 +1 credit
+1 credit
| Version | Summary | Created by | Modification | Content Size | Created at | Operation |
|---|---|---|---|---|---|---|
| 1 | Gustave Udahemuka | + 2783 word(s) | 2783 | 2020-05-05 23:52:10 | | | |
| 2 | Gustave Udahemuka | + 1 word(s) | 2784 | 2020-05-12 03:02:50 | | | | |
| 3 | Lily Guo | -18 word(s) | 2766 | 2020-10-28 10:42:13 | | | | |
| 4 | Gustave Udahemuka | Meta information modification | 2766 | 2020-12-06 21:14:15 | | |
Video Upload Options
Detection of an active wildfire in a satellite image scene relies on an accurate estimation of the background temperature of the scene, which must be compared to the observed temperature, to decide on the presence of fire. The expected background temperature of a pixel is commonly derived based on spatial-contextual information. Multi-temporal information and multi-spectral information have also been exploited in estimation of the background temperature of a pixel. This review discusses different approaches of estimation of background temperature and highlights the potentiality of the estimation of the background temperature using the multi-temporal data for early fire detection and real-time fire monitoring. The perspectives of a proposed multi-temporal approach are also outlined.
1. Introduction
Data acquired from satellite sensors are widely used in the automatic detection of active wildfires. Fire detection techniques supported by such data provide the most feasible and practical means for the detection and continuous monitoring of regional and global fire activities [1]. Though data used in the design of satellite-based fire detection have been acquired from sensors onboard Low Earth Orbit (LEO) systems (mainly polar satellites) and onboard Geostationary Earth Orbit (GEO) satellites, the thermal imagery data obtained from the global system of GEO sensors are the most appropriate satellite-based data for early fire detection in the non-polar regions of the earth. In near future, data acquired from the thermal sensors on inclined highly elliptical orbits (HEOs), such as Molniya and Tundra orbits, will also provide data on temporal resolution scale same as GEO. The devastating effects of wildfires on land, atmosphere, flora, and fauna can be mitigated when wildfire outbreaks are timely detected to enable early interventions.
In thermal-based fire detection, satellites have relied on images received from the fire-sensitive Mid-Infrared (MIR) spectral window (i.e., 3−5 mm spectral range) to distinguish fire and non-fire pixels. This spectral region is highly sensitive to temperatures of subpixel vegetation fires and is less affected by solar reflections than the Shortwave Infrared (SWIR) spectral window. A pixel in a satellite image is directly or implicitly flagged as a fire pixel when the pixel’s observed temperature is significantly higher than its expected background temperature – the latter defined as the expected temperature of a pixel under non-fire condition. The first satellite-based remote sensing techniques for hotspot detection were developed using data from the LEO systems. Given the LEO system’s high spatial resolution advantage, the expected background temperature was extracted from spatial-contextual information (for example, see [2][3][4][5][6][7]). A pixel’s expected background temperature can also be estimated using a multi-temporal model for the evolution of a pixel’s temperature. It can also be defined using multispectral information either by assuming that the temperatures derived from the fire-sensitive MIR spectral window channel and temperatures derived from the earth surface-sensitive Long-wave IR (LWIR) spectral window channel during non-fire conditions are correlated or by performing spectral unmixing [8][9]. Since GEO fire-sensitive MIR data were available, most GEO-based fire detection techniques were conceived by adapting the pre-existing LEO methods on GEO data. These techniques used the same spatial-contextual information to define the expected pixel’s background temperature during fire detection [10][11][12][13][14] or fire confirmation [15][16][17]. A spatial-contextual mechanism has its drawbacks, such as Point Spread Function (PSF) effect, spatial heterogeneity, and undetected cloud-contaminated pixels that contribute to both omission and commission errors [1][18][19]. The performance of such techniques is also restricted by the low spatial resolution of GEO data. GEO sensors have a high temporal resolution, and exploiting the high temporal resolution enhances the chance of detecting a fire at ignition. Given that fires are generally small when started, the high-temporal data can then allow the detection of small and low-power fire events, typically only possible with the LEO system [20][21][22].
2. Multi-temporal Fire Detection Algorithms
Multi-temporal fire detection algorithms define the expected pixel’s background brightness temperature in MIR in different ways. The detection statistic termed intensity index [23][24] defines the pixel’s expected background temperature as the mean of observed temperatures at the same time of the day and month of the year. Likewise, the temporal test for fire confirmation proposed by [17] defines the pixel’s expected background temperature as the mean at same time of the day in a series of thirty days, and the temporal test in the fire detection method proposed by [25][26] that exploits the polar-orbiting NOAA-AVHRR MIR spectral channel, is determined as the mean of the brightness temperatures over a number of days prior to the inspected day. The change detection algorithm proposed by [27][28] defines the expected difference between a pixel’s background temperature and an auxiliary temperature at the current time as the difference of observed brightness temperature and auxiliary temperature at an anterior non-fire time. The time to an anterior time can be fixed to the minimum time between successive images up to and not exceeding twenty-four hours, and the auxiliary temperatures are modeled as temperatures that represent the natural evolution of temperatures and can be among others, non-fire atmospherically corrected temperatures of the current day or previously observed DTC with no cloud or fire-contaminated samples. In computation of a detection statistic named ‘time differential index’, a fire detection method proposed by [24] predicts the expected difference between a pixel location’s background temperature at the current time to its background temperature at a previous time – the previous time and the current time are at the same time of the day and month of the year. Instances of cloud cover or missing samples in the available data up to the inspection time hinder the derivation of the expected background temperature in these multi-temporal fire detection methods. The problem can be solved by interpolating the invalid values due to cloud cover or fire events. The interpolation is achievable by fitting available valid brightness temperatures to a physics-based or data-driven DTC model to produce the expected DTC of the current day of a pixel location that can be used to define the expected background temperature at an inspection time. Given the presence in observed temperatures at Top of the Atmosphere (TOA) of outliers, mainly cloud or fire-contaminated samples, the fitting can be undertaken by first detecting and removing outliers. However, instances of missed detection of clouds or fire events negatively affect the results of the estimation of the expected background temperatures. Another option is to use methods from robust statistics to avoid the need for screening outliers from the data. A robust fit of a DTC model on past observed DTCs has been used to represent a pixel’s background temperature [29][30][31]. Some fire detection techniques apply, in one of their multiple tests, a dynamic threshold on observed MIR brightness temperature, and the threshold varies with the solar zenith angle [15][28][32]. This dynamic threshold that is also used by the current version (i.e., the third version) of the EUMETSAT FIR product [13][33], implicitly represents the pixel’s background temperature dynamics. Similar to the robust fit on previous DTCs, the dynamic threshold avoids the influence of both cloud and missed fire events on the result of the fire detection, but does not consider the particularity of a day: the dynamic threshold does not change with the day, and the robust fit on previous DTCs assumes that the previous days define the whole of the current day. To include all past temporal information on a pixel when deriving its expected brightness temperature, methods based on recursive Bayesian estimation adjust the expected brightness temperature of a pixel each time new information becomes available. The background temperature is derived by a Kalman filter-based prediction using one of the physics-based or data-driven DTC models as the forecast model that determines the time evolution of the background temperature [29][34][35][36]. The new valid observed brightness temperature, when available, is assimilated into the background temperature model.
The expected background temperature can also incorporate both multi-temporal and spatial information. For example, the spatial differential index proposed by [24], regressing the inspected image in the current scene on a number of past images of the scene [37][38], expected background temperature of a pixel as a convex combination of a spatial-contextual estimate and a temporal estimate [39], and a fire detection method proposed by [40] determines the expected rise of a pixel’s background radiance with respect to its neighborhood’s background temperature from a recent image, acquired at the same time of the day, of a non-fire condition on the pixel location and its neighbors. The background temperature can also be derived from information extracted from both multi-temporal and multi-spectral information. For example, the method proposed by [41] predicts MIR background temperature from the earth sensitive LWIR temperature using a linear relation derived from the principal components of a temporal sequence of non-fire MIR and LWIR brightness temperatures.
The current multi-temporal fire detection methods based on recursive Bayesian estimation, first derive the expected DTC of a day (i.e., the model of a day) online before the start of the day and data are assimilated at observation time into the expected DTC. The derivation of the expected DTC of a day allows only for the inclusion of recent observed DTCs with a short period of invalid data (cloud or fire-contaminated data or missing data) into the training set but observed DTCs with a long period of invalid data are not included. The model of a day is also expected to change with land cover (or land use) change, season, and even weather. Given that the model of a day is derived from previously observed DTCs, the required number of recent valid DTCs to include in the training set might not be available for a given period of no change in a pixel location. This approach, therefore, does not adapt rapidly to non-fire change on land or in the atmosphere, for example, in the aftermath of a fire on a pixel location. With the aim of rapid adaptation to normal change, a proposed method derives the background temperature by assimilating data into the model of DTC’s parameters of a pixel location each time valid observations are available to estimate the vector of the best DTC model parameters, which is the initial value of the forecast. The ensemble forecasting approach is applied from the data assimilation time for a skillful forecast that is used to determine the expected background temperatures of a pixel location onward. Two types of data are assimilated into the model of the DTC parameters at each data assimilation cycle, namely, the observed TOA brightness temperatures derived from the MIR window data and the observed offsets of the thermal sunrise (i.e., the start time of a DTC) of a day to the sunrise of the same day. The latter is assimilated to transition from one DTC to the subsequent DTC.
A proposed fire detection method achieves an early active fire detection by subtracting the observed temperature from the expected background temperature to obtain the prediction residual at an inspection time in a given pixel location. The residual value is compared to an adaptive threshold computed using a Constant False Alarm Rate (CFAR) framework to decide whether the pixel location is burning. To produce a smooth continuous data assimilation result in the temporal dimension, three data assimilation methods – each offering different assimilation advantages – were separately used. A variational data assimilation method, which emulates the weak-constraint Four-Dimensional Variational Assimilation (4D-Var) and is implemented only in the time dimension (one-dimensional analysis), performs a point estimation of the posterior. Two sequential data assimilation methods, namely the classical Ensemble Kalman Filter (EnKF) and Sampling Importance Resampling (SIR) particle filter, estimate the posterior probability density function. The three methods are compared in terms of detection performance that depends on their ability to estimate the dynamics of the background brightness temperatures. The expected background brightness temperature is the observational forecast determined through model integration from the initial state and defined at a given False Alarm Rate (FAR). Observational forecasts are assumed to be uncorrelated across spatial and temporal dimensions, and the same for real observations. The observational forecasts and real observations are also assumed uncorrelated, and as result, each pixel is assessed independently from its neighbors and only the temporal dimension used to compute the expected background temperature.
The proposed method has less computational complexity in terms of time than methods that rely on fitting past observations to a DTC model to determine the expected background temperature [29][31][34][35][36]. The computation time is reduced because the model fits are only required when the proposed detection system is launched to determine the initial values at launch. The proposed method is expected to achieve higher accuracy than that of other temporal fire detection methods because the estimation of background temperature is based even on the most recent non-fire observation without relying on the expected DTC of a day, and the detection uses a CFAR threshold to adapt to any non-fire condition in a single pixel location and to adapt to any region. Since the MIR spectral window is affected by solar reflections, cloud cover increases both omission and commission errors. Cloud detection and the masking of cloud-contaminated samples are usually undertaken as a pre-processing step, and fire detection results depend then on the accuracy and detection threshold of the cloud detection mechanism of choice. No step is taken to clear cloud samples from data in this proposed algorithm. The potential improvement to the proposed method includes the assimilation of data in more dimensions than just the temporal dimension and the assimilation of more types of data to better characterize the background temperature dynamics under cloud cover. The identification of a water body is implemented as a post-processing step. This is done to set water body pixels, which might have been falsely classified as fire or undecided, to a non-fire status.
GEO satellite temporal MIR data are assimilated into the model of DTC parameters of a pixel to describe non-fire background temperature dynamics to aid the early detection of wildfires. Temporal information incorporates land surface characteristics, but to also consider the weather and atmosphere, a combination of temporal, spatial, and spectral information must be assimilated into the background temperature model of a pixel. The figure below shows an example of the fire detection at 10-3.5 FAR that uses the 4D-Var with an assimilation window length equal to 6 samples to assimilate brightness temperatures acquired from the GEO sensor the Meteosat Second Generation (MSG)-SEVIRI into a DTC model[42]. Data correspond to an MSG pixel location whose center is at (25.02590 S, 31.27840 E). The sensor MODIS observes the pixel location four times a day. The MODIS MOD14/MYD14 fire product reports fire in the two DTCs of the examined MSG pixel location shown in the figure below on 2 August 2007 at 11:45 (six MODIS fire pixels whose centers fall in the MSG pixel, all with high detection confidence); and in the outer window of a 3 x 3 pixel array around the examined MSG pixel, on 2 August 2007, at 11:45 and during times of all MODIS night overpasses, and on 3 April 2007 during times of morning overpasses of both Terra and Aqua. A fire product that reports MSG fire pixels, namely EUMETSAT FIR, reports the fire in the pixel on 2 August 2007, first at 10:30 (reports the fire before Aqua overpass, i.e., before MODIS MOD14/MYD14 report) as a low-confidence fire event (i.e., possible fire), thereafter it reports probable (high confidence) fire events at 10:45, 13:45, 15:30, 16:30, 16:45, and 19:45 during the duration of the fire activity in the time frame shown in the figure below. In a 5 x 5 MSG pixel array around the examined pixel location, no MODIS MOD14/MYD14 fire reports before 11:45 and no EUMETSAT FIR fire reports before 09:45 on 2 August 2007. By assuming a single ignition time for the fire events of 2 August 2007 in the examined pixel, the fire detection at 10-3.5 FAR that uses the 4D-Var with an assimilation length equal to 6 for the analysis (results shown below) detected the fire ignition at the same time reported by EUMETSAT FIR fire product at 10:30. An example where the proposed algorithm detects the fire ignition at the same time as the EUMETSAT FIR report and at the time before MODIS MOD14/MYD14 report. The proposed method continues in this case to report fire uninterrupted while EUMETSAT FIR fire product misses some fire events. Noting that, on 1 August 2007 in a 5 x 5 array around the examined pixel, no fire was reported either by by EUMETSAT FIR report or MODIS MOD14/MYD14 report.
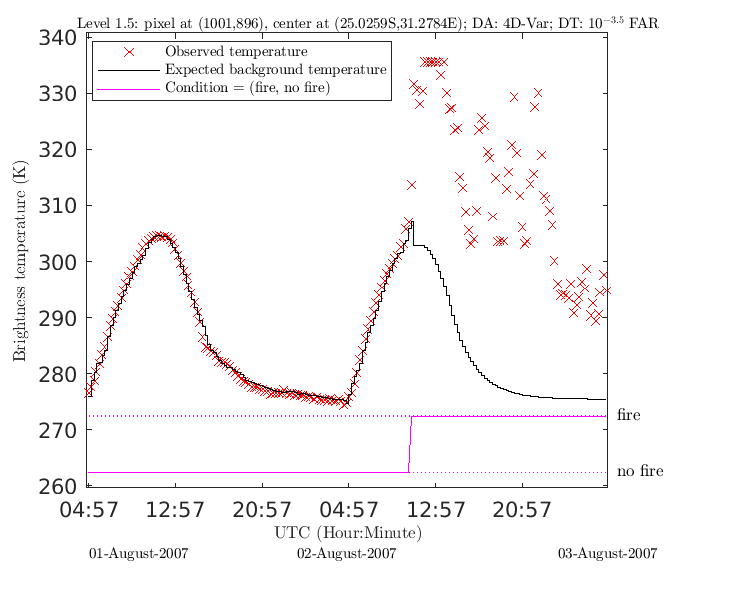
This figure serves as the graphical abstract of the manuscript accepted for publication in MDPI Remote Sensing journal. The texts in this review are mainly from the Introduction section of the same manuscript with few additions. All MSG Data © 2007 and 2020 EUMETSAT.
References
- Jesus San-Miguel-Ayanz; Nicolas Ravail; Active Fire Detection for Fire Emergency Management: Potential and Limitations for the Operational Use of Remote Sensing. Natural Hazards 2005, 35, 361-376, 10.1007/s11069-004-1797-2.
- Matson, M.; Dozier, J; Identification of subresolution high temperature sources using a thermal IR sensor. Photogrammetric Engineering and Remote Sensing 1981, 47, 1311-1318.
- Thomas F. Lee; Paul M. Tag; Improved Detection of Hotspots using the AVHRR 3.7-um Channel. Bulletin of the American Meteorological Society 1990, 71, 1722-1730, 10.1175/1520-0477(1990)071<1722:idohut>2.0.co;2.
- S. P. Flasse; P. Ceccato; A contextual algorithm for AVHRR fire detection. International Journal of Remote Sensing 1996, 17, 419-424, 10.1080/01431169608949018.
- Yoram J. Kaufman; Chris Justice; Luke P. Flynn; Jackie D. Kendall; Elaine M. Prins; Louis Giglio; Darold E. Ward; W. Paul Menzel; Alberto W. Setzer; Potential global fire monitoring from EOS-MODIS. Journal of Geophysical Research 1998, 103, 32215-32238, 10.1029/98jd01644.
- L. Giglio; J. D. Kendall; R. Mack; A multi-year active fire dataset for the tropics derived from the TRMM VIRS. International Journal of Remote Sensing 2003, 24, 4505-4525, 10.1080/0143116031000070283.
- Boris Zhukov; E. Lorenz; Dieter Oertel; M. Wooster; G. Roberts; Spaceborne detection and characterization of fires during the bi-spectral infrared detection (BIRD) experimental small satellite mission (2001–2004). Remote Sensing of Environment 2006, 100, 29-51, 10.1016/j.rse.2005.09.019.
- E. Cisbani; A. Bartoloni; M. Marchese; G. Efisei; A. Salvati; Early fire detection system based on multi-temporal images of geostationary and polar satellites. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS) 2002, 3, 1506-1508, 10.1109/igarss.2002.1026163.
- M. Costantini; M. Zavagli; Evaristo Cisbani; B. Greco; A Technique for Automatic Fire Detection from Geostationary Optical Sensors and its Validation on MSG SEVIRI Data. Proceedings of the IEEE International Symposium on Geoscience and Remote Sensing (IGARSS) 2006, #, 4153-4156, 10.1109/igarss.2006.1065.
- E. M. Prins; W. Paul Menzel; Geostationary satellite detection of bio mass burning in South America. International Journal of Remote Sensing 1992, 13, 2783-2799, 10.1080/01431169208904081.
- Elaine M. Prins; W. Paul Menzel; Trends in South American biomass burning detected with the GOES visible infrared spin scan radiometer atmospheric sounder from 1983 to 1991. Journal of Geophysical Research 1994, 99, 16719, 10.1029/94jd01208.
- EUMETSAT. Active fire monitoring with MSG - Algorithm theoretical basis document, 1 ed., 2007. Document number: EUM/MET/REP/07/0170, Version1.
- EUMETSAT. MSG Meteorological Products Extraction Facility Algorithm Specification Document, v5 ed., 2009. Document number: EUM/MSG/SPE/022.
- Guang Xu; Xu Zhong; Real-time wildfire detection and tracking in Australia using geostationary satellite: Himawari-8. Remote Sensing Letters 2017, 8, 1052-1061, 10.1080/2150704X.2017.1350303.
- Gareth J. Roberts; Martin J. Wooster; Fire Detection and Fire Characterization Over Africa Using Meteosat SEVIRI. IEEE Transactions on Geoscience and Remote Sensing 2008, 46, 1200-1218, 10.1109/tgrs.2008.915751.
- Malik Amraoui; Carlos C. Dacamara; José Miguel Cardoso Pereira; Detection and monitoring of African vegetation fires using MSG-SEVIRI imagery. Remote Sensing of Environment 2010, 114, 1038-1052, 10.1016/j.rse.2009.12.019.
- Zhengyang Lin; Fang Chen; Bin Li; Bo Yu; Huicong Jia; Meimei Zhang; Dong Liang; A Contextual and Multitemporal Active-Fire Detection Algorithm Based on FengYun-2G S-VISSR Data. IEEE Transactions on Geoscience and Remote Sensing 2019, 57, 8840-8852, 10.1109/tgrs.2019.2923248.
- Abel Calle; J. -L. Casanova; F. Gonzalez-Alonso; Impact of point spread function of MSG-SEVIRI on active fire detection. International Journal of Remote Sensing 2009, 30, 4567-4579, 10.1080/01431160802609726.
- Bryan Hally; Luke Wallace; Karin Reinke; Simon Jones; Chermelle Engel; Andrew K. Skidmore; Estimating Fire Background Temperature at a Geostationary Scale—An Evaluation of Contextual Methods for AHI-8. Remote Sensing 2018, 10, 1368, 10.3390/rs10091368.
- Wilfrid Schroeder; Elaine Prins; Louis Giglio; I.A. Csiszar; Christopher Schmidt; Jeffrey Morisette; Douglas Morton; Validation of GOES and MODIS active fire detection products using ASTER and ETM+ data. Remote Sensing of Environment 2008, 112, 2711-2726, 10.1016/j.rse.2008.01.005.
- Wilfrid Schroeder; Jeffrey T. Morisette; Ivan Csiszar; Louis Giglio; Douglas Morton; Christopher O. Justice; Characterizing Vegetation Fire Dynamics in Brazil through Multisatellite Data: Common Trends and Practical Issues. Earth Interactions 2005, 9, 1-26, 10.1175/ei120.1.
- Jeffrey S. Reid; Edward Hyer; Elaine M. Prins; Douglas L. Westphal; Jianglong Zhang; Jun Wang; Sundar A. Christopher; Cynthia A. Curtis; Christopher C. Schmidt; Daniel P. Eleuterio; et al.Kim A. RichardsonJay Hoffman Global Monitoring and Forecasting of Biomass-Burning Smoke: Description of and Lessons From the Fire Locating and Modeling of Burning Emissions (FLAMBE) Program. Impact on Sea-Surface Electromagnetic Scattering and Emission Modeling of Recent Progress on the Parameterization of Ocean Surface Roughness, Drag Coefficient and Whitecap Coverage in High Wind Conditions 2009, 2, 144-162, 10.1109/jstars.2009.2027443.
- Giuseppe Mazzeo; Francesco Marchese; Carolina Filizzola; Nicola Pergola; Valerio Tramutoli; A Multi-temporal Robust Satellite Technique (RST) for Forest Fire Detection. Proceedings of the International Workshop on the Analysis of Multi-temporal Remote Sensing Images 2007, #, 1-6, 10.1109/multitemp.2007.4293060.
- Carolina Filizzola; Rosita Corrado; Francesco Marchese; Giuseppe Mazzeo; Rossana Paciello; Nicola Pergola; Valerio Tramutoli; RST-FIRES, an exportable algorithm for early-fire detection and monitoring: Description, implementation, and field validation in the case of the MSG-SEVIRI sensor. Remote Sensing of Environment 2017, 192, e2-e25, 10.1016/j.rse.2017.01.019.
- V. Cuomo; R. Lasaponara; Valerio Tramutoli; Evaluation of a new satellite-based method for forest fire detection. International Journal of Remote Sensing 2001, 22, 1799-1826, 10.1080/01431160120827.
- R. Lasaponara; Vincenzo Cuomo; Maria Macchiato; Tiziana Simoniello; A self-adaptive algorithm based on AVHRR multitemporal data analysis for small active fire detection. International Journal of Remote Sensing 2003, 24, 1723-1749, 10.1080/01431160210144723.
- G. Laneve; M. M. Castronuovo; E. G. Cadau; Continuous Monitoring of Forest Fires in the Mediterranean Area Using MSG. IEEE Transactions on Geoscience and Remote Sensing 2006, 44, 2761-2768, 10.1109/TGRS.2006.881716.
- Valeria Di Biase; Giovanni Laneve; Geostationary Sensor Based Forest Fire Detection and Monitoring: An Improved Version of the SFIDE Algorithm. Remote Sensing 2018, 10, 741, 10.3390/rs10050741.
- G. Roberts; Martin J. Wooster; Development of a multi-temporal Kalman filter approach to geostationary active fire detection & fire radiative power (FRP) estimation. Remote Sensing of Environment 2014, 152, 392-412, 10.1016/j.rse.2014.06.020.
- Bryan Hally; Luke Wallace; Karin Reinke; Simon Jones; A Broad-Area Method for the Diurnal Characterisation of Upwelling Medium Wave Infrared Radiation. Remote Sensing 2017, 9, 167, 10.3390/rs9020167.
- Bryan Hally; Luke Wallace; Karin Reinke; Simon Jones; Andrew K. Skidmore; Advances in active fire detection using a multi-temporal method for next-generation geostationary satellite data. International Journal of Digital Earth 2018, 12, 1030-1045, 10.1080/17538947.2018.1497099.
- W. Xu; Martin J. Wooster; G. Roberts; P. Freeborn; New GOES imager algorithms for cloud and active fire detection and fire radiative power assessment across North, South and Central America. Remote Sensing of Environment 2010, 114, 1876-1895, 10.1016/j.rse.2010.03.012.
- Joro, S.; Lutz, H.J.; van de Berg, L.; Yildirim, A.; Samain, O. Towards an improved Active Fire Monitoring Product for MSG satellites. EUMETSAT Meteorological Satellite Conference, 2008.
- F. Van Den Bergh; P.E. Frost; A multi temporal approach to fire detection using MSG data. Proceedings of the International Workshop on the Analysis of Multi-Temporal Remote Sensing Images. 2005, #, 156-160, 10.1109/amtrsi.2005.1469861.
- F. Van Den Bergh; G. Udahemuka; B. J. Van Wyk; Potential fire detection based on Kalman-driven change detection. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2009, 4, IV-77-IV-80, 10.1109/igarss.2009.5417370.
- Zixi Xie; Weiguo Song; Rui Ba; Xiaolian Li; Long Xia; A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data. Remote Sensing 2018, 10, 1992, 10.3390/rs10121992.
- Alexander Koltunov; S.L. Ustin; Early fire detection using non-linear multitemporal prediction of thermal imagery. Remote Sensing of Environment 2007, 110, 18-28, 10.1016/j.rse.2007.02.010.
- Alexander Koltunov; Susan L. Ustin; Brad Quayle; Brian Schwind; Vincent G. Ambrosia; Wei Li; The development and first validation of the GOES Early Fire Detection (GOES-EFD) algorithm. Remote Sensing of Environment 2016, 184, 436-453, 10.1016/j.rse.2016.07.021.
- Lei Lin; Yu Meng; Anzhi Yue; Yuan Yuan; Xiaoyi Liu; Jingbo Chen; Mengmeng Zhang; Jiansheng Chen; A Spatio-Temporal Model for Forest Fire Detection Using HJ-IRS Satellite Data. Remote Sensing 2016, 8, 403, 10.3390/rs8050403.
- Chathura H. Wickramasinghe; Simon Jones; Karin Reinke; Luke Wallace; Development of a Multi-Spatial Resolution Approach to the Surveillance of Active Fire Lines Using Himawari-8. Remote Sensing 2016, 8, 932, 10.3390/rs8110932.
- Zhengyang Lin; Fang Chen; Zheng Niu; Bin Li; Bo Yu; Huicong Jia; Meimei Zhang; An active fire detection algorithm based on multi-temporal FengYun-3C VIRR data. Remote Sensing of Environment 2018, 211, 376-387, 10.1016/j.rse.2018.04.027.
- van den Bergh, F.; van Wyk, M.A.; van Wyk, B.J. A comparison of data-driven and model-driven approaches to brightness temperature diurnal cycle interpolation. Proceedings of the 17th Symposium of the Pattern Recognition Association of South Africa, 2006, pp. 252–256.


