 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Marko Höyhtyä | + 2322 word(s) | 2322 | 2020-08-12 06:19:58 | | | |
| 2 | Rita Xu | -471 word(s) | 1851 | 2020-08-17 08:14:27 | | |
Video Upload Options
Connectivity architecture connects main functional blocks or entities of a system with well-defined interfaces enabling interoperability, fluent data flows and information sharing in timely manner. Local connectivity architecture defines e.g. the architecture inside an autonomous ship. The wider-scale architecture includes geographically distributed entities such as vessels, databases, and remote operations centers.
1. Introduction
Different autonomous systems such as cars, robots, drones, and ships rely on the same environmental detection techniques [1][2][3][4][5][6][7][8][9][10][11][12][13][14][15][16][17]. They will also need data transmission and remote updatability for sensors. There are also clear differences in these domain areas due to the operational environment, the size of the vehicles, and their maneuverability. Autonomous and remote-controlled ships are becoming a reality and R&D has been very active, especially in the Nordic countries, as well as recently in, e.g., Singapore and Korea. Autonomous ships are able to avoid collisions by sensing the environment and making independent decisions. The vessels are required to monitor the health of machinery, use predictive diagnostics, and communicate critical information inside and outside the ship.
We have performed a thorough literature review and interviewed multiple companies during the course of work to obtain a wide view of the current status and trends in the development of autonomous shipping. Key benefits and drivers of future smart ships include safety, reliability, and efficiency. There is much potential in the development of logistics chains and joint optimization with the ports, e.g., to minimize waiting times of cargo ships and improve fuel efficiency. Automation and the digitalization of ships will improve the work experience of the personnel by freeing their brains and hands to other duties by, e.g., automated routing, collision avoidance and enabling totally or periodically unmanned bridges.
The first autonomous ships will include ferries as well as cargo ships that are operating on certain routes. Some of these could be defined as “truck routes replaced by ship routes”. Partly due to connectivity restrictions, the operations will first consider close-to-shoreline routes. National regulations are also advancing the work more rapidly in national waters compared to the global domain.
A crucial enabler for smart ships both in local waters and in global operations will be connectivity [5][6][7][8]. A good connection with a latency that is low enough also enables telexistence, i.e., the real-time sensation of being at a ship from a shore, and being able to interact with the remote environment [9]. The connectivity solution has to guarantee sufficient communication link capacity for sensor monitoring and remote control. Connectivity between the ship and the shore is crucial to enable human inputs and remote operations. Communication needs to be bidirectional, secure, scalable and redundant to minimize risks.
There are many published surveys related to autonomous systems in recent years. The surveys have focused on topics such as detection technologies for autonomous driving, unmanned aerial vehicles (UAVs), coverage path planning for robotics, and autonomous maritime systems. Most of the autonomous ship research has focused on the development of navigation, sensing, collision avoidance and related technologies. Little research has been published on connectivity specific development and surveys on data transmission needs and possible technologies to fulfill the needs. We have summarized the current state of the art in Table 1, also clarifying the novelty of our article.
Table 1. Comparison to current state of the art and novelty of this article.
| Topic of the Article | Contributions Given in the Article |
|---|---|
| Intelligent Transportation Systems and Related Technologies | Vehicle detection and collision avoidance technologies [1], data-driven intelligent transportation systems with learning aspects [2], communications solutions for automated driving and connected vehicles [3] |
| Unmanned Aerial Vehicles and Their Connectivity | Communication solutions for UAVs, covering characterization of networks, routing, seamless handover and energy efficiency [10]; Latest 5G and Beyond technologies for UAVs in [11] |
| Coverage Path Planning for Robotics and Ships | A survey on determining a path that passes over all points of an area or volume of interest while avoiding obstacles [12]. Covers autonomous harvesters, vacuum cleaners, maritime applications, etc. |
| Underwater Vehicle Communications | Comprehensive survey on underwater robotics until 2000 in [13]. Recent survey looking at RF, optical and acoustic communications [14] |
| Autonomous Ship Technologies | Classification of existing autonomous surface vessel prototypes [15]. Application of surface vehicles and development on guidance, navigation and control in [16]. Assessment of safety issues in remote-controlled vessels [17] |
| Maritime Communications Including Autonomous Ships | Survey covering underwater, UAV and surface networks [18]. Hybrid architecture and identification of the data transmission needs of an autonomous ship [5], intelligent network management for hybrid network [8], maritime cybersecurity aspects covered in [19] |
| Autonomous Ship Connectivity: Standardization, Architecture and Simulations | Novelty in this article: Updated technology survey for unmanned and remote-controlled surface vessels with future research directions. Both in-ship and ship-to-outside connections considered. Focus on 5G standardization, integrated satellite–terrestrial communications, and discussion on how to use ship simulators in connectivity research |
2. Connectivity Architecture
An autonomous vessel needs connectivity both inside the ship and outside to fulfill the requirements of different subsystems and services. While the in-ship network is mostly realized with cables, there are possibilities to use wireless connections, e.g., for different environmental sensors. Ship-to-outside connections are wireless.
2.1. In-Ship Communications
The network architecture for an autonomous vessel is described in Figure 1, focusing on in-ship network components and high-level ship-to-outside connections. The described architecture enables efficient data transfer and data processing on board.
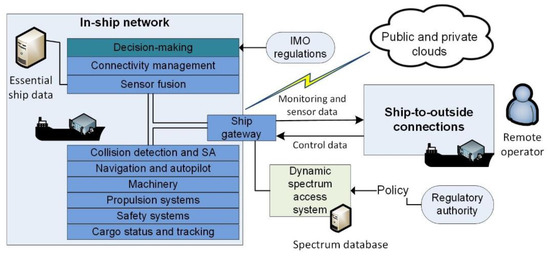
Figure 1. Network architecture for an autonomous ship.
In order to automate a ship and make remote-controlled operations possible, one needs to have multiple data generating systems inside a vessel. In the proposed architecture, essential ship data database is a storage that includes all relevant data needed for autonomous operation. It gathers the data from different systems inside a ship and the reduced, fused data are sent to the remote operators.
Collision detection and situational awareness (SA) sensors produce more data than any other system in the architecture. The data comes from numerous systems such as radars, optical and infrared cameras, temperature and wind sensors, etc. The total amount of SA data grows quickly when multiple sensors with high resolution are used—a single high-definition video stream can be multiple megabytes per second. It should be noted that people can interpret imperfect SA sensor data. Thus, data processing and sensor fusion is used to reduce the amount and send only the needed part of the data to human operators or to the internal decision making. For example, 3D light detection and ranging (LiDAR) files with high resolution can be hundreds of megabytes each [5]. Using image processing methods on board of a ship one can transform a figure to a two-dimensional one and select only the relevant part of the figure to be transmitted. This could reduce the size of the figure, e.g., with a compression ratio of 200 before transmission. Sensor fusion not only reduces data, but it increases system robustness and reliability and broadens the sensing capabilities.
The SA data are used together with the navigation data from automatic identification system (AIS) system and global navigation satellite systems (GNSS) to decide how to sail safely in any environment. The vessel is kept at the intended heading and position based on the SA data and dynamic positioning (DP) computer calculations that take into account wind, waves, and current. The DP system controls the thrusters and main propellers of the vessel accordingly. The aim for the decision making is to have as much intelligence on board of a ship as possible and enable it to operate autonomously for extended periods of time. However, the architecture enables opening a connection to remote operators when needed, so that a “virtual captain” could perform critical operations when the decision making at the ship, or the people on board, cannot solve the situation.
All vessels sailing in international waters are required to carry global maritime distress and safety (GMDSS) equipment in order to ensure the safety of life at sea. The equipment is used for alerting of a distress condition (including position), search and rescue, maritime safety information and general communications. IMO has published the international regulations for preventing collisions at sea (COLREGs) that define navigation rules to be followed at sea to prevent collisions between two or more vessels [20]. These rules have to be taken into account by the decision-making entity and the autopilot of the autonomous ship while steering the vessel in different situations. How early the decision and control command to stop or change the route and speed is made is based on the maneuverability of the ship.
In-ship systems also include sensors and actuators on machinery, ballast tanks, safety systems, cargo status and tracking and all these require data transmission. The majority of the in-ship critical communication is achieved using cables due to reliability requirements. In addition, the system needs to be redundant so that, e.g., a failure of a single router does not prevent critical connections.
2.2. Ship Gateway
Different systems in a ship may use different radio interfaces and wired connections. An autonomous vessel connects to other vessels and remote locations using satellites and terrestrial technologies. Successful connectivity management demands a gateway providing interoperability between different networks and devices. The gateway uses protocol conversion to connect different parts and technologies in the network and acts as a connection point in the ship linking the sensors and actuators with the decision making and the outside world.
The ship gateway provides a communication link to the public and private clouds, enabling offline services and real-time control over the in-ship equipment. It sends monitoring and sensor data from the ship to the cloud and remote operators, and receives controlling data, providing authenticated access to the in-ship system. An authenticated gateway hardens the network against attackers from the outside world. Without authentication, malicious users cannot be blocked from the network and denial-of-service (DoS) attacks will be threats.
2.3. Spectrum and Interference Management
Spectrum resources are important in order to support the capacity requirements of an autonomous vessel and be able to send required data to the remote operators over the depicted satellite–terrestrial systems. The available bandwidth is currently limited and there are two basic options to increase this—first, allocating a dedicated spectrum resource for the maritime connectivity system, which would most probably mean the use of higher-frequency bands, since bands below 6 GHz are allocated and heavily used; second, using spectrum sharing and dynamic spectrum access (DSA) technologies to obtain more resources. We believe that connections should be mainly implemented with a dedicated spectrum and DSA is an optional method that could be used in the overall architecture as depicted. The shared band would be especially useful for non-latency critical data.
It has recently been demonstrated how to use licensed shared access (LSA) for critical communication services [21] such as public safety connectivity. The spectrum database should include information on where, when, and using which transmission power the transmission would be possible. With DSA technology, the autonomous ship could, e.g., re-use cellular frequencies in national or international waters and the spectrum regulators will play a key role in enabling this possibility.
Spectrum management and re-selection is also needed to avoid intentional interference and jamming. When interference is detected, the connection can be changed to another frequency band.
References
- Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle detection techniques for collision avoidance systems: A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338. doi:10.1109/TITS.2015.2409109.
- Zhang, J.; Wang F.-Y.; Wang K.; Lin W.-H.; Xu X.; Chen C. Data-driven intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. doi:10.1109/TITS.2011.2158001.
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A survey of the connected vehicle landscape—Architectures, enabling technologies, applications, and development areas. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2391–2406. doi:10.1109/TITS.2017.2749459.
- Tomic, T.; Schmid K.; Lutz P.; Domel A.; Kassecker M.; Mair E.; Lynne I.; Ruess F.; Suppa M.; Burschka D. Towards a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. doi:10.1109/MRA.2012.2206473.
- Höyhtyä, M.; Huusko, J.; Kiviranta, M.; Rokka, J.; Solberg, K. Connectivity for autonomous ships: Architecture, use cases, and research challenges. In Proceedings of the International Conference of ICT Convergence (ICTC), Jeju Island, Korea, 18–20 October 2017. doi:10.1109/ICTC.2017.8191000.
- Poikonen, J. Requirements and challenges of multimedia processing and broadband connectivity in remote and autonomous vessels. In Proceedings of the International Symposium of Broadband Multimedia Systems and Broadcasting (BMSB), Valencia, Spain, 6–8 June 2018. doi:10.1109/BMSB.2018.8436799.
- Rødseth, Ø.J.; Kvamstad, B.; Porathe, T.; Burmeister, H.-C. Communication architecture for an unmanned merchant ship. In Proceedings of theOCEANS13 MTS IEEE, Bergen, Norway, 10–13 June 2013.
- Höyhtyä, M. Connectivity manager: Ensuring robust connections for autonomous ships. In Proceedings of the International Conference on Intelligent Autonomous Systems (ICoIAS), Singapore, 28 February–2 March 2019. doi:10.1109/ICoIAS.2019.00022.
- Sasaki, S.; Okazaki, T. Development of telexistence on a ship using satellite communication. Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 175–180, doi:10.12716/1001.11.01.21.
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tuts. 2016, 18, 1123–1152. doi:10.1109/COMST.2015.2495297.
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2019, 6, 2241–2263. doi:10.1109/JIOT.2018.2887086.
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. doi:10.1016/j.robot.2013.09.004.
- Yuh, J. Design and control of autonomous underwater robots. Auton. Robots. 2000, 8, 7–24. doi:10.1023/A:1008984701078.
- Gussen, C.M.G.; Diniz P.; Campos M.; Martins W.; Costa F.; Gois J. A survey of underwater wireless communication technologies. J. Commun. Inf. Syst. 2016, 31, 242–255. doi:10.14209/jcis.2016.22.
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on autonomous surface vessels: Part II—Categorization of 60 prototypes and future applications. In Computational Logistics. ICCL 2017. Lecture Notes in Computer Science; Bektaş, T., Coniglio, S., Martinez-Sykora, A., Voß, S., Eds.; Springer: Berlin, Germany, 2017; Volume 10572, doi:10.1007/978-3-319-68496-3_16.
- Liu, Z.; Zhang, Y.; Yu. X.; Yuan, C. Unmanned surface vehicles: An overview of development and challenges. Annu. Rev. Control 2016, 41, 71–93. doi:10.1016/j.arcontrol.2016.04.018.
- Wrobel, K.; Montewka, J.; Kujala, P. System-theoretic approach to safety of remote-controlled merchant vessel. Ocean. Eng. 2018, 152, 334–345. doi:10.1016/j.oceaneng.2018.01.020.
- Zolich, A.; Palma D.; Kansanen K.; Fjortoft K.; Sousa J.; Johansson K.; Jiang Y.; Dong H.; Johansen T. Survey on communications and networks for autonomous marine systems. J. Intell. Robot. Syst. 2019, 95, 789–813. doi:10.1007/s10846-018-0833-5.
- Kavallieratos, G.; Diamantapoulou, V.; Katsikas, S. Shipping 4.0: Security requirements for the cyber-enabled ship. IEEE Trans. Ind. Informat., 2020, doi:10.1109/TII.2020.2976840.
- IMO. Convention on the International Regulations for Preventing Collisions at Sea, 1972 (COLREGs). Available online: http://www.imo.org/en/About/Conventions/ListOfConventions/Pages/COLREG.aspx (accessed on 5 May 2020).
- Höyhtyä, M.; Lähetkangas K.; Suomalainen J.; Hoppari M.; Kujanpää K.; Ngo K. T. Kippola T.; Heikkilä M.; Posti H.; Mäki J. et al. Critical communications over mobile operators’ networks: 5G use cases enabled by licensed spectrum sharing, network slicing, and QoS control. IEEE Access. 2018, 6, 73572–73582. doi:10.1109/ACCESS.2018.2883787.


