 +1 credit
+1 credit
Video Upload Options
Applications of wearable actuators mainly include wearable robotics, haptic devices, and smart textiles. Wearable robotics have been proven valuable in rehabilitation, body assistance, and/or virtual reality. These applications cover systems of various sizes, from millimeter-scale biorobots to large deployable structures.
1. Introduction
The global wearable market showed a dramatic swell in the past decade with a market size valued at USD 28 billion in 2020 and is expected to expand continually in the next decade. Wearable technology, an emerging trend, integrates sensors, actuators, and electronics that can be worn, embedded in fabric or accessories, or tattooed directly onto the skin to assist daily activities and address changing lifestyles. Wearable actuators, a subcategory of wearable technology, require a compatible modulus to the human body, a huge scope of motion with high precision and velocity, great strain energy density to generate a high force level, a low fatigue rate for a long lifetime, and good reliability.
Conventional actuators including rotary or linear electrical motors, pneumatic and hydraulic actuators [1] provide high power, fast response time, and have been applied in industries for centuries; they are, however, stiff, heavy, noisy, and nonbiological, which limit their applications in wearables. People expect the wearable actuators to be lightweight, inconspicuous, lifelike, and versatile when on the human body, while still achieving their purpose outstandingly. These requirements impelled the development of soft actuation technologies and have attracted enormous interest from researchers in various disciplines [2]. Unlike those traditional actuators, these actuators are small and light, and are not limited to the electrical–mechanical force conversion method. These soft actuators can respond to multiple stimuli such as heat, light, electricity and moisture, exerting force or producing shape changes [2].
Applications of wearable actuators mainly include wearable robotics, haptic devices, and smart textiles. Wearable robotics have been proven valuable in rehabilitation, body assistance, and/or virtual reality [3]. These applications cover systems of various sizes, from millimeter-scale biorobots to large deployable structures. Haptic devices allow the intent recognition and information transmission through the interface link between the device and the skin. They contain flexible tactile actuators that can transfer the signal through vibration or morphological change [4]. Smart textiles are textiles that can interact with the environment or respond to stimuli [5][6]. Examples of smart textile applications include electrocardiography-T-shirts/wristbands, electroencephalography caps and photovoltaic curtains [1].
There are several review articles introducing the material and working principles of various soft actuators, but few of them are focused on the scope of wearable actuators [2][5][7][8]. In this paper, we review the actuation mechanisms, structures, applications, and limitations of recently developed wearable actuators including pneumatic and hydraulic actuators, shape memory alloys and polymers, thermal and hygroscopic materials, dielectric elastomers, ionic and conducting polymers, piezoelectric actuators, electromagnetic actuators, liquid crystal elastomers, etc. Examples of the recent applications such as wearable soft robots, haptic devices, and personal thermal regulation textiles are highlighted. Finally, we point out the current bottleneck and suggest the prospective future research directions for wearable actuators.
2. Wearable Actuators: Materials, Structures, Applications, Merits and Limitations
McKibben actuators are typical pneumatic artificial muscles (PAMs). These actuators generally consist of an expandable chamber, normally a balloon, with other structures. By the pressurization of fluid in the chamber, these actuators can transform the expansion to a contraction force. Pneumatic and hydraulic actuators can generate linear, torsional, and bending actuation through the control of internal structures, which are normally inspired by bio-architectures. For example, inspired by muscular hydrostat, Schaffner et al. demonstrated complex motion modes on soft actuators by printing stiff silicone stripes on top of a soft silicone cylinder [9] ( Figure 1 a). With the arrangement of stiff fiber, this actuator can achieve bending, elongation, and other movements. Similarly, Kim et al. reported a lamina composed of not stretchable fiber, super-elastic matrix, and an adhesive backing [10]. This lamina is also named Stretchable Adhesive Uni-Directional prepreg (STAUD-prepreg) ( Figure 1 b). By adhering multiple prepreg on a stack, this soft actuator demonstrates complex motion. It is worth noting that with the rearrangement of prepregs, this actuator is reprogrammable, which makes it different than other predefined fluid-driven actuators. Based on vacuum-actuated muscle-inspired pneumatic structures (VAMPs), Li et al. proposed fluid-driven origami-inspired artificial muscles (FOAMs) composed of a folding skeleton, flexible fluid-tight skin, and fluid medium ( Figure 1 c) [11]. Through programing the geometry of the skeleton, various motions and contractions can be achieved. Experiments reveal that these muscles can contract over 90% of their initial lengths, generate stresses of ~600 kPa, and produce peak power densities over 2 kW/kg.
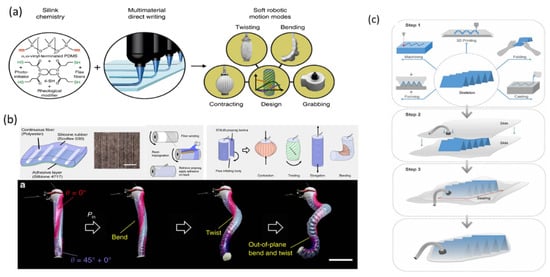
A soft robotic glove based on a fluid-driven actuator demonstrated assistance in the grasping movement of the hand [12]. Different actuation modes for the thumb and the rest of the fingers were applied to achieve a typical grasping movement ( Figure 2 b). Inspired by sheet-like biological muscles, the Zhu group presented a new family of soft actuators, named Fluidic Fabric Muscle Sheets (FFMS) [13]. The elastic tubes were stitched into fabric to achieve actuation by the movement of fluid in and out. By the design of the fluid route, these actuators exhibit multiple deformation. Through the application of textile technology, this type of actuator can be made into a micro execution unit, or can be developed as a large, meter-level actuator. Data shows that this type of actuator can withstand a force of more than 150 n, which is more than 115 times its weight, and up to 100% engineering strain ( Figure 2 c).

A major problem with pneumatic/hydraulic actuators is poor portability [15]. These actuators usually require a large fluid tank and assorted control units. In addition, the seal of the actuator is also a challenge [16]. Although they are made of soft materials, these actuators still contain some hard parts, which limit their applications. At the same time, their advantages are obvious. The actuation mechanism determines that these actuators are not limited by material. Through the integration of the control system and structure, pneumatic/hydraulic actuators can achieve very complex movements [17]. Fluid pressure can generate a greater driving force than other soft materials, which promise their applications for exoskeletons. Due to the maturity of the process technique, these actuators have been made into commercial products for daily use [18].
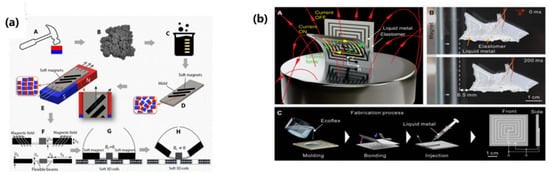
Recently, many scholars have studied a new structure of electromagnetic actuator that uses liquid metal instead of traditional copper as the coil for the electromagnetic actuator and is integrated into flexible materials. When the flexible coil is energized, it is driven by Lorentz force. This kind of structure has more degrees of freedom than traditional structures. For instance, Mao et al. [19] embedded liquid metals (69% gallium, 22% indium, 9% tin) into silicon elastomers to replace traditional metal coils as an actuator. The soft actuator is placed on the flat magnet, and the Lorentz force generated by different types of voltage signals makes the actuator move in different ways. They use actuators as fins, agitators, etc. to demonstrate their greater deformability ( Figure 3 b). Likewise, liquid metal coils made of Ga-In alloys are also used in soft electromagnetic actuators. The actuator that was composed of a liquid metal coil, and PDMS could reach a maximum displacement amplitude of 21.5 mm [20].
3. Outlook
Recent applications of wearable actuators are mainly concentrated in three categories: wearable robots, haptic devices, and personal thermal regulation textiles. Current orthosis robots are dominated by electric motors [22], which are high-output, stable, multifunctional, but also bulky, stiff, and inconvenient. In the future, these rigid electric motors will be gradually replaced by high-performance soft and smart materials, although they have a long way to go. For pneumatic and hydraulic actuators, research on the structure and functional design enables this type of actuator to achieve complex motions with simple strategies. Further, the efficiency of these actuators has been improved through the integration of motors, pumps and valves [23]. Recently, the combination of pneumatic and hydraulic actuators and textiles allows us to see new possibilities [13] which make the pneumatic/hydraulic wearable robots not limited to medical treatment and rehabilitation. With the emerging material science and technology, new smart materials enable the possibility of wearable robots, getting rid of bulky, rigid, and heavy equipment. Thermally driven materials such as shape memory alloys have problems such as high thermal hysteresis, high temperature, and high cost [24]. The actuation force of IPMCs, CNTs and CPs is too small, and it is difficult to make large-scale devices [22]. Among these new materials, DEAs are the most promising, due to fast response speed, high electromechanical performances, and high efficiency [22]. The research direction of reducing the operating voltage, improving the stability, and structure design of DEAs will be the mainstream. Wearable orthosis robots require high output force and precise control, especially for lower limb rehabilitation, which needs to be addressed in the future. Moreover, ideal combination of textile structure and smart materials for wearable robots is still a major challenge and we look forward to seeing more wearable assistive robots based on textile structures in the future.
Virtual and augmented reality (VR/AR) technology is a system that generates perceptual information through a computer and interacts with the real or virtual world. As the VR/AR technology evolves, the market demands matching or even better performance equipment. Haptic technology is an indispensable part of the VR/AR system. Wearable haptic devices mainly include three different methods: skin-attachable haptic interfaces, wearable haptic interfaces, and touch-based haptic interfaces [25]. Traditional haptic feedback is usually achieved by using the vibration motor such as the eccentric rotating mass (ERM) and linear resonant actuator (LRA) [25]. These actuators have the problems of poor portability and low resolution. Fine tactile feedback can be achieved through fine texture and tiny shapes, which makes soft actuators a potential alternative [25]. Soft actuators such as dielectric, electromagnetic, and piezoelectric actuators have been widely applied in this field. Future research is likely to take the advantage of soft materials to achieve multi-point stimulations and multi-shape generation [25]. Moreover, reducing the driving voltage and increasing the reliability of materials are also main research directions. Integration of haptic actuators and textiles into smart textiles to replace traditional tactile feedback devices is another potential for breakthrough of haptic technologies.
Thermal regulation textiles, as the first generation of smart textile, have been used in commerce and the market for decades [1]. These textiles are typically made of materials (nylon, wool, silk etc.) that can undergo expansion by moisture or heat. Through structural design such as twisting or chemical modification, these materials can passively respond to environmental stimuli. Future research may lie on the improvement of material performance and the design of the active regulation system.
Due to the advantages of programmability and comfort, textiles are very likely to be the main implementation method for wearable actuators. The new soft material has good compatibility with the textile structure. CNTs, shape memory alloys, and LCEs can be directly used as yarns for textile design. As an indispensable element of human life, textiles can also serve as a carrier of actuators. How to achieve actuation without affecting the original function of the textile is a problem that needs to be overcome.
4. Conclusions
In this review, we summarized the materials and structures that can be applied to wearable actuators including pneumatic and hydraulic actuators, shape memory alloys and polymers, thermal and hygroscopic materials, dielectric elastomers, ionic and conducting polymers, piezoelectric actuators, electromagnetic actuators, liquid crystal elastomers, etc. We have cited examples of wearable applications recently reported. These actuator applications are mainly concentrated in orthosis robots, haptic actuators, and smart textiles. There is no doubt that the application prospects of smart wearable actuators are wide, and the research of new soft actuator materials and structures is still in progress. The prospective future research directions for wearable actuators include: (1) smart materials with high performance, precise control, durable, and low cost; (2) integration of smart materials into textile structures to achieve required functions; (3) exploration of more applications for wearable actuators. We expect to see the application of wearable actuators that are comparable to biological structures in all aspects in the future.
References
- Persson, N.K.; Martinez, J.G.; Zhong, Y.; Maziz, A.; Jager, E.W.H. Actuating Textiles: Next Generation of Smart Textiles. Adv. Mater. Technol. 2018, 3, 1700397.
- Xiong, J.; Chen, J.; Lee, P.S. Functional Fibers and Fabrics for Soft Robotics, Wearables, and Human-Robot Interface. Adv. Mater. 2021, 33, 2002640.
- Fritz, H.; Patzer, D.; Galen, S.S. Robotic exoskeletons for reengaging in everyday activities: Promises, pitfalls, and opportunities. Disabil. Rehabil. 2019, 41, 560–563.
- Mun, S.; Yun, S.; Nam, S.; Park, S.K.; Park, S.; Park, B.J.; Lim, J.M.; Kyung, K.U. Electro-Active Polymer Based Soft Tactile Interface for Wearable Devices. IEEE Trans. Haptics 2018, 11, 15–21.
- Hu, J.; Meng, H.; Li, G.; Ibekwe, S.I. A review of stimuli-responsive polymers for smart textile applications. Smart Mater. Struct. 2012, 21, 053001.
- Suman, T. Shape Memory Polymers for Smart Textile Applications. In Textiles for Advanced Applications; Kumar, B., Thakur, S., Eds.; IntechOpen: London, UK, 2017.
- O’Halloran, A.; O’Malley, F.; McHugh, P. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 9.
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2018, 30, 1704407.
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Ruhs, P.A.; Coulter, F.; Studart, A.R. 3D printing of robotic soft actuators with programmable bioinspired architectures. Nat. Commun. 2018, 9, 878.
- Kim, S.Y.; Baines, R.; Booth, J.; Vasios, N.; Bertoldi, K.; Kramer-Bottiglio, R. Reconfigurable soft body trajectories using unidirectionally stretchable composite laminae. Nat. Commun. 2019, 10, 1–8.
- Li, S.; Vogt, D.M.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137.
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143.
- Zhu, M.; Do, T.N.; Hawkes, E.; Visell, Y. Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics. Soft Robot. 2020, 7, 179–197.
- Park, J.; Choi, J.; Kim, S.J.; Seo, K.-H.; Kim, J. Design of an Inflatable Wrinkle Actuator With Fast Inflation/Deflation Responses for Wearable Suits. IEEE Robot. Autom. Lett. 2020, 5, 3799–3805.
- Shepherd, R.F.; Stokes, A.A.; Freake, J.; Barber, J.; Snyder, P.W.; Mazzeo, A.D.; Cademartiri, L.; Morin, S.A.; Whitesides, G.M. Using Explosions to Power a Soft Robot. Angew. Chem. Int. Ed. 2013, 52, 2892–2896.
- Unger, M.A. Monolithic Microfabricated Valves and Pumps by Multilayer Soft Lithography. Science 2000, 288, 113–116.
- Dzahir, M.; Yamamoto, S.-I. Recent Trends in Lower-Limb Robotic Rehabilitation Orthosis: Control Scheme and Strategy for Pneumatic Muscle Actuated Gait Trainers. Robotics 2014, 3, 120–148.
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3.
- Mao, G.; Drack, M.; Karami-Mosammam, M.; Wirthl, D.; Stockinger, T.; Schwödiauer, R.; Kaltenbrunner, M. Soft electromagnetic actuators. Sci. Adv. 2020, 6, eabc0251.
- Guo, R.; Sheng, L.; Gong, H.; Liu, J. Liquid metal spiral coil enabled soft electromagnetic actuator. Sci. China Technol. Sci. 2018, 61, 516–521.
- Do, T.N.; Phan, H.; Nguyen, T.-Q.; Visell, Y. Miniature Soft Electromagnetic Actuators for Robotic Applications. Adv. Funct. Mater. 2018, 28, 1800244.
- Veale, A.J.; Xie, S.Q. Towards compliant and wearable robotic orthoses: A review of current and emerging actuator technologies. Med. Eng. Phys. 2016, 38, 317–325.
- Scheidl, R.; Winkler, B.; Kogler, H.; Ladner, P.; Haas, R.; Lukachev, E. Digital Fluid Technologies for the Steel Industry. BHM Berg Hüttenmännische Mon. 2016, 161, 504–509.
- Stachiv, I.; Alarcon, E.; Lamac, M. Shape Memory Alloys and Polymers for MEMS/NEMS Applications: Review on Recent Findings and Challenges in Design, Preparation, and Characterization. Metals 2021, 11, 415.
- Yang, T.-H.; Kim, J.R.; Jin, H.; Gil, H.; Koo, J.-H.; Kim, H.J. Recent Advances and Opportunities of Active Materials for Haptic Technologies in Virtual and Augmented Reality. Adv. Funct. Mater. 2021, 2008831.


