Operation with micrometric size objects requires a change in the entire paradigm in manipulation equipment and particularly in the field of related actuators. Microactuators have low energy efficiency compared to the devices of macroscale. The dimensions of these drives are so small that standard kinematic arrangement is not applicable. On the other hand, the small size allows the use of lower mechanical parameters materials due to the dimensional limits of the micromechanisms. With the development of the biological industry, these actuators became a key for living cell positioning, high-speed microscopy, and other micro-scale technologies. New emerging transducer materials such as magnetic nanoparticles, metallic nanoparticles, expandable micro-spheres, and conductive polymers can be used for the design of micro-scale sensors and actuators. Despite the used materials, the surface effects and inter-molecular interactions are important in micro-scale; in nanoscale, these phenomena become essential. Micro/nanoelectromechanical systems (MEMSs/NEMSs) with electrostatic drives have fast response, are power efficient, and fit well for micro- and nanopositioning. Drive operating voltage, response speed, operating stroke, generated force, and the accumulated amount of energy define these actuators’ application area. The electrostatic actuators suffer from the pull-in phenomenon (loss of the equilibrium between attractive and repulsive forces), limiting their performance. This limitation could be overcome by developing actuators based on repulsive force or electrostatic levitation.
- micrometric actuators
- electrostatic actuators
- conducting polymers
1. Operating Modes
1.1. Attractive vs. Repulsive Force
1.2. Electrostatic Levitation
2. Design
2.1. Parallel-Plate Drives
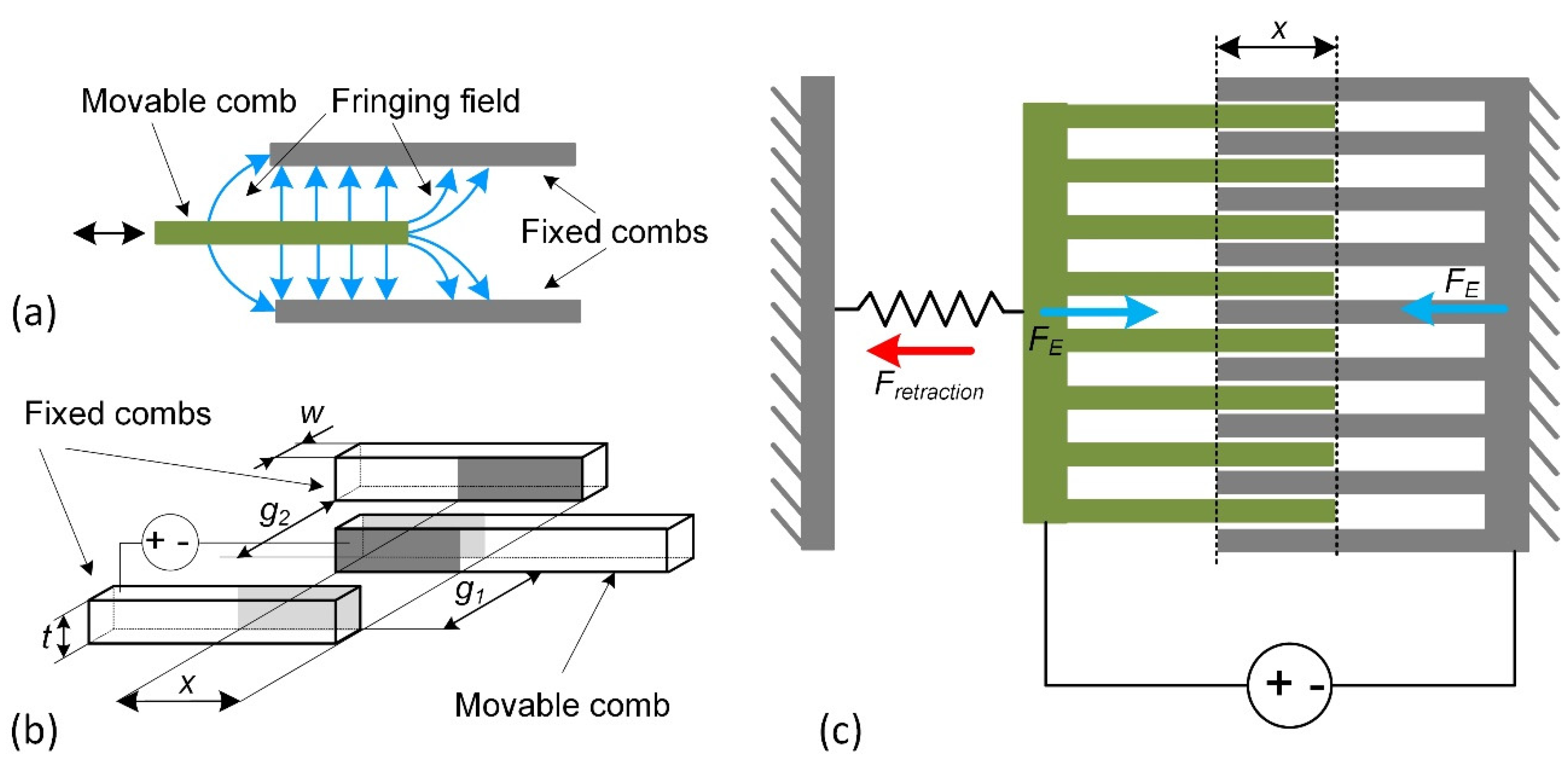
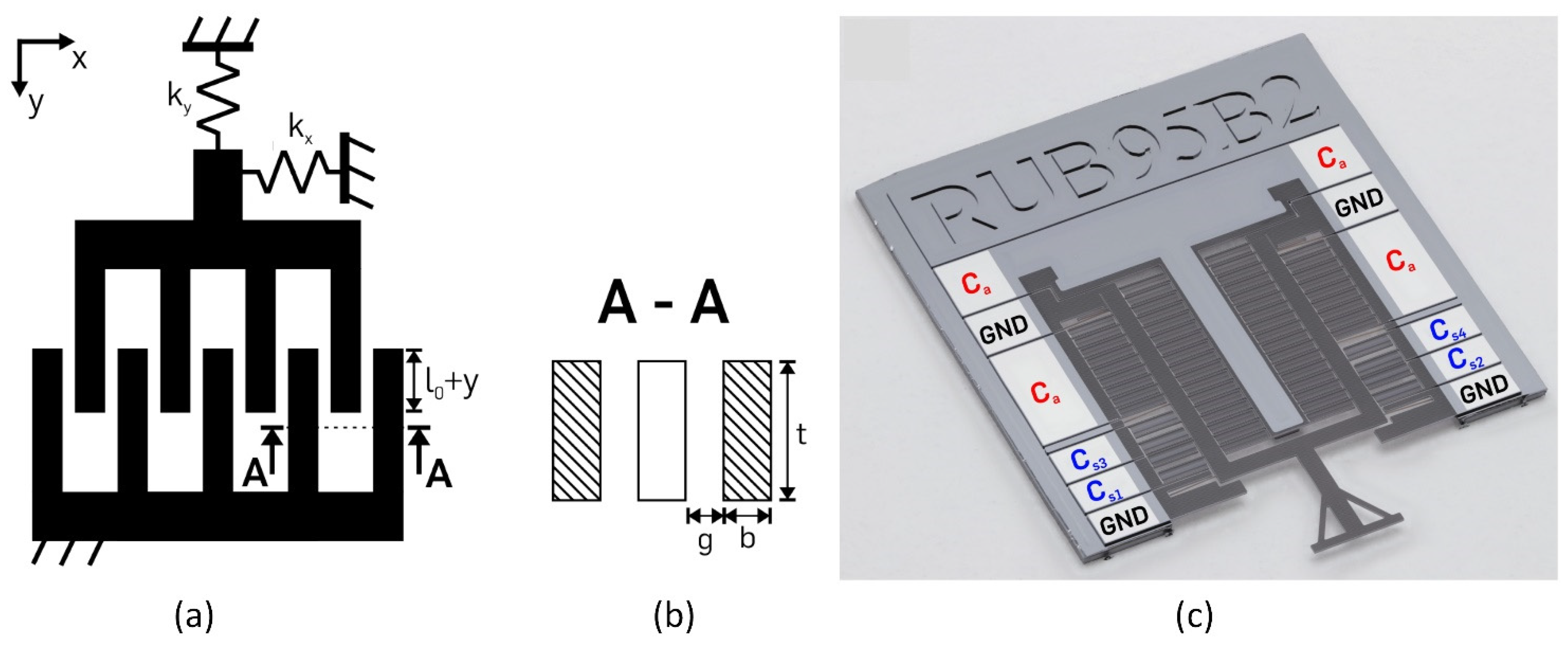
2.2. Comb-Drive Actuators
2.3. Scratch-Drive Actuator
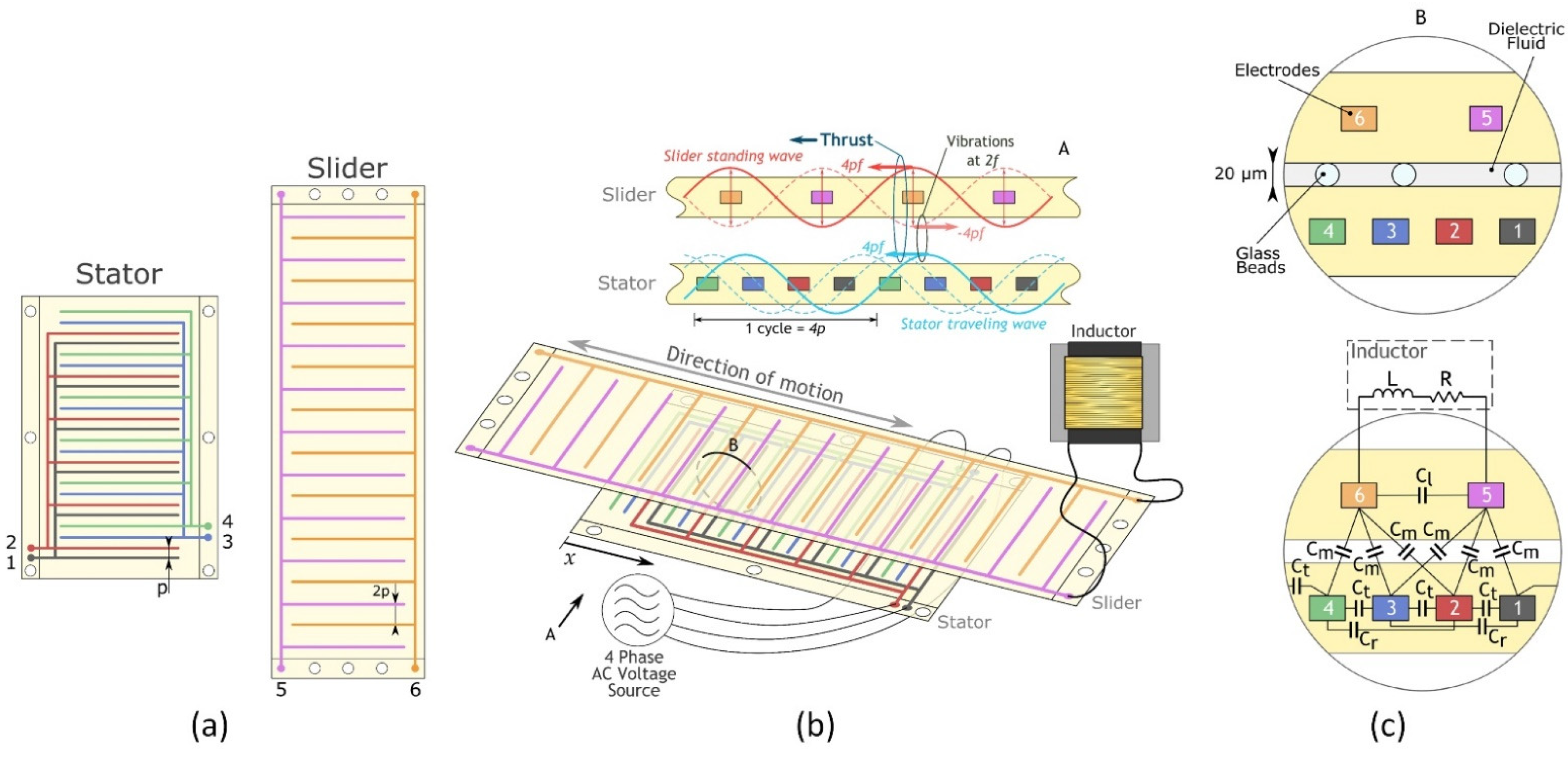
2.4. Rotary Actuators
3. Applications
This entry is adapted from the peer-reviewed paper 10.3390/mi13081256
References
- Ozdogan, M.; Daeichin, M.; Ramini, A.; Towfighian, S. Parametric resonance of a repulsive force MEMS electrostatic mirror. Sens. Actuators A Phys. 2017, 265, 20–31.
- Rosa, M.A.; De Bruyker, D.; Völkel, A.R.; Peeters, E.; Dunec, J. A novel external electrode configuration for the electrostatic actuation of MEMS based devices. J. Micromech. Microeng. 2004, 14, 446.
- Qiao, D.-Y.; Yuan, W.-Z.; Li, X.-Y. A two-beam method for extending the working range of electrostatic parallel-plate micro-actuators. J. Electrost. 2007, 65, 256–262.
- Chiou, J.C.; Lin, Y.J. A novel large displacement electrostatic actuator: Pre-stress comb-drive actuator. J. Micromech. Microeng. 2005, 15, 1641.
- Schaler, E.W.; Zohdi, T.I.; Fearing, R.S. Thin-film repulsive-force electrostatic actuators. Sens. Actuators A Phys. 2018, 270, 252–261.
- Zamanzadeh, M.; Azizi, S. Static and dynamic characterization of micro-electro-mechanical system repulsive force actuators. J. Vib. Control 2020, 26, 1216–1231.
- Schaler, E.W.; Jiang, L.; Lee, C.; Fearing, R.S. Bidirectional, Thin-Film Repulsive-/Attractive-Force Electrostatic Actuators for a Crawling Milli-Robot. In Proceedings of the MARSS 2018—International Conference on Manipulation, Automation and Robotics at Small Scales, Nagoya, Japan, 4–8 July 2018; Institute of Electrical and Electronics Engineers Inc.: New York City, NY, USA, 2018.
- Poletkin, K. On the static pull-in of tilting actuation in electromagnetically levitating hybrid micro-actuator: Theory and experiment. Actuators 2021, 10, 256.
- Poletkin, K.V.; Asadollahbaik, A.; Kampmann, R.; Korvink, J.G. Levitating micro-actuators: A review. Actuators 2018, 7, 17.
- Pallay, M.; Towfighian, S. A reliable MEMS switch using electrostatic levitation. Appl. Phys. Lett. 2018, 113, 213102.
- Pallay, M.; Ibrahim, A.I.; Miles, R.N.; Towfighian, S. Pairing electrostatic levitation with triboelectric transduction for high-performance self-powered MEMS sensors and actuators. Appl. Phys. Lett. 2019, 115, 133503.
- Pallay, M.; Towfighian, S. A Combined MEMS Threshold Pressure Sensor and Switch. In Proceedings of the 2019 IEEE Sensors, Montreal, QC, Canada, 27–30 October 2019.
- Pallay, M.; Miles, R.N.; Towfighian, S. Merging parallel-plate and levitation actuators to enable linearity and tunability in electrostatic MEMS. J. Appl. Phys. 2019, 126, 014501.
- Pallay, M.; Miles, R.N.; Towfighian, S. A Tunable Electrostatic MEMS Pressure Switch. IEEE Trans. Ind. Electron. 2020, 67, 9833–9840.
- Pallay, M.; Towfighian, S. Feasibility study of a capacitive MEMS filter using electrostatic levitation. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019.
- Mousavi, M.; Alzgool, M.; Towfighian, S. Electrostatic levitation: An elegant method to control MEMS switching operation. Nonlinear Dyn. 2021, 104, 3139–3155.
- Mousavi, M.; Alzgool, M.; Towfighian, S. Autonomous shock sensing using bi-stable triboelectric generators and MEMS electrostatic levitation actuators. Smart Mater. Struct. 2021, 30, 065019.
- Pallay, M.; Miles, R.N.; Towfighian, S. Towards a high bias voltage MEMS filter using electrostatic levitation. Mech. Syst. Signal Process. 2021, 150, 107250.
- Ozdogan, M.; Towfighian, S.; Miles, R.N. Fabrication and Experimental Characterization of a MEMS Microphone Using Electrostatic Levitation. In Proceedings of the 2019 IEEE Sensors, Montreal, QC, Canada, 27–30 October 2019.
- Ozdogan, M.; Towfighian, S.; Miles, R.N. Modeling and Characterization of a Pull-in Free MEMS Microphone. IEEE Sens. J. 2020, 20, 6314–6323.
- Hasan, M.N.; Pallay, M.; Towfighian, S. Threshold Pressure Sensing Using Parametric Resonance in Electrostatic MEMS. In Proceedings of the 2019 IEEE Sensors, Montreal, QC, Canada, 27–30 October 2019; pp. 4–7.
- Zamanzadeh, M.; Jafarsadeghi-Pournaki, I.; Ouakad, H.M. A resonant pressure MEMS sensor based on levitation force excitation detection. Nonlinear Dyn. 2020, 100, 1105–1123.
- Poletkin, K. Static Pull-in Behavior of Hybrid Levitation Micro-Actuators: Simulation, Modelling and Experimental Study. IEEE/ASME Trans. Mechatron. 2020, 4435, 1–11.
- Mousavi, M.; Alzgool, M.; Towfighian, S. A MEMS Pressure Sensor Using Electrostatic Levitation. IEEE Sens. J. 2021, 21, 18601–18608.
- Mayberry, M.; Ludois, D.C.; Severson, E.L. Towards Electrostatic Levitation of Rotating Machines. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 270–277.
- Zamanzadeh, M.; Jafarsadeghi Pournaki, I.; Azizi, S. Bifurcation analysis of the levitation force MEMS actuators. Int. J. Mech. Sci. 2020, 178, 105614.
- Burugupally, S.P.; Perera, W.R. Dynamics of a parallel-plate electrostatic actuator in viscous dielectric media. Sens. Actuators A Phys. 2019, 295, 366–373.
- Admassu, D.; Durowade, T.; Velicu, S.; Sivananthan, S.; Gao, W. Estimation of the mechanical stiffness constant of MEMS-based parallel-plate micro-actuators. Microsyst. Technol. 2021, 27, 2751–2759.
- Sano, C.; Ataka, M.; Hashiguchi, G.; Toshiyoshi, H. An electret-augmented low-voltage MEMS electrostatic out-of-plane actuator for acoustic transducer applications. Micromachines 2020, 11, 267.
- Alcheikh, N.; Ramini, A.; Al Hafiz, M.A.; Younis, M.I. Tunable clamped-guided arch resonators using electrostatically induced axial loads. Micromachines 2017, 8, 14.
- Schmitt, L.; Hoffmann, M. Large stepwise discrete microsystem displacements based on electrostatic bending plate actuation. Actuators 2021, 10, 272.
- Thewes, A.C.; Schmitt, P.; Löhler, P.; Hoffmann, M. Design and characterization of an electrostatic constant-force actuator based on a non-linear spring system. Actuators 2021, 10, 192.
- Akiyama, T.; Shono, K. Controlled Stepwise Motion in Polysilicon Microstructures. J. Microelectromech. Syst. 1993, 2, 106–110.
- Li, L.; Brown, J.G.; Uttamchandani, D. Study of scratch drive actuator force characteristics. J. Micromech. Microeng. 2002, 12, 736–741.
- Basset, P.; Kaiser, A.; Bigotte, P.; Collard, D.; Buchaillot, L. A large stepwise motion electrostatic actuator for a wireless microrobot. In Proceedings of the Fifteenth IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, USA, 24 January 2002; pp. 606–609.
- Donald, B.R.; Levey, C.G.; McGray, C.G.; Paprotny, I.; Rus, D. An untethered, electrostatic, globally controllable MEMS micro-robot. J. Microelectromech. Syst. 2006, 15, 1–15.
- Esteves Moreira, E.; Lima, V.; Serra Alves, F.; Cabral, J.; Gaspar, J.; Rocha, L.A. Full-gap tracking system for parallel plate electrostatic actuators using closed-loop control. Sens. Actuators A Phys. 2016, 244, 174–183.
- Veroli, A.; Buzzin, A.; Frezza, F.; de Cesare, G.; Hamidullah, M.; Giovine, E.; Verotti, M.; Belfiore, N.P. An approach to the extreme miniaturization of rotary comb drives. Actuators 2018, 7, 70.
- Woo, J.; Hahn, B.; Ahn, C. Position estimator design for a mems top-drive electrostatic rotary actuator. Sensors 2020, 20, 7081.
- Kurmendra; Kumar, R. A review on RF micro-electro-mechanical-systems (MEMS) switch for radio frequency applications. Microsyst. Technol. 2021, 27, 2525–2542.
- Chen, C.; Zhang, T. A review of design and fabrication of the bionic flapping wing micro air vehicles. Micromachines 2019, 10, 144.
- Phung, H.; Nguyen, C.T.; Jung, H.; Nguyen, T.D.; Choi, H.R. Bidirectional tactile display driven by electrostatic dielectric elastomer actuator. Smart Mater. Struct. 2020, 29, 035007.
- Carneiro, F.; Zhang, G.; Osada, M.; Yoshimoto, S.; Yamamoto, A. An Extended Model for Ripple Analysis of 2–4 Phase Resonant Electrostatic Induction Motors. Actuators 2021, 10, 291.
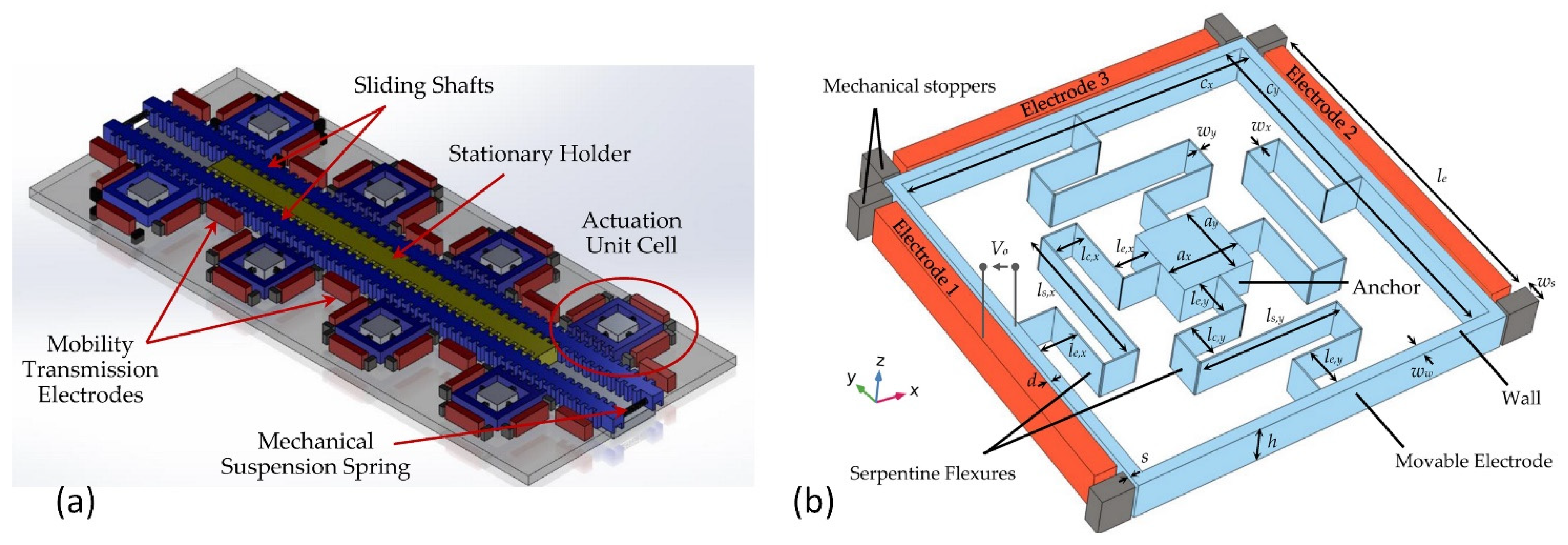
- Albukhari, A.; Mescheder, U. Investigation of the dynamics of a 2-DoF actuation unit cell for a cooperative electrostatic actuation system. Actuators 2021, 10, 276.
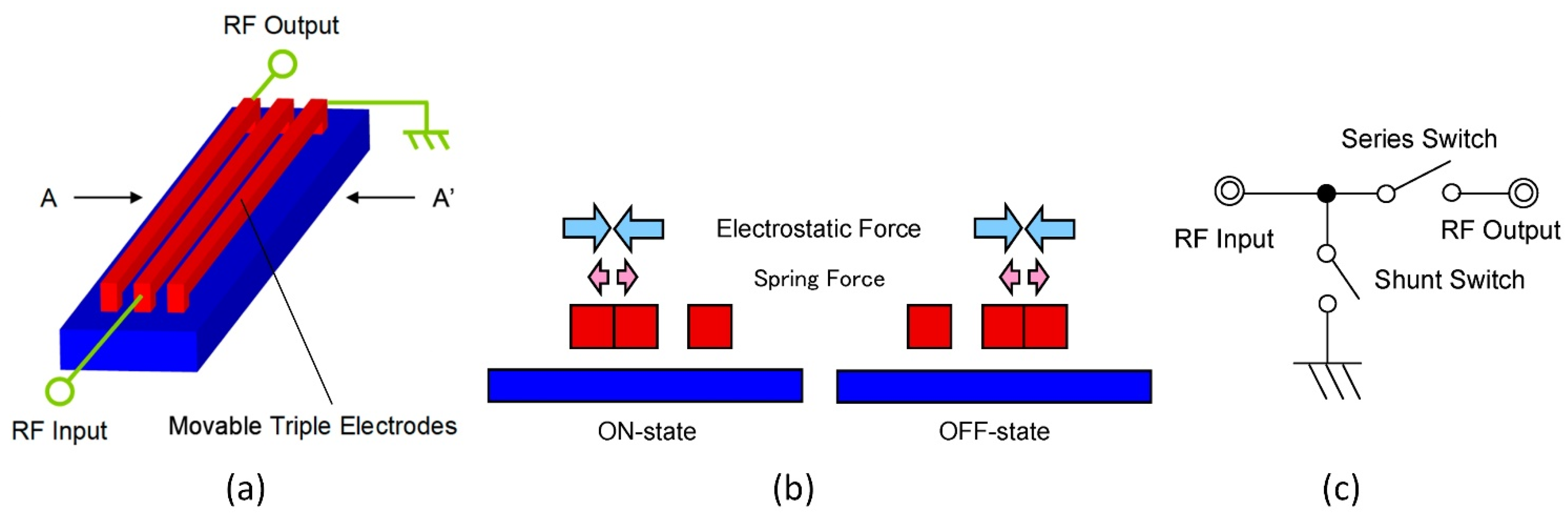
- Naito, Y.; Nakamura, K.; Uenishi, K. Laterally movable triple electrodes actuator toward low voltage and fast response RF-MEMS switches. Sensors 2019, 19, 864.
- Uvarov, I.V.; Kupriyanov, A.N. Stiction-protected MEMS switch with low actuation voltage. Microsyst. Technol. 2019, 25, 3243–3251.
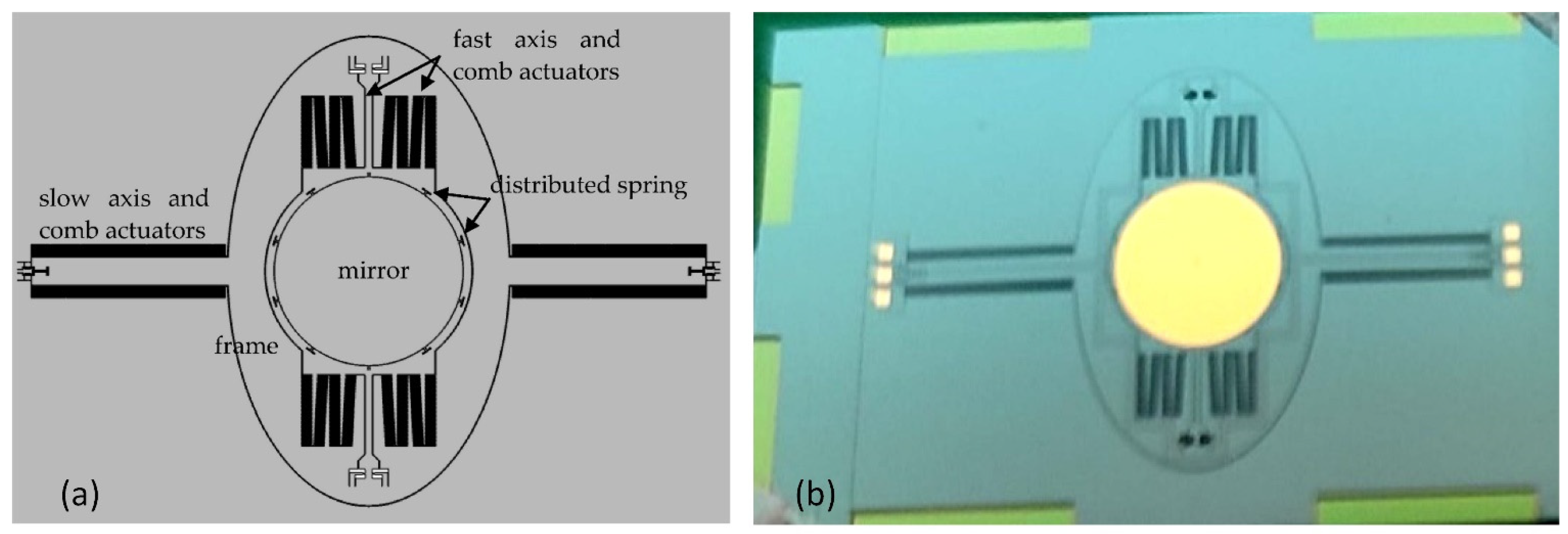
- Wang, Q.; Wang, W.; Zhuang, X.; Zhou, C.; Fan, B. Development of an electrostatic comb-driven mems scanning mirror for two-dimensional raster scanning. Micromachines 2021, 12, 378.
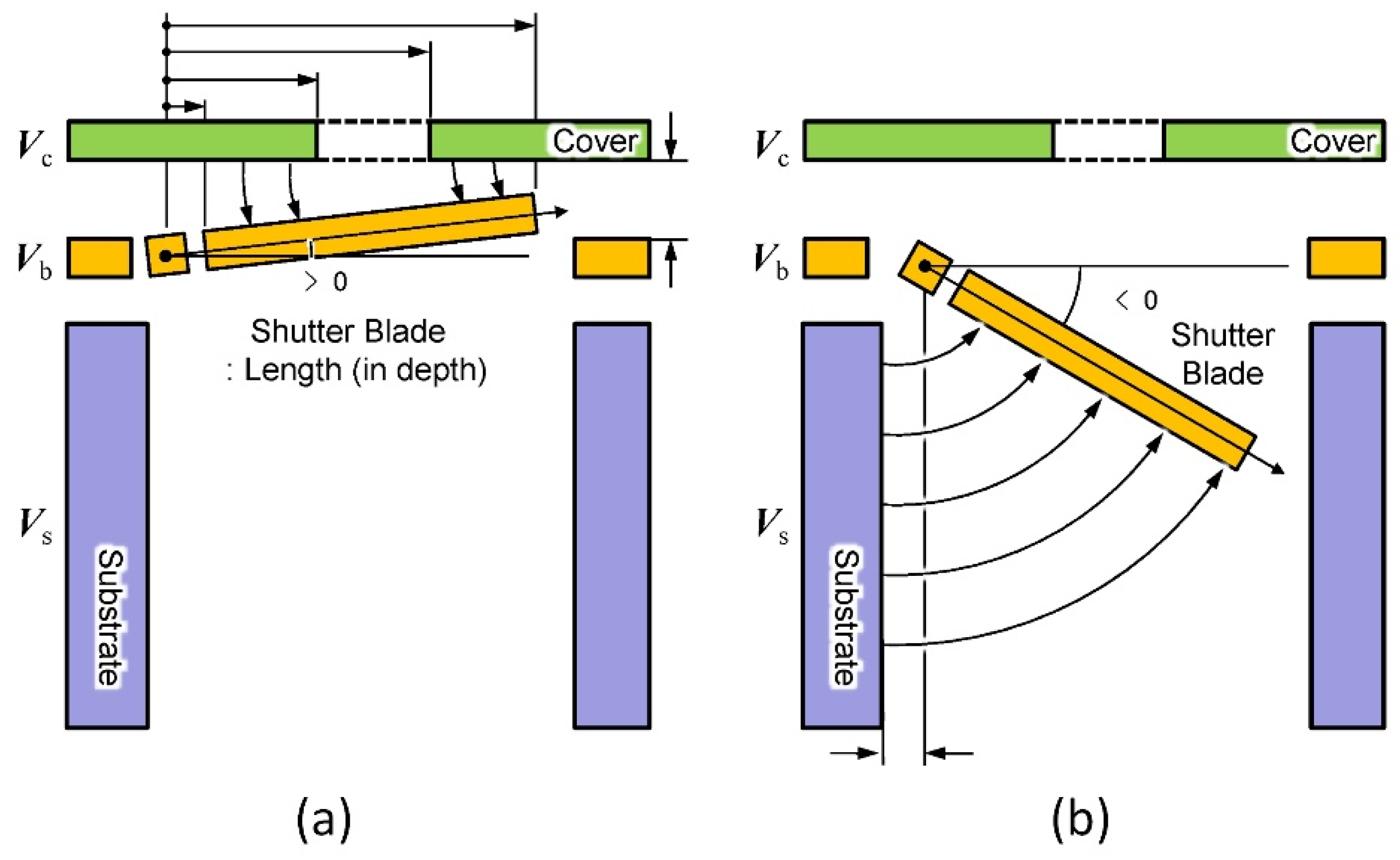
- Liu, X.; Takahashi, T.; Konishi, M.; Motohara, K.; Toshiyoshi, H. Random access addressing of MEMS electrostatic shutter array for multi-object astronomical spectroscopy. Micromachines 2020, 11, 782.
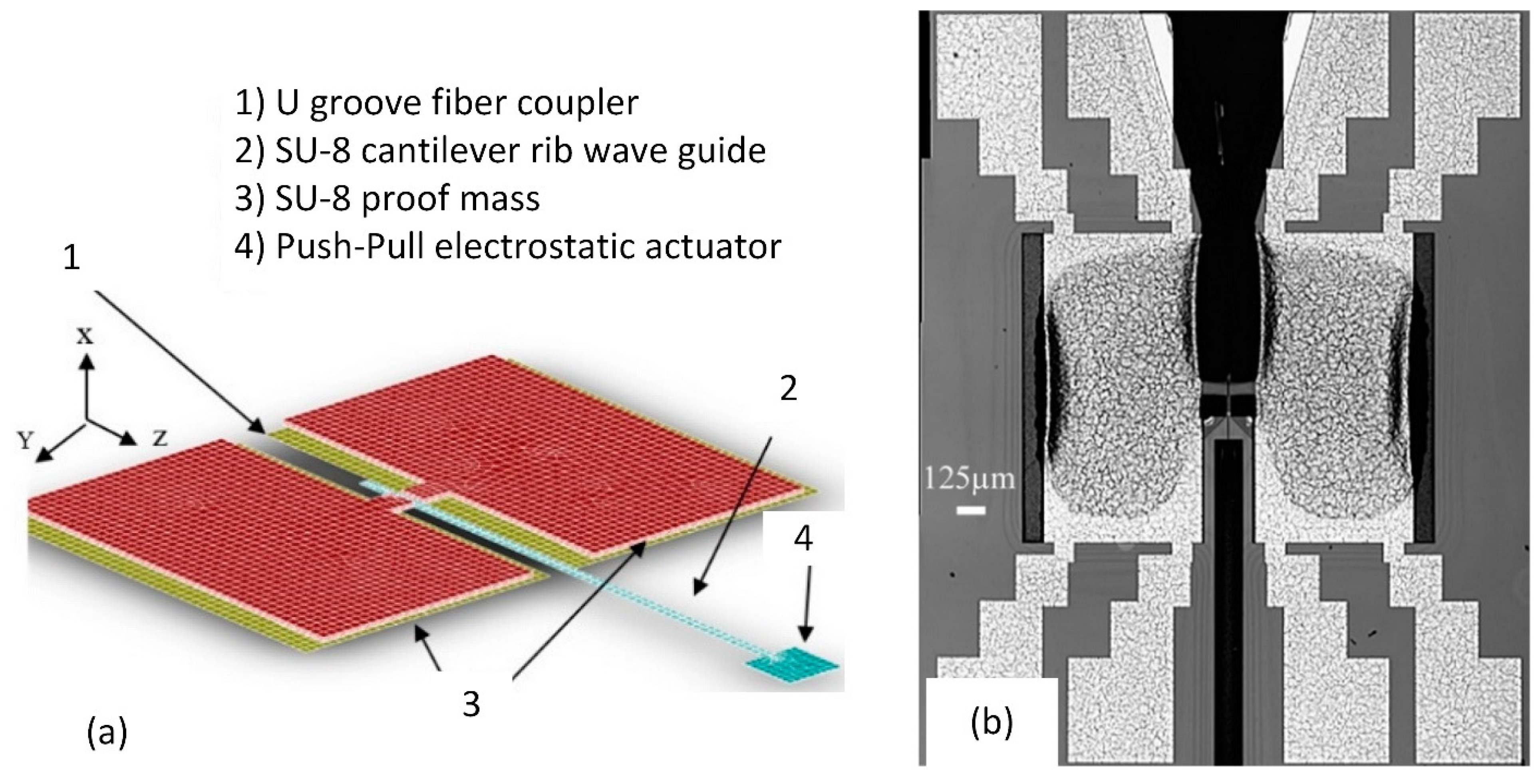
- Wang, W.C.; Gu, K.; Tsui, C.L. Design and fabrication of a push-pull electrostatic actuated cantilever waveguide scanner. Micromachines 2019, 10, 432.
- Leroy, E.; Hinchet, R.; Shea, H. Multimode Hydraulically Amplified Electrostatic Actuators for Wearable Haptics. Adv. Mater. 2020, 32, 2002564.