TMSs has its own pros and cons. Resistor TMSs are by far the most widely studied and applied due to the simple principle and read-out circuit. Compared with other types, capacitor TMSs have a longer lifetime due to lower heat generation. In addition, they also show applications in non-contact measurements because of the sensing mechanism. Piezoelectric and triboelectric TMSs are difficult to detect static forces due to charge loss. Despite the fact that piezoelectric and triboelectric TMSs are limited by the inability to detect static forces and their applications are restricted, they are still a current research hotspot owing to their huge advantages of self-powering. How to overcome the shortcomings of piezoelectric and triboelectric TMSs that cannot detect static forces is a major challenge. The resistive and capacitive TMSs have wider applications in most scenarios. However, in some harsh environments, they need to replace the power supply in time, which necessitates more labor and material resources. Whereas the piezoelectric and triboelectric TMSs are self-powered, and the signal can be detected in the field for a long time, which greatly saves cost.
References
- Pizarro, F.; Villavicencio, P.; Yunge, D.; Rodríguez, M.; Hermosilla, G.; Leiva, A. Easy-to-build textile pressure sensor. Sensors 2018, 18, 1190.
- Gong, Z.; Xiang, Z.; OuYang, X.; Zhang, J.; Lau, N.; Zhou, J.; Chan, C.C. Wearable fiber optic technology based on smart textile: A review. Materials 2019, 12, 3311.
- El Gharbi, M.; Fernández-García, R.; Ahyoud, S.; Gil, I. A review of flexible wearable antenna sensors: Design, fabrication methods, and applications. Materials 2020, 13, 3781.
- Neves, A.I.; Rodrigues, D.P.; de Sanctis, A.; Alonso, E.T.; Pereira, M.S.; Amaral, V.S.; Melo, L.V.; Russo, S.; de Schrijver, I.; Alves, H. Towards conductive textiles: Coating polymeric fibres with graphene. Sci. Rep. 2017, 7, 4250.
- Li, Y.; Zheng, C.; Liu, S.; Huang, L.; Fang, T.; Li, J.X.; Xu, F.; Li, F. Smart glove integrated with tunable MWNTs/PDMS fibers made of a one-step extrusion method for finger dexterity, gesture, and temperature recognition. ACS Appl. Mater. Interfaces 2020, 12, 23764–23773.
- Wang, W.; Ouaras, K.; Rutz, A.L.; Li, X.; Gerigk, M.; Naegele, T.E.; Malliaras, G.G.; Huang, Y.Y.S. Inflight fiber printing toward array and 3D optoelectronic and sensing architectures. Sci. Adv. 2020, 6, eaba0931.
- Sheng, N.; Ji, P.; Zhang, M.; Wu, Z.; Liang, Q.; Chen, S.; Wang, H. High sensitivity polyurethane-based fiber strain sensor with porous structure via incorporation of bacterial cellulose nanofibers. Adv. Electron. Mater. 2021, 7, 2001235.
- Qi, K.; Zhou, Y.; Ou, K.; Dai, Y.; You, X.; Wang, H.; He, J.; Qin, X.; Wang, R. Weavable and stretchable piezoresistive carbon nanotubes-embedded nanofiber sensing yarns for highly sensitive and multimodal wearable textile sensor. Carbon 2020, 170, 464–476.
- Liu, R.; Li, J.; Li, M.; Zhang, Q.; Shi, G.; Li, Y.; Hou, C.; Wang, H. MXene-coated air-permeable pressure-sensing fabric for smart wear. ACS Appl. Mater. Interfaces 2020, 12, 46446–46454.
- Kim, T.; Park, C.; Samuel, E.P.; An, S.; Aldalbahi, A.; Alotaibi, F.; Yarin, A.L.; Yoon, S.S. Supersonically sprayed washable, wearable, stretchable, hydrophobic, and antibacterial rGO/AgNW fabric for multifunctional sensors and supercapacitors. ACS Appl. Mater. Interfaces 2021, 13, 10013–10025.
- Luo, C.; Tian, B.; Liu, Q.; Feng, Y.; Wu, W. One-step-printed, highly sensitive, textile-based, tunable performance strain sensors for human motion detection. Adv. Mater. Technol. 2020, 5, 1900925.
- Duan, L.; D’hooge, D.R.; Cardon, L. Recent progress on flexible and stretchable piezoresistive strain sensors: From design to application. Prog. Mater. Sci. 2020, 114, 100617.
- Chen, L.; Lu, M.; Yang, H.; Salas Avila, J.R.; Shi, B.; Ren, L.; Wei, G.; Liu, X.; Yin, W. Textile-based capacitive sensor for physical rehabilitation via surface topological modification. ACS Nano 2020, 14, 8191–8201.
- Ferri, J.; Llinares Llopis, R.; Moreno, J.; Ibañez Civera, J.; Garcia-Breijo, E. A wearable textile 3D gesture recognition sensor based on screen-printing technology. Sensors 2019, 19, 5068.
- Keum, K.; Eom, J.; Lee, J.H.; Heo, J.S.; Park, S.K.; Kim, Y.-H. Fully-integrated wearable pressure sensor array enabled by highly sensitive textile-based capacitive ionotronic devices. Nano Energy 2021, 79, 105479.
- Fu, M.; Zhang, J.; Jin, Y.; Zhao, Y.; Huang, S.; Guo, C.F. A highly sensitive, reliable, and high-temperature-resistant flexible pressure sensor based on ceramic nanofibers. Adv. Sci. 2020, 7, 2000258.
- Guan, F.; Xie, Y.; Wu, H.; Meng, Y.; Shi, Y.; Gao, M.; Zhang, Z.; Chen, S.; Chen, Y.; Wang, H. Silver nanowire-bacterial cellulose composite fiber-based sensor for highly sensitive detection of pressure and proximity. ACS Nano 2020, 14, 15428–15439.
- Zhang, Q.; Wang, Y.L.; Xia, Y.; Zhang, P.F.; Kirk, T.V.; Chen, X.D. Textile-only capacitive sensors for facile fabric integration without compromise of wearability. Adv. Mater. Technol. 2019, 4, 1900485.
- Tan, Y.; Yang, K.; Wang, B.; Li, H.; Wang, L.; Wang, C. High-performance textile piezoelectric pressure sensor with novel structural hierarchy based on ZnO nanorods array for wearable application. Nano Res. 2021, 1–8.
- Hong, Y.; Wang, B.; Lin, W.; Jin, L.; Liu, S.; Luo, X.; Pan, J.; Wang, W.; Yang, Z. Highly anisotropic and flexible piezoceramic kirigami for preventing joint disorders. Sci. Adv. 2021, 7, eabf0795.
- Zhang, X.; Wang, J.; Xing, Y.; Li, C. Woven wearable electronic textiles as self-powered intelligent tribo-sensors for activity monitoring. Glob. Chall. 2019, 3, 1900070.
- Guo, Y.; Zhang, X.-S.; Wang, Y.; Gong, W.; Zhang, Q.; Wang, H.; Brugger, J. All-fiber hybrid piezoelectric-enhanced triboelectric nanogenerator for wearable gesture monitoring. Nano Energy 2018, 48, 152–160.
- Li, J.; Fang, L.; Sun, B.; Li, X.; Kang, S.H. Recent progress in flexible and stretchable piezoresistive sensors and their applications. J. Electrochem. Soc. 2020, 167, 037561.
- Zhang, C.; Fan, W.; Wang, S.; Wang, Q.; Zhang, Y.; Dong, K. Recent progress of wearable piezoelectric nanogenerators. ACS Appl. Electron. Mater. 2021, 3, 2449–2467.
- Park, C.; Kim, H.; Cha, Y. Fiber-based piezoelectric sensors in woven structure. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020; pp. 351–354.
- Wen, D.-L.; Liu, X.; Deng, H.-T.; Sun, D.-H.; Qian, H.-Y.; Brugger, J.; Zhang, X.-S. Printed silk-fibroin-based triboelectric nanogenerators for multi-functional wearable sensing. Nano Energy 2019, 66, 104123.
- Jeon, S.-B.; Kim, W.-G.; Park, S.-J.; Tcho, I.-W.; Jin, I.-K.; Han, J.-K.; Kim, D.; Choi, Y.-K. Self-powered wearable touchpad composed of all commercial fabrics utilizing a crossline array of triboelectric generators. Nano Energy 2019, 65, 103994.
- Zhu, M.; Shi, Q.; He, T.; Yi, Z.; Ma, Y.; Yang, B.; Chen, T.; Lee, C. Self-powered and self-functional cotton sock using piezoelectric and triboelectric hybrid mechanism for healthcare and sports monitoring. ACS Nano 2019, 13, 1940–1952.
- Liu, J.; Gu, L.; Cui, N.; Xu, Q.; Qin, Y.; Yang, R. Fabric-based triboelectric nanogenerators. Research 2019, 2019, 1091632.
- Liu, L.; Shi, Q.; Sun, Z.; Lee, C. Magnetic-interaction assisted hybridized triboelectric-electromagnetic nanogenerator for advanced human-machine interfaces. Nano Energy 2021, 86, 106154.
- Chen, G.; Au, C.; Chen, J. Textile triboelectric nanogenerators for wearable pulse wave monitoring. Trends Biotechnol. 2021, 39, 1078–1092.
- Fan, W.; He, Q.; Meng, K.; Tan, X.; Zhou, Z.; Zhang, G.; Yang, J.; Wang, Z.L. Machine-knitted washable sensor array textile for precise epidermal physiological signal monitoring. Sci. Adv. 2020, 6, eaay2840.
More
Information
Subjects:
Materials Science, Textiles
Contributor
MDPI registered users' name will be linked to their SciProfiles pages. To register with us, please refer to https://encyclopedia.pub/register
:
View Times:
1.7K
Revisions:
2 times
(View History)
Update Date:
04 Nov 2021
Table of Contents


Notice
You are not a member of the advisory board for this topic. If you want to update advisory board member profile, please contact office@encyclopedia.pub.
OK
Confirm
Only members of the Encyclopedia advisory board for this topic are allowed to note entries. Would you like to become an advisory board member of the Encyclopedia?
Yes
No
${ textCharacter }/${ maxCharacter }
Submit
Cancel
Back
Comments
${ item }
|
${ item.createdUser.fullName }
${ item.createdAt }
${ item.vote }
${ item.reply }
Delete
${ reply.createdUser.fullName }
${ reply.createdAt }
${ reply.vote }
Delete
There is no reply to this comment~
${ item.replyTextCharacter }/${ item.replyMaxCharacter }
Submit
Cancel
More
No more~
There is no comment~
${ textCharacter }/${ maxCharacter }
Submit
Cancel
${ selectedItem.replyTextCharacter }/${ selectedItem.replyMaxCharacter }
Submit
Cancel
Confirm
Are you sure to Delete?
Yes
No